电子指南针
电子指南针工作原理

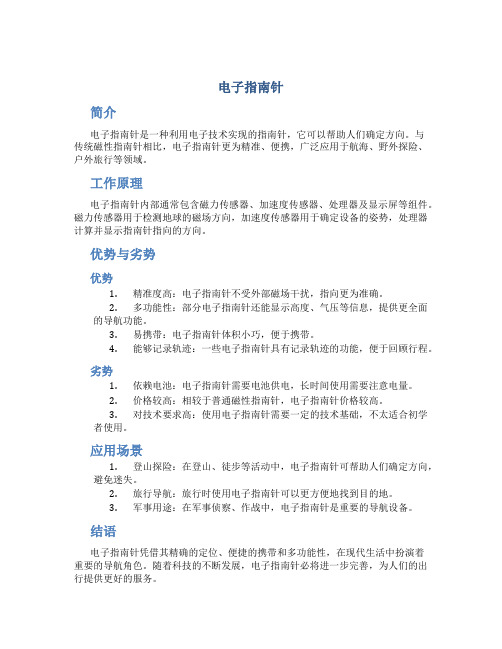
电子指南针工作原理1,电路参考附件,如图所示:2个电感表示传感器,在安装时,2个传感器相互成90度,保持水平位置。
由于大地是个磁场,传感器受地理磁场的影响而改变电感量,地理磁场可以沿传感器方向正交分解为X和Y。
(参考附件2)。
其中角度等于 TAN α=Y/X ;所以α =ARC TAN Y/X;2,刚开始,将X1,X2,Y1,Y1对应的单片机引脚设置为输出”,同时把X1,X2,Y2,Y2设置为低电平.将”OUTPUT”设置为输入.3延时100MS,等待电路稳定后,置X1为1,这时与门的输出高电平,经过R5,L1,R6流到另个与门的低电平,电感充电,经过一段时间,比较器番转,输出低电平,反馈给与门输入端.使得2个与门输出为低电平,电感放电,电压下降,经过一段时间,比较器又翻转,输出高电平,回到开始状态,这个过程一直在循环中.所以在”OUTPUT”一直输出方波.4在”OUTPUT”断有方波输出时,通过软件定时计数的办法来确定.为了提高测试精度,可以对200个或256个方波连续采样,把连续的200个方波总时间测出来. 把测得数值记为X1 5测完以后, 置X1为0,延时100MS,再把X2置为1,与1同样方法测方波周期. 把测得数值记为X2.那么在X方向上的磁场应强度为X2-X1.6,同3和4,可以把Y轴的磁场强度可以表示为Y2-Y1.7那么计算的实际角度为TANα=(Y2-Y1)/(X2-X1);如果Y2-Y1>0.X2-X1>0, α= ARC TAN(Y2-Y1)/(X2-X1);如果Y2-Y1<0.X2-X1<0, α= ARC TAN(Y2-Y1)/(X2-X1);如果Y2-Y1>0.X2-X1<0, α= 180 - ARC TAN(Y2-Y1)/(X2-X1);如果Y2-Y1<0.X2-X1<0, α=180 + ARC TAN(Y2-Y1)/(X2-X1);通过角度计算以后,把图形在LCD上显示出来,就OK了.开发流程.1,购买开发工具和电子源材料.(仿真器和烧录器,芯片)软件工程师需要在短时间内熟悉对其内部资源和语言集成开发环境.会进行IO口,定时寄存器,中断等相关配置.2,软件工程师需能驱动液晶能正常显示,显示一些常见的数字,直线等符号.3,按工作原理的3-7,进行编程,用示波器观察是否在”OUTPUT”有方波输出,否则要检查硬件电路.4,在仿真器上把电路调试好,看和实际情况是否一致?否则检查程序哪个地方有问题.5,在调试通过以后,把程序烧写到芯片里,焊在电路板上运行,看和仿真的结果是否一样.注意事项1,程序里要用到反三角正切函数,需要调用库函数头文件来实现.2,指南针指向的是地球磁场南极,而不是地理南极,这两者之间有点区别.3,该程序可能会出现误差,用”多点校正”的办法效果会更好.。
手机电子指南针传感器原理

手机电子指南针传感器原理1. 概述手机电子指南针传感器是一种使用传感技术来模拟真实指南针的设备。
它可以通过感知地球的磁场并确定地球的磁北极方向,从而提供准确的指南针功能。
本文将介绍手机电子指南针传感器的工作原理、应用以及相关注意事项。
2. 工作原理手机电子指南针传感器的工作原理基于磁场感应和方向识别原理。
手机电子指南针传感器通常由三个主要组件组成:磁力计、陀螺仪和加速度计。
2.1 磁力计磁力计是手机电子指南针传感器的核心组件之一。
它可以感知地球的磁场,并通过测量这个磁场的强度和方向来确定手机的朝向。
