S7_200SMARTPLC的运动控制向导
S7-200 SMART PID控制配置向导

PID Wizard - PID向导Micro/WIN SMART提供了PID Wizard(PID指令向导),可以帮助用户方便地生成一个闭环控制过程的PID算法。
此向导可以完成绝大多数PID运算的自动编程,用户只需在主程序中调用PID向导生成的子程序,就可以完成PID控制任务。
PID向导既可以生成模拟量输出PID控制算法,也支持开关量输出;既支持连续自动调节,也支持手动参与控制。
建议用户使用此向导对PID编程,以避免不必要的错误。
建议用户使用较新的编程软件版本。
在新版本中的PID向导获得了改善。
PID向导编程步骤使用以下方法之一打开 PID 向导:●在Micro/WIN SMART中的工具菜单中选择PID向导:图1. 选择PID向导● 在项目树中打开“向导”文件夹,然后双击“PID”,或选择“PID”并按回车键。
图2. 选择PID向导第一步:定义需要配置的PID回路号在此对话框中选择要组态的回路。
最多可组态 8 个回路。
在此对话框上选择回路时,PID 向导左侧的树视图随组态该回路所需的所有节点一起更新。
图3. 选择需要配置的回路第二步:为回路组态命名可为回路组态自定义名称。
此部分的默认名称是“回路 x”,其中“x”等于回路编号。
图4. 为PID回路命名图5. 设置PID参数图5中定义了PID回路参数,这些参数都应当是实数:a.增益:即比例常数,默认值=1.00。
b.积分时间:如果不想要积分作用可以将该值设置很大(比如10000.0),默认值=10.00。
c.微分时间:如果不想要微分回路,可以把微分时间设为0 ,默认值=0.00。
d.采样时间:是PID控制回路对反馈采样和重新计算输出值的时间间隔,,默认值=1.00。
在向导完成后,若想要修改此数,则必须返回向导中修改,不可在程序中或状态表中修改。
注意:关于具体的PID参数值,每一个项目都不一样,需要现场调试来定,没有所谓经验参数。
图6. 设定PID输入过程变量a.指定回路过程变量 (PV) 如何标定。
西门子S7-200SMART PLC之间通过向导实现S7通讯
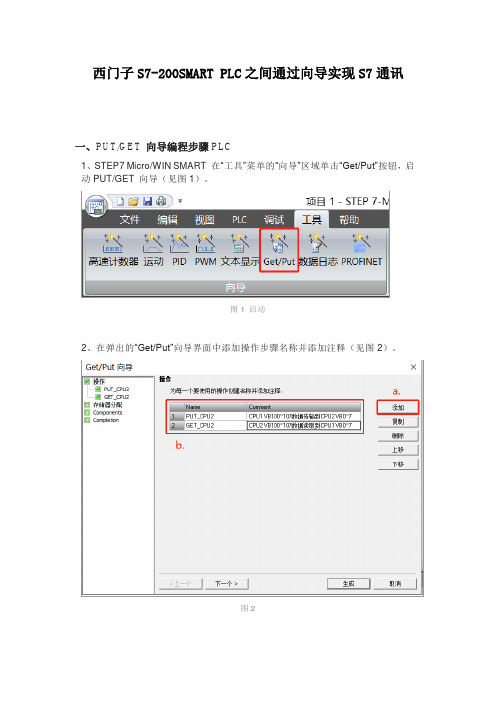
西门子S7-200SMART PLC之间通过向导实现S7通讯一、PUT/GET 向导编程步骤PLC动PUT/GET 向导(见图1)。
图1 启动2、在弹出的“Get/Put”向导界面中添加操作步骤名称并添加注释(见图2)。
图2a. 点击“添加”按钮,添加PUT/GET操作b. 为每个操作创建名称并添加注释3、定义PUT/GET操作(见图3、图4)。
图3 定义PUT 操作a. 选择操作类型,PUT或GETb. 通信数据长度c. 定义远程CPU的IP 地址d. 本地CPU 的通信区域和起始地址e. 远程CPU 的通信区域和起始地址图4 定义GET 操作a. 选择操作类型,PUT或GETb. 通信数据长度c. 定义远程CPU的IP 地址d. 本地CPU 的通信区域和起始地址e. 远程CPU 的通信区域和起始地址4、定义PUT/GET向导存储器地址分配(见图5)。
点击“建议”按钮向导会自动分配存储器地址。
需要确保程序中已经占用的地址、PUT/GET 向导中使用的通信区域与不能存储器分配的地址重复,否则将导致程序不能正常工作。
5、在 图 5中点击“生成”按钮将自动生成网络读写指令以及符号表。
只需用在主程序中调用向导所生成的网络读写指令即可(见图6)。
二、程序调试PLC图7)。
图7 程序监控与写入三、PUT/GET常见问题PLC1、S7-200SMART CPU以太网通信端口支持哪些通信协议,是否支持TCP、UDP 和ISOonTCP等开放式用户通信或ModbusTCP通信?S7-200 SMARTCPU以太网通信端口从V2.2固件支持TCP、UDP和ISOon TCP 等开放式用户通信及ModbusTCP通信。
2、S7-200SMART CPU标准型和紧凑型产品是否都支持GET/PUT通信?S7-200 SMART CPU 全系列产品都支持GET/PUT通信。
但是固件版本低于V2.0的产品不支持GET/PUT通信,CPU固件可以通过Micro SD卡进行升级。
西门子S7-200SmartPLC运动控制(四)运动控制编程介绍

