运筹学第十一章网络计划PPT课件
合集下载
运筹学课件ch11网络计划PPT39页

▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
39
•
29、在一切能够接受法律支配的人类 的状态 中,哪 里没有 法律, 那里就 没有自 由。— —洛克除 法律。 ——塞·约翰逊
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
运筹学课件ch11网络计划
•
26、我们像鹰一样,生来就是自由的 ,但是 为了生 存,我 们不得 不为自 己编织 一个笼 子,然 后把自 己关在 里面。 ——博 莱索
•
27、法律如果不讲道理,即使延续时 间再长 ,也还 是没有 制约力 的。— —爱·科 克
•
28、好法律是由坏风俗创造出来的。 ——马 克罗维 乌斯
运筹学网络计划
A
拆迁
/
2
B
工程设计
/
3
C
土建工程设计
B
2.5
D
采购设备
B
6
E
厂房土建
C、A
20
F
设备安装
D、E
4
G
设备调试
F
2
A(2)
1
B (3)
2
C (2.5)
3
D (6)
E (20)
G (2)
F (4)
4
5
6
用箭秆删除法标号(保证箭尾号大于箭头号)
工序
A
B
C
D
EFGHIJKL
M
N
紧前工序
_
_
_
_
D
E
A
F
G
B
由本例可见:关键工序 头尾皆有
=
关键工序时间之和=工期T。
,但反之未必。
二、工程完工期的概率分析
(计划评审技术PERT)
1、PERT与 CPM的区别:
CPM工序时间是确定的
工程工期的概率分析是是时间不确定情况下PERT
的主要工作
确定平均工序时间的三点估计法:
设工序最乐观时间为aij,最悲观时间为bij,最可能时间为m ij ,
t ij
a ij 4m ij bij
- 给任意点 i 标 Li ,
Li=Min{以 i 为箭尾的各箭之 “箭头
- 箭长tij”}
16
(3)求关键路(用标号法)
6
2
8
0
0 1
3
B '(0)
3
2)计算各工序 i
运筹学课件第11章网络计划
时间-质量优化
总结词
时间-质量优化关注的是如何在保证质量的 前提下,最小化完成时间和资源消耗。
详细描述
时间-质量优化是网络计划优化的一个重要 方面,其主要目标是平衡时间、资源和质量 之间的关系,以确保项目在满足质量要求的 前提下,实现完成时间的最小化和资源消耗
的合理化。在进行时间-质量优化时,需要 充分考虑质量标准和质量控制的要求,通过
要点二
详细描述
建立资源需求计划,明确各项任务所需的资源种类、数量 和时间要求。在项目实施过程中,对资源使用情况进行实 时监控,及时调整资源分配,避免资源浪费或短缺现象, 提高资源警潜在风险,采取有效措施应对风险。
详细描述
建立风险预警机制,通过收集项目相关信息,及时发现 潜在风险源。对识别出的风险进行评估和分析,制定相 应的应对措施和预案。在风险发生时,迅速启动应急响 应程序,降低风险对项目的影响。同时,应定期回顾并 更新风险管理策略,以确保其始终能反映项目的实际情 况。
最早开始时间
指某项活动最早可以开始的时间。
最早完成时间
指某项活动最早可以完成的时间,等于最早开始时间加上该活动的持续时间。
最晚开始时间与最晚完成时间
最晚开始时间
指某项活动最晚可以开始的时间,以确保整个工程按期完成。
最晚完成时间
指某项活动最晚可以完成的时间,等于最晚开始时间加上该活动的持续时间。
关键路径与关键活动
时间-资源优化
总结词
在时间-资源优化中,目标是确定最佳的资源分配方案,以最小化完成时间或最大化资 源效率。
详细描述
时间-资源优化是一种常见的网络计划优化方法,其核心思想是在满足时间限制的前提 下,通过合理分配资源来提高资源利用效率和项目完成速度。具体而言,时间-资源优 化通常采用线性规划、整数规划等数学方法,通过建立数学模型来描述资源与时间之间
运筹学网络计划-PPT精选文档
Draw network plot
Ch7 网络计划 Network Programming
2019/3/21
Page 3
• 网络还是进行计划工作的有效工具
Ch7 网络计划 Network Programming
2019/3/21
Page 4
优点:直观、易懂、便于检查 缺点:不能反映相互之间联系和影响, 无法找出关键工作。
2019/3/21
Page 11
