stm32电子指南针
multisim单片机仿真stm3228个引脚
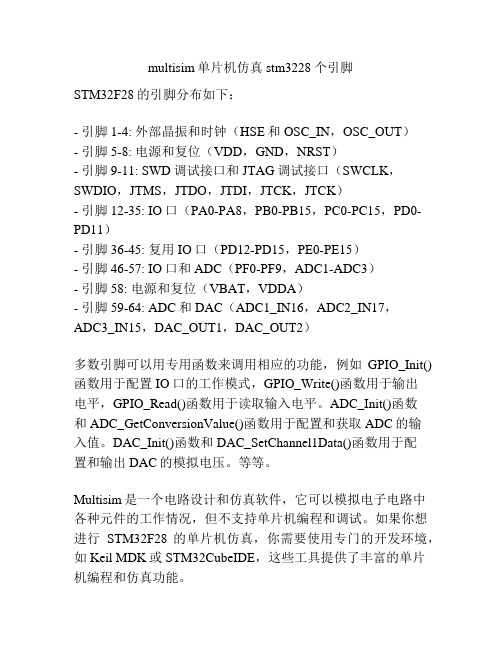
multisim单片机仿真stm3228个引脚STM32F28的引脚分布如下:- 引脚1-4: 外部晶振和时钟(HSE和OSC_IN,OSC_OUT)- 引脚5-8: 电源和复位(VDD,GND,NRST)- 引脚9-11: SWD调试接口和JTAG调试接口(SWCLK,SWDIO,JTMS,JTDO,JTDI,JTCK,JTCK)- 引脚12-35: IO口(PA0-PA8,PB0-PB15,PC0-PC15,PD0-PD11)- 引脚36-45: 复用IO口(PD12-PD15,PE0-PE15)- 引脚46-57: IO口和ADC(PF0-PF9,ADC1-ADC3)- 引脚58: 电源和复位(VBAT,VDDA)- 引脚59-64: ADC和DAC(ADC1_IN16,ADC2_IN17,ADC3_IN15,DAC_OUT1,DAC_OUT2)多数引脚可以用专用函数来调用相应的功能,例如GPIO_Init()函数用于配置IO口的工作模式,GPIO_Write()函数用于输出电平,GPIO_Read()函数用于读取输入电平。
ADC_Init()函数和ADC_GetConversionValue()函数用于配置和获取ADC的输入值。
DAC_Init()函数和DAC_SetChannel1Data()函数用于配置和输出DAC的模拟电压。
等等。
Multisim是一个电路设计和仿真软件,它可以模拟电子电路中各种元件的工作情况,但不支持单片机编程和调试。
如果你想进行STM32F28的单片机仿真,你需要使用专门的开发环境,如Keil MDK或STM32CubeIDE,这些工具提供了丰富的单片机编程和仿真功能。
基于STM32F407的智能配送小车
基于 STM32F407的智能配送小车摘要:本小车利用QMC5883L电子罗盘模块实时获取行进角度,对比初始方位角,通过微调保持小车的行进方向与配送路径航向基本一致,避免偏航。
利用SIM900A短信模块和LD3320D语音模块等无线通信技术,当物品到达目的地后,系统自动向收货人发送短信,告知物品送达。
本小车的设计打造出一种新的更加安全,可靠的配送方式,避免了交叉感染的风险,增加了配送效率。
关键词:智能小车;GPS定位;图像识别;无线通信一、引言近年来,随着现代化技术的发展,人们生活的便捷化和智能化,人们对于生活物质服务的要求也越来越高。
对于物件快递的配送,外卖的送达等服务的要求也日益剧增。
随着配送行业的不断发展,纯人工配送已经无法满足现实的需求了,并且由于新冠疫情的不断蔓延,来自隔离社区或医院的刚需市场的拉动,无人配送技术已经可以应用到医学领域,小物件配送、外卖配送等领域,实现零接触运输。
二、基于STM32F407ZET6的智能配送小车1.总体设计方案选择了STM32F407ZET6作为主控芯片,功能强大、集成度高,首先实现了一些基本的功能,小车根据上位机的控制指令通过控制直流电机、LD3320、SIM900A等模块完成前后左右运动、加减速、语音控制、短信发送,其次是电子罗盘的实现,采用 QMC588具有高分辨的磁阻传感器,使小车行驶过程中进行精度微调,再者就是GPS定位导航功能的实现,搭配相应的外围模块,实现小车位置信息的采集,并反馈给上位机,以便对其进行准确的定位和跟踪,此外,接受上位机发送的路径信息,与自身的位置坐标对比后,确定小车的行驶方向和路径,在避障系统的辅助下,控制小车行驶到预先约定的位置,最后的是摄像头OV2640的实现,主要是对路况进行颜色识别。
2.硬件设计STM32F407ZET6是本次设计的控制核心板,其次主要分为SIM900A短信测试模块、语音测试模块、4WD-L298P电机模块、HC-SR04超声波模块、QMC5883L电子罗盘、GPS_ATGM332D定位导航、OV2640图像识别等主要模块。
四旋翼无人机毕业设计
