浅谈“弦的中点坐标与直线参数方程”的关系
参数方程和直角坐标转换的关系

参数方程和直角坐标转换的关系在数学中,参数方程和直角坐标是两种常见的表示平面上点的方法。
参数方程用一对参数来描述点的位置,而直角坐标则使用 x 和 y 坐标来表示。
这两种表示方法之间存在一定的关系,可以相互转换。
本文将介绍参数方程和直角坐标之间的转换关系,并给出一些例子来加深理解。
参数方程和直角坐标的定义参数方程是指使用参数表示点的位置。
在平面上,一个点的参数方程可以写成x = f(t) 和 y = g(t)。
其中,t 是参数,f(t) 和 g(t) 是关于 t 的函数。
通过给定不同的 t 值,我们可以获得不同的点坐标 (x, y)。
直角坐标是指使用 x 和 y 坐标来表示点的位置。
在平面上,一个点的直角坐标表示为 (x, y),其中 x 和 y 分别代表点在水平和垂直方向上的位置。
从参数方程到直角坐标要将参数方程转换为直角坐标,我们只需将参数方程中的参数用具体的值替代,并计算出相应的 x 和 y 坐标值。
例如,考虑一个参数方程 x = 2t + 1 和 y = 3t - 2。
我们可以选择 t = 0,计算出点的直角坐标为 (1, -2)。
同样地,选择 t = 1 可得到直角坐标 (3, 1)。
通过给定不同的 t 值,我们可以获得参数方程对应的多个点,并确定它们在直角坐标系中的位置。
从直角坐标到参数方程要将直角坐标转换为参数方程,则需要将直角坐标中的 x 和 y 值用参数来表示。
考虑一个直角坐标 (2, 3),我们可以将 x 和 y 分别用 t 表示,得到参数方程 x = t 和 y = t + 1。
在这个例子中,我们将直角坐标的 x 和 y 值分别赋值给参数 t,从而得到了参数方程。
需要注意的是,并不是所有的直角坐标都可以转换为参数方程。
有时候,直角坐标中的 x 和 y 值之间可能不存在简单的函数关系,因此无法用参数方程来表示。
示例以下是一个具体的示例,展示了如何根据给定的参数方程和直角坐标相互转换。
坐标系与参数方程知识点

坐标系与参数方程知识点在数学中,坐标系与参数方程是两个重要且密切相关的概念。
坐标系是我们描述点的位置和相互关系的工具,而参数方程则是一种表示曲线或曲面的常用方法。
让我们来深入了解这两个知识点,它们的应用领域和一些实际问题的解决方法。
一、坐标系在平面几何学和空间几何学中,坐标系用于表示点的位置。
常用的坐标系有直角坐标系和极坐标系。
1. 直角坐标系直角坐标系是最常见的坐标系之一,由两条相互垂直的直线组成。
通常,水平直线被称为x轴,垂直直线被称为y轴。
任何点P都可以通过其与这两条轴的交点来表示,用一个有序数对(x, y)表示。
其中,x 称为横坐标,y称为纵坐标。
这种表示方法可以简化许多几何问题的求解,如计算两点之间的距离、判断点是否在某一区域内等。
2. 极坐标系极坐标系是另一种常用的坐标系,用于描述平面上的点。
与直角坐标系不同,它使用极径和极角来表示点的位置。
极径表示点到坐标原点的距离,极角则表示点与正半轴的夹角。
在极坐标系下,点的坐标用一个有序数对(r, θ)表示。