西门子S7-200SmartPLC运动控制(四)运动控制编程介绍
各位老铁大家好,本章主要给大家讲解下如何使用SMART PLC编程软件进行运动控制编程,此章为本系列讲解最后一章,新加入的粉丝可以先阅读小编往期文章以便更好的理解小编所讲的内容,喜欢的朋友可以关注小编,给小编点个赞❤❤
为了使大家更好的理解本章的内容,小编已发布一个关于smart 编程软件基本使用方法的视频,大家可前往小编主页查阅。
一、如何打开运动控制面板以及配置基本参数并生成运动控制功能块
二、运动控制常用功能块使用方法讲解
图中为运动控制编程作了非常详细的讲解,有疑问的朋友可以留言,小编会一一回复。
模块五 S7-200 SMART PLC模拟量及运动控制

制
11位+符号位;电流模式的有效位为11位。
2019年12月16日星期一
重庆工业职业技术学院
S7-200 SMART PLC应用技术
(2)模拟量输出模块EM AQ02的端子及接线
哪
里
有
逻
辑
,
那
空端子
里
就
有
自
动
化
控
模拟量的类型有电压和电流两种,电压范围
制
只有-10~10V;电流范围只有0~20mA。
S7-200 SMART PLC应用技术
模块五 S7-200 SMART PLC 的模拟量模块及运动控制
重庆工业职业技术学院
S7-200 SMART PLC应用技术
哪
里
有
5.1 电热水炉温度控制系统
逻
目录
辑 ,
Contents
那 里
就
5.2 步进电机的正反转控制
有
自
动
化
控
制
2019/12/16
重庆工业职业技术学院
S7-200 SMART PLC应用技术
模拟量电流、电压信号根据模拟量仪表或设备线缆个数分成四线制
、三线制、两线制3种类型,不同类型信号的接线方式不同。
哪 里
有
① 四线制接线方式。四线制信号是指模拟量仪表或设备上信号线
逻
辑
和电源线加起来有4根线。仪表或设备有单独的供电电源,除了两个
, 那
里
电源线外,还有两个信号线。
模拟量输出模块EM AQ02有2路模拟量输出,其功能将模拟量
哪 里
有
输出映像寄存器AQ中的数字量转换为可用于驱动执行元件的模
西门子S7-200 SMART PLC产品说明书

SMART PLC, SMART CHOICES7-200 SMART 可编程控制器经济、可靠、易用/s7-200smart西门子公司一直致力于工业自动化最新技术的研发、推广及应用,在过去的160 多年里,为广大的工业客户带来了可靠高效的自动化产品,完善的自动化解决方案,提高了客户的生产效率,增强了客户的市场竞争力。
西门子SIMATIC 控制器系列是一个完整的产品组合,包括从最基本的智能逻辑控制器LOGO!以及 S7 系列高性能可编程控制器,再到基于 PC 的自动化控制系统。
无论多么严苛的要求,它都能根据具体应用需求及预算,灵活组合、定制,并一一满足。
SIMATIC S7-200 SMART 是西门子公司经过大量市场调研,为中国客户量身定制的一款高性价比小型 PLC 产品。
结合西门子 SINAMICS 驱动产品及 SIMATIC 人机界面产品,以 S7-200 SMART 为核心的小型自动化解决方案将为中国客户创造更多的价值。
2CPU SR60/ST60 技术规范 ........................................... 20数字量模块技术规范 .................................................. 22模拟量模块技术规范 .................................................. 24信号板技术规范 ......................................................... 25热电阻模块技术规范 .................................................. 26通用技术规范 ............................................................ 26安装尺寸图 ................................................................ 