磁力计通常由磁铁敏感材料制成,其内部构造包含一个或多个磁敏传感器。
当这些传感器受到磁场的影响时,它们会产生电信号,手机通过处理这些信号获得地球磁场的方向信息。
陀螺仪是另一个关键组件,它可以感知手机的旋转和方向变化。
陀螺仪通过测量角速度来确定设备的旋转速度,从而帮助手机电子指南针传感器确定手机的方向。
陀螺仪通常由旋转的质量块和一些传感器组成,当设备发生旋转时,质量块的飞轮会随之旋转,传感器会感知到这个旋转并将其转换成电信号。
2.3 加速度计加速度计是一种用于测量手机加速度和姿态的传感器。
虽然它在手机电子指南针传感器中的作用相对较小,但对于改善指南针的精确度和稳定性仍具有重要意义。
加速度计可以感知手机在三个轴上的加速度变化,并根据这些变化来补偿传感器的输出,提供更准确的朝向信息。
3. 应用手机电子指南针传感器广泛应用于多种应用场景,包括导航、地图应用、虚拟现实和增强现实等领域。
手机电子指南针传感器在导航应用中发挥着重要作用。
通过获取准确的地理方向,手机电子指南针传感器可以帮助用户准确定位和导航。
无论是步行导航还是驾车导航,手机电子指南针传感器都可以提供准确的方向指引,使用户更容易到达目的地。
3.2 地图应用手机电子指南针传感器也被广泛应用于地图应用中。
通过结合地理位置信息和指南针传感器提供的朝向,地图应用可以提供更加实用和直观的导航体验。
手机电路板指南针怎么用

手机电路板指南针怎么用指南针是一种常见的导航工具,用于确定方位的工具,它可以帮助我们在户外定位和导航。
而如今,手机电路板上已经配备了内置的电子指南针功能,使得我们可以方便地使用手机来实现导航。
本文将介绍手机电路板指南针的使用方法及相关考前须知。
1. 开启手机指南针功能大局部手机都已经默认开启了指南针功能,但在某些情况下,可能需要手动进行设置。
在一般的Android手机上,我们可以通过以下步骤来开启指南针功能:1. 翻开手机设置菜单。
2. 在设置菜单中找到“位置〞或“定位效劳〞选项。
3. 确保“指南针〞选项处于开启状态。
苹果手机的操作方式类似,只是在设置菜单中的选项可能略有不同。
如果你的手机没有指南针功能,可以尝试下载第三方导航应用,很多应用都提供了类似的功能。
2. 翻开指南针应用一旦开启了手机的指南针功能,我们就可以翻开指南针应用程序来使用它。
大多数手时机预装有指南针应用,也可以从应用商店下载其他指南针应用。
在翻开指南针应用之后,手时机通过内置的传感器来检测磁场的变化,并将其转化为方向信息。
3. 校准指南针在使用手机指南针之前,我们需要先对其进行校准,以确保其准确度。
校准指南针的方法可能因手机型号和应用程序而异,以下是一个通用的校准步骤: 1. 翻开指南针应用程序。
2. 在应用程序中找到校准选项。
3. 按照应用程序的指示,将手机沿着三个不同的轴旋转数次,以完成校准过程。
在进行校准时注意以下几点: - 尽量防止周围有大型金属物体,因为它们可能会对指南针的准确性产生干扰。
- 尽量保持手机平稳,防止晃动。
4. 使用手机指南针一旦指南针完成校准,我们就可以开始使用它进行导航了。
以下是一些常见的使用场景和技巧: - 当我们需要知道当前的方向时,可以翻开指南针应用并查看指示。
通常,指南针应用会显示当前的方位角。
- 如果我们需要朝一个特定的方向前进,我们可以将手机指南针的指针与所需的方向进行对齐,然后随着手机的转动和方向的变化,即可沿着目标方向前进。
指南针的发展历程

指南针的发展历程引言概述:指南针是一种用于确定方向的仪器,它在人类历史上扮演了重要的角色。