这种坐标系在描述圆形运动、天文学等领域具有重要应用。
二、参数方程参数方程是一种常用的表示曲线或曲面的方法,它使用一个或多个参数来描述点的位置。
通常,参数方程将x和y(或x、y、z)用一个或多个参数t表示。
1. 二维参数方程对于二维参数方程,曲线上的点可以用参数t与x、y的关系表示。
例如,对于抛物线y = x^2,我们可以使用参数方程x = t和y = t^2来表示。
通过改变参数t的值,我们可以得到这条曲线上的各个点。
参数方程的优势在于它可以描述一些传统的直角坐标系难以表示的曲线,如椭圆、双曲线等。
此外,参数方程还可以用于描述运动轨迹、弹道轨迹等。
2. 三维参数方程三维参数方程与二维参数方程类似,不同之处在于曲面上的点需要用参数t与x、y、z的关系表示。
例如,对于球体的参数方程x = r *sinθ * cosφ,y = r * sinθ * sinφ,z = r * cosθ,其中r、θ和φ是参数,描述了点与球心的关系。
直线的参数方程怎么求直线的参数方程及其推导过程直线的参数方程t的意义
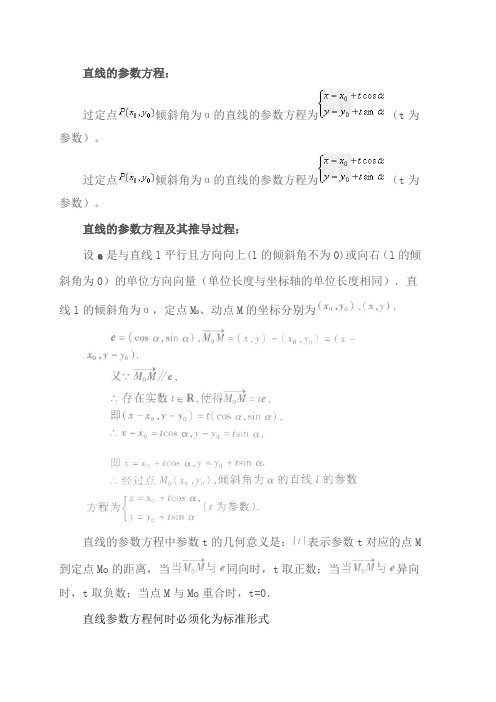
直线的参数方程:过定点倾斜角为α的直线的参数方程为(t为参数)。
过定点倾斜角为α的直线的参数方程为(t为参数)。
直线的参数方程及其推导过程:设e是与直线l平行且方向向上(l的倾斜角不为0)或向右(l的倾斜角为0)的单位方向向量(单位长度与坐标轴的单位长度相同).直线l的倾斜角为α,定点M0、动点M的坐标分别为直线的参数方程中参数t的几何意义是:表示参数t对应的点M 到定点Mo的距离,当同向时,t取正数;当异向时,t取负数;当点M与Mo重合时,t=0.直线参数方程何时必须化为标准形式在求解直线与圆相交得到的弦的长度问题时,可以采用的思路很多:①利用几何方法,即利用弦心距、半弦长、半径组成的Rt△Rt△来求解决;②弦长公式,即|AB|=1+k2−−−−−√⋅|x1−x2||AB|=1+k2⋅|x1−x2|来求解;③利用直线的参数方程的参数的几何意义来求解;从平面解析几何的角度来看,平面上的直线就是由平面直角坐标系中的一个二元一次方程所表示的图形。
求两条直线的交点,只需把这两个二元一次方程联立求解,当这个联立方程组无解时,两直线平行;有无穷多解时,两直线重合;只有一解时,两直线相交于一点。
常用直线向上方向与 X 轴正向的夹角(叫直线的倾斜角)或该角的正切(称直线的斜率)来表示平面上直线(对于X轴)的倾斜程度。
可以通过斜率来判断两条直线是否互相平行或互相垂直,也可计算它们的交角。
直线与某个坐标轴的交点在该坐标轴上的坐标,称为直线在该坐标轴上的截距。
直线在平面上的位置,由它的斜率和一个截距完全确定。
在空间,两个平面相交时,交线为一条直线。
因此,在空间直角坐标系中,用两个表示平面的三元一次方程联立,作为它们相交所得直线的方程。
直线的参数方程ppt课件
返回首页
下一页
5.化直线l的参数方程
x=-3+t, y=1+ 3t
(t为参数)为普通方程,并求倾斜角,
说明|t|的几何意义.