四旋翼无人机毕业设计编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(四旋翼无人机毕业设计)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为四旋翼无人机毕业设计的全部内容。
渤海大学本科毕业论文(设计)四旋翼无人机设计与制作The Manufacture and Design of Quad Rotor UnmannedAerial Vehicle学院(系):专业:学号:学生姓名:入学年度:指导教师:完成日期:摘要四旋翼无人机飞行器因为它的结构简单,而且控制起来也很方便,因此它成为了近几年来发展起来的热门产业。
在这里本文详细的介绍了四旋翼飞行器的设计和制作的过程,其中包括了四旋翼无人机飞行器的飞行原理,硬件的介绍和选型,姿态参考算法的推导和实现,系统软件的具体实现。
该四旋翼飞行器控制系统以STM32f103zet单片机为核心,根据各个传感器的特点,采用不同的校正方法对各个传感器数据进行校正以及低通数字滤波处理,之后设计了互补滤波器对姿态进行最优估计,实现精确的姿态测量。
最后结合GPS控制与姿态控制叠加进行PID控制四旋翼飞行器的四个电机,来达到实现各种飞行动作的目的。
在制作四旋翼飞行器的过程中,进行了大量的调试并且与现有优秀算法做对比验证,最终设计出能够稳定飞行的四旋翼无人机飞行器。
关键词:姿态传感器;四元数姿态解算; STM32微型处理器;数据融合;PIDThe Manufacture and Design of Quad Rotor Unmanned AerialVehicleAbstractQuad—rotor unmanned aerial vehicle aircraft have a simple structure,and it is very easy to control, so it has become popular in recent years. Here article describes in detail the design and the process of making the four—rotor aircraft,including Quad-rotor UAV aircraft flight principle,hardware introduction and selection,implementation and realization of derivation attitude reference algorithm,the system software 。
stm32f407zgt6中文资料_数据手册_参数
其中,高速时钟(HSE和HSI)提供给芯片主体的主时钟.低速时钟(LSE和LSI)只是提供给芯片中的RTC(实时时钟)及独立看门狗使用,图中可以看出高速时钟也可以提供给 RTC。内部时钟是在芯片内部RC振荡器产生的,起振较快,所以时钟在芯片刚上电的时候,默认使用内部高速时钟。而外部时钟信号是由外部的晶振输入的,在精度 和稳定性上都有很大优势,所以上电之后我们再通过软件配置,转而采用外部时钟信号. 高速外部时钟(HSE):以外部晶振作时钟源,Байду номын сангаас振频率可取范围为4~16MHz,我们一般采用8MHz的晶振。 OSC_OUT和OSC_IN开始,这两个引脚分别接到外部晶振8MHz,第一个分频器PLLXTPRE,遇到开关PLLSRC(PLL entry clock source),我们可以选择其输出,输出为外部 高速时钟(HSE)或是内部高速时钟(HSI)。这里选择输出为HSE,接着遇到锁相环PLL,具有倍频作用,在这里我们可以输入倍频因子PLLMUL,要是想超频,就得在这 个寄存器上做手脚啦。经过PLL的时钟称为PLLCLK。倍频因子我们设定为9倍频,也就是说,经过PLL之后,我们的时钟从原来8MHz的 HSE变为72MHz的 PLLCLK。