韩国大宇挖掘机-Ⅲ 型 EPOS 系统
YJ YJS 系列单相、三相智能数字化EPS(资料)
YJ/YJS 系列单相、三相智能数字化EPS一、应用领域:YS、YJS系列单相三相混合通用型EPS,容量从1KVA到400KVA,该系列产品采用高速微处理器(MCU)和可编程逻辑器件(CPLD),经软件编程控制。
功率器件采用当今最先进的第六代低损耗大功率IGBT和静态开关。
该系列产品是集国际最新的控制器件和最先进的软件为一体的电源产品。
广泛应用于大楼照明、道路交通照明、电力、工矿企业、消防电梯(消防泵)等消防设备。
二、主要性能特点:◆ 智能数字化控制技术:采用三块高速微控制器和可编程逻辑器件来实现电路控制,参数设定、运行管理、先进的自检和自侦测功能,可对电路板上的所有独立电路连接进行自检和故障分析。
您可以充分信赖经过数码变换的正弦波电压,及完美运行的新方案:满足您的实际需要。
◆ 高效的IGBT(Insulated Gate Bipolar Transistor)逆变技术:采用第六代IGBT良好的高速开关特性;具有高电压和大电流的工作特性;采用电压型驱动,只需要很小的控制功率。
第六代IGBT具有更低的饱和压降,逆变器的工作效率更高,可靠性更高。
◆ 优越的负载特性:完全满足从0到100%负载的跃变,而无需切换到旁路,并保护输出稳定可靠,带电机负载时可设置为变频调压输出。
◆ 直观的LED状态指示:工作流程式状态指示,一目了然。
◆ 完善的保护功能:输入输出过欠压保护、输入浪涌保护、相序保护、电池过充过放保护、输出过载短路保护、温度过高保护等多种系统保护和报警功能。
◆ 高性能的动态特性:采用瞬时控制方式和有效值等多种反馈控制,既实现了高动态调节,减小输出电压失真度。
◆ 采用6脉波整流充电器,充电电流可从0-100A根据电池配置容量设置。
◆ 智能化的电池管理:智能电池充电:根据用户的电池配置自动调整电池的充电参数,并会根据供电环境对电池进行均充浮充转换、温度补偿充电,放电管理。
延长电池的使用寿命,减少管理员的负担;◆可选配电池巡检模块:可对单个的参数进行测量,并在显示板上显示出来。
液压挖掘机行走装置设计论文
目录1 绪论 (1)1.1 选题意义 (1)1.2 国内外研究现状 (2)1.3 研究内容及方法 (3)2 行走装置设计总体基本方案 (4)2.1行走装置设计原则 (4)2.2轮式液压挖掘机行走装置的结构形式 (4)2.3液压系统的设计 (6)2.4轮式行走装置的传动设计(液压机械传动) (10)2.5轮式行走装置的构造 (11)2.5.1悬挂装置选择 (11)2.5.2 转向机构 (12)2.5.3 转向方式 (13)3 整机传动系的设计 (15)3.1选择液压马达类型、行走速度及传动比 (15)3.2实际速度及牵引力 (16)3.3挖掘机行走装置参数 (16)3.4 变速箱设计 (17)3.4.1低速档齿轮设计 (17)1 材料选择 ..................................... 错误!未定义书签。
2 齿数确定 ..................................... 错误!未定义书签。
3 按齿面接触强度设计 ........................... 错误!未定义书签。
4 按齿根弯曲强度设计 ........................... 错误!未定义书签。
5 齿轮几何尺寸计算 ............................. 错误!未定义书签。
3.4.2高速档齿轮设计 (18)3.4.3齿轮变位 (19)3.5 轮边减速器 (21)3.5.1传动方案的选择 (21)3.5.2配齿选择 (21)3.5.3行星传动系设计 (22)主要参数确定. (22)4 其他部件设计 (23)4.1轴和轴承设计 (23)4.2轴承、键和连轴器的选择 (23)4.2.1输入轴 (23)4.2.2 输出轴 (24)5液压挖掘机行走装置运动仿真设计 (26)5.1模型的建立 (26)5.2构件运动配装 (26)5.2.1相似点 (26)5.2.2 不同点 (26)结论 (30)参考文献 (31)致谢 (32)1 绪论改革开放以来,我国的科学技术、信息技术迅猛发展,各行各业都发生了翻天覆地的变化,工程机械行业同样得到了相应的快速发展。