上一页
返回首页
下一页
【解】 由xy= =- 1+3+3tt, 消去参数t,得
直线l的普通方程为 3x-y+3 3+1=0.
故k= 3=tan α,即α=π3,
几何意义为|
→ M0M
|=4,且
→ M0M
与e方向相反(即点M在直线l上点M0的左下
方).
上一页
返回首页
下一页
1.一条直线可以由定点M0(x0,y0),倾斜角α(0≤α<π)惟一确定,直线上
的动点M(x,y)的参数方程为
x=x0+tcos y=y0+tsin
α, α
(t为参数),这是直线参数方程的
上一页
返回首页
下一页
【解析】 将xy= =12- +23tt 化为y=-32x+72, ∴斜率k1=-32, 显然k=0时,直线4x+ky=1与上述直线不垂直, ∴k≠0,从而直线4x+ky=1的斜率k2=-4k. 依题意k1k2=-1,即-4k×-32=-1, ∴k=-6. 【答案】 -6
上一页
θ, θ
(θ为参数)交于A,B两点,求|PA|·|PB|.
上一页
返回首页
下一页
【解】 (1)直线l的参数方程为
x=-3+tcos56π=-3- 23t, y=3+tsin56π=3+2t
(t为参数).
上一页
返回首页
下一页
(2)把曲线C的参数方程中参数θ消去,得4x2+y2-16=0. 把直线l的参数方程代入曲线C的普通方程中,得 4-3- 23t2+3+12t2-16=0, 即13t2+4(3+12 3)t+116=0. 由t的几何意义,知 |PA|·|PB|=|t1·t2|, 故|PA|·|PB|=|t1·t2|=11136.
直角坐标系与参数方程
直角坐标系与参数方程1. 引言直角坐标系和参数方程是数学中常用的两种描述点、线、曲面等几何对象的方式。
直角坐标系是我们通常使用的坐标系,由x、y、z三个坐标轴组成。
而参数方程是用参数表示点的坐标,通过设定参数的范围,可以绘制出特定曲线或曲面。
在本文中,我们将对直角坐标系和参数方程进行详细介绍,并比较它们在几何描述中的优缺点。
2. 直角坐标系2.1 坐标轴直角坐标系由三条相互垂直的坐标轴组成,分别是x轴、y轴和z轴。
x轴与y轴的交点称为原点,通常记为O。
我们可以用(x, y, z)表示直角坐标系中的一个点P,其中x、y、z分别是点P在x轴、y轴和z轴上的投影长度。
2.2 坐标表示在直角坐标系中,我们可以通过两点之间的距离和角度来计算点的坐标。
例如,对于二维坐标系,给定点P的极坐标表示(r, θ),其中r是点P到原点O的距离,θ是向量OP与x轴的夹角。
对于三维坐标系,我们可以使用球坐标或柱坐标来表示点的位置。
球坐标表示为(r, θ, φ),其中r是点P到原点O的距离,θ是向量OP在xy平面上的投影与x轴的夹角,φ是向量OP与z轴的夹角。
柱坐标则表示为(r, θ, z),其中r是点P在xy平面上到原点O的距离,θ是向量OP与x轴的夹角,z是点P在z轴上的投影长度。
2.3 坐标转换在直角坐标系中,我们可以通过坐标之间的转换关系,在不同的坐标系之间进行转换。
例如,球坐标和直角坐标的转换公式为:x = r * sinθ * cosφy = r * sinθ * sinφz = r * cosθ通过这些转换公式,我们可以方便地在直角坐标系中描述各类点、线、曲面等几何对象。
3. 参数方程3.1 参数方程的定义参数方程是用参数表示点的坐标的方式。
给定参数t的范围,我们可以通过参数方程来描述出一条曲线或曲面。
参数方程可以是二维的,用于描述曲线,也可以是三维的,用于描述曲面。
3.2 参数方程与解析几何参数方程与直角坐标系相比,更加灵活且简洁。