27订货号说明 ................................................................ 27模块和信号板接线示意图 ........................................... 28订货数据 . (30)产品亮点 ................................................................... 04CPU 模块 ................................................................... 06信号板 ....................................................................... 08网络通信 ................................................................... 09运动控制 ................................................................... 10人性化软件 ................................................................ 12小型自动化解决方案 .................................................. 14技术规范 ................................................................... 16CPU SR20 技术规范 .................................................... 16CPU SR40/ST40/CR40 技术规范 . (18)目录3SIMATIC S7-200 SMART 产品亮点机型丰富,更多选择提供不同类型、I/O 点数丰富的CPU 模块,单体I/O 点数最高可达60点,可满足大部分小型自动化设备的控制需求。
200SMART运动控制基本指令详解

200SMART运动控制基本指令详解之前我们讲解过SMART运动控制向导的组态应用,组态好向导后自动生成运动子程序,只需调用对应功能的子程序进行编程即可,那么今天我们分别学习一下常用的子程序的应用。
1、初始化运动轴指令,对每个轴必须要启用一条初始化指令。
而且要保证EN和MOD_EN一直是接通状态(SM0.0)Done:初始化完成标志,正在初始化为OFF,完成则变成为ON。
Error:显示错误代码编号,详情打开帮助查看运动轴错误代码。
C_Pos:当前位置,相对脉冲方式时单位为脉冲数,工程单位则为mm等,其它的子例程中类似,不做另外的说明。
C_Speed:当前速度,相对脉冲时单位为HZ,工程单位则为mm/s,其它子例程中类似,不做另外的说明。
C_Dir:表示电机的当前方向信号状态,0 = 正向, 则1 = 反向。
2.手动子例程,可以手动以指定速度正反转运行,也可以按照向导组态的JOG速度点动正反转运行。
RUN:接通时以Speed中指定的速度连续运行,在运行过程中改变速度就会立刻生效,接通Dir可以切换运行方向(在运行时切换无效)。
JOG_P:正转点动,速度在以向导中组态的电机点的动速度(JOG_SPEED)。
JOU_N:反转点动。
3、单段定量发脉冲子例程,可以以指定的速度和数量来发送脉冲,发送完成后即自动停止。
START:触发开始发脉冲信号,必须在运动轴空闲时发送一次信号,必须要用边沿触发。
POS:设定的数量,相对模式时为距离,绝对模式时为位置。
Speed:设定运行的速度。
Mode:模式选择,=0绝对,=1相对。
绝对:必须建立一个参考点(零点),所有位置都应该以该点为参考,要运行到何处,只需要设定该处的绝对位置系统自动根据当前位置识别方向和行进的距离,该模式适合做定位控制。
如下图中当前位置处在A处,如果设定位置为200,则自动前进到200,如果设定位置为100,则自动后退到100处。
相对:亦称增量模式,无需建立参考点,每次以当前位置为起点,运行一个相对距离,不方便进行定位控制。
【智】S7-200SMART运动控制指令详解带你启程!
