单相有源功率校正电路
单相电源功率因数校正驱动电路的分析与改进
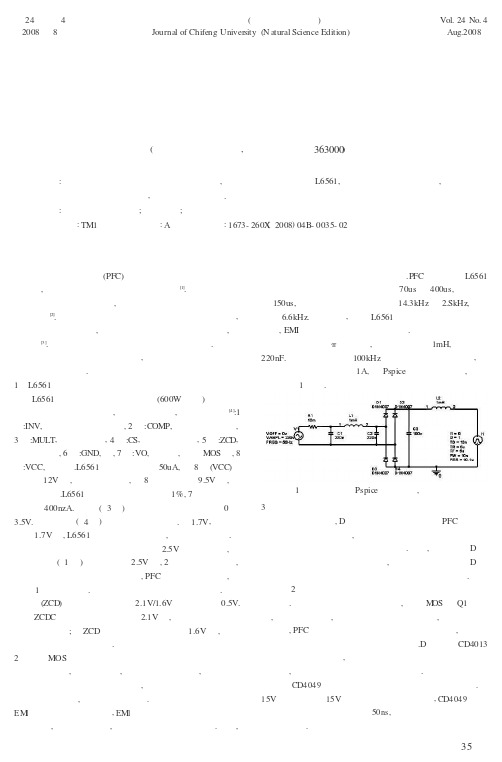
功率因数校正技术(PF C)是功率电子学所研究的重要技术之一,它是开关电源节约能源的重要手段[1].通常所采用的拓扑结构是升压电路模式,它可以达到较好地提高功率因数的目的[2].但是这种电路在可靠性方面有一个突出的问题,即在电源电压升高时,会使电网中流动的电流大大增加,烧毁设备[3].电力设备的可靠性是一项非常重要的指标.电力设备的故障会造成极大的经济损失,因此对可靠性的研究具有重大的现实意义.1L6561工作原理L6561是目前较为流行的小功率(600W 以下)有源功率因数校正电路的控制芯片,它有八个引脚,具体功能为[4]:1脚:INV,误差放大器反相输入,2脚:COMP,误差放大器输出,3脚:MULT ,乘法器输入,4脚:CS ,电流采样输入,5脚:ZCD ,零电流检测,6脚:GND,地,7脚:VO,输出端,驱动MOS 管,8脚:VCC,电源端.L6561的启动电流为50uA,当8脚(VCC)电压超过12V 时,电路开始工作,当8脚电压低于9.5V 时,电路将会关闭.L6561内部参考电压精度为1%,7脚的驱动能力为士400nzA.乘法器(3脚)输入电压的线性范围是0至3.5V.电流采样端(4脚)的采样信号幅度为.至1.7V ,当电压超过1.7V 时,L6561会判定电路过电流,关闭输出脉冲.误差放大器的同相输入端在内部连接到2.5V 的参考电压,因此当反相端(1脚)的电压大于2.5V 时,2脚的电压会降低,使允许流过采样电阻的电流减小,PFC 的输出电压降低,从而使1脚电压下降.因此这是一个闭环的负反馈控制.零电流检测(ZCD )引脚的闽值电压为2.1V/1.6V 滞回电压为0.5V.即当ZCD C 引脚信号上升沿经过2.1V 时,零电流检测比较器输出低电平;当ZCD 引脚信号下降沿经过1.6V 时,零电流检测比较器输出高电平.2功率MOS 管的驱动信号中断是产生问题的根源一般来说,正常的电路,高频开关是连续的,然而某些电路有可能由于各种原因而停振,并在间隔了一段时间后又重新振荡工作,即产生间歇振荡当间歇振荡的频率接近M 滤波器的截止频率时,M 滤波电路非但起不到抑制噪声的作用,反会产生振荡,对噪声起到了放大的作用因此,间歇振荡的频率是很关键的一个参数.P FC 控制芯片L6561内部的重启动定时器的定时范围为70us 到400us,典型值为150us,所对应的间歇振荡频率为14.3kHz 到2.SkHz ,典型值为6.6kHz .由此可知,一旦L6561的重启动定时器连续地工作,EMI 滤波器就会有可能发生振荡.对于一般的!型电路,电感量约为1mH,电容为220nF.在正常的频率为100kHz 的功率因数校正电路中,若升压电感的峰值电流为1A,用Pspice 对其进行仿真,仿真电路如图1所示.3驱动信号延迟的分析与对策在保护电路中,D 触发器的时钟信号是从PFC 控制芯片的输出驱动脉冲取得,这是因为电感两端电压极性的变化和控制芯片输出驱动脉冲是同步的.但是,如果不对D 触发器的时钟脉冲的时序进行控制,很有可能会产生在D 触发器数据端的信号还没有稳定时就已经被触发的问题.下面结合图2分别讨论控制芯片输出脉冲的上升沿和下降沿两种情况.在输出脉冲的上升沿到来时,功率M OS 管Q1被开通,漏极电压下降,电感两端电压为电源电压,电感电流线性上升,PFC 控制芯片不进行电感电流的过零检测,因此保护电路此时也不必进行绕组的电压检测.D 触发器CD4013的时钟是上升沿触发,所以此刻对应的应该是时钟脉冲的下降沿,以忽略这个时候的绕组电压检测.