欧姆龙指令
欧姆龙控制步进电机指令讲解
欧姆龙控制步进电机指令讲解嘿,朋友们!今天咱来聊聊欧姆龙控制步进电机指令,这可真是个有意思的玩意儿啊!你看啊,这欧姆龙就像是一个神奇的指挥官,而步进电机呢,就是那个听指挥的小兵。
想象一下,指挥官一声令下,小兵就得乖乖地行动起来,多带劲啊!欧姆龙控制步进电机指令就像是一道道神秘的密码,只有我们这些懂行的人才能解开。
比如说那个启动指令吧,就像是给小兵的起跑命令,“嘿,跑起来啦!”然后电机就开始转动啦。
还有那个速度指令,这可太重要啦!就好比你让小兵跑快点或者慢点,全靠这个指令来调节呢。
要是调得不合适,那可就乱套啦,要么跑得太快刹不住车,要么慢悠悠得让人着急。
再说说那个方向指令,这就决定了小兵往哪跑啊!是向前冲呢,还是向后退,全在我们的掌控之中。
这些指令可不是随随便便就能用得好的哦,得仔细琢磨,认真研究。
就像你要驯服一匹野马,得先了解它的脾气性格,才能驾驭得了它。
咱在使用这些指令的时候,可不能马虎大意。
就跟做饭似的,盐放多了太咸,放少了没味。
指令给错了或者给得不恰当,那电机可就不听话啦。
比如说,你明明想让它顺时针转,结果给了个逆时针的指令,那不是南辕北辙了嘛!这时候你就得拍拍脑袋,哎呀,我怎么这么糊涂呀!而且啊,不同的应用场景需要不同的指令组合。
这就跟搭积木一样,你得把不同的积木搭在一起,才能搭出你想要的形状。
你不能乱搭一气,那最后搭出来的肯定不是你想要的东西。
在实际操作中,我们可得多实践,多尝试。
就像学骑自行车,一开始可能会摔倒,但多摔几次就会骑啦!咱对这些指令也是,刚开始可能会犯错,但别怕呀,错了就改,慢慢就熟练啦。
总之呢,欧姆龙控制步进电机指令是个很有趣也很有用的东西。
只要我们用心去学,去摸索,就一定能让这个神奇的小兵乖乖听我们的话,为我们干好多好多的事情呢!难道不是吗?哈哈!。
欧姆龙cp1h ini指令

欧姆龙CP1H是一种可编程控制器(PLC),其指令集包括一系列用于控制和监视输入/输出信号的指令。
欧姆龙CP1H的指令集通常包括以下类型的指令:
1. 逻辑运算指令:用于对输入信号进行逻辑运算,如AND、OR、XOR等。
2. 算术运算指令:用于对数字进行加、减、乘、除等运算。
3. 移位和循环指令:用于对数字进行移位和循环操作。
4. 计时和计数指令:用于对时间进行计时和计数操作。
5. 通讯指令:用于与其他设备进行通讯。
6. 输入和输出指令:用于控制输入和输出信号。
欧姆龙CP1H的指令集可能会根据具体的型号和配置有所不同。
如果您需要了解欧姆龙CP1H的具体指令集,建议您参考欧姆龙官方网站或相关文档。
欧姆龙cmp指令用法
欧姆龙cmp指令用法
欧姆龙CMP指令是一种非常常用的指令,它可以用于比较两个数的大小关系,并根据比较结果进行不同的操作。
本文将介绍欧姆龙CMP指令的用法及注意事项。
欧姆龙CMP指令的语法格式为“CMP A, B”,其中A和B可以是寄存器、直接操作数或间接操作数。
当执行该指令时,CPU会将A和B的值进行比较,并根据比较结果设置标志寄存器的值。
如果A>B,则设置ZF(零标志位)为0,CF(进位标志位)为0,SF(符号标志位)为0;如果A<B,则设置ZF为0,CF为1,SF为1;如果A=B,则设置ZF为1,CF为0,SF为0。
欧姆龙CMP指令通常用于条件转移指令中,根据比较结果进行跳转或不跳转。
例如,可以使用“JG”指令来实现“大于”条件下的跳转,“JL”指令来实现“小于”条件下的跳转,“JE”指令来实现“等于”条件下的跳转等。
注意事项:
1. 在使用欧姆龙CMP指令时,要注意操作数的类型和大小。
如果操作数是寄存器,则应注意寄存器的大小和对齐方式;如果操作数是直接或间接操作数,则应注意数据类型和内存地址的对齐方式。