STM32F407ZGT6紧接着又遇到了一个开关SW,经过这个开关之后就是STM32的系统时钟(SYSCLK)了。STM32F407ZGT6通过这个开关,可以切换SYSCLK的 时钟源,可以选择为HSI、PLLCLK、HSE。我们选择为PLLCLK时钟,所以SYSCLK就为72MHz了。PLLCLK在输入到SW前,还流向了USB预分频器,这个分频器输出为 USB外设的时钟(USBCLK)。回到SYSCLK,SYSCLK经过AHB预分频器,分频后再输入到其它外设。如输出到称为HCLK、FCLK的时钟,还直接输出到SDIO外设的 SDIOCLK时钟、存储器控制器FSMC的FSMCCLK时钟,和作为APB1、APB2的预分频器的输入端。GPIO外设是挂载在APB2总线上的, APB2的时钟是APB2预分频器的 输出,而APB2预分频器的时钟来源是AHB预分频器。因此,把APB2预分频器设置为不分频,那么我们就可以得到GPIO外设的时钟也等于HCLK,为72MHz了。 SYSCLK:系统时钟,STM32大部分器件的时钟来源。主要由AHB预分频器分配到各个部件。 HCLK:由AHB预分频器直接输出得到,它是高速总线AHB的时钟信号,STM32F407ZGT6提供给存储器,DMA及cortex内核,是cortex内核运行的时钟,cpu主频就是这 个信号,它的大小与STM32运算速度,数据存取速度密切相关。 FCLK:同样由AHB预分频器输出得到,是内核的“自由运行时钟”。“自由”表现在它不来自时钟 HCLK,因此在HCLK时钟停止时 FCLK 也继续运 行。STM32F407ZGT6它的存在,可以保证在处理器休眠时,也能够采样和到中断和跟踪休眠事件 ,它与HCLK互相同步。 PCLK1:外设时钟,由APB1预分频器输出得到,大频率为36MHz,提供给挂载在APB1总线上的外设,APB1总线上的外设如下:
基于STM32微处理器及GPS的智能导盲手杖的设计
基于STM32微处理器及GPS的智能导盲手杖的设计智能导盲手杖是一种利用现代技术,在导盲人士行走时提供导航和避障功能的设备。
本文将介绍基于STM32微处理器及GPS的智能导盲手杖的设计。
首先,我们选择了STM32微处理器作为智能导盲手杖的核心控制单元。
STM32微处理器具有高性能、低功耗和丰富的外设接口等特点,非常适合用于本项目。
接下来,我们将在智能导盲手杖上加入一个GPS模块。
GPS模块能够接收卫星信号并计算出当前位置的经度和纬度信息。
这样就可以通过导航算法,将导航指令传达给导盲人士。
导盲人士只需按照手杖上的指示前进,就能够准确地到达目的地。
除了GPS模块,我们还会加入一些其他的传感器来完善智能导盲手杖的功能。
例如,我们可以加入超声波模块来检测前方障碍物的距离,并在手杖上加入蜂鸣器和振动器来提醒导盲人士。
当手杖接近障碍物时,蜂鸣器会发出警报声,而振动器则会震动,提醒导盲人士注意。
此外,我们还可以加入一个声纳传感器,用于检测周围环境的声音和声源的方位。
这样可以帮助导盲人士更好地感知周围环境,进一步提高行走安全性。
为了提供更好的用户体验,我们还会在手杖上添加一个触摸屏显示模块。
通过触摸屏,导盲人士可以方便地调节手杖的设置,例如导航目的地、语音提示频率等。
最后,为了确保智能导盲手杖的稳定性和耐用性,我们设计了一个简洁而坚固的手柄结构。
手柄采用防滑材质,能够确保导盲人士在使用手杖时的牢固握持。
手杖的主体部分则由耐用的材料制成,能够经受住日常使用中的冲击和摩擦。
总结起来,基于STM32微处理器及GPS的智能导盲手杖设计是一种依托现代技术实现导航和避障的设备。
通过使用GPS模块、超声波传感器、声纳传感器和触摸屏等多种技术和传感器,能够提供准确的导航功能和周围环境感知能力,帮助导盲人士安全、便捷地出行。
此外,坚固而简洁的手柄结构也能够提供稳定的使用体验。
足球机器人