网络图 由工序、事件及标有完成各道工序所需时间所构成的连 通有向图。 箭示网络图 用箭条表示工序的计划网络图。本章讲的就是箭示图 节点网络图 用节点表示工序的计划网络图 路 从起点沿箭头方向到终点的有向路。 紧前工序 紧接某项工序的先行工序 紧后工序 紧接某项工序的后续工序 前道工序 某工序之前的所有工序
表7-1 工序明细表
序 号 1 2 3 代 号 A B C 工序名称 基础工程 构件安装 屋面工程 A B 紧前工序 时间 (天 ) 40 50 30 序 号 5 6 7 代 号 E F G 工序名称 装修工程 地面工程 设备安装 紧前工序 C D B 时间 (天 ) 25 20 50
横道图
5月 6月
时间
开题报告
3月
4月
英文翻译
文献查阅 论文撰写 论文答辩
7.1 绘制网络图 Draw network plot
Ch7 网络计划 Network Programming
2019/3/21
Page 5
7.1.1项目网络图的基本概念 用网络图编制的计划称为网络计划,网络计划技术由计划协 调技术(Program Evaluation and Review Technique 简写为 PERT)与关键路径法(Critical Path Method 简写为CPM)组 成。 PERT主要针对完成工作的时间不能确定而是一个随机变量 时的计划编制方法,活动的完成时间通常用三点估计法,注重 计划的评价和审查。 CPM以经验数据确定工作时间,看作是确定的数值, 主要研究项目的费用与工期的相互关系。通常将这两种方 法融为一体,统称为网络计划、网络计划技术 (PERT/CPM)。
Ch7 网络计划 Network Programming
2019/3/21
Page 3
• 网络还是进行计划工作的有效工具
Ch7 网络计划 Network Programming
2019/3/21
Page 4
优点:直观、易懂、便于检查 缺点:不能反映相互之间联系和影响, 无法找出关键工作。
2019/3/21
Page 11
网络图 由工序、事件及标有完成各道工序所需时间所构成的连 通有向图。 箭示网络图 用箭条表示工序的计划网络图。本章讲的就是箭示图 节点网络图 用节点表示工序的计划网络图 路 从起点沿箭头方向到终点的有向路。 紧前工序 紧接某项工序的先行工序 紧后工序 紧接某项工序的后续工序 前道工序 某工序之前的所有工序
表7-1 工序明细表
序 号 1 2 3 代 号 A B C 工序名称 基础工程 构件安装 屋面工程 A B 紧前工序 时间 (天 ) 40 50 30 序 号 5 6 7 代 号 E F G 工序名称 装修工程 地面工程 设备安装 紧前工序 C D B 时间 (天 ) 25 20 50
横道图
5月 6月
时间
开题报告
3月
4月
英文翻译
文献查阅 论文撰写 论文答辩
7.1 绘制网络图 Draw network plot
Ch7 网络计划 Network Programming
2019/3/21
Page 5
7.1.1项目网络图的基本概念 用网络图编制的计划称为网络计划,网络计划技术由计划协 调技术(Program Evaluation and Review Technique 简写为 PERT)与关键路径法(Critical Path Method 简写为CPM)组 成。 PERT主要针对完成工作的时间不能确定而是一个随机变量 时的计划编制方法,活动的完成时间通常用三点估计法,注重 计划的评价和审查。 CPM以经验数据确定工作时间,看作是确定的数值, 主要研究项目的费用与工期的相互关系。通常将这两种方 法融为一体,统称为网络计划、网络计划技术 (PERT/CPM)。
运筹学课件第11章网络计划

运筹学课件第11章网络计 划
概述
网络计划是一种项目管理工具,用于计划和控制项目中的活动和关键路径, 提高项目管理的效率和准确性。
网络表示法
网络计划可以使用不同的表示法,包括有向图表示法、AOE网络和AON网络, 每种表示法都有其独特的优势和应用场景。
网络计划的要素
网络计划包括活动事件,时间与时刻,活动之间的时间关系,网络路径与关 键路径,以及网络计划的表示方法。
网络计划的分析方法
网络计划的分析方法包括构造活动关系图,计算活动的最早开始时间和最晚 开始时间,活动的最早完成时间和最晚完成时间,以及活动的时差和自由时 差。
网络项目成本管理,并 且有多种软件可以支持网络计划的制定和执行过程。
案例分析
通过实际案例,我们可以了解网络计划在项目管理中的实践,以及网络计划 在工程管理中的应用,并从中学习和总结经验教训。
总结