2. 在条件转移指令中使用欧姆龙CMP指令时,要注意跳转的条件和跳转的目标地址。
3. 在使用欧姆龙CMP指令时,要注意操作数的取值范围,避免出现溢出或越界等错误。
4. 在程序设计中,要注意CMP指令的效率和可靠性,避免过度使用或滥用该指令。
欧姆龙PLC功能指令汇总
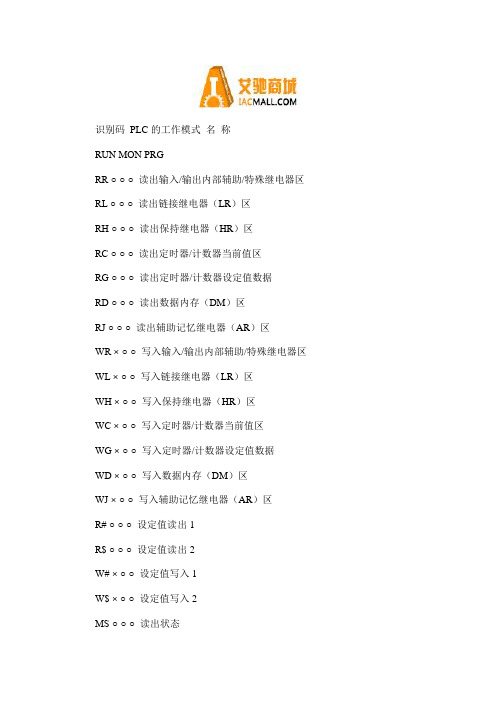
识别码PLC的工作模式名称RUN MON PRGRR ○ ○ ○ 读出输入/输出内部辅助/特殊继电器区RL ○ ○ ○ 读出链接继电器(LR)区RH ○ ○ ○ 读出保持继电器(HR)区RC ○ ○ ○ 读出定时器/计数器当前值区RG ○ ○ ○ 读出定时器/计数器设定值数据RD ○ ○ ○ 读出数据内存(DM)区RJ ○ ○ ○ 读出辅助记忆继电器(AR)区WR × ○ ○ 写入输入/输出内部辅助/特殊继电器区WL × ○ ○ 写入链接继电器(LR)区WH × ○ ○ 写入保持继电器(HR)区WC × ○ ○ 写入定时器/计数器当前值区WG × ○ ○ 写入定时器/计数器设定值数据WD × ○ ○ 写入数据内存(DM)区WJ × ○ ○ 写入辅助记忆继电器(AR)区R# ○ ○ ○ 设定值读出1R$ ○ ○ ○ 设定值读出2W# × ○ ○ 设定值写入1W$ × ○ ○ 设定值写入2MS ○ ○ ○ 读出状态CS ○ ○ ○ 写入状态MF ○ ○ ○ 读出故障信息KS × ○ ○ 强制置位KR × ○ ○ 强制复位FK × ○ ○ 多点强制置位/复位KC × ○ ○ 解除强制置位/复位MM ○ ○ ○ 读出机种码TS ○ ○ ○ 测试RP ○ ○ ○ 读出程序WP × × ○ 写入程序QQ ○ ○ ○ 复合命令XZ ○ ○ ○ 放弃(仅命令)** ○ ○ ○ 初始化(仅命令)IC - - - 命令未定义错误(仅响应)艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
欧姆龙编程指令

编程指令顺序输入指令顺序输出指令顺序输出指令定时器和计数器指令比较指令数据传送指令指令助记符装载LD装载非LD NOT与AND与非AND NOT或OR或非OR NOT与装载AND LD或装载OR LD非NOT条件ON UP条件OFF DOWN指令助记符输出OUT输出非OUT NOT保持KEEP上升沿微分DIFU下降沿微分DIFD置位SET复位RSET多位置位SETA多位复位RSTA单一位置位SETB单一位复位RSTB指令助记符结束END空操作NOP联锁IL联锁解除ILC多联锁区别保持MILH 多联锁区别释放MILR多联锁解除MILC跳转JMP跳转结束JME条件跳转CJPFOR循环FOR循环终止BREAK下一个循环NEXT指令助记符定时器TIM编辑指令数据移位指令递增/递减指令四则运算指令转换指令逻辑指令特殊算术指令特殊算术指令表格数据处理指令数据控制指令指令助记符移位寄存器SFT可逆移位寄存器SFTR 字移位WSFT算术左移ASL算术右移ASR循环左移ROL循环右移ROR一个数字左移SLD一个数字右移SRD左移N位NASL双字左移N位NSLL 右移N位NASR双字右移N位NSRL 指令助记符二进制递增++双字二进制递增++L 二进制递减--双字二进制递减--LBCD递增++B双字BCD递增++BLBCD递减--B双字BCD递减--BL指令助记符无进位带符号二进制加法+无进位带符号双字二进制加法+L 有进位带符号二进制加法+C有进位带符号双字二进制加法+CL 无进位BCD加法+B无进位双字BCD加法+BL有进位BCD加法+BC有进位双字BCD加法+BCL无进位带符号二进制减法-无进位带符号双字二进制减法-L 