X系列机器人技术训练丛书15版电教足球机器人技术手册上海彼林电子科技有限公司----------------------------------------------------------------------------------------------------------------------目录第一部分硬件原理与功能1.1机器人整体介绍 (2)1.2控制板介绍 (3)1.3各个传感器介绍 (5)1.4电机/轮子介绍 (11)1.5电池/充电器介绍 (12)第二部分软件功能介绍与使用方法2.1 软件特点/功能介绍 (14)2.2 软件安装/型号选择、注意事项 (15)2.3 驱动安装 (17)2.4 操作方法 (18)2.5 程序编程下载 (20)第三部分项目编程3.1 正方形 (21)3.2 前进到离墙20cm停 (24)3.3 前进到离墙20cm太近后退 (26)3.4 追光 (28)3.5 追光离球近时撞下球停 (30)第四部分硬件拆装4.1 连接端口查询表 (32)4.2 整体拆装 (33)第五部分实战训练5.1 传感器数据采样/分析/修改 (35)5.2 机器人操作方法/注意事项 (36)第一部分 硬件原理与功能1.1 足球机器人整体介绍1、竞赛电机Ⅳ_K1:机器人重要的驱动装置,通过电机转动带动轮子的滚动,实现机器人的移动,既可以前进后退,又可以左转右转。
2、竞赛电机50型:耐磨材料制成,抓地力强。
3、9v 锂电池(3495):机器人的能源,给机器人供电。
4、红外调制复眼传感器:用于检测红外调制球的传感器。
5、X350Z 控制器:机器人核心部分,它通过连接各种传感器获得各种信息,进行分析处理,发出指令以控制机器人的各种运动行为。
该传感器和大功率电机驱动卡合为一体,有效的减少了安装空间,降低机器人的重心。
6、红外测距传感器:机器人测量物体距离远近的专业传感器,检测距离为5~80cm ,检测精度为±1cm 。
创科之龙
创科之龙创科之龙是目前最热、最专业嵌入式培训服务的机构。
主要从事于嵌入式培训属于高端IT培训(android驱动开发、MTK平台、高通平台)android驱动开发以及系统开发。
【创科之龙】团队具备丰富的嵌入式项目实战开发能力的团队,同时也具备课程研发团队和授课师资团队。
目录1创科之龙简介2师资团队简介3金牌讲师:Aiku4培训项目课程成果5创科之龙项目培训实战成果1创科之龙简介创科之龙是目前最热、最专业嵌入式培训服务的机构。
主要从事于嵌入式培训属于高端IT培训(全志平台、MTK平台、高通平台)android下linux驱动开发以及android系统开发。
【创科之龙】团队具备丰富的嵌入式项目实战开发能力的团队,具有非常强的实践性团队,同时也具备课程研发团队和授课师资团队。
2师资团队简介该团队具有非常强的实践性团队,同时也具备课程研发团队和授课师资团队。
3金牌讲师:Aiku【创科之龙的实战项目】金牌讲师:Aiku——资深嵌入式Android高级驱动工程师嵌入式研发具有非常强的实践性,因此实战项目在创科之龙培训机构的课程体系中占据非常大的比重。
【创科之龙】培训课程:——【独家+原创+在线YY网络教程】【嵌入式入门开发以及实战项目开发】【零死角玩转MTK手机驱动开发】该课程深受广大读者以及嵌入式初学者欢迎。
aiku致力打造讲实操、讲案例、讲项目,自己动手才是王道!!每个模块动手实操,不懂就问,不会就学!!给你带来不一样的学习体验,学会为止4培训项目课程成果培训项目课程成果:第一期【嵌入式入门及项目实战项目】yy课堂培训实战项目!实战项目1【电子数码相册系统设计】实战项目2【嵌入式智能菜棚温控系统设计】实战项目3【嵌入式智能交通灯模拟系统设计】实战项目4【嵌入式移动物体检测系统设计】5创科之龙项目培训实战成果【创科之龙】项目分享内容:一.嵌入式无线网络智能化家电产品试验系统项目二.嵌入式μ/COS-II下的智能温度测控仪三基于ARM Linux环境下嵌入式网络图像视频采集环境监控系统四舞台灯具可靠性试验系统嵌入式测控节点五网络视频监控项目六mini2440+TD035STED4实现类似手写板功能七mini2440制作的无线视频小车八STC12C5A60S2+VS1003B模块+SD卡模块把MP3做出来啦九.