【智】S7-200SMART运动控制指令详解带你启程!大家好,我是微控小智,今天又跟大家见面了。
学习需要坚持,做技术亦是如此,厚积才能博发。
小智写的程序都是进行反复测试过的,可以放心跟着操作,有疑问的地方可以留言。
S7-200SMART运动控制指令由编程软件向导生成,运动控制指令有很多条构成,且每条指令都带有很多接口参数,要想使用这些指令,先要知道接口是什么意思,虽然帮助文章都有解释,但读懂帮助文件也很费劲,那么今天,小智就来给大家介绍一下常用的S7-200SMART运动控制指令。
S7-200SMART运动控制指令向导如下图所示:1.启用并初始化轴AXISx_CTRL子程序(控制)启用和初始化运动轴,方法是自动命令运动轴每CPU更改为RUN模式时加载组态/曲线表。
在项目中只对每条运动轴使用此子程序一次,并确保程序会在每次扫描时调用此子程序。
使用SM0.0(始终开启)作为EN参数的输入。
管脚含义:MODE:启用模块。
1=可发送命令;0=中止进行中的任何命令Done:完成标志位Error:错误代码(字节)C_Pos:轴的当前位置(绝对定位或者相对定位),工程单位:Real型数据;相对脉冲:DINT型数据C_Speed:轴的当前速度,Real型数据C_Dir:轴的当前方向(1=反向,0=正向)2.手动控制轴AXISx_MAN子例程(手动模式)将运动轴置为手动模式。
这允许电机按不同的速度运行,或沿正向或负向慢进。
在同一时间仅能启用RUN、JOG_P或JOG_N输入之一。
管脚含义:RUN:1=轴手动运行(速度和方向分别由Speed和Dir管脚控制)0=停止手动控制JOG_P:1=正转点动控制JOG_N:1=反转点动控制Speed:RUN运行时的目标速度,Real型数据Dir:RUN运行时的方向Error:错误代码(字节)C_Pos:轴当前位置(绝对定位或者相对定位),工程单位:Real型数据;相对脉冲:DINT型数据C_Speed:轴当前速度,Real型数据C_Dir:轴的当前方向(1=反向,0=正向)3.绝对或者相对定位AXISx_GOTO子程序命令运动轴转到所需位置。
4_S7-200 SMART_Motion Control汇总
Page 7
2012.11
©Siemens Ltd., China 2012. All Rights Reserved. Industry Sector
V80的指令脉冲和指令滤波设置
指令脉冲设置(PULSE)
指令滤波设置(FIL)
Page 8
2012.11
©Siemens Ltd., China 2012. All Rights Reserved. Industry Sector
Page 2
2012.11
步进电机与伺服电机的区别
步进电机 力矩范围 速度范围 中小力矩(一般小于20Nm) 低(一般<2000rpm,大力矩电机 <1000rpm)
伺服电机 小中大,全范围 高(可达5000rpm,直流更可达1-2万 rpm)
控制方式 低频特性
控制精度
主要位置控制 低速时有振动
低,主要由步距角决定
运动控制—STOP
启用停止输入点
响应方式
有效电平选择
Page 17
2012.11
©Siemens Ltd., China 2012. All Rights Reserved. Industry Sector
运动控制—电机速度
最大速度(V80 是3000转/分, 1000脉冲/转)
最小速度:是 MAX_SPEED值 的5%至15%。
提供多达32组的移动包络,每组最多可有16种速 度;
提供4种不同的参考点寻找模式,每种模式都可对 起始的寻找方向和最终的接近方向进行选择。
©Siemens Ltd., China 2012. All Rights Reserved. Industry Sector
Page 4
S7-200 SMART PLC应用技术 模块五 S7-200 SMART PLC模拟量及运动控制
, 那
图所示。
里 就
有
自
动
化
控
制
验布机的控制原理
2019年8月26日星期一
S7-200 SMART PLC应用技术
哪
里
有
逻
辑
,
那
里
就
有
自
动
化
模拟量输出端给频率信号
控
制
验布机控制电路
2019年8月26日星期一
S7-200 SMART PLC应用技术
3.参数设置
哪 里 有 逻 辑 , 那 里 就 有 自 动 化 控 制
1.模拟量输入模块EM AE04
(1)概述
哪
里
模拟量输入模块EM AE04有4路模拟量输入,其功能是将输入的模