在中间插入一个反相器D 即可实现这种上升沿和下降沿的转换在5V 供电电源和5V 输入信号电平的情况下,D 的低电平到高电平转换的延迟为5,因此由此引入的延迟可以忽略不计图1滤波网络的Pspic e 仿真电路,无间歇振荡单相电源功率因数校正驱动电路的分析与改进黄海山(漳州城市职业学院,福建漳州363000)摘要:在分析功率因数校正技术原理的基础上,结合某公司的控制芯片L6561,剖析了其造成事故的原因,提出了针对驱动电路信号中断的一种解决方法,取得了较好的结果.关键词:有源功率因数校正;保护电路;过压振荡中图分类号:TM1文献标识码:A文章编号:1673-260X (2008)04B-0035-02Vol.24No.4Aug.2008第24卷第4期2008年8月赤峰学院学报(自然科学版)Journa l of Chife ng Univer sity (N a tural Sc ie nce Edition)35.E l E l .C 4049.11C 40490ns .图2改进的APFC电路方案,虚线框中为改进部分的电路在输出脉冲的下降沿到来时,功率MOS管Q1被关断,漏极电压上升,电感两端电压下降,极性翻转,电感电流通过升压二极管续流,PF C控制芯片进行电感电流的过零检测.在电压比较器LM393A将信号送到触发器数据端并稳定后,应该使D触发器触发.由十寄生电容的作用,功率MOS管关断后漏极电压不会立即升高到稳态值,而是升压电感和寄生电容产生谐振,电压上升速率受寄生电容容量大小的影响.这个寄生电容主要是功率MOS管内部的电容,有时也包括并联在MOS管漏、源两端的吸收电容.另外,控制芯片输出脉冲的下降沿到来时,功率MOS管是不会被瞬间关断的,这主要是由存在于功率MOS管内部的栅极和漏极的米勒电容造成的.为了估算这个延迟的具体时间,下面对功率MOS管的内部构造和关断过程进行分析.对照功率MOS管的内部构造,可以对这三个电容作进一步的分析.在栅极周围的寄生电容有:栅极对源极金属的电容C4,栅极对源极N+扩散区的电容C3,栅极对P区的电容C6和CS,其中CS的电容量是变化的,它受漏极电压和沟道长度的影响,但即使漏极电压从零升高到击穿电压,它的变化也是非常小的,所以在实际应用中可以认为它基本不变.另外一个重要的栅极电容是栅极对漏极的电容,它由两部分组成,一个是固定电容C1,另一个是电容量随漏极电压变化而变化的电容C2.当漏极电压变化时,N-扩散区与栅极C1附近相邻的部分的面积会发生变化,所以C2是随着漏极电压的变化而变化的.由下面的计算公式可以得到结论:当V D S!B时,随着漏极电压的升高,电容Cgd的电容量将下降,并符合关系式C gd∞(1-k V ds!).由此可见,当MOS管的输入电容Ciss是随着漏、源电压的增加而减小的.在关断一个功率MOS管时,一开始功率MOS管的输入电容容量较大,由于在栅极驱动电路中有栅极电阻,所以栅极电压的下降速度与栅极电阻的阻值成反比例关系[5].在栅极电压下降到闽值电压时,功率M OS管开始要关断,漏极电压开始要上升,由于漏极电压的上升,使得栅、漏电容Cg d被充电,充电回路是从漏极经过Cgd到栅极电阻,再从控制芯片的驱动口到地.若功率因数校正电路的输出电压为400V,则功率MOS管的漏极电压是从0V上升到400V,计算其上升时间的公式为:dt=C gt400(1)因此漏极电压的上升时间由流过的电流大小决定这个电流也就是流经栅极电阻R.的电流.而栅极电压近似保持在闽值电压附近,所以流过栅极的电流是近似不变的,其值为:i G=V thR G.若芯片的关断电压为0.3V,功率M OS管的闽值电压Vth为3.5V,栅极电阻为10",则流过栅极的电流为:iG=V thRG=3.510=350mA,若Cgd为500PF,则根据式一可得到漏极电压上升时间为:dt=C gt400i c=500×10-12400350×10-3 =571ns.