有进位带符号二进制减法-C有进位带符号双字二进制减法-CL 无进位BCD减法-B无进位双字BCD减法-BL有进位BCD减法-BC有进位双字BCD减法-BCL带符号二进制乘法*带符号双字二进制乘法*LBCD乘法*B双字BCD乘法*BL带符号二进制除法/带符号双字二进制除法/LBCD除法/B双字BCD除法/BL指令助记符BCD→二进制BIN双字BCD→双字二进制BINL二进制→BCD BCD双字二进制→双字BCD BCDL二进制求补NEG数据译码MLPX数据编码DMPXASCⅡ转换码ASCASCⅡ→HEX HEX指令助记符逻辑与ANDW双字逻辑与ANDL逻辑或ORW双字逻辑或ORWL异或XORW双字异或XORL求补COM双字求补COML指令助记符算术处理APR位计数器BCNT指令助记符浮点数→16位FIX浮点数→32位FIXL16位→浮点数FLT32位→浮点数FLTL浮点数加法+F浮点数减法-F浮点数除法/F浮点数乘法*F浮点符号比较LD, AND, OR+=FLD, AND, OR+<>FLD, AND, OR+<FLD, AND, OR+<=FLD, AND, OR+>FLD, AND, OR+>=F浮点数→ASCⅡ FSTR ASCⅡ→浮点数FVAL指令助记符交换字节SWAP帧校验和FCS指令助记符带自调整的PID控制PIDAT 时间比例输出TPO标度SCL标度2 SCL2标度3 SCL3平均值AVG子程序指令中断控制指令高速计数器和脉冲输出指令步指令I/O单元指令串行通信指令时钟指令故障诊断指令其他指令指令助记符子程序调用SBS子程序进入SBN子程序返回RET指令助记符设置中断屏蔽MSKS清除中断CLI禁止中断DI允许中断EI指令助记符模式控制INI高速计数器当前值读取PRV 比较表载入CTBL速度输出SPED设置脉冲PULS脉冲输出PLS2加速度模式ACC原点搜索ORG可变占空比系数脉冲PWM 指令助记符步定义STEP步启动SNXT指令助记符I/O刷新IORF7段译码SDEC数字开关输入DSW矩阵输入MTR7段显示输出7SEG指令助记符发送TXD接收RXD指令助记符日历加法CADD日历减法CSUB时钟调整DATE指令助记符故障报警FAL严重故障报警FALS指令助记符设置进位STC清除进位CLC延长最大循环时间WDT TIMX计数器CNTCNTX高速定时器TIMHTIMHX1MS定时器TMHHTMHHX累计定时器TTIMTTIMX长时间定时器TIMLTIMLX可逆计数器CNTRCNTRX定时器/计数器复位CNR指令助记符输入比较指令(无符号)LD,AND,OR+=LD,AND,OR+<> LD,AND,OR+<LD,AND,OR+<=LD,AND,OR+>LD,AND,OR+>=输入比较指令(双字长,无符号) LD,AND,OR+=+L LD,AND,OR+<>+L LD,AND,OR+<+L LD,AND,OR+<=+L LD,AND,OR+>+L LD,AND,OR+>=+L 输入比较指令(带符号)LD,AND,OR+=+S LD,AND,OR+<>+S LD,AND,OR+<+S LD,AND,OR+<=+S LD,AND,OR+>+S LD,AND,OR+>=+S 输入比较指令(双字长,带符号) LD,AND,OR+=+SL LD,AND,OR+<>+SL LD,AND,OR+<+SL LD,AND,OR+<=+SL LD,AND,OR+>+SL LD,AND,OR+>=+SL 时间比较指令=DT<>DT<DT>DT>=DT比较CMP双字比较CMPL带符号二进制比较CPS双字长带符号二进制比较CPSL 表格比较TCMP无符号块比较BCMP区域范围比较ZCP双区域范围比较ZCPL指令助记符传送MOV双字长传送MOVL传送非MVN传送位MOVB数字传送MOVD多位传送XFRB块传送XFER块置位BSET数据交换XCHG单字分配DIST数据收集COLL。