有
逻
拟量信号转化为数字量,并将结果存入模拟量映像寄存器AI中。
辑
,
模拟量输入模块EM AE04有4种量程,分别为:0~20mA、
那 里
-10~10V、-5~5V、-2.5~2.5V。
就 有
自
2019年8月26日星期一
S7-200 SMART PLC应用技术
3.模拟量输入/输出模块EM AM06
模拟量输入/输出模块EM AM06有4路模 拟量输入和2路模拟量输出。
哪 里 有 逻 辑 , 那 里 就 有 自 动 化 控 制
2019年8月26日星期一
S7-200 SMART PLC应用技术
2019/8/26
(b)模拟量输出通道的组态
S7-200 SMART PLC应用技术 任务实施
【训练工具、材料和设备】
哪
里
有
通用电工工具1套
逻 辑
S7-200-SMART控制步进电机电子教案
S7-200 SMART控制步进电机供稿:中国工控网2016/3/4 17:03:09星级:人气:2781•关键词:S7-200 SMART 步进电机位置控制运动控制•摘要:使用SMART控制步进电机定位,正转,反转,急停,减速停止,位置归零等功能。
硬件:S7-200 SMART型号ST40PLC一台;开关电源2套,一个为MW的220VAC--24VDC作为PLC以及步进驱动器的供电电源,一个220VAC--5VDC,作为步进驱动器的信号电源;42型步进电机一台;网线一条;计算机一台;实现功能:使用SMART控制步进电机定位,正转,反转,急停,减速停止,位置归零等功能。
硬件连接图纸:实物连接:接下来说说这款步进驱动器的设置,在步进驱动器上有6个DIP开关,S1-S3用于选择8档细分控制(1、2、4、8、16),通过S4-S6 3位拨码开关选择6档电流控制(0.5A、1A、1.5A、2.0A、2.5A、3.0A、3.5A、4.0A)。
细分选择8,即1600脉冲,由于电机为42型,电流1.7A,故可以选择2.0A的电流,步进驱动器上清晰地标注了DIP开关的ON/OFF对应的数字。
连接好了硬件,接下来就是组态了。
S7-200 SMART提供了非常方便的运动控制功能向导,根据向导一步一步进行。
选择测量系统,这里选择的是工程单位mm,步进电机的步距角为1.5,细分8,那么根据计算得知电机旋转一周所需脉冲数为360/1.5*8=1600,电机一次旋转产生多少mm的运动,这个要看实际连接情况,包括减速机、丝杆等部件。
由于这里只针对电机,所以按照电机输出轴计算得15.708方向控制里,选择相位单相(2输出),一个输出脉冲,一个指示运动方向。
输出DIS,勾选启用,用于当电机静止时,可以自由转动电机,以便调试或实际加工中的对刀。
还提供了运行曲线功能,在S7-200中类似于PTO包的功能,设定目标速度和终止位置,这里也有点像变频器用的多段速功能呦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S7-200 SMART PLC的运动控制向导运动轴(Axis of Motion)内置于 S7-200 SMART CPU 的运动控制功能使用运动轴(Axis of Motion)进行步进电机和伺服电机的速度和位置控制。
S7-200 SMART CPU 提供3个单轴控制,其组态方式与S7-200的EM253类似,S7-200 SMART CPU 目前未提供单独的运动控制模块。
其开环位置控制提供以下功能:1.提供高速控制(高速脉冲输出),速度从每秒2个脉冲到每秒100,000个脉冲(2HZ到100KHZ);2.提供可组态的测量系统,既可以使用工程单位(例如英寸和厘米)也可以使用脉冲数;3.提供可组态的反冲补偿;4.支持绝对、相对和手动位控方式;5.提供连续操作;6.提供多达32组移动曲线,每组最多可有16步;7.提供4种不同的参考点寻找模式,每种模式都可对起始的寻找方向和最终的接近方向进行选择。
8.支持急停(S曲线)或线性加速及减速。
9.提供 SINAMICS V90驱动器的相关支持。
使用 STEP7-Micro/ WIN SMART 可以创建运动轴所使用的全部组态。
这些组态和程序块需要一起下载到CPU中。
S7-200 SMART CPU 的运动控制能够实现主动寻找参考点功能,绝对运动功能,相对运动功能,单、双速连续旋转功能,速度可变功能(依靠 AXISX_MAN 指令实现)及曲线功能。