伟纳杯比赛-一等奖作品十DIY简易数码照相机(有图有源码)十一.医学图像系统(只支持隐式大部分的CT,DR,CR)十二STM32F103VBT6超屏解决OV7660高速数据同步读取十三.DIY的wav播放器(有图有源码)十四.DIY的STM32驱动OV7660摄像头成功十五.AVR作实用的电源设备作品,(有图有源码)十六.基于ARM LINUX的网络监控系统(有图有源码)十七.基于KMZ52磁场传感器电子指南针设计与制作十八.愚作——基于ARM和CPLD的图像系统(完全开源)十九.基于ARM7的手持式导航仪(附件源程序和GPS手册)二十.ARM(S3C2440)上运行的MP3二十一重磅资料:无线报警主机PCB+SCH+源代码二十二重量级资料,KEELOQ(滚动码)无线传输加解密协议及源代码,有详细加解密说明二十三射频卡电控锁做好了,原理图+程序二十四手把手教你做GPS导航仪(友善天嵌等2440241024166410)二十五车载定位系统,经纬度用google map地图显示二十六强悍的智能寻迹小车的研究与开发(详细文档+源码+原理图)二十七基于mini2440的SD卡MP3播放器系统(详细文档+源码+原理图)二十八基于mini2440的WEB远程视频实时监控系统(详细文档+源码+原理图)二十九基于网络控制mini2440开发板GPIO资源(详细文档+源码+原理图)三十基于无线网络的机器人安防项目(视频+文档)三十一基于ARM9的便携式可见光分光光度计的设计及频谱分析三十二基于ARM9的人员出入拍照系统设计与实现(详细文档+源码+原理图)三十三嵌入式电气火灾监控设备—数据存储单元设计三十四嵌入式VOD系统的设计与实现(详细文档+源码+原理图+实物截图和视频演示)三十五ARM音频采集项目三十六基于ARM处理器的MP4的分析与实现(详细文档+源码+原理图+实物截图和视频演示)三十七基于linux的图书信息管理系统的设计与实现(详细文档+源码+原理图+实物截图和视频演示)三十八基于mini2440p35做的数码相框和MP4(详细文档+源码+原理图+实物截图和视频演示)三十九校史馆二维条码的应用研究(详细文档+源码+原理图+实仿真截图和视频演示)四十基于嵌入式笔记本电脑的智能底座设计(详细文档+源码+原理图+实物截图和视频演示)四十一基于嵌入式和QT界面mini2440花卉养殖智能灌水系统(详细文档+源码+原理图+实物截图和视频演示)四十二基于ARM的智能家居远程监控系统设计(详细文档+源码+原理图+实物截图和视频演示)四十三基于ARM智能点餐终端的设计与实现(详细文档+源码+原理图+实物截图和视频演示)四十四基于DSP模糊PID恒温培养箱温度控制系统的研究(详细文档+源码+原理图+实物截图和视频演示)四十五基于mini2440的usb视频采集系统的设计(详细文档+源码+原理图+实物截图和视频演示)四十六基于mini2440下Javascript游戏机操作显示(详细文档+源码+原理图+实物截图和视频演示)四十七基于mini2440下嵌入式MP3实战项目开发(详细文档+源码+原理图+实物截图和视频演示)四十八基于OK6410视频监控报警系统设计(详细文档+源码+原理图+实物截图和视频演示)四十九基于QT的多功能数码相框【数码相框和MP4】(详细文档+源码+原理图+实物截图和视频演示)五十一基于ucosii的电梯模拟系统设计(详细文档+源码+原理图+实物截图和视频演示)五十二基于无线传感器网络的智能抄表通信系统设计(详细文档+源码+原理图)五十三家居智能无线火警报警系统(详细文档+源码+原理图+实物截图和视频演示)五十四基于嵌入式linux和Qt数码相框设计(详细文档+源码+原理图+实物截图和视频演示)五十五基于嵌入式linux快递单号查询系统设计(详细文档+源码+原理图+实物截图和视频演示)五十六基于嵌入式linux花卉大棚温湿度监测与调节系统的设计与实现(详细文档+源码+原理图+实物截图和视频演