C L S S 节能控制系统
C L S S节能控制系统包海涛 严桃平内容摘要:本文综述了全液压挖掘机节能控制系统的类型和在小松挖掘机上的应用,着重介绍“闭式中心负荷传感”节能控制系统的结构和工作原理。
关键词:C LSS 节能 结构 工作原理 由于全液压挖掘机通用性强,操纵和挖掘轻便灵活,易于实现电液控制,因此全液压式单斗挖掘机得到广泛地应用。
初期的挖掘机多数采用定量泵和大功率柴油机,由液压阀控制,其后采用变量泵代替定量泵,柴油机的功率得到了有效利用,且不会导致柴油机熄火。
由于变量泵的流量通常是利用泵斜盘倾角控制机构内的弹簧力与泵的排油压力相平衡来加以控制,功率利用有了较大的改进。
但由于机械控制特性本身的影响以及仅仅控制了液压系统而未能控制发动机,使得总能量的利用率仅为20%左右。
而节能技术在挖掘机液压系统中的应用,使机器在满足各种控制功能的前提下,更能节省功率、提高效率,有更好的经济性、可靠性和先进性。
1 常见节能控制系统的类型节能控制系统的类型有多种,但不少系统的控制原理是基本相同的。
目前具有代表性的有以下三种:(1)C LSS系统(闭式中心负荷传感系统)该系统是在O LSS系统基础上发展起来的,其主要特点是做成闭合回路,操作阀在中位或调节操作时使无用流量达最小限度,从而减小功率损失。
目前在小松挖掘机上采用。
(2)C APO系统(电脑辅助动力选择系统)该系统为挖掘机设置了3~4种工作方式,每一种方式的设计与各自的转速及系统压力相匹配。
电子控制系统提供了最大的工作效率和最少的油耗,工作时根据工作环境选择功率方式。
目前在现代挖掘机上采用。
(3)EPOS系统(电子功率优化系统)该系统对发动机和液压系统进行综合控制,使二者达到最佳匹配,可以达到明显的节能效果,目前在大宇挖掘机上采用。
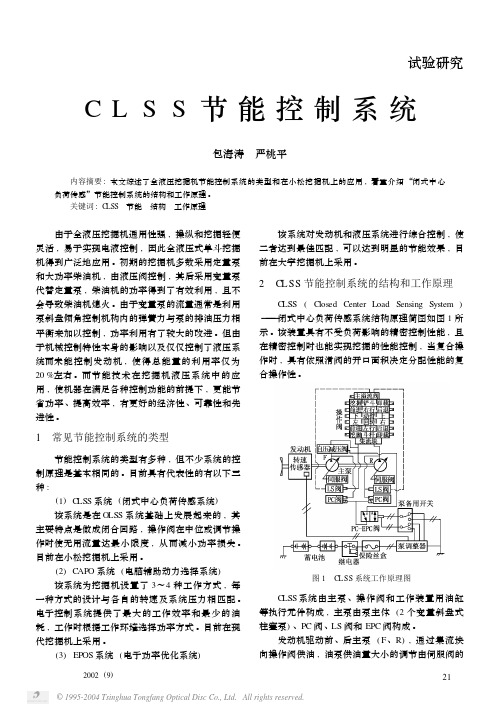
2 C L SS节能控制系统的结构和工作原理C LSS(Closed Center Load Sensing System)———闭式中心负荷传感系统结构原理简图如图1所示。
液压挖掘机的三种流量控制方式

液压挖掘机的三种流量控制方式摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。
本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。
这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。
液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。
因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节如图2所示,有两种方法调节系统流量。
第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。
常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。
挖掘机液压系统设计

摘要液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的土方机械。
液压挖掘机利用液压元件(液压泵、液压马达、液压缸等)带动各种构件动作,具有许多优点,于是它对液压系统的设计提出了很高的要求,其液压系统也是工程机械液压系统中较为复杂的。
因此,对挖掘机液压系统的分析设计对推动我国挖掘机发展具有十分重要的意义。
在搜集了国内外挖掘机液压系统相关资料的基础上,了解了挖掘机液压系统的发展历史,并对挖掘机液压系统的技术发展动态进行了分析总结。
本次毕业设计课题是液压挖掘机。
挖掘机由多个系统组成,包括液压系统,传动系统,操纵系统,工作装置,底架,转台,油箱,发动机安装等。
本人的设计主要致力于分析和设计中型液压挖掘机液压系统的液压元件。
以液压元件和液压回路为主。