本文将介绍指南针的发展历程,从古代的磁石到现代的电子指南针,逐步展示了指南针的进步与演变。
一、古代的磁石指南针1.1 磁石的发现与应用古代人们最早发现了磁石的特性,它们有一种吸引铁物的力量。
人们开始将磁石用作指南针,通过观察磁石的指向来确定方向。
1.2 古代指南针的制作古代的指南针通常由一块磁石悬挂在一个支架上制成。
人们会将指南针浸泡在水中,以减小摩擦力,使其更加灵敏。
这种指南针虽然简单,但已经为古代航海和旅行提供了重要的导航工具。
1.3 古代指南针的局限性古代的磁石指南针虽然能够提供方向,但受到地磁场的影响较大,容易受到金属物体的干扰,导致指示不准确。
此外,磁石的磁力也会随着时间的推移而减弱。
二、罗盘的发展与改进2.1 罗盘的引入罗盘是指南针的一种改进型,它是在指南针上加装一个指针,使其更容易读取。
罗盘的引入为航海和探险提供了更准确和方便的导航工具。
2.2 罗盘的改进随着时间的推移,人们对罗盘进行了一系列的改进。
他们发现通过将磁针浸泡在液体中,可以减小摩擦力,提高指针的灵敏度。
此外,他们还将指针制作成一个平衡的磁针,使其能够平稳地指向北方。
2.3 罗盘的应用扩展罗盘的应用逐渐扩展到军事、航海、地理勘测等领域。
它为人类的探索和发现提供了重要的工具,使得航海和地理学得以迅速发展。
三、现代磁罗盘的出现3.1 磁罗盘的原理现代磁罗盘是在罗盘的基础上进行进一步改进的产物。
它利用了磁场的原理,通过传感器感知地球的磁场,并将其转化为指示方向的数据。
3.2 磁罗盘的精确性相比于古代的指南针和罗盘,现代磁罗盘具有更高的精确性和稳定性。
它能够准确地指示方向,并且不受外部干扰的影响。
3.3 磁罗盘的应用领域现代磁罗盘广泛应用于航空、航海、地质勘探、军事等领域。
它为这些领域的专业人士提供了重要的导航工具,使得他们能够更加准确地确定方向。
电子行业电子指南针

电子行业电子指南针引言在电子行业中,指南针是一种常用的工具。
它可以用来确定方向,帮助电子工程师在项目开发过程中准确定位和导航。
本文将介绍电子行业中常见的电子指南针技术和应用,以及如何选择和使用电子指南针。
一、电子指南针技术及原理1.1 磁传感器技术电子指南针使用磁传感器来测量磁场,并根据磁场方向确定方位。
常见的磁传感器技术包括:•Hall效应传感器:利用晶体管内的Hall 效应,测量垂直于电流和磁场的电压。
•磁阻传感器:利用磁阻效应,测量磁场作用下的电阻变化。
•互感感应传感器:利用互感感应原理,测量磁场对线圈的感应电动势。
这些传感器可以将磁场的强度和方向转化为可用的电信号。
1.2 校正算法电子指南针的准确性受到多种因素的影响,例如外部磁场干扰、温度变化和电子指南针的安装位置等。
因此,电子指南针通常需要进行校正来提高精度。
常见的校正算法包括:•阈值校正:根据磁场的强度,设定一个阈值来判断指南针方向。
•硬铁校正:通过在特定位置放置硬铁,调整磁场以达到理想的校正效果。
•地磁校正:根据地磁场的数据进行校正,以适应各个地理位置。
二、电子指南针应用2.1 汽车导航系统在汽车导航系统中,电子指南针可以用来确定车辆的方向,从而提供准确的导航指引。
通过电子指南针技术,汽车导航系统可以自动调整地图的方向,并提供最佳的路线规划。
2.2 移动设备现代移动设备如智能手机和平板电脑通常都配备了电子指南针功能。
这使得用户可以使用导航应用程序进行定位和导航,无需依赖卫星信号。
2.3 航海和航空电子指南针在航海和航空领域中也扮演着重要的角色。