示)五十七智能教室灯光控制系统的设计(详细文档+源码+原理图+实物截图和视频演示)五十八嵌入式系统的模拟量输入程序设计(详细文档+源码+原理图+实物截图和视频演示)五十九太阳能驱动的LED照明系统主电路设计(详细文档+源码+原理图+实物截图和视频演示)六十一一种基于嵌入式linux和Qt无线投票表决系统(详细文档+源码+原理图+实物截图和视频演示)六十二基于嵌入式linux下usb视频监控和物体移动监测(详细文档+源码+原理图+实物截图和视频演示)六十三基于ARM9的四旋翼飞行器控制平台的硬件设计(详细文档+源码+原理图+实物截图和视频演示)六十四基于mini2440x35的智能仓储系统(详细文档+源码+原理图+实物截图和视频演示)六十五基于mini2440开发板无线家电控制设计和实现(详细文档+源码+原理图+实物截图和视频演示)。
基于单片机的电子指南针设计毕业论文 最新完整版
题目基于单片机的电子指南针设计学生姓名学号所在学院专业班级指导教师完成地点2017 年6月3日毕业论文﹙设计﹚任务书院(系) 物理与电信工程学院专业班级通信1103班学生姓名王婷婷一、毕业论文﹙设计﹚题目基于单片机的电子指南针设计二、毕业论文﹙设计﹚工作自止三、毕业论文﹙设计﹚进行地点: 物理与电信工程学院实验室四、毕业论文﹙设计﹚的内容要求:指南针是一种重要的导航工具,可应用在多种场合中。
电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。
并以精度高、稳定性好等特点得到了广泛运用。
本课题具体要求如下:1. 熟悉指南针的工作原理;2. 选择合适的电磁感应器进行系统设计,完成显示功能;3. 能够利用电池对系统供电,系统集成,完成功能调试。
成果形式:实验样机一套。
毕业设计进度安排: 1.10─3.20:查阅资料(参考文献不少于10篇),进行方案论证,完成开题报告。
完成不少于3000字的外文翻译;3.20─4.30:设计硬件电路,编写相关软件、完成电路仿真及样机调试;5.1─5.20:完善系统调试,撰写论文,准备毕业设计验收等工作;5.21-6.10:整理资料,修改论文,准备毕业答辩。
指导教师系(教研室)通信教研室系(教研室)主任签名批准日期接受论文 (设计)任务开始执行日期学生签名基于单片机的电子指南针设计王婷婷(陕西理工学院物理与电信工程学院通信1103班,陕西汉中 723003)指导教师:郑争兵[摘要]指南针是用以判别方位的一种简单仪器,是一种重要的导航工具,可应用在多种场合中。
当人们置于一个陌生的环境中,导航定向非常重要,随着手机的普及,其内置指南针已被人们广泛应用,但是一旦出现手机无电以及信号不强时无法定位。
针对这一问题,因此开发一款基于单片机的低成本便于携带的电子指南针系统,以满足人们的精确定向。
此次设计的原理是通过STC89C52单片机处理异性磁阻(AMR)传感器芯片HMC5883L得到的信息数据,最终在LCD1602液晶上显示数据,得到当前的角度信息与方位信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1
通过以上测量分析思路所得传感器信号,经过STM32数据预处理和算法补偿后在上传到12864液晶屏上显示。结合以上各方案选择及设计思路可得出以下总体方案框图。
图2.2 总体方案设计框图
3.硬件设计
对于此次电路设计,我们采用的是老师给的STM32最小系统,外加显示模块,我们是采用12864LCD来显示;三轴加速度传感器模块我们采用的是GY—271传感器。由于板子上的高低电平引脚不够,我们自己外扩了引脚模块。
(2)第2-3天:资料查阅与方案制定
(3)第4-8天:硬件设计、程序编制与调试阶段
(4)第 9 天:撰写设计报告
(5)第 10 天:答辩与考核阶段
六、主要参考资料
[1]田泽.嵌入式系统开发与应用实验教程.北京航空航天工业大学出版社,2005.
[2]郭荣佐,王霖.《嵌入式系统原理》.北京航空航天大学出版社,.2008.