关键词:挖掘机液压系统液压泵AbstractConstruction machinery hydraulic excavator is an important species, is a widely used in construction, railway, highway, water conservancy, mining and other construction projects of Earthmoving Machinery. The use of hydraulic excavator hydraulic components (hydraulic pumps, hydraulic motors, hydraulic cylinders, etc.) bring a variety of component movement, has many advantages, so it is the design of the hydraulic system of the high demands, and its hydraulic system engineering machinery hydraulic system is the most complex. Therefore, the analysis of excavator hydraulic system design in promoting the development of China's excavator of great significance.At home and abroad in gathering relevant information excavator hydraulic system on the basis of the understanding of the excavators of the historical development of the hydraulic system, hydraulic excavators and technical developments have been analyzed and summarized. The graduation project is the subject of hydraulic excavators YW160. Mini-excavator from multiple systems, including hydraulic system, transmission system, control system, the working devices, chassis, turntable, fuel tanks, engine installation. I focused on the design of the analysis and design of medium-sized hydraulic excavator hydraulic system hydraulic components. Hydraulic components and the main hydraulic circuit.Keywords: hydraulic pump hydraulic system of excavator目录第1章概论 (5)1.1挖掘机的简介 (5)1.2液压挖掘机的发展概况 (6)1.2.1 国外液压挖掘机目前水平及发展趋势 (7)1.2.2 国内液压挖掘机的发展概况 (10)1.3设计的内容和设计内容的意义 (10)1.4 设计内容的安排 (12)第2章挖掘机液压系统的计算 (12)2.1液压挖掘机的基本系统 (12)2.1.1 挖掘机液压系统的简介 (12)2.1.2YW-160型单斗液压挖掘机液压系统 (13)2.2液压挖掘机工作装置油缸作用力的确定 (16)2.2.1 动臂油缸作用力分析 (16)2.2.2 铲斗油缸工作受力分析 (17)2.2.3 斗杆油缸作用力分析 (18)2.3液压元件的计算 (20)2.3.1 液压缸内径 (20)2.3.2 缸筒壁厚 (20)2.3.3 