它们可以帮助船舶和飞机保持正确的航向,从而确保安全和准确的导航。
三、选择和使用电子指南针3.1 选择电子指南针在选择电子指南针时,需要考虑以下因素:•精度:不同的电子指南针具有不同的精度水平,根据具体应用需求选择。
•稳定性:电子指南针的稳定性对准确导航非常重要。
•外部干扰:一些电子指南针对外部磁场干扰的抵抗能力更强。
电子指南针
电子指南针
简介
电子指南针是一种利用电子技术实现的指南针,它可以帮助人们确定方向。
与
传统磁性指南针相比,电子指南针更为精准、便携,广泛应用于航海、野外探险、户外旅行等领域。
工作原理
电子指南针内部通常包含磁力传感器、加速度传感器、处理器及显示屏等组件。
磁力传感器用于检测地球的磁场方向,加速度传感器用于确定设备的姿势,处理器计算并显示指南针指向的方向。
优势与劣势
优势
1.精准度高:电子指南针不受外部磁场干扰,指向更为准确。
2.多功能性:部分电子指南针还能显示高度、气压等信息,提供更全面
的导航功能。
3.易携带:电子指南针体积小巧,便于携带。
4.能够记录轨迹:一些电子指南针具有记录轨迹的功能,便于回顾行程。
劣势
1.依赖电池:电子指南针需要电池供电,长时间使用需要注意电量。
2.价格较高:相较于普通磁性指南针,电子指南针价格较高。
3.对技术要求高:使用电子指南针需要一定的技术基础,不太适合初学
者使用。
应用场景
1.登山探险:在登山、徒步等活动中,电子指南针可帮助人们确定方向,
避免迷失。
2.旅行导航:旅行时使用电子指南针可以更方便地找到目的地。
3.军事用途:在军事侦察、作战中,电子指南针是重要的导航设备。
结语
电子指南针凭借其精确的定位、便捷的携带和多功能性,在现代生活中扮演着
重要的导航角色。
随着科技的不断发展,电子指南针必将进一步完善,为人们的出行提供更好的服务。
基于单片机的电子指南针设计讲解
基于单片机的电子指南针设计讲解引言电子指南针是一种用于导航或测量方向的仪器,它能够指示地球表面的磁北方向。
传统的指南针使用磁针和标度盘来指示方向,而电子指南针则是利用电子元件和算法来实现同样的功能。
本文将详细介绍基于单片机的电子指南针的设计原理和实现方法。
一、设计原理1.磁场传感器基于单片机的电子指南针需要使用磁场传感器来检测地球的磁场以确定方向。
常用的磁场传感器有磁敏电阻(Magnetic Resistance, MR)传感器和磁传感器(Hall Effect Sensor)。
磁敏电阻通过磁场的变化产生电阻值的变化,而磁传感器则是通过磁场对半导体材料电阻产生影响来实现磁场的测量。
2.单片机单片机是电子指南针的核心控制器,它负责磁场传感器数据的采集和处理,计算出指南针所指的方向。
常用的单片机有Atmel AVR系列和Microchip PIC系列等。
3.算法在磁场传感器测量到地球的磁场之后,需要通过算法将测量到的磁场转化为实际的方向。
常用的算法有磁力计校正算法和方位角计算算法等。
磁力计校正算法用于校正磁场传感器的非线性误差,而方位角计算算法用于将磁场数据转化为具体的方向。
二、设计步骤1.硬件设计硬件设计是电子指南针设计的基础,包括磁场传感器的选型和电路的设计。
首先需要选择适合的磁场传感器,根据系统的需求选择MR传感器或磁传感器,并连接到单片机的输入引脚。
然后根据单片机的引脚和电源需求设计电路,为单片机提供稳定的电压和电流。
2.软件开发软件开发是电子指南针设计的关键步骤,包括单片机的编程和算法的实现。
首先需要编写单片机的驱动程序,用于配置和读取磁场传感器的数据。