欧姆龙相对定位和绝对定位指令
欧姆龙相对定位和绝对定位指令欧姆龙相对定位和绝对定位指令欧姆龙相对定位和绝对定位指令是工业自动化中常用的两种定位控制方式。
相对定位是相对于当前位置移动的定位方式,而绝对定位是按照绝对坐标移动的定位方式。
在工业自动化控制系统中,掌握这两种定位方式对于提高生产效率和精度非常重要。
本文将深入探讨欧姆龙相对定位和绝对定位指令的原理、应用和优缺点,帮助读者全面理解和掌握这两种定位方式。
1. 欧姆龙相对定位指令欧姆龙PLC控制系统中的相对定位指令通常采用“MOV”命令进行控制。
在PLC编程中,通过设定相对移动的距离和速度参数,可以实现相对定位的控制。
相对定位的优点是操作简单,适用于多次进行相同相对移动的应用场景。
但缺点是对于需要精确到达目标位置的应用场合,由于相对定位是基于当前位置移动的,可能存在积累误差导致定位不准确的情况。
2. 欧姆龙绝对定位指令欧姆龙PLC控制系统中的绝对定位指令通常采用“MOVABS”命令进行控制。
在PLC编程中,通过设定目标位置的绝对坐标,可以实现按照绝对坐标移动的定位控制。
绝对定位的优点是能够精确到达目标位置,适用于对定位精度要求较高的应用场景。
但缺点是操作相对复杂,不适用于需要频繁改变目标位置的应用场合。
3. 应用和优缺点比较在实际工业自动化应用中,相对定位和绝对定位各有其适用的场景。
相对定位适用于需要多次进行相同相对移动的应用场合,操作简单,但精度有限;绝对定位适用于对定位精度要求较高的应用场合,能够实现精确到达目标位置,但操作相对复杂。
合理选择相对定位和绝对定位方式,可以根据具体应用场景来决定,以达到最佳的控制效果。
4. 个人观点和总结对于欧姆龙相对定位和绝对定位指令,我认为在实际应用中需要根据具体情况来选择合适的定位方式。
相对定位适用于操作简单的场景,而绝对定位适用于对定位精度要求较高的场景。
在实际应用中,可以根据控制要求来灵活选择相对定位和绝对定位方式,以实现最佳的控制效果。
欧姆龙finstcp指令
欧姆龙finstcp指令什么是欧姆龙FINSTCP指令?欧姆龙FINSTCP指令是欧姆龙公司开发的一种通信指令协议,用于在工业自动化系统中实现设备间的数据传输和通信。
它是一种基于以太网的通信协议,使用TCP/IP协议和以太网作为物理层和传输层的通信手段,能够为工控设备提供快速、稳定的通信服务。
欧姆龙FINSTCP指令广泛应用于工业自动化领域,特别是在机械制造、自动化生产线和工厂自动化控制系统等方面。
它能够与欧姆龙PLC(可编程逻辑控制器)进行通信,并支持多种通信方式,如读写寄存器、读写输入输出点、读写数据表等。
欧姆龙FINSTCP指令的特点:1. 高速性:使用以太网作为通信手段,数据传输速度快,能够实现实时控制和监控。
2. 稳定性:通过TCP/IP协议进行数据传输,具有较高的稳定性和可靠性,能够保证数据的准确性和完整性。
3. 灵活性:支持多种通信方式和协议,可以按需进行配置和调整,满足不同场景的通信需求。
4. 安全性:支持数据加密和认证等安全机制,能够确保通信的安全性,防止数据泄露和非法访问。
欧姆龙FINSTCP指令的应用场景:1. 机械制造:在机械制造过程中,不同设备之间需要进行数据的传输和控制,使用欧姆龙FINSTCP指令可以实现设备间的实时通信和数据交互,提高机械设备的生产效率和稳定性。