网络计划具有明显的优势和应用前景,但也存在一些缺点。我们需要综合考 虑,在实际应用中灵活运用网络计划,并不断总结和改进。
概述
网络计划是一种项目管理工具,用于计划和控制项目中的活动和关键路径, 提高项目管理的效率和准确性。
网络表示法
网络计划可以使用不同的表示法,包括有向图表示法、AOE网络和AON网络, 每种表示法都有其独特的优势和应用场景。
网络计划的要素
网络计划包括活动事件,时间与时刻,活动之间的时间关系,网络路径与关 键路径,以及网络计划的表示方法。
网络计划的分析方法
网络计划的分析方法包括构造活动关系图,计算活动的最早开始时间和最晚 开始时间,活动的最早完成时间和最晚完成时间,以及活动的时差和自由时 差。
网络项目成本管理,并 且有多种软件可以支持网络计划的制定和执行过程。
案例分析
通过实际案例,我们可以了解网络计划在项目管理中的实践,以及网络计划 在工程管理中的应用,并从中学习和总结经验教训。
总结
网络计划具有明显的优势和应用前景,但也存在一些缺点。我们需要综合考 虑,在实际应用中灵活运用网络计划,并不断总结和改进。
管理运筹学ppt11第十一章 图与网络模型
图 11-13
11§.33 最小生成树问题
例4 解法如下
(1)在G中找一个圈(v1,v7,v6,v1),去掉权数最大的边[v1,v6],得图 G1,如图11-13(b)。
表 11-1
年份
1
2
3
4
5
年初价格
11
11
12
12
13
设备维修费如表 11-2 所示。
表 11-2
使用年数
0~1
1~2
2~3
3~4
4~5
每年维修费
5
6
8
11
18
11§.22
最短路问题
例 3 求解如下:将问题转化为最短路问题,如图 11-8 所示。 用 vi 表示“第 i 年年初购进一台新设备”,弧(vi,vj)表示第 i 年年初购进 的设备一直使用到第 j 年年初。
网络:
在赋权的有向图 D 中指定一点,称为发点(记为 vs),指定另一点为 收点(记为 vt),其余点称为中间点,并把 D 中的每一条弧的赋权数 cij 称为弧(vi,vj)的容量,这样的赋权有向图 D 称为网络。
本章内容
1 2 3 4 5
11§.22 最短路问题
最短路问题:对一个赋权的有向图 D 中的指定的两个点 vs 和 vt 找到 一条从 vs 到vt 的路,使这条路上所有弧的权数的总和最小,这条路被 称之为从 vs 到 vt 的最短路。这条路上所有弧的权数的总和被称为从 vs 到 vt 的距离。
终点 v3 标以(22,1)。
11§.22 最短路问题
(4)这时 I={v1, v2, v3},J={v4, v5, v6}。则min (s14, s15, s16, s24, s25, s26, s34, s35, s36) =s14=30。给弧 (v1, v4)的终点 v4 标以(30,1)。 (5)这时 I={v1, v2, v3, v4}, J={v5, v6}。则min(s15,s16,s25,s26,s35,s36,s45,s46)=s15=41。 给弧(v1,v5)的终点 v5 标以(41,1)。 (6)这时 I ={v1, v2, v3, v4, v5}, J={v6}。则min(s16,s26,s36,s46,s56)=s36=s46=53。 给弧(v3 , v6)和(v4,v6)的终点v6标以(53,3)和(53,4),最终得到图 11-10,可知,v1 到 v6 的距离是 53,最短路径有两条:v1→v3→v6 和 v1→v4→v6。
11§.33 最小生成树问题
例4 解法如下
(1)在G中找一个圈(v1,v7,v6,v1),去掉权数最大的边[v1,v6],得图 G1,如图11-13(b)。
表 11-1
年份
1
2
3
4
5
年初价格
11
11
12
12
13
设备维修费如表 11-2 所示。
表 11-2
使用年数
0~1
1~2
2~3
3~4
4~5
每年维修费
5
6
8
11
18
11§.22
最短路问题
例 3 求解如下:将问题转化为最短路问题,如图 11-8 所示。 用 vi 表示“第 i 年年初购进一台新设备”,弧(vi,vj)表示第 i 年年初购进 的设备一直使用到第 j 年年初。
网络:
在赋权的有向图 D 中指定一点,称为发点(记为 vs),指定另一点为 收点(记为 vt),其余点称为中间点,并把 D 中的每一条弧的赋权数 cij 称为弧(vi,vj)的容量,这样的赋权有向图 D 称为网络。
本章内容
1 2 3 4 5