然后编写磁力计校正算法,校正磁场传感器的非线性误差。
最后编写方位角计算算法,将磁场数据转化为实际的方向。
3.调试和测试在完成硬件设计和软件开发之后,需要进行调试和测试来验证电子指南针的性能。
首先需要使用磁铁等外部磁场源来检测磁场传感器的灵敏度和稳定性。
电子指南针

电子指南针电子指南针是一种利用磁力传感器技术设计的电子设备,可以指示地球磁场的方向,从而确定地理方向。
电子指南针作为现代导航仪器的基础之一,应用范围非常广泛,包括航海、探险、军事、航空、汽车导航等等。
工作原理电子指南针一般由三个部分组成,包括传感器、微处理器和显示器。
传感器是电子指南针的核心部分,它包含了许多微小的磁力计,可以检测出地球磁场的方向,并将其转化成电信号传送给微处理器。
微处理器会对收到的信号进行处理和计算,从而确定设备朝向的方向,并将结果显示在显示器上。
优点相比于传统的机械指南针,电子指南针具备以下优点:1.自动校准:传统的机械指南针需要手动校准以消除偏差,而电子指南针可以自动检测磁场变化,进行校准。
2.精度高:传统机械指南针的精度受到磁铁、铁矿石等物体的影响,而电子指南针可以准确测量地球磁场的方向,精度更高。
3.方便使用:电子指南针体积小、重量轻,易于携带,使用方便。
应用电子指南针的应用非常广泛,以下是一些典型应用:航海在航海领域,电子指南针是必不可少的导航工具。
电子指南针可以通过全球定位系统(GPS)和电子海图等信息,帮助水手准确地判定自己的方位和位置。
此外,电子指南针还可以在恶劣气候和光线不足的环境下,为船舶提供可靠的航向指引。
探险电子指南针还广泛应用于探险、露营等活动中。
在野外探险中,一张精确的地图和一台电子指南针可以帮助你确定自己的方位和位置,找到正确的道路和目的地,避免迷路和危险。
军事电子指南针在军事领域也得到广泛应用。
军队通常需要在恶劣的天气和光线条件下行动,所以电子指南针可以帮助士兵确定自己的方向和位置,避免在战场上迷路。
航空在航空领域,电子指南针也是一项重要的导航工具。
电子指南针可以帮助飞行员确定自己的方向和高度,确保飞机在正确的航线上飞行。
结语电子指南针作为现代导航仪器的重要组成部分,具有方便使用、高精度等优点,应用领域十分广泛。
未来,随着技术的不断发展,电子指南针的性能和应用将更加丰富和多样化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子指南针
概述
指南针是一种重要的导航工具,可应用在多种场合中。
电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。
并以精度高、稳定性好等特点得到了广泛运用。
公司生产的半导体器件KMZ52是一种专门用于电子指南针的二维磁场传感器。
它采用磁场传感器的磁阻(MR)技术,并用翻转技术消除信号偏移,而用电磁反馈技术来消除温度的敏感漂移。
由于外界存在干扰,该系统集成了几种特殊的抗干扰技术来提高系统精度。
本文介绍了电子指南针的工作原理及电路设计,同时给出了其抗干扰设计以及信号和数据的处理方法。
编辑本段工作原理与总体方案
Z1和Z4为翻转线圈,Z2和Z3为补偿线圈。
由于环境温度可能会影响系统精度,因此,在高精度系统中,可以通过补偿线圈对其进行补偿。
内部有两个正交的磁场传感器? 分别对应二维平面的X轴和Y轴。
磁场传感器的原理是利用磁阻(MR)组成磁式结构,这样可改变电磁物质在外部磁场中的电阻系数。