2. 自动化生产线:在自动化生产线上,各个生产单元需要实现数据的共享和通信,使用欧姆龙FINSTCP指令可以方便地实现数据的采集、传输和监控,提高生产线的运行效率和可管理性。
3. 工厂自动化控制系统:在工厂自动化控制系统中,不同的控制设备需要进行数据的交互和协调,使用欧姆龙FINSTCP指令可以实现设备间的数据互联和控制命令的传输,实现工厂的自动化控制和管理。
如何使用欧姆龙FINSTCP指令进行通信?使用欧姆龙FINSTCP指令进行通信需要按照一定的步骤进行配置和操作,主要包括以下几个方面:1. 网络配置:首先需要对以太网进行配置,包括IP地址、子网掩码、网关等参数的设置,确保设备能够正常连接和通信。
欧姆龙PLC指令
4指令助记符:按时器TIM5编辑指令:数据移位指令,递增/递减指令,四那么运算指令,转换指令,逻辑指令,特殊算术指令,表格数据处置指令,数据操纵指令。
6指令助记符移位寄放器SFT可逆移位寄放器SFTR字移位WSFT算术左移ASL算术右移ASR循环左移ROL循环右移ROR一个数字左移SLD一个数字右移SRD左移N位NASL双字左移N位NSLL右移N位NASR双字右移N位NSRL7指令助记符二进制递增++双字二进制递增++L二进制递减--双字二进制递减--LBCD递增++B,双字BCD递增++BL,BCD递减--B,双字BCD递减--BL8指令助记符无进位带符号二进制加法+,无进位带符号双字二进制加法+L,有进位带符号二进制加法+C,有进位带符号双字二进制加法+CL,无进位BCD加法+B,无进位双字BCD加法+BL,有进位BCD加法+BC,有进位双字BCD加法+BCL,无进位带符号二进制减法-无进位带符号双字二进制减法-L,有进位带符号二进制减法-C,有进位带符号双字二进制减法-CL,无进位BCD减法-B,无进位双字BCD减法-BL,有进位BCD减法-BC 有进位双字BCD减法-BCL,带符号二进制乘法*,带符号双字二进制乘法*L,BCD乘法*B,双字BCD乘法*BL,带符号二进制除法/,带符号双字二进制除法/L,BCD除法/B双字BCD除法/BL9指令助记符BCD→二进制BIN,双字BCD→双字二进制BINL,二进制→BCD BCD双字二进制→双字BCD BCDL二进制求补NEG,数据译码MLPX,数据编码DMPX,ASCⅡ转换码ASC,ASCⅡ→HEX HEX10指令助记符逻辑与ANDW,双字逻辑与ANDL,逻辑或ORW,双字逻辑或ORWL,异或XORW双字异或XORL,求补COM,双字求补COML11指令助记符算术处置APR,位计数器BCNT12指令助记符浮点数→16位FIX,浮点数→32位FIXL,16位→浮点数FLT,32位→浮点数FLTL浮点数加法+F,浮点数减法-F,浮点数除法/F,浮点数乘法*F浮点符号比较LD, AND, OR+=FLD, AND, OR+<>FLD, AND, OR+<FLD, AND, OR+<=FLD, AND, OR+>FLD, AND, OR+>=F浮点数→ASCⅡFSTRASCⅡ→浮点数FVAL12指令助记符互换字节SWAP,帧校验和FCS13指令助记符带自调整的PID操纵PIDAT,时刻比例输出TPO,标度SCL,标度2 SCL2,标度3 SCL3平均值AVG14指令助记符子程序挪用SBS,子程序进入SBN,子程序返回RET,设置中断屏蔽MSKS,清除中断CLI,禁止中断DI,许诺中断EI,模式操纵INI,高速计数器当前值读取PRV比较表载入CTBL,速度输出SPED,设置脉冲PULS,脉冲输出PLS2,加速度模式ACC原点搜索ORG,可变占空比系数脉冲PWM15指令助记符步概念STEP,步启动SNXT,I/O刷新IORF,7段译码SDEC,数字开关输入DSW矩阵输入MTR,7段显示输出7SEG发送TXD,接收RXD,日历加法CADD,日历减法CSUB,时钟调整DATE,故障报警FAL 