11§.22 最短路问题
最短路问题:对一个赋权的有向图 D 中的指定的两个点 vs 和 vt 找到 一条从 vs 到vt 的路,使这条路上所有弧的权数的总和最小,这条路被 称之为从 vs 到 vt 的最短路。这条路上所有弧的权数的总和被称为从 vs 到 vt 的距离。
终点 v3 标以(22,1)。
11§.22 最短路问题
(4)这时 I={v1, v2, v3},J={v4, v5, v6}。则min (s14, s15, s16, s24, s25, s26, s34, s35, s36) =s14=30。给弧 (v1, v4)的终点 v4 标以(30,1)。 (5)这时 I={v1, v2, v3, v4}, J={v5, v6}。则min(s15,s16,s25,s26,s35,s36,s45,s46)=s15=41。 给弧(v1,v5)的终点 v5 标以(41,1)。 (6)这时 I ={v1, v2, v3, v4, v5}, J={v6}。则min(s16,s26,s36,s46,s56)=s36=s46=53。 给弧(v3 , v6)和(v4,v6)的终点v6标以(53,3)和(53,4),最终得到图 11-10,可知,v1 到 v6 的距离是 53,最短路径有两条:v1→v3→v6 和 v1→v4→v6。
运筹学网络计划
d
40 40 40 4 44
44 44
5
76
f
76 4 80
7
80 80 12
24
6
48 44 4
m
9
44 10 48 j 12
76 76 11 76 16
n
g
4
60 60 k 60 60 10
44 44
60
7
44
h
60 48 60
i
如工期压缩为73 天,应压缩哪些 工序的工时?— —关键工序。
8
网络图优化
44
44 44
g
4
54 54 k
54 54 10
54
7
44
h
54
i
48 54
8
压缩工序g1天, 工序j6天,网络图 如图。关键工序 有所变化。但未 达到工期73天的 要求。
网络图优化
(2)时间—资源优化。 尽量合理地利用现有的资源,并缩短工程周期。 优先安排关键工序和视察较小的工序所需要的资 源;
a=最乐观时间、b=最保守时间、m=最可能时间 估计 利用公式
a 4m b 期望时间= 6
二、网络图
对承担的工程经过工序分解、工时确定,根据生 产工艺、生产组织的制约确定出各工序间的逻辑关系 后,可以用一张网络图把上述各点统一反映出来,借 以形象地表达工程计划方案的编制。 绘制网络图:前进法、后退法、任意法。
3. 确定各个环节之间的相互联系,先做什么,后做 什么,哪些可以同时施工——紧前、紧后、平行 关系; 4. 汇总上述各点予以具体分析,计算,得总工期。
将工序及所需要时间、各工序之间的关系整理 这是应用网络技术的第一步。 成表——工序清单。
运筹学课件第11章 网络计划
程序评审技术
程序评审技术是一种对项目活动进行评审和审核 的方法,以确保项目活动的正确性、合理性和可 行性。
网络计划的步骤
1
估算活动持续时间
2
为每个活动估算所需的时间,并尽可 能准确地预测活动的开始和结束时间。
3
确定关键路径
4
通过计算每条路径的总持续时间,找 到项目中最长的路径,即关键路径。
确定项目活动
关键路径和关键活动的识别
关键路径
关键路径是项目中最长的路径,决定了项目的总持续时间和完成时间。
关键活动
关键活动是在关键路径上的活动,其延迟将导致项目延迟。
识别方法
通过计算各个路径的总持续时间,找到最长路径,即为关键路径,关键活动即为该路径上 的活动。
时间和资源的优化
时间优化
通过调整活动的先后顺序和资源分配,缩短项目 的总持续时间,提高项目的执行效率。
作用
网络计划可以帮助项目管理者理清项目的逻辑关系、识别关键路径和活动,以及优化时间 和资源分配,提高项目的执行效率。
例子
一个建筑项目的网络计划可以显示各个施工环节的先后顺序、持续时间和资源需求,帮助 管理者制定合理的施工计划。
关键路径法和程序评审技术
关键路径法
关键路径法是一种基于项目网络计划的方法,用 于确定项目中的关键路径和关键活动,保证项目 按时完成。
资源优化
合理分配资源,确保关键活动得到足够的资源支 持,提高资源利用率和项目的执行质量。
网络计划的实例分析
活动
持续时间
A
3
B5Biblioteka C2D4
E
2
F
3
关键活动 是 否 是 是 否 否
列出项目中所有需要完成的活动,并 确定它们的先后关系。
运筹学网络计划技术
自由时差或单时差FF:
◦ 单代号:FFi=min{ESj}-EFi ◦ 双代号:FFij=min{ESjk}-EFij
48
工作A的TF
工作 A
工作A紧后工作B 工作A的TF
工作A的FF 工作A紧后工作C
总时差为零的工作单时差一定为零,总时差不为零 自由时差也可能是零
49
图上作业法 ◦ 单代号 ◦ 双代号 ◦ 绘制时标网络进度求 时间参数 表上作业法 i
37
工序名 称
紧前工 作
工作时 间
工序名 称
紧前工 作
工作时 间
工序名 称
紧前工 作
工作时 间
A
B C D
-
A A A
60
14 20 30
G
H I J
BC
EF F
7
12 60
M
N O P
JK
IL N M
5
15 2 7
DG 10
E
F
A
A
21
10
K
L
H
JK
25
10
Q
OP
5
38
B A
G M
C
J
P
D E L O H I K N Q
21
A
B Finish
Start
C
D
E
22
优点:
◦ 工序之间关系明确 ◦ 易于绘制 ◦ 国外常用软件采用
缺点:
◦ 无法带时标 ◦ 不够直观,所以国内工程师习惯双代号
23
基本概念:
◦ 以结点表示事件,即一项活动的开始或结束 ◦ 以箭线表示一项活动 ◦ 箭首和箭尾事件:一项工作的开始通常称为箭尾事件; 一项工作的结束通常称为箭首事件。
运筹学网络计划课件
动。 确定每项活动的活动时间
2024年1月2日星期二
作网络图
按时间顺序从左到右地排列 起始点在图的最左边,终点在图的最右边。
2024年1月2日星期二
结点编号——分级编号法
一 2
二 3
四
1
4
5
7
二
三
零
6 三
2024年1月2日星期二
7.1.3 工序时间的估计
7.1 绘制网络图 Draw network plot
7.1 绘制网络图 Draw network plot
网络计划主要应用于新产品研制与开发、大型工程项目的计划编制与 计划的优化,是项目管理和项目安排领域目前比较科学的一种计划编制方法, 比甘特图(Cantt chart)或称横道图(bar chart)计划方法有许多优点。
网络计划有利于对计划进行控制、管理、调整和优化,更清晰地了解工 作之间的相互联系和相互制约的逻辑关系,掌握关键工作和计划的全盘情况。
2024年1月2日星期二
7.1 绘制网络图 Draw network plot
在下图中,A是D、E的紧前工序,D、E是A的紧后工序,F是A的后续工序但不是A的紧后 工序;A是D、E、F的前道工序但不是 F 的紧前工序。
注意紧前工序、紧后工序、前道工序和后续工序之间的关系。
②
A 2天
①
B 3天
3天 E
C 5天
G 1天
③
D 4天
④
F 6天
H 2天
2024年1月2日星期二
⑤ 12
7.1 绘制网络图 Draw network plot
【例7.1】某项目由8道工序组成,工序明细表见表7-1所示。分别用箭线法和节点法绘 制该项目的项目网络图。
2024年1月2日星期二
作网络图
按时间顺序从左到右地排列 起始点在图的最左边,终点在图的最右边。
2024年1月2日星期二
结点编号——分级编号法
一 2
二 3
四
1
4
5
7
二
三
零
6 三
2024年1月2日星期二
7.1.3 工序时间的估计
7.1 绘制网络图 Draw network plot
7.1 绘制网络图 Draw network plot
网络计划主要应用于新产品研制与开发、大型工程项目的计划编制与 计划的优化,是项目管理和项目安排领域目前比较科学的一种计划编制方法, 比甘特图(Cantt chart)或称横道图(bar chart)计划方法有许多优点。
网络计划有利于对计划进行控制、管理、调整和优化,更清晰地了解工 作之间的相互联系和相互制约的逻辑关系,掌握关键工作和计划的全盘情况。
2024年1月2日星期二
7.1 绘制网络图 Draw network plot
在下图中,A是D、E的紧前工序,D、E是A的紧后工序,F是A的后续工序但不是A的紧后 工序;A是D、E、F的前道工序但不是 F 的紧前工序。
注意紧前工序、紧后工序、前道工序和后续工序之间的关系。
②
A 2天
①
B 3天
3天 E
C 5天
G 1天
③
D 4天
④
F 6天
H 2天
2024年1月2日星期二
⑤ 12
7.1 绘制网络图 Draw network plot
【例7.1】某项目由8道工序组成,工序明细表见表7-1所示。分别用箭线法和节点法绘 制该项目的项目网络图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十一章 网络计划(Project Scheduling)