3.
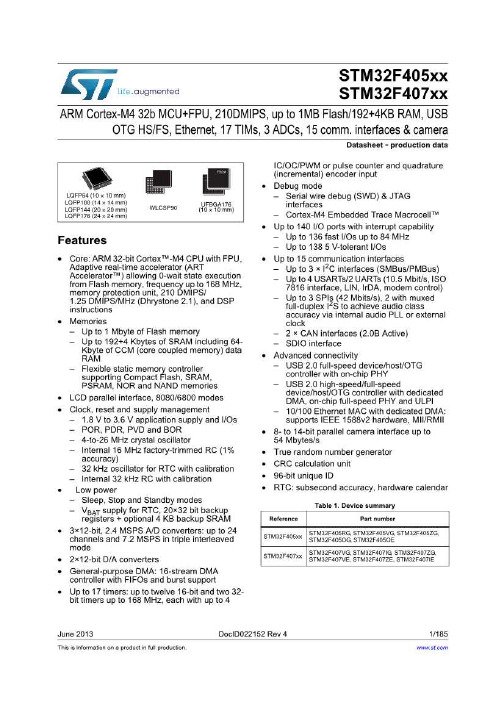
STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARMCortex-M3内核。按性能分成两个不同的系列:STM32F103“增强型”系列和STM32F101“基本型”系列。增强型系列时钟频率达到72MHz,是同类产品中性能最高的产品;基本型时钟频率为36MHz,以16位产品的价格得到比16位产品大幅提升的性能,是16位产品用户的最佳选择。两个系列都内置32K到128K的闪存,不同的是SRAM的最大容量和外设接口的组合。时钟频率72MHz时,从闪存执行代码,STM32功耗36mA,是32位市场上功耗最低的产品,相当于0.5mA/MHz。
(4)通过三轴加速度传感器检测到的偏差角度,再传送到ARM芯片处理,送到显示屏显示此时的方位。
(5)分析结果,独立撰写设计总结报告陈述自己的观点,格式应严格遵守学校规范。内容尽量翔实,其中必须要有自己独立的见解和认识。
三、原始资料
硬件资源:TFT的显示屏,STM32的实验板,GY271三轴加速度传感器,烧录线
《小型智能电子终端》
课程设计说明书
题目:电子指南针
院(系):信息科学与工程学院
专业班级:电子1102
学生姓名:王金辉
学号:20111185061
指导教师:徐琴
2014年6月9日至2014年6月25日
华中科技大学武昌分校制
小型智能电子终端课程设计任务书
一、设计题目
电子指南针
二、设计主要内容
(1)广泛查找文献资料,认真研究,反复论证,精心设计技术方案。
指导教师(签名):
20 年 月 日
1.前言
指南针是用以判别方位的一种简单仪器,是一种重要的导航工具,可应用在多种场合中。指南针的前身是中国古代四大发明之一的司南。主要组成部分是一根装在轴上可以自由转动的磁针。磁针在地磁场作用下能保持在磁子午线的切线方向上。磁针的北极指向地理的北极,利用这一性能可以辨别方向。常用于航海、大地测量等方面。
设计指导书:ARM系统板配套光盘
四、要求的设计成果
(1)在显示屏上显示具体方位。
(2)撰写课程设计说明书,要求简洁、通顺,格式规范,设计方案正确,实现技术路线明确,论述内容完整、清楚、规范,数据、资料真实可靠,软件程序运行良好。
(3)要求有完整的电路设计原理图及软件源代码。
五、进程安排
(1)第 1 天:任务布置及相关知识讲解
随着人们对指南针原理认识的不断深入,指南针也由先前笨重的“司南”发展到现在的便携式的指南针。但其基本构造是没有改变的,都是属于机械的指针式,其指示的机械结构基本上没有改变,都是利用某种支撑使得磁针能够受到地磁场的影响而自由的旋转。由于机械的先天因素导致了指针式指南针在便携性、灵敏度、精度以及使用寿命上都有一定的限制。由于国内外电子技术的飞速发展,特别是在磁传感器和专用芯片上的发展使能指南针的基本实现机理有了质的改变,不再是机械结构而采用了磁场传感器和专用处理器对磁场进行测量和处理后指示方向,这就是当前应用较为广泛的电子式指南针。
(2)严格遵守各项纪律,勤奋学习,认真思考,敢于挑战困难并勇于创新。
(3)较为深入的掌握ARM处理器的体系结构、指令系统、编程方法,初步了解ARM应用系统的软硬件开发方法及手段,较熟练地掌握ARM处理器几种重要的片内外设(定时器、PLL、I2C、RTC等)的基本原理及编程方法,初步掌握ARM处理器外围电路的扩展方法。