可见,对漏、源电容C gd的充电电流是恒定的,其大小由栅极电阻的阻值决定.虽然短路栅极电阻可以增大驱动电流,但为了避免在栅极产生电压振铃,一般还是要加上一个几欧姆的栅极电阻.通过以上分析得出一个结论:从驱动脉冲的下降沿到来,到功率MOS管被彻底关断,其中间必然有一段不可忽略的时间,这是保护电路设计中必须要考虑的时序问题.所以,在图2中,加上了由R8和C4组成的RC延时网络,并经过反相器CD4049反相后,将PFC控制芯片的驱动脉冲送入D触发器CD4013的时钟端.由于这个RC网络的作用是将驱动脉冲的下降沿进行延迟,所以在R8上并联了一个二极管D6,使这个RC网络对驱动脉冲的上升沿不作延迟.同时,D6也有另外一个作用.因为驱动脉冲的脉宽和频率是变化的,所以如果脉冲的宽度太窄,即高电平时间太短,则C4还来不及被充电到稳定的高电平,就开始被放电,将会缩短对驱动脉冲下降沿的延迟时间.这是因为反相器CD4049输入端判断低电平的闽值电压不变,若电容C4充电不足,则其两端电压下降到闽值电压的时间就会较短;而如果电容C4每次都被充电到稳定的高电平,则每次下降到闽值电压的时间就能保持不变.4结论早期的功率因数校正技术非常简单,只是一个补偿相位的网络,但现在已被先进的有源功率因数校正技术所代替.实用的三相电源的有源功率因数校正技术是目前国际电力电子界的研究热点,是尚未解决的一道难题.本文研究了单相电源有源功率因数校正技术应用中的可靠性问题.首先介绍某公司的L6561,然后对现有技术的缺陷作了分析,对功率M OS管的驱动信号中断问题,设计了驱动等电路,取得了较好的结果.———————————————————参考文献:〔1〕张占松,蔡宣二.开关电源的原理与设计(修订版).北京:电子工业出版社,2004.〔2〕严百平,刘健,程红丽.不连续导电模式高功率因数开关电源.北京:科学出版社,2000.〔3〕邢岩,蔡宣二.高频功率开关变换技术.北京:机械工业出版社,2005.〔4〕原田耕介,耿文学译.开关电源手册(第2版).北京:机械工业出版社,2004.〔5〕Erickson,R obert S eca uc us,NJ,US A:Kluwer W“Fun-da mentals of Powe r Elec tronics,Sec ond Edition”Aca-,36i cC gd.demic Publishers2000:79-81.。
单相ACDC变换电路设计
题目:单相AC-DC变换电路(A题)摘要本设计综合考虑题目基本部分和发挥部分的指标要求,系统在AC-DC变换电路中采用基于SG3525的推挽式升压对交流信号经过整流滤波后的直流信号进行升压变换;由AD芯片TLC549和单片机STC89C51组成系统测控与显示单元,采用液晶显示器1602作为系统的状态和运行数据显示屏。
该系统由AC-DC变换电路,功率因数提高电路,测量与显示等几个模块构成。
通过实际测试,该系统在指定条件下能够使输出直流电压稳定在36V,输出电流额定值为2A;负载调整率,电压调整率,功率因数的测量与误差控制,输出过流保护功能等基本要求均得以实现;功率因数的校正达到了发挥部分的要求。
另外,系统还增加了实时输出电压电流数据显示等实用功能。
一方案论证1.DC-DC升压方式的比较与选择在AC-DC变换电路中,先对交流电压进行整流滤波得到直流电压,在对其进行DC-DC 升压变换。
因此首先选择DC-DC升压方式。
方案一:全桥加DC-DC变换方式。
脉冲变压器原边是两个对称线圈,两只开关管接成对称关系,轮流通断。