缸筒壁厚验算 (20)2.3.4 活塞杆计算 (21)2.3.5 活塞杆强度计算 (21)2.3.6 确定液压系统的工作压力 (21)2.3.7 确定液压缸的主要参数和工作压力 (21)2.3.8 确定液压马达的排量和工作压力 (22)2.3.9 计算液压缸与液压马达的流量 (22)第3章液压元件的选择 (23)3.1液压缸的选择 (23)3.2 液压泵的选择 (23)3.3液压马达的选择 (23)3.4发动机的选择 (23)第4章液压系统回路的设计 (24)4.1液压缸控制回路 (24)4.2液压马达控制回路 (25)4.3计算系统所需的最大流量 (26)4.4压力损失的计算 (26)4.5拟定液压源控制回路 (27)第5章液压系统性能验算 (28)5.1液压系统功率损失 (28)5.2液压油油温过高的原因及预防措施 (29)第6章结论和展望 (31)6.1结论 (31)6.2展望 (32)致谢 (33)参考文献 (34)第1章概论液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的突发机械。
挖掘机产品介绍(修改版)

燃油消耗率:228g/kw/h
功率调节方式:总功率调节+变功率+负流量控制
我公司挖掘机220mm
最大挖掘深度:7490mm
最大垂直挖掘深度:6520mm
最大挖掘高度:10390mm
最大卸载高度:7320mm 最小回转半径:4300mm
我公司挖掘机产品简介和保养
液压挖掘机概述
(一)液压挖掘机特点
3、适应性强 除挖掘作业外在主阀功能允许的前提下,或在原系统的基 础上增加简单的回路,就可改变其用途。如破碎拆除、凿岩、 夯实,还可以改装成抓钢机、林业机械等。
液压剪
液压破碎机
拆除机
液压挖掘机概述
(二)最常见的液压挖掘机的种类
挖掘机的种类繁多,分类 的方法也有几种。按行走装置 的不同可分为:履带式、轮胎 式。
斗杆挖掘力:95kn
发动机型号:原装康明斯6BT5.9 增压 直喷 额定功率:H/S/L 108/102/95kw 2100/1700/1500rpm
燃油消耗率:179g/kw/h
功率调节方式:总功率调节+变功率+负流量控制
我公司挖掘机产品简介和保养 SW210LC-5作业范围: 最大作业半径:9944mm 最大挖掘深度:6638mm
最大垂直挖掘深度:6057mm
最大挖掘高度:9489mm
最大卸载高度:6672mm
最小回转半径:3542mm
我公司挖掘机产品简介和保养
SW230LC-5液压挖掘机
我公司挖掘机产品简介和保养 SW230LC-5技术参数
重量:23800kg 斗容量:1.1m3 接地比压:0.0356mPa 回转速度:12r/min 行走速度 高/低: 5.5/3.5km/h
韩国大宇车床报警表
2001:急停x轴z轴跳闸2002:主轴报警2003:控制电路保护器跳闸或保险丝断2004:液压电机过载2005:液压压力低检查液压压力开关2007:主轴没检测到转速2008:确认变速箱限位开关2009:第二主轴紧急状态2010:机床未准备2012:X轴扭矩限制器开关跳闸2013:Z轴扭矩限制器开关跳闸2014:B轴扭矩限制器开关跳闸2017:检查油泵2019:保护继电器设置参数不对2020:交流电机过载(水泵润滑泵)2021:转矩限制跳过命令不正确的使用,超过设定值2022:主轴定位不被接受2023:检查刀台锁紧2024:输入错误2025:保护继电器设置2026:变速指令不接受检查变速确认开关2027:主轴转速到达信号没有检测到2028:主轴旋转命令不接受2029:门开关2030:机锁命令无效2031:没有返回参考点2032:自动模式下进给保持状态2033:空气压力低2034:卡盘确认开关2035:轴改变命令不接受2036:卡盘夹紧松开夹紧命令不接受2037:尾座2038:编程开关2039:M10.M11脚脚踏开关2040:Bar(M50M51)命令不接受2041:Bar2042:M52M53门命令不接受2043:M38M39M58M59不接受2044:2045:快速下降M80M81不接受2046:检查卡盘及参数M692047:编码器信号错误2048:程序命令错误2049:松刀时间过长2050:润滑油2051:冷却液2052:卡盘开关2053:2054:2055:同步命令使用不当2056:指令不对2057:计数器2058:计数器2059:2060:卡盘夹紧状态2061:2062:尾座限位2063:尾座限位2093:参考点2096:进给倍率是0 2097:机床锁2098:M00M01命令状态。