电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。并以精度高、稳定性好等特点得到了广泛运用。本设计采用Honeywell公司的各向异性磁阻(AMR)传感器芯片HMC5883L。霍尼韦尔HMC5883L是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯片,HMC5883L包括最先进的高分辨率HMC118X系列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校准、能使指南针精度控制在1°~2°的12位模数转换器。简易的I2C系列总线接口。HMC5883L采用霍各向异性磁阻(AMR)技术,该技术领先于这些各向异性传感器具有在轴向高灵敏度和线性高精度的特点。传感器具有的对正交轴的低灵敏度的固相结构能用于测量地球磁场的方向和大小,其测量范围从负8高斯到 8 高斯(gauss)。本文介绍了电子指南针的工作原理及电路硬件及软件的设计,同时给出了其抗干扰设计以及信号和数据的处理方法。
[3]周根林.嵌入式系统原理与应用.南京大学出版社,2006.
[4]谭浩强.C语言程序设计(第2版).清华大学出版社,2008
[5]2007.
[6]游雨云.单片机PWM信号控制智能小车的实现方法.技术与市场, 2009,(12)
[7]袁新娜,余红英,超声波传感器在智能小车避障系统中的应用. 大众商务教育版(民办教育研究),2009,(8)
其参数与主要特点如下:1.参数:2V-3.6V供电, 容忍5V的I/O管脚, 优异的安全时钟模式, 带唤醒功能的低功耗模式, 内部RC振荡器 ,内嵌复位电路 ,工作温度范围:-40°C至+85°C或105°C。2.特点:(1)内核:ARM32位Cortex-M3 CPU,最高工作频率72MHz,1.25DMIPS/MHz。单周期乘法和硬件除法。(2)存储器:片上集成32-512KB的Flash存储器。6-64KB的SRAM存储器。(3)时钟、复位和电源管理:2.0-3.6V的电源供电和I/O接口的驱动电压。POR、PDR和可编程的电压探测器(PVD)。4-16MHz的晶振。内嵌出厂前调校的8MHz RC振荡电路。内部40 kHz的RC振荡电路。用于CPU时钟的PLL。带校准用于RTC的32kHz的晶振。(4)低功耗:3种低功耗模式:休眠,停止,待机模式。为RTC和备份寄存器供电的VBAT。(5)调试模式:串行调试(SWD)和JTAG接口。(6)DMA:12通道DMA控制器。支持的外设:定时器,ADC,DAC,SPI,IIC和UART。(7)2个12位的us级的A/D转换器(16通道):A/D测量范围:0-3.6 V。双采样和保持能力。片上集成一个温度传感器。(8)2通道12位D/A转换器:STM32F103xC,STM32F103xD,STM32F103xE独有。(9)最多高达112个的快速I/O端口:根据型号的不同,有26,37,51,80,和112的I/O端口,所有的端口都可以映射到16个外部中断向量。除了模拟输入,所有的都可以接受5V以内的输入。(10)最多多达11个定时器:4个16位定时器,每个定时器有4个IC/OC/PWM或者脉冲计数器。2个16位的6通道高级控制定时器:最多6个通道可用于PWM输出。2个看门狗定时器(独立看门狗和窗口看门狗)。Systick定时器:24位倒计数器。2个16位基本定时器用于驱动DAC。(11)最多多达13个通信接口:2个IIC接口(SMBus/PMBus)。5个USART接口(ISO7816接口,LIN,IrDA兼容,调试控制)。3个SPI接口(18 Mbit/s),两个和IIS复用。CAN接口(2.0B)。USB 2.0全速接口。SDIO接口。(12)ECOPACK封装:STM32F103xx系列微控制器采用ECOPACK封装形式。