推挽式电源电压利用率高、输出功率大、能实现较大的升压比、两管基极均为低电平、输入输出隔离,驱动电路简单。
主要缺点:变压器绕组利用率低、对开关管的耐压要求比较高(至少是电源电压的两倍)。
方案二:全桥加滤波器变换方式。
由四只相同的开关管接成电桥结构驱动脉冲变压器原边。
与推挽结构相比,原边绕组减少了一半,开关管耐压降低一半。
主要缺点:使用的开关管数量多,且要求参数一致性好,驱动电路较复杂。
方案三:全桥和PFC以及DC-DC变换方式。
利用控制芯片输出的PWM波形来控制开关管的通断,并设计合理的主电路上的电感电容值来控制开关管的通断时间,从而达到升压的目的。
这种电路使用的外部原件最少、调试容易、成本低、效率高。
缺点:负载侧电流波动大。
综合考虑,我们选择方案一。
2.功率因数调整方案的比较与选择方案一:有源功率因数校正电路。
单相有源功率因数校正电路的设计与实现
单相有源功率因数校正电路的设计与实现一、引言二、单相有源功率因数校正电路的基本原理1. 有源功率因数校正的意义2. 单相有源功率因数校正电路的基本结构3. 单相有源功率因数校正电路的工作原理三、单相有源功率因数校正电路的设计与实现1. 电路参数的选择a. 功率因数调整范围的确定b. 过零检测器参数的选择c. 控制电路参数的选择d. 滤波器参数的选择2. 单相有源功率因数校正电路设计步骤a. 过零检测器设计b. 控制电路设计c. 滤波器设计3. 单相有源功率因数校正电路实现方法及注意事项a. 实现方法i) 负载侧串联法ii) 发生器侧串联法iii) 直接并联法b. 注意事项四、单相有源功率因数校正电路应用实例分析1. 实验平台搭建2. 实验过程及结果分析五、总结一、引言:随着工业化进程不断加快,电力负荷不断增加,电网中的功率因数问题越来越突出。
功率因数是指电路中有用功与视在功之比,它反映了电路的有功和无功的比例关系。
当负载中存在大量的感性元件时,会导致电路中存在一定的无功分量,这会使得电网中的无功负荷增加,降低了电网的供电能力和效率。
因此,在实际应用中需要对单相有源功率因数校正电路进行设计和实现。
二、单相有源功率因数校正电路的基本原理:1. 有源功率因数校正的意义:有源功率因数校正是指通过加入适当的无功补偿来改善系统或负载端的功率因数,达到提高系统效率、减少能耗、延长设备寿命等目标。
2. 单相有源功率因数校正电路的基本结构:单相有源功率因数校正电路主要由过零检测器、控制器、滤波器和逆变器等组成。
3. 单相有源功率因数校正电路的工作原理:单相有源功率因数校正电路通过检测交流信号波形上升沿或下降沿的时刻,控制逆变器输出电压的相位和幅值,使得负载侧电流与电压之间的相位差角度接近于零,从而达到功率因数校正的目的。
三、单相有源功率因数校正电路的设计与实现:1. 电路参数的选择:a. 功率因数调整范围的确定:根据实际应用需求来确定功率因数调整范围。
几种不同功率因数校正电路的比较研究

对于低端半控桥 PFC 电路, 双向开关前置的单相有源 PFC 电路没有检测电流用低阻值无感电阻. 电源 VS
通过电容滤波后, 由功率开关 V1 控制二极管的通断. 当 V1 处于通态时, 整流后得直流电压向电感 L1 充
电, 另外电容 C2 中存储的能量通过负载消耗, 由于
电容 C2 容量很大, 可以把它看作一个恒压源, 因此
果表明, 无源功率因数校正电路具有较大的位移角和位移因数, 功率因数校正效果一般; 而有源功率因数校正电路只有极
小的位移角和位移因数, 基本上不产生失真. 无源功率因数校正技术消除谐波结构简单、设计成本低, 但功率因数校正效果
差; 有源功率因数校正技术结构复杂, 设计成本较高, 但功率因数校正效果好, 能够消除谐波和减小无功功率.