严峻故障报警FALS,设置进位STC,清除进位CLC,延长最大循环时刻WDT TIMX计数器:CNT,CNTX高速按时器:TIMH,TIMHX1MS按时器:TMHH,TMHHX累计按时器:TTIM,TTIMX长时刻按时器:TIML,TIMLX可逆计数器:CNTR,CNTRX按时器/计数器复位:CNR,CNRX 16指令助记符输入比较指令(无符号)LD,AND,OR+=LD,AND,OR+<>LD,AND,OR+<LD,AND,OR+<=LD,AND,OR+>LD,AND,OR+>=输入比较指令(双字长,无符号)LD,AND,OR+=+LLD,AND,OR+<>+LLD,AND,OR+<+LLD,AND,OR+<=+LLD,AND,OR+>+LLD,AND,OR+>=+L输入比较指令(带符号)LD,AND,OR+=+SLD,AND,OR+<>+SLD,AND,OR+<+SLD,AND,OR+<=+SLD,AND,OR+>+SLD,AND,OR+>=+S输入比较指令(双字长,带符号)LD,AND,OR+=+SLLD,AND,OR+<>+SLLD,AND,OR+<+SLLD,AND,OR+<=+SLLD,AND,OR+>+SLLD,AND,OR+>=+SL时刻比较指令=DT<>DT<DT<=DT>DT>=DT比较CMP,双字比较CMPL,带符号二进制比较CPS,双字长带符号二进制比较CPSL表格比较TCMP,无符号块比较BCMP,区域范围比较ZCP,双区域范围比较ZCPL17指令助记符传送MOV,双字长传送MOVL,传送非MVN,传送位MOVB,数字传送MOVD多位传送XFRB,块传送XFER,块置位BSET,数据互换XCHG,单字分派DIST数据搜集COLL6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CPM2AH日的一般规格注
注: 1. CPU单元上的服务电源24V DC只能给输人设备使用。
(不能用来驱动输出设备)
2.如果服务电源的电流超过额定电流值,或者有短路的情况,则服务电源电压将下降或PC操作停止。
3.若安装了CPM 1A .MAD01∕CPM l A-MADl1∕CPM 1A-TS102∕CPMIA-DA041单元.CPU单元上的服务电源24V DC的电流不应超过200MA。
4.若安装了2或3个CPM l A-DA041单元,该服务电源不能使用。
CPM2AH的I∕O规格
注:在PC设置中,能设置输入时间常数1、2、3、5、10、20、40或80ms。
高速计数器输入
如下表所示,输入位IN00000~-IN00002可作为高速计数器输入。
相位差输人模
中断输入
输入位IN00003~IN00006可被用于作中断输入(中断输入模式或计数模式)和快速响应输入。
这些输入的最小脉宽为0.05ms。
CPM2AH指令
CPM2AH和CPM2C支持119条基本指令和特殊指令
梯形图指令
数据传送命令
位控制指令
递增∕递减指令
顺序控制指令
定时器∕计数器指令
运算指令
注:1.扩展指令带缺省功能代码
2.CPM 1A不支持这些指令
比较指令
转换指令
中断指令
脉冲控制指令
脉冲输出控制指令
表格数据操作指令
I∕O单元指令
通信指令
步进指令
数据控制指令
逻辑指令
故障诊断指令
特殊运算命令
显示功能指令
子程序指令
进位标志指令
注:1.扩展指令带缺省功能代码
2.CPM1A不支持这些指令
3.指令在CPM2A中得到改进
模拟量I/O单元
CPM2AH的性能规格。