1 挖掘机发展史

国外挖掘机目前水平 及发展动向
4
国外挖掘机目前水平及发展动向
• 工业发达国家的挖掘机生产较早,法国、德国、美国、俄罗斯、日本 是斗容量3.5-40m³ 单斗液压挖掘机的主要生产国,从20世纪80年代开 始生产特大型挖掘机。例如,美国马利昂公司生产的斗容量50-150m³ 剥离用挖掘机,斗容量132m³ 的步行式拉铲挖掘机;B-E(布比赛路 斯-伊利)公司生产的斗容量168.2m³ 的步行式拉铲挖掘机,斗容量 107m³ 的剥离用挖掘机等,是世界上目前最大的挖掘机。 从20世纪后期开始,国际上挖掘机的生产向大型化、微型化、多功能 化、专用化和自动化的方向发展。 1)开发多品种、多功能、高质量及高效率的挖掘机。为满足市政 建设和农田建设的需要,国外发展了斗容量在0.25m³ 以下的微型挖掘 机,最小的斗容量仅在0.01m³ 。另外,数量最多的中、小型挖掘机趋 向于一机多能,配备了多种工作装置——除正铲、反铲外,还配备了 起重、抓斗、平坡斗、装载斗、耙齿、破碎锥、麻花钻、电磁吸盘、 振捣器、推土板、冲击铲、集装叉、高空作业架、铰盘及拉铲等,以 满足各种施工的需要。与此同时,发展专门用途的特种挖掘机,如低 比压、低嗓声、水下专用和水陆两用挖掘机等。
7
国外挖掘机目前水平及发展动向
• 4)更新设计理论,提高可靠性,延长使用寿命。美、英、 日等国家推广采用有限寿命设计理论,以替代传统的无限 寿命设计理论和方法,并将疲劳损伤累积理论、断裂力学、 有限元法、优化设计、电子计算机控制的电液伺服疲劳试 验技术、疲劳强度分析方法等先进技术应用于液压挖掘机 的强度研究方面,促进了产品的优质高效率和竞争力。美 国提出了考核动强度的动态设计分析方法,并创立了预测 产品失效和更新的的理论。日本制定了液压挖掘机构件的 强度评定程序,研制了可靠性住处处理系统。在上述基础 理论的指导下,借助于大量试验,缩短了新产品的研究周 期,加速了液压挖掘机更新换代的进程,并提高其可靠性 和耐久性。例如,液压挖掘机的运转率达到85%-95%, 使用寿命超过1万小时。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通知有前方动作。
当具备以上三个条件后, EPO S- 控制器将 根据主泵压力 (即行走负荷, 由压力传感器测得) , 来 实现 、 速切换, 当主泵的两个压力传感器中较大 者达到27M Pa 以上, 连续215s 后, 控掘机将切换成
速行驶; 当压力降到1310M Pa 以下, 连续215s 后, 将切换成 速行驶, 当压力在13~ 27M Pa 时, 将维 持原速。在满足了 速条件后, EPO S- 控制将输 出电流给高速伺服阀, 高速伺服阀的二次压力将推 动行走马达斜盘倾角改变活塞移动, 减小行走马达 的斜盘倾角, 以实现高速行驶。 412 自动怠速功能
所谓动力模式, 即可供选择的功率方式, 分 、 、 三速。当发动机起动后, 被自动设置为 速, 作 业时可根据需要按下监控板上的作业模式按键来选
器通过控制发动机控制马达来控制发动机转速, 油 择所希望的功率方式。动力模式的形成是由于 E2
门控制器的油门大小信号来自两个方面, 即来自燃 PO S— 控制器通过对发动机和主轴泵的控制, 使
图6
代表一种作业模式。EPO S— 控制器接受指令后, 便输出0—600mA 的电流, 给动臂优先液控阀, 液控 阀将输出0—219M Pa 的二次压力作用到动臂优先 阀 B P 上, 使 B P 阀产生节流作用, 从而多路阀的并 联通路变窄 (如图6示) , 在做复合动作时, 使液压油 优先通过动臂或铲斗, 使动臂或铲斗动作速度加快。 不同的作业模式, 动臂 (或铲斗) 与斗柄就会有不同 的速度比。 311 挖掘模式