坐标系与参数方程知识点归纳

坐标系与参数方程知识点一、极坐标(方程)与直角坐标(方程)的相互转化:),(θρP 与直角坐标),(y x P222y x +=ρ θρcos =x θρsin =y xy =θtan 二、参数方程1.经过点),(000y x M 倾斜角为α的直线)(tan :00x x y y l -=-α的参数方程为(直线参数方程标准型:定点和倾斜角)t t y y t x x (,sin cos 00⎩⎨⎧+=+=αα为参数) 特别注意: ||t 表示直线上任意一点),(y x M 到0M 的距离,即||||0MM t =,当M 在0M 上方时,0>t ,当M 在0M 下方时,0<t .2.圆222)()(:r b y a x C =-+-(圆心为),(b a C 半径为r )的参数方程为ααα(,sin cos ⎩⎨⎧+=+=r b y r a x 为参数) 3.椭圆1:2222=+by a x C 的参数方程为ϕϕϕ(,sin cos ⎩⎨⎧==b y a x 为参数) 4.抛物线)0(2:2>=p px y C 的参数方程为t pt y pt x (,222⎩⎨⎧==为参数)三、直线l 与曲线C 相交于两点),(),,(2211y x B y x A 问题 ①将直线l 化为参数方程的标准型(过定点0M 和倾斜角);②曲线C 使用普通方程;③将直线l 的参数方程带入曲线C 的普通方程,得到关于t 的一元二次方程02=++c bt at ;④设),(),,(2211y x B y x A 对应的参数分别为21,t t ,由韦达定理得⎪⎪⎩⎪⎪⎨⎧=⋅-=+a c t t ab t t 2121 (021>⋅t t ,21,t t 同号,021<⋅t t ,21,t t 异号,再根据21t t +的正负性来判断) (1)若求||||00BM AM +,则求出21,t t ,则||||||||2100t t BM AM +=+ (根据21,t t 的正负性去掉绝对值即可)(2)若求||||00BM AM ⋅,则||||||2100t t BM AM ⋅=⋅ (3)若求弦长||AB ,则21221214)(||||t t t t t t AB ⋅-+=-=(4)若0M 为线段AB 的中点,求直线l 方程令021=+t t ,即可求出直线l 的斜率,带入直线l 的点斜式方程)(tan 00x x y y -=-α,化简记得直线l 方程.四、有关距离问题1.常规方法(化为普通方程,利用两点的距离公式或者弦长公式求解):212212)()(||y y x x AB -+-=, )4)(1||212212x x x x k AB -++=2.极径思想:当直线通过原点时,直线的倾斜角即为极角,带入极坐标方程即可求出极径.3.直线参数方法思想(要注意直线参数方程必须是通过倾斜角和定点所得): ||t 表示直线上任意一点),(y x M 到0M 的距离,即||||0MM t =,当M 在0M 上方时,0>t ,当M 在0M 下方时,0<t .。
直角坐标方程和参数方程的关系公式

直角坐标方程和参数方程的关系公式直角坐标系和参数方程是描述平面曲线的两种常用方法。
直角坐标方程以x和y轴上的坐标表示,而参数方程则使用参数t表示曲线上的点。
本文将介绍直角坐标方程和参数方程之间的关系公式。
1. 直角坐标方程直角坐标方程是用x和y轴上的坐标表示平面曲线。
以一条曲线C为例,其直角坐标方程通常表示为y=f(x),其中f(x)是关于x的函数表达式。
在直角坐标系中,(x,y)表示曲线上的一个点。