0.9965
0.996
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
(a) 输入电压与输入电流波形
(b) 输出直流电压波形 图 4 低端半控桥的单相有源 PFC 电路仿真结果
(c) 输入功率因数值波形
3 双向开关前置的单相有源 PFC 电路仿真
双向开关前置的单相有源 PFC 电路[7]采用四个功率开关控制四个二极管, 其电路结构如图 5 所示. 相
0.2
0.1
0
0.13
0.132
0.134
0.136
0.138
0.14
0.142
0.144
0.146
0.148
0.15
(a) 输入电压与输入电流波形
(b) 功率因数值波形
图 2 基于谐振电抗器的单相无源 PFC 电路仿真结果
第8章 有源功率因数校正技术
第8章 有源功率因数校正技术
第8章 有源功率因数校正技术 8.1 单相有源功率因数校正原理
8.2 CCM单相BOOST功率因数校正变换器
8.3 DCM单相BOOST功率因数校正变换器 8.4 其他单相功率因数校正变换技术 8.5 三相PFC原理 8.6 本章小结
8.1 单相有源功率因数校正原理 8.1.1 电阻负载模拟
8.3.1 CRM单相BOOST功率因数校正变换器电路分析
8.3.1 CRM单相BOOST功率因数校正变换器电路分析
8.3.1 CRM单相BOOST功率因数校正变换器电路分析
图8-26 开关频率极小值与 输入电压有效值的关系
8.3.1 CRM单相BOOST功率因数校正变换器电路分析
8.3.1 CRM单相BOOST功率因数校正变换器电路分析
8.4.3 窗口控制功率因数校正变换电路
图8-37 窗口功率因数校正变换电路实现方式
8.5 三相PFC原理 8.5.1 三相单开关Boost PFC电路的控制
8.5.2 三相六开关PFC电路的控制
8.5.3 其他三相PFC电路
8.5 三相PFC原理
图8-38
三相单开关Boost PFC电路
8.5.1 三相单开关Boost PFC电路的控制 1.工作原理
8.3.2 CRM单相BOOST功率因数校正变换器的控制
图8-27 CRM单相BOOST功率因数校正 变换器的控制框图
8.4 其他单相功率因数校正变换技术 8.4.1 无桥型功率因数校正变换电路
8.4.2 低频开关功率因数校正变换电路
8.4.3 窗口控制功率因数校正变换电路
8.4.1 无桥型功率因数校正变换电路
8.2.2 CCM单相BOOST功率因数校正变换器的控制
由单相功率因数校正PFC实现三相PFC的方案介绍
由单相功率因数校正PFC实现三相PFC的方案介绍引言电力电子装置的广泛应用,给公用电网造成严重污染,谐波和无功问题日益受到重视。
为了减轻电力污染的危害程度,许多国家纷纷制定了相应的标准,如国际电工委员会的谐波标准IEEE555—2和IEC—1000—3—2等。
功率因数校正(Power Factor CorrecTIon,简称PFC)技术,尤其是有源功率因数校正(Active Power FactorCorrection,简称APFC)技术可以有效的抑制谐波,已成为研究的热点。
单相APFC技术的研究比较成熟,已有不少商业化的专用控制芯片,如UC3854,IRll 50,LTl508,ML4819。
与单相功率因数校正整流装置相比,三相PFC整流装置具有许多优点:(1)输入功率高,功率额定值可达几千瓦以上;(2)单相PFC整流装置输入功率是一个两倍于工频变化的量,但在三相平衡装置中,三相输入功率脉动部分的总和为零,输入功率是一恒定值,三相PFC整流装置输出功率的脉动周期仅为单相全波整流的三分之一,脉动系数低,因此可以使用容量较小的输出电容,从而可以实现更快的输出电压动态响应。