1 网络计划图 2 时间参数计算 3 网络计划的优化
1
网络计划技术的发展
•1956年 杜邦公司 CPM:关键路线法 •1958年 美国海军部建“北极星”导弹 PERT:计划评审法 •1964年 华罗庚《统筹方法平话》 •1961-1972年 美国“阿波罗”登月计划
b
对于每道工序 i , 作业时间的
均值为 方差为
T
i
ai
4mi
6
bi
σ
2 i
(biai
2
)
6
17
工程完工时间等于各关键工序的平均时 间之和。假设所有工序的作业时间相互 独立,且具有相同分布,若在关键路线 上有s道工序,则工程完工时间可以认为 是一个以
s
T a 4m b
i
i
i
E i 1
6
为均值,以
k
机械加工2
h
15
l
机械加工3
k
25
l
装配调试
l
35
/
8
为编制网络计划,首先绘制网络图。网络 图是由结点、弧及权所构成的有向图。
•节点表示一个事件,用圆圈和里面的数
字表示
•弧表示一个工序,用
表示
•权表示为完成某个工序所需的时间或资源等数据,通常标注
在箭线下或其它合适的位置
c3
f
10
18
b 45
1 a2 d4 g5 k7 l 8
D (6)
F (4)
G (2)
5
6
11
例3 绘制工程网络图
工序代号 A B C
紧前工序 / / /
工序时间(周) 2 3 2
D
A
3
E
A
4
续左表
工序代号 F G H I
J
紧前工序 B B
D 、E B、C G、I
工序时间(周)
7 6 4 10 3
解:
E (4)
4 E'(0)
A (2)
2 D (3)
5 H (4)
2 E
s
(
bi
a
i
2
)
i 1
6
为方差的正态分布。根据TE与E2即可计算出工程的不 同完工时间的概率
18
例1 已知某项工程,各关键工序的平均 作业时间与方差如表所示:
工序
T
2
c
10.50
1.36
d
10.16
0.25
f
20.33
4.00
g
5.16
0.25
h
12.83
14.67
由表可以算出,该工程是
以 TE
2
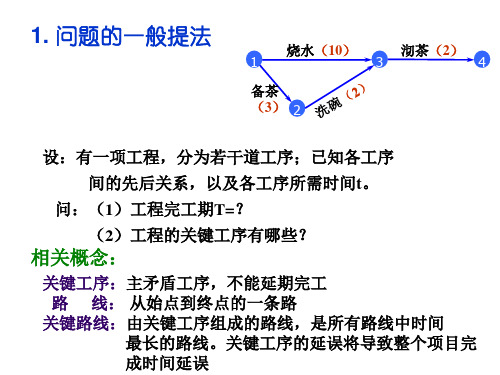
什么是网络计划技术
洗A水壶 灌B水
烧C水 洗D茶杯 拿茶E 叶 泡F茶
1
2
3
4
5
6
7
1
1
15
1
1
1
洗A水壶
1
2
1
灌B水
烧C水
泡F茶
3
5
6
1
洗茶D1杯5
1
E拿茶叶
1 4
1
T =20 T’=18
3
第一节 网络计划图
一、基本术语
1、工序——将整个项目按需要粗细程度分解成若干子 项目或单元。它们是网络计划图的基本组成部分。 2、节点——表示一个事件,是一个或若干个
13
第二节 网络计划图的时间参数计算
1、关键路线
路线
路线的组成
各工序所需时间之各(天)
1
a →b →l
60+45+35=140
2
a →c →f →l
60+10+18+35=123
3
a →d → g→ k → l
60+20+30+25+35=170
4
a → d → →h → l
60+20+15+35=130
工序的开始或结束 3、关键路线——从起点到终点的最长路线 4、关键工序——关键路线上的每道工序
4
二、网络图的绘制
1、原则: 1)两个节点之间只能表示一道工序
工序明细表
工序名称 A B C
紧前(后)工序 - -
A、B
时间 10 5 3
A
C
1
2 10
3
3
B
5
A 1
B 10 5
3
C
2
3
3
5
2)只有一个起点、一个终点
工序名称 A B C D
紧前(后)工序 - -
A、B A、B
1
A
C
4
B
3
D
2
5
1
A
3
C
5
B
D
2
4
6
3)不能出现缺口与回路
4)绘图原则:①只有一个起点和一个终点;②按项目工作 流程自左至右地绘制;③箭头节点的标号要大于箭尾节点的 标号;④箭线应是水平线或具有一段水平线的折线;⑤尽可 能将关键路径布置在中心位置
Ti 58.98
(vi ,v j )CP
为期望值,
以
ቤተ መጻሕፍቲ ባይዱ2 E
2 i
20.53
为方差的正态分布。
(vi ,v j )CP
19
在TE和E2已知条件下,即可估算出工程完 工时间的概率,也可以估算出具有一定概率 的工程完工时间。
60
20
30
25
35
e
6
h
40
15
9
例2 某工厂进行技术改造,需要拆掉旧厂房、建造新厂房 和安排设备。这项改建工程可以分解为7道工序,其相关资 料如下表:
工序代号 A B C D E F G
工序名称 拆迁
工程设计 土建工程设计
采购设备 厂房土建 设备安装 设备调试
紧前工序 / / B B
C、A D、E
1 B (3) 3
F(7)
8
C (2) B '(0) G(6)
6 I (10) 7 J(3)
12
5)两种情况需要引入虚工序
① 两个工序A、B有相同的始点和终点
A
A
虚工序
1
2
B
1
2
B
3
B'
② 四个工序A、B、X、Y有如下关系: A是X的紧前工序,A和B同时又是Y的紧前工序
A
X
1
2
3
A'
4
B5
Y6
虚工序
F
工序时间(周) 2 3 2.5 6 20 4 2
10
工序代号 A B C D E F G
工序名称 拆迁
工程设计 土建工程设计
采购设备
厂房土建 设备安装 设备调试
紧前工序 / / B B
C、A D、E
F
工序时间(周) 2 3 2.5 6 20 4 2
解: 1
A(2)
B (3)
2 C (2.5)
3
E (20) 4
15
估计的三种时间是:
乐观时间:在顺利情况下,完 成工序所需的最少时间,常用ai表示
最可能时间:在正常情况下,完成工序所需要的 时间,常用mi表示
悲观时间:在不顺利情况下,完成工序所需的最多 时间,常用bi表示
16
完成工序所需要的上述三种时间都有一定的概率。 根据经验可以认为近似于正态分布
a
TE
5
a →e → h → l
60+40+15+35=150
完成各个工序需要的时间最长的路线称为关键路线 图中第三条路线为关键路线
14
2、工序时间的计算方法
作业时间(Tij) 为完成某一工序所需的时间称为
该工序 i → j 的作业时间。确定作业 时间的方法有:
1) 一点估计法 在确定作业时间时,只给出一个时间值 2) 三点估计法 在未知和难以估计因素较多的条件下,对完成工序可 估计三种时间,计算平均时间,作为该工序作业时间
7
2、绘制方法:
例1 某项研制新产品工程的各个工序与所需时间以及它们 之间的相互关系如表所示,编制该工程的网络计划
工序
工序代号 所需时间(天) 紧后工序
产品设计与工艺设计
a
60
b,c,d,e
外购配套件
b
45
l
下料、锻件
c
10
f
工装制造1
d
20
g,h
木模、铸件
e
40
h
机械加工1
f
18
l
工装制造2
g
30
1 网络计划图 2 时间参数计算 3 网络计划的优化
1
网络计划技术的发展
•1956年 杜邦公司 CPM:关键路线法 •1958年 美国海军部建“北极星”导弹 PERT:计划评审法 •1964年 华罗庚《统筹方法平话》 •1961-1972年 美国“阿波罗”登月计划
b
对于每道工序 i , 作业时间的
均值为 方差为
T
i
ai
4mi
6
bi
σ
2 i
(biai
2
)
6
17
工程完工时间等于各关键工序的平均时 间之和。假设所有工序的作业时间相互 独立,且具有相同分布,若在关键路线 上有s道工序,则工程完工时间可以认为 是一个以
s
T a 4m b
i
i
i
E i 1
6
为均值,以
k
机械加工2
h
15
l
机械加工3
k
25
l
装配调试
l
35
/
8
为编制网络计划,首先绘制网络图。网络 图是由结点、弧及权所构成的有向图。
•节点表示一个事件,用圆圈和里面的数
字表示
•弧表示一个工序,用
表示
•权表示为完成某个工序所需的时间或资源等数据,通常标注
在箭线下或其它合适的位置
c3
f
10
18
b 45
1 a2 d4 g5 k7 l 8
D (6)
F (4)
G (2)
5
6
11
例3 绘制工程网络图
工序代号 A B C
紧前工序 / / /
工序时间(周) 2 3 2
D
A
3
E
A
4
续左表
工序代号 F G H I
J
紧前工序 B B
D 、E B、C G、I
工序时间(周)
7 6 4 10 3
解:
E (4)
4 E'(0)
A (2)
2 D (3)
5 H (4)
2 E
s
(
bi
a
i
2
)
i 1
6
为方差的正态分布。根据TE与E2即可计算出工程的不 同完工时间的概率
18
例1 已知某项工程,各关键工序的平均 作业时间与方差如表所示:
工序
T
2
c
10.50
1.36
d
10.16
0.25
f
20.33
4.00
g
5.16
0.25
h
12.83
14.67
由表可以算出,该工程是
以 TE
2
什么是网络计划技术
洗A水壶 灌B水
烧C水 洗D茶杯 拿茶E 叶 泡F茶
1