以便在磁场传感器的翻转线圈Z1和Z2上加载翻转电信号后使之能够产生变化的磁场。
由于该变化磁场会造成磁阻变化(ΔR)0并将其转化成变化的差动电压输出,这样,就能根据磁场大小正比于输出差动电压的原理,分别读取对应的两轴信号,然后再进行处理计算即可得到偏转角度。
整个电子指南针系统主要由传感器单元、信号调整单元(SCU)、方向确定单元(DDU)和显示单元四部分组成。
电子指南针的总体设计框图如图2所示。
图中,磁场传感器KMZ52用于将地磁场信号转化成电信号输出,信号调整单元用于将磁场传感器单元中的输出信号成比例放大,并将其转换成合适的信号hex和hey,同时消除信号的偏移。
对于保证系统的精度来说,SCU是最重要的部件。
通过DDU可将信号调整单元输出的两路信号hex和hey进行放大,然后再按下式计算出偏转角度α:α=arctan?hey/hex这样根据抗干扰技术算法对α进行处理就可得出该磁场的偏转角度,最后通过显示单元进行输出。
编辑本段硬件设计
内部桥式结构的磁阻输出是差动电压,通过运算放大器可以成比例放大,因此,在测量地磁场信号时,为了将两个磁场传感器信号放大同样的倍数,可以将二者的翻转线圈串联,并对差动电压选用同样的运放结构。
翻转信号从①口输入,X、Y轴差动电压信号则分别从②、③口输出。
然后通过处理系统对传来的信号进行A/D采样、数值处理和校正后,即可得到所求的角度。
编辑本段数值处理
由于KMZ52的输出信号很微弱,故信号干扰较大。
在输出幅值很小的位置上,通常有300mV左右且变化很大的干扰;而在输出幅值时则近似保持恒值。
两路信号幅值与角度的关系如图4所示。
为使二者的比值接近tanα?0<α<90°的变化,可以在幅值较大且数值变化较小的角度范围内,使幅值保持基本不变;而在幅值较小且数值变化较大的角度范围内,用一个函数改变其幅值变化曲线。
具体实现时,可按照一定角度对曲线进行分段,并对各段用一次函数y=ax+b去拟合。
这样,就可以使幅值变化曲线接近tanα。
角度划分越细,精度越高。
磁场传感器KMZ52的精度为3°,若按15°划分,可将精度提高到1°。
若按5°对其划分,精度可高达0.3°。
如划分更细,精度还可进一步提高。
若采用高阶函数去拟合,也可以提高精度。
实际上,在精度要求不高的情况下,通常以15°划分就可以达到要求。
编辑本段干扰校正
有时候,某些外来磁场叠加会产生一个恒定磁场,这个磁场对系统指示将造成影响。
故可采用如下方法对其进行校正:让整个系统在水平面上旋转一周,干涉磁场与地球磁场叠加会有一个最大值Vmax和一个最小值Vmin,记录下这两个值和达到最大值(或最小值)的角度φ,再经过校正,即可消除磁场的影响。
设地球磁场的大小为Vear,干扰磁场的大小为Vdis?则有:Vear=(Vmax+Vmin)/2?Vdis=(Vmax-Vmin)/2?这样,由正弦定理Vear/sin φ=Vdis/sinγ可求出γ。
然后在α上加上γ角即可消除干扰磁场的影响。
电子指南针- 概述
指南针是一个重要的导航工具,甚至在GPS中也会用到。
电子指南针将替代旧的针式指南针或罗盘指南针,因为电子指南针全采用固态的元件,还可以简单地和其他电子系统接口。
电子指南针- 详细信息
电子指南针系统中磁场传感器的磁阻(MR)技术是最佳的解决方法,和现在很多电子指南针还在使用的磁通量闸门传感器相比较,MR技术不需要绕线圈而且可以用IC生产过程(IC-like process)生产,是一个更值得使用的解决方案。
由于MR有高灵敏度,它甚至比这个应用范围中的霍尔元件更好。