三相APFC技术正成为众多学者研究的重点,但其实现有一定的困难,而且还未见成熟的专用控制芯片。
若能将单相APFC电路简单整合成一个三相APFC电路,将能充分利用成熟的单相控制芯片,制作出满足要求的三相APFC装置。
1 由单相APFC组合成三相APFC的几种方法单相PFC组合成三相PFC的技术优势是:(1)无需研究新的拓扑和控制方式,可直接应用发展比较成熟的单相PFC拓扑,以及相应的单相PFC控制芯片和控制方法;(2)电路由多个单相PFC同时供电,如果某一相出现故障,其余两相仍能继续向负载供电,电路具有冗余特性;(3)由于单向模块的使用,因此需要更少的维护和维修,而且有利于产品的标准化;(4)与三相PFC相比,不需要高压器件等。
下面将对由单相PFC实现三相PFC的几种方法分别进行介绍。
单相有源功率因数校正电路仿真

单相有源功率因数校正电路仿真摘要:传统的AC-DC 变换器的广泛应用对电网产生了大量的谐波污染。
有源功率因数校正技术(APFC)是抑制谐波电流、提高功率因数的行之有效的办法。
本文论述了单相功率因数校正APFC 的原理和方法,通过对Boost 型滞环控制的DC-DC 变换器采用Matlab 进行仿真,获得了最后校正的功率因数结果,说明这种PFC 方案的能获得良好的效果,适用于多种场合。
关键词:有源功率因数校正,Boost 电路,滞环控制1 绪论功率因数指的是有效功率与总耗电量(视在功率)之间的关系。
功率因数可以衡量电力被有效利用的程度,当功率因数值越大,代表其电能利用率越高。
交换式电源供电器上的功率因数校正器的运作原理是通过控制调整交流电电流输入波形,使其与直流电电压波形尽可能一致,让功率因数趋近于1.折对于电力需求量达到某一个水平的电子设备而言是很重要的,否则,电力设备系统消耗的电能可能超出其规格,极可能干扰同系统的其他电子设备。
2 功率因数的定义和校正原理根据电工学的基本理论功率因数(PF )的定义:交流输入有功功率(P )与视在功率(S )的比值,用公式表示为:1111cos cos cos rms rmsU I I P PF S U I I φφγφ==== (1) 式中:1U 表示输入基波电流有效值;cos φ表示基波电压与基波电流之间的位移因数;γ表示输入电流畸变因数;rms I 表示输入电流有效值。
可见PF 由电流畸变因数γ和位移因数cos φ决定,cos φ小表示用电设备的功率大,在有功功率不变的情况下实在功率增加,线路总电流增大,线路传输压降也将增大,倒是电气设备容量增加,利用率低,导线、变压器绕组损耗大,严重影响电网的供电质量,变化快时甚至可以导致电网崩溃。
输入电流即便因数γ值低,表示输入电流谐波分量大,将造成输入电流波形畸变,对电网造成污染,使用电设备产生机械振动、噪声、过电压,损坏电子设备。
有源功率因数校正技术及控制方式分析
个电流控制环,它是一个2型控制系统.按照控制
理论,2型系统可以无差地跟踪斜坡信号,由于正 弦波信号变化比斜坡信号慢,所以2型系统也可 以无差地跟踪正弦波信号. 电流控制环的作用是使输入电流无差地跟踪 输入电压的波形,让输人电流与输人电压具有同 相的正弦波波形,以达到功率因数校正的目的.双
即有源功率因数校正电路工作原理有源功率因数校正电路流器和负载之间接入一个开关变换器应用电压电流反馈技术使输入端电流波形跟随输入正弦电压波形从而使输入电流的波形也接近正弦波以达到提高功率因数的目的由于在此电路中使用了有源器件所以称为有源功率因数校正电路该电路的基本思想是交流输入电压经全波整流后对所得的全波整流电压进行变换通过适当控制使输入电流波形自动跟随全波整流后的电压波形达到输入电流的正弦化同时保持输出电压稳定是在整有源功率因数校正电路一般都是一个双闭环控制系统外环是一个电压控制环它是