2
3
4
5
6
7
1
1
15
1
1
1
洗A水壶
1
2
1
灌B水
烧C水
泡F茶
3
5
6
1
洗茶D1杯5
1
E拿茶叶
1 4
1
T =20 T’=18
3
第一节 网络计划图
一、基本术语
1、工序——将整个项目按需要粗细程度分解成若干子 项目或单元。它们是网络计划图的基本组成部分。 2、节点——表示一个事件,是一个或若干个
13
第二节 网络计划图的时间参数计算
1、关键路线
路线
路线的组成
各工序所需时间之各(天)
1
a →b →l
60+45+35=140
2
a →c →f →l
60+10+18+35=123
3
a →d → g→ k → l
60+20+30+25+35=170
4
a → d → →h → l
60+20+15+35=130
工序的开始或结束 3、关键路线——从起点到终点的最长路线 4、关键工序——关键路线上的每道工序
4
二、网络图的绘制
1、原则: 1)两个节点之间只能表示一道工序
工序明细表
工序名称 A B C
紧前(后)工序 - -
A、B
时间 10 5 3
A
C
1
2 10
3
3
B
5
A 1
B 10 5
3
C
2
3
3
5
2)只有一个起点、一个终点
工序名称 A B C D
紧前(后)工序 - -
A、B A、B
1
A
C
4
B
3
D
2
5
1
A
3
C
5
B
D
2
4
6
3)不能出现缺口与回路
4)绘图原则:①只有一个起点和一个终点;②按项目工作 流程自左至右地绘制;③箭头节点的标号要大于箭尾节点的 标号;④箭线应是水平线或具有一段水平线的折线;⑤尽可 能将关键路径布置在中心位置
Ti 58.98
(vi ,v j )CP
为期望值,
以
ቤተ መጻሕፍቲ ባይዱ2 E
2 i
20.53
为方差的正态分布。
(vi ,v j )CP
19
在TE和E2已知条件下,即可估算出工程完 工时间的概率,也可以估算出具有一定概率 的工程完工时间。
60
20
30
25
35
e
6
h
40
15
9
例2 某工厂进行技术改造,需要拆掉旧厂房、建造新厂房 和安排设备。这项改建工程可以分解为7道工序,其相关资 料如下表:
工序代号 A B C D E F G
工序名称 拆迁
工程设计 土建工程设计
采购设备 厂房土建 设备安装 设备调试
紧前工序 / / B B
C、A D、E
1 B (3) 3
F(7)
8
C (2) B '(0) G(6)
6 I (10) 7 J(3)
12
5)两种情况需要引入虚工序
① 两个工序A、B有相同的始点和终点
A
A
虚工序
1
2
B
1
2
B
3
B'
② 四个工序A、B、X、Y有如下关系: A是X的紧前工序,A和B同时又是Y的紧前工序
A
X
1
2
3
A'
4
B5
Y6
虚工序
F
工序时间(周) 2 3 2.5 6 20 4 2
10
工序代号 A B C D E F G
工序名称 拆迁
工程设计 土建工程设计
采购设备
厂房土建 设备安装 设备调试
紧前工序 / / B B
C、A D、E
F
工序时间(周) 2 3 2.5 6 20 4 2
解: 1
A(2)
B (3)
2 C (2.5)
3
E (20) 4
15
估计的三种时间是:
乐观时间:在顺利情况下,完 成工序所需的最少时间,常用ai表示
最可能时间:在正常情况下,完成工序所需要的 时间,常用mi表示
悲观时间:在不顺利情况下,完成工序所需的最多 时间,常用bi表示
16
完成工序所需要的上述三种时间都有一定的概率。 根据经验可以认为近似于正态分布
a
TE
5
a →e → h → l
60+40+15+35=150
完成各个工序需要的时间最长的路线称为关键路线 图中第三条路线为关键路线
14
2、工序时间的计算方法
作业时间(Tij) 为完成某一工序所需的时间称为
该工序 i → j 的作业时间。确定作业 时间的方法有:
1) 一点估计法 在确定作业时间时,只给出一个时间值 2) 三点估计法 在未知和难以估计因素较多的条件下,对完成工序可 估计三种时间,计算平均时间,作为该工序作业时间
7
2、绘制方法:
例1 某项研制新产品工程的各个工序与所需时间以及它们 之间的相互关系如表所示,编制该工程的网络计划
工序
工序代号 所需时间(天) 紧后工序
产品设计与工艺设计
a
60
b,c,d,e
外购配套件
b
45
l
下料、锻件
c
10
f
工装制造1
d
20
g,h
木模、铸件
e
40
h
机械加工1
f
18
l
工装制造2
g
30