图1
《建筑机械》1998年第8期
37
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
其中 EPO S— 控制器是该系统的中枢部分, 它通过微处理器按操纵指令和传感信号控制发动 机、主泵和控制阀来完成各项功能。发动机油门控制
CN 5218 0V 12V 0V
按下各模式 按键时
相应指示 灯亮
12V
图5
3 作业模式与回转优先功能
大宇挖掘机— 型通过对多路阀的电子控制,
实现对流量分配进行优化, 以减少做复合动作时不
断调节, 每个动作快慢的时间, 降低精细作业对操纵
者熟练程度的要求。作业模式分为挖掘、装车、整地
和起重四个模式。挖掘模式为标准模式, 发动机起动
图4
212 动力模式的 、 、 速 在 速时, 发动机转速为额定转速的85% , 、
速时为额定转速。在 、 速时, 由于速度感应系 统不参入主泵的流量控制, 油泵只利用发动机输出 功率的85%。在 速时, 由于压力感应控制系统与速
《建筑机械》1998年第8期
39
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
国外技术
韩国大宇挖掘机— 型 EPO S 系统
济南交通高等专科学校 路晶 王庆波
内容摘要: 大宇挖掘机— 型采用了新型的电子动力优化系统 (EPO S) , 大大提高了挖掘机的综合性能。本文 将详细地介绍该电子控制系统的动力模式、作业模式、回转速度可调功能、自动变速功能、自动怠速功能和防过热 功能的原理及工作过程。
4 自动变速、自动怠速与防过热功能 411 自动变速功能
这是根据行走负荷自动改变行走速度的功能。
在 EPO S 系统中, 要实现此功能需具备三个条件。 第一, 将自动行车开关打到“ON ”位置, 否则挖掘机 将固定在 速行驶。第二, 发动机转速高于1400r m in, 低于1400r m in 即使开关打到“ON ”位置, 也只 能以 速行驶。第三, p y 开关关闭, p y 开关又称行车 开关或怠速 (1) 开关, 它与 p x 开关并列安装在多路 阀上, 这两个开关都是压力开关, 当操纵行车手柄, 多路阀上的行车阀芯移动时, 将会切断与 p y 开关所 在油路并联的回油箱油路, 使 p y 开关所在油路升 压, 从而 p y 开关闭合, CN 1217信号线将有电流, 从 而通知 EPO S- 控制器现处于行车状态, p x 开关 原理, 当 p y 开关相同, 当前方任一作业动作出现时, p x 开关闭合, CN 1218线得电, EPO S - 控制器被
用 途
希望快速作业时
一般的作业条件
低噪音, 低耗油作业 比起作业速度, 更要求精细作业的场合
泵采取综合控制, 包括压力感应控制和电子控制, 其 节发动机与主油泵的匹配, 使发动机始终工作在额
中压力感应控制包括恒功率控制、负流量控制等。电 定转速附近, 油泵几乎100◊ 利用发动机的输出功
子控制即由 EPO S- 控制器来实现的速度感应控 制。在 速时, 由这两种控制形式共同实现对主泵的
为了节能和降低噪音, EPO S 系统具备自动怠 速功能。当自动怠速开关处于打开位置后, EPO S-
控制器将会执行自动怠速功能, 若 p x、p y 开关同 时处于打开状态 (即无作业或行走动作) 4s 钟后, E2 PO S- 控制将促使发动机油门控制器工作, 使发 动机速度降至怠速值, 当控掘机有任何动作时, 则发 动机转速将从怠速值立即返回到原工作速度。
EPO S - 控制器将使 CN 327信号线搭铁 (参照图 2) , 使用于2档溢流阀的伺服阀 (A 3) 得电, A 3将有压 力油输出, 作用到装在多路阀上的主溢流阀上, 主溢 流阀为先导式溢流阀, 压力油将使先导式溢流阀的 先导阀弹簧的预压紧力增大。使整个系统的溢流压
力从30M Pa 升高到32M Pa, 使起重能力增强。 315 回转优先功能
度感应控制系统共同控制主泵的流量, 油泵几乎完 全利用发动机输出功率, 作业速度快, 掘削力大。在
速时, 压力感应控制和速度感应控制的整个控制 过程如图5示。其中 p 1为自身泵的压力, p 2为相对泵