一个型控制系统按照控制理论型系统可以无差地跟踪阶跃信号只要输入一个不变的参考电压就可以得到一个稳定不变的输出电压电压控制环的作用是使输出保持一个高于输入电压最高峰值的稳定电压这是功率因数校正所必需的内环是一个电流控制环它是一个型控制系统按照控制理论型系统可以无差地跟踪斜坡信号由于正弦波信号变化比斜坡信号慢所以型系统也可以无差地跟踪正弦波信号电流控制环的作用是使输入电流无差地跟踪输入电压的波形让输入电流与输入电压具有同相的正弦波波形以达到功率因数校正的目的双上海电力学院学报年闭环控制的效果是使输入电流与输入电压呈同相的正弦波输出一个高于输入电压最大峰值的稳定直流电压这个稳定的直流为后级变换电路提供直流能量有源功率因数校正原理如图所示图有源功率因数校正原理图中主电路采用变换电路外环是一个电压误差放大器和一个模拟乘法器内环是驱动电路和电流比较器调节器采用电压电流双闭环控制方式电流反馈网络的取样信号是升压变换器的电感电流电压反馈网络的取样信号是调节器的输出电压该电路的工作原理如下单相交流电经过整流后得到单相双半波正弦电压信号此电压波形作为功率因数校正控制器的输入电流的参考波形输入到模拟乘法器为了保证输出电压恒定将输出电压通过电压反馈网络也引入乘法器经过乘法器运算后其结果作为电流波形的参考值并与实际取样的电流值进行比较然后通过驱动电路产生的驱动信号控制变换器的输出电流和电压由于采用了闭环控制将变换器的实际电流通过反馈网络引入电流比较器从而保证了变换器的电流能够准确跟踪乘法运算所规定的电流值有源功率因数校正方法分类根据有源功率因数校正拓扑分类有源功率因数校正电路按照其校正拓扑可分为降压式升降压式反激式和升压式其中降压式因噪音大滤波难以及功率开关管上电压应力大控制驱动电平浮动而极少被采用升降压式需要有一个功率开关管的驱动控制信号浮动电路复杂因而也
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验五:单相有源功率校正电路
(一)实验目的
1.掌握单相有源功率校正电路的工作原理,要求输出电压达到给定值,且网侧电流正弦化,功率因数为1;
2.掌握电压外环和电流内环的设计方法。
(二)实验原理
有源功率因数校正(Active Power Factor Correction APFC)电路,是指在传统的不控整流中融入有源器件,使得交流侧电流在一定程度上正弦化,从而减小装置的非线性、改善功率因数的一种高频整流电路。
基本的单相APFC电路在单相桥式不可控整流器和负载电阻之间增加一个DC-DC功率变换电路,通常采用Boost电路。
通过适当的控制Boost电路中开关管的通断,将整流器的输入电流校正成为与电网电压同相位的正弦波,消除谐波和无功电流,将电网功率因数提高到近似为1。
其电路原理图如图1所示。
假定开关频率足够高,保证电感L的电流连续;输出电容C足够大,输出电压u o可认为是恒定直流电压。
电网电压u i为理想正弦,即u i=U m sinωt,则不可控整流桥的输出电压u d为正弦半波,u d=u i=U m sinωt。
图1.APFC电路原理图
当开关管Q导通时,u d对电感充电,电感电流i L增加,电容C向负载放电;当Q关断、二极管D导通时,电感两端电压u L反向,u d和u L对电容充电,电感电
流i L减小。
电感电流满足下式。
通过控制Q的通断,即调节占空比D,可以控制电感电流i L。
若能控制i L近似为正弦半波电流,且与u d同相位,则整流桥交流侧电流i i也近似为正弦电流,且与电网电压u i同相位,即可达到功率因数校正的目的。
为此需要引入闭环控制。
控制器必须实现以下两个要求:一是实现输出直流电压u o的调节,使其达到给定值;二是保证网侧电流正弦化,且功率因数为1。