2. 参数方程参数方程是使用参数t来表示曲线上的点,以t为自变量,x和y为因变量。
参数方程表示为:x=g(t)y=ℎ(t)其中g(t)和ℎ(t)分别是x和y的函数表达式。
参数方程常用于描述具有多个分支或孤立点的曲线。
通过改变参数t的值,可以得到曲线上的不同点。
3. 直角坐标方程和参数方程的关系直角坐标方程和参数方程之间存在一定的关系。
通过一定的变换,我们可以互相将一个方程转换为另一个方程。
3.1 从直角坐标方程到参数方程当我们已知一个曲线的直角坐标方程y=f(x)时,我们可以通过以下步骤将其转换为参数方程:1.令x=t,其中t是参数;2.将x=t代入直角坐标方程中,得到y=f(t);3.因此,该曲线的参数方程为x=t,y=f(t)。
通过这个转换,我们将直角坐标方程转换为了参数方程。
3.2 从参数方程到直角坐标方程当我们已知一个曲线的参数方程x=g(t),y=ℎ(t)时,我们可以通过以下步骤将其转换为直角坐标方程:1.解出参数t,得到x=g−1(y);2.将x=g−1(y)代入参数方程中的y=ℎ(t),得到y=ℎ(g−1(y))。
通过这个转换,我们将参数方程转换为了直角坐标方程。
4. 示例下面通过一个实例来演示直角坐标方程和参数方程之间的转换。
例:将直角坐标方程y=x2转换为参数方程。
解:按照从直角坐标方程到参数方程的转换步骤:1.令x=t,其中t是参数;2.将x=t代入直角坐标方程中,得到y=t2;3.因此,该曲线的参数方程为x=t,y=t2。
直角坐标方程和参数方程的关系

直角坐标方程和参数方程的关系直角坐标系和参数方程是数学中常用的表示方法,用于描述平面上的曲线。
直角坐标方程使用x和y的关系来表示曲线,而参数方程使用参数t的变化来表示曲线。
本文将探讨直角坐标方程和参数方程之间的关系。
直角坐标方程直角坐标方程是最常见的表示曲线的方法。
在直角坐标系中,我们使用x轴和y轴来表示平面上的点。
直角坐标方程使用x和y的关系来描述曲线,形式通常为y=f(x),其中f(x)是一个函数。
例如,考虑直角坐标方程y=x2。
这是一个经典的二次函数,表示了平面上的一条抛物线。
通过给定x的值,我们可以计算得到对应的y值,从而确定曲线上的点。
参数方程参数方程是另一种表示曲线的方法。
在参数方程中,我们使用参数t的变化来表示曲线上的点。
参数方程通常分别给出x和y的关系,形式为x=f(t)和y=g(t),其中f(t)和g(t)是两个关于t的函数。
例如,考虑参数方程$x = \\cos(t)$和$y = \\sin(t)$。
这是一个经典的单位圆的参数方程。
通过给定t的值,我们可以计算得到对应的x和y值,从而确定曲线上的点。
直角坐标方程与参数方程的转换直角坐标方程和参数方程之间存在着一定的转换关系。
通过适当的变换,我们可以将一个方程转换为另一个方程。
从直角坐标方程到参数方程要将直角坐标方程转换为参数方程,我们需要引入一个新的参数t。
我们可以通过令x=f(t)和y=g(t),将直角坐标方程中的x和y表示为关于t的函数。
例如,考虑直角坐标方程y=x2。
要将其转换为参数方程,我们可以令x=t,那么y=t2。
因此,直角坐标方程y=x2可以转换为参数方程x=t和y=t2。
从参数方程到直角坐标方程要将参数方程转换为直角坐标方程,我们需要消除参数t。
我们可以通过将参数方程中的x和y用t的表达式表示,然后消去t,得到一个直角坐标方程。
例如,考虑参数方程$x = \\cos(t)$和$y = \\sin(t)$。
要将其转换为直角坐标方程,我们可以使用三角恒等式$\\sin^2(t) + \\cos^2(t) = 1$。