∑ ∑ 的压力, p 为两泵的压力和, p 与 p pr 阀的二
次压力 p f 将共同推动油泵调节器滑阀的移动, 滑阀 移动将会改变油泵的斜盘倾角, 滑阀的位移量 x =
1 EPO S 系统的构成 EPO S 系统回路图如图1示, 电路图如图2示。该
系统主要由 EPO S— 控制器、发动机油门控制器、 发动机控制马达、监控板、燃油控制旋钮、自动行车 开关、回转旋扭、功率最大开关、动臂优先液控阀、回 转优先液控阀、高速伺服阀、用于2档溢流阀的伺服 阀、发动机速度传感器、油压传感器 (测量主油泵压 力)、P x P y 油压开关、p p r阀等。
∑ ∑ ( p A - p fA f ) k - ∆, 其中 A 为 p 的作用面
积, A f 为 p f 的作用面积, K 为弹簧的刚度系数 ∆ 为 弹簧的初始压缩量。
斗柄速度为标准挖掘设定值, 同时发动机转速最高。 312 装车模式
表2
作业模式 按 键
挖掘模式 装车模式 起重模式
整地模式
CN 5216 0V 0V 12V 12V
后, 便自动设定为挖掘模式, 当选择所需的作业模式
时, 可按监控板上相应的按键。
当选择了某种作业模式后, 这时作业方式信号
a (CN 5218信号线) 和作业方式信号线 b (CN 5216信
号线, 如图2示)。将分别向 EPO S— 控制器输出一
个电压信号, 这两个信号组成一个指令 (如表2示) ,
EPO S— 控制器向动臂优先液控阀输出电流 I= 400mA , 液控阀的二次压力 p f = 115M Pa, 动臂
此时 I = 600mA , p f = 219M Pa1B P 阀大部分节 流, 动臂速度增加, 以适合于装车时迅速提升动臂的 要求, 同时发动机转速最高。 313 整地模式
此时 I = 0, p f = 0, B P 阀无节流作用, 斗柄速度 最快, 适合于整地时斗柄的快速前推或后拉, 动臂的 缓慢下降或上升, 同时, 发动机转速最高。 314 起重模式
H EAV Y INDU STR IES L TD 2 黄宗益1液压挖掘机的电子控制1《建筑机械》19931 (7)
作者地址: 济南市交校路5号 邮政编码: 250023 收稿日期: 1997111122
413 防过热功能 当冷却水温度高于107℃时, 蜂鸣器将立即报
警, 同时, EPO S— 控制器将促使发动机油门控制 器工作, 使发动机转速变为怠速, p pr 阀供电电流中 断, 使功率方式变为 速, 从而起到保护发动机的作 用。
参 考 文 献 1 大 宇 挖 掘 机— 型 电 气 部 分、液 压 部 分 1DA EW OO
关键词: 大宇挖掘机— 型 EPO S 系统
目前, 韩国大宇重工业在中国投产的大宇挖掘 机— 型, 普遍采用了新型电子动力优化系统—E2 PO S (E lect ron ic Pow er O p t im izing Sy stem ) , 该 系 统通过 EPO S— 控制器 (微处理器) 实现对发动 机、液压泵和控制阀的电子控制, 使挖掘机具有了动 力模式、作业模式、回转优先功能、自动变速、自动怠 速和防过热等功能。由于这些机电一体化技术的应 用, 使挖掘机提高了作业效率和操纵性能, 降低了油 耗, 延长了使用寿命。
在作业过程中 (参照图1) , 发动机速度传感器将不断
检测发动机的实际转速 N , 装在发动机控制马达的 角度传感器将通过检测油门杆角度来检测发动机的
某一油门杆位置的额定转速 N 0 (油门杆角度 Η与额 定转速 N 0关系如图3示)。EPO S— 控制器将对两 者进行比较, 取差 ∃N = N 0 - N (其中, ∃N 称发动 机负荷均衡转速差值) , 控制器将按 ∃N 成比例输出 电流 I 给 p p r阀 (油泵调节器电液比例阀) , ∃N 越大 (即发动机受阻越大) , 输出的电流 I 也会越大 ( I 与 ∃N 的关系如图4所示) , 同时 p p r阀输出的二次压力 p f 也越大, 由于 p f 增大将会使油泵斜盘倾角减小, 从而油泵的流量将会减小, 使输入功率与扭矩都降 低, 从而防止发动机过载。由于速度感应系统随时调