即在稳定输出电压u o的情况下,使电感电流i L与u d波形相同。
采用电压外环、电流内环的单相APFC双闭环控制原理如图2所示。
电压外环的任务是得到可以实现控制目标的电感电流指令值i L∗。
给定输出电压u o∗减去测量到的实际输出电压u o的差值,经PI调节器后输出电感电流的幅值指令I L∗测量到的整流桥出口电压u d除以其幅值U m后,可以得到表示u d波形的量u d′,u d′为幅值为1的正弦半波,相位与u d相同。
I L∗与u d′相乘,便可以得到电感电流的指令值i L∗。
i L∗为与u d′同相位的正弦半波电流,其幅值可控制直流电压u o的大小。
图2.APFC控制框图
电流内环的任务是通过控制开关管Q的通断,使实际的电感电流气跟踪其
指令值i L∗。
此处采用滞环电流控制方法。
根据电感电流的公式,当Q导通时电感电流增大,而当Q关断时电感电流减小。
令i L∗减去i L,若差值∆i L大于规定的上限∆i L max,则令Q导通,以增大i L;若差值∆i L小于规定的下限∆i L min (∆i L min<0),则令Q关断,以减小i L。
通过滞环控制,可以保证实际的电感电流i L在其指令值i L∗附近波动,波动的大小与滞环宽度有关,即与设定的∆i L max和∆i L min有关。
(三)实验内容
1.在MATLAB/Simulink中构建单相有源功率校正电路;
2.测量输入、输出电压波形,输入电流波形,并进行谐波分析。
(四)实验过程与结果分析
1.仿真系统
MATLAB平台
2.仿真参数
直流电压指令为400V的constant模块。
输入电压有效值为220V ,频率5OHz;输出直流电压指令u o∗为400V;电感L=6mH;电容C=320uF;负载电阻R=160Ω;在二极管整流桥中,Rs=1e5Ω,Cs=le-6F, Ron=le-3Ω,Lon=O,Vf=O;开关管Q采用MOSFET,Ron=0.OO1Ω,Lon=0,Rd=0.01Ω,Vf=O, Ic=0, Rs=1e5Ω,Cs=inf;Boost电路中二极管参数,Ron=0.001Ω,Lon=0,Vf=0.8V,Ic=0,Rs=5OOΩ,Cs=250e-9F。
滞环比较器与PID模块的参数设置,如图3所示。
图3.滞环比较器与PID模块的参数设置
3.仿真波形与分析
采用Boost电路的单相有源功率因数校正电路的仿真模型,如图4所示。
图4.APFC仿真模型
利用powergui将仿真设置为离散模型,Ts=1e-6。
起始结束时间为0~0.5s。
其他为默认参数。
直流电压波形如图5所示。
平均值为402V,如图6所示,基本满足控制器实现输出直流电压调节的要求。
对波形进行FFT分析,如图7所示,可知电压波动周期为0.01s,基本为工频的两倍。
图5.直流电压波形
图6.直流电压平均值
图7. FFT分析设置对话框及结果
输出i L与u d的波形、i i与u i的波形分别如图8、图9所示。
图8.i L与u d的波形
图9.i i与u i的波形
从图8可以看出电压电流基本同相位,即功率因数基本为1。
也可以通过观察fourier模块的相角,来判断电压电流是否同相位,如图9(左图)所示。
交流侧电流THD及基波功率,如图9(右图)所示。
图5.9电压电流相角、电流THD及基波功率i i的THD=0.1252,P=1061W,Q=-23.29Var。
有公式得,
ν=
1
1+THD2
=
1
1+0.12522
=0.9923
DPF=cosφ1=
P
P2+Q2
=
1061
10612+(−23.29)2
=0.9998
可计算总的功率因数为λ=νcosφ1=0.9921 ≈1。
4.结论
本实验所搭仿真模型,符合实验原理,满足控制器实现网侧电流正弦化,且功率因数为1的要求。