所有的轴功能都是单轴开环控制,系统不提供轴与轴之间的耦合及轴的闭环控制,如果有这方面需求,则用户需要自己搭建功能,但最终的应用效果要根据实际环境验证,西门子无法提供保证。
S7-200 SMART CPU 运动控制输入/输出点定义见表 1:RPS RPS(参考点)输入可为绝对运动操作建立参考点或零点位置。
中的任意一个,但是同一个输入点不能被重复定义LMT+ LMT+和LMT-是运动位置的最大限制。
位控向导中可以组态LMT+和LMT-输入。
LMT-ZP(HSC) ZP(零脉冲)输入可帮助建立参考点或零点位置。
通常,电机驱动器/放大器在电机的每一转产生一个ZP脉冲CPU 本体高速计数器输入可被组态为ZP输入HSC0 (I0.0)HSC1 (I0.1)HSC2 (I0.2)HSC3 (I0.3)输出Axis0 Axis1 Axis2 P0P0和P1是源型晶体管输出,用以控制电机的运动和方向。
Q0.0 Q0.1 Q0.3 P1 Q0.2Q0.7 orQ0.3*Q1.0 DISDIS是一个源型输出,用来禁止或使能电机驱动器/放大器。
Q0.4 Q0.5 Q0.6 *如果Axis1组态为脉冲加方向,则P1分配到Q0.7。
如果Axis1组态为双向输出或者A/B相输出,则P1被分配到Q0.3,但此时Axis2将不能使用。
组态 Axis of Motion :Micro/WIN SMART 提供了运动控制向导,可生成组态/曲线表和位控指令。
打开“运动控制”向导,“工具”->“向导”->“运动控制”1、运动控制向导组态选择要组态的轴,用户可在需要激活的轴前打勾,S7-200 SMART CPU 提供3个轴资源用于运动控制。
选择运动轴命名运动轴2、测量系统组态对应项的含义如下所述:1)选择测量系统可选择“工程单位”或是“相对脉冲”,如果选择“相对脉冲”则没有下面选项的设置,脉冲数与电动机的分辨率(步距角)有关。
2)当选择“工程单位”时,需要设置电机旋转一周所需脉冲数。
此参数的确定要与伺服中的设置匹配,如电子齿轮比。
3)当选择工程单位时所用的单位。
4)当选择工程单位时,电机每转一周负载轴的实际位移,是负载轴的运动位移,与传动的实际机械结构有关。
3、方向控制组态对应项的含义如下所述:1)选择脉冲输出的形式,分为单相(脉冲+方向)、双相、正交与单相(仅脉冲):选择单相(脉冲+方向),向导将为S7-200 SMART分配两个输出点,一个点用于脉冲输出,一个点用于控制方向。
选择双相,向导将为S7-200 SMART分配两个输出点,一个点用于发送正向脉冲,一个点用于发送负向脉冲。
选择正交,向导将为S7-200 SMART分配两个输出点,一个点发送A相脉冲,一个点发送B相,AB相脉冲之间相位相差为90°。
选择单相(仅脉冲),向导将为S7-200 SMART分配一个输出点,此点用于脉冲输出。
S7-200 SMART的运动控制功能不再控制方向,方向可由用户自己编程控制2)该波形图是与选择的输出形式对应的示意图。
4、LMT限位点组态a.正限位使能;b.正限位输入点;c.指定相应输入点有效时的响应方式;d.指定输入信号有效电平(低电平有效或者高电平有效)。
a.负限位使能;b.负限位输入点;c.指定相应输入点有效时的响应方式;d.指定输入信号有效电平(低电平有效或者高电平有效)。
对应项的含义如下所述:1)选择是否激活正向限位及选择正向限位点。
2)选择轴碰到限位开关时的停止方式:立即停止或减速停止。
3)选择激活正向限位的电平状态,上限为高电平有效,下限为低电平有效。
△注意:7-200 SMART CPU只提供硬件限位,不提供软件限位。
5、RPS参考点组态a.使能参考点;b.参考点输入点;c.指定输入信号有效电平(低电平有效或者高电平有效)选择是否激活参考点功能及使用哪个点作为参考点,并选择激活参考点的电平状态,上限为高电平有效,下限为低电平有效。
参考点的设置为使用绝对运动的前提条件。
6、ZP零脉冲组态a.使能零脉冲:b.零脉冲输入点。
选择是否激活编码器零脉冲信号及选择哪个点作为输入。
此点需要与相应的回零模式配合使用,使用此种方式,可以实现更精确的参考点定位。
ZP信号输入点都为固定的点,用户无法自由选择输入点用于ZP的输入信号,所以若要使用此功能,需要提前规划好输入点分配。
7、STP停止点组态a.使能停止点;b.停止输入点;c.指定相应输入点有效时的响应方式;d.指定输入信号的触发方式,可以选择电平触发或者边沿触发。
e.指定输入信号有效电平(低电平有效或者高电平有效)。
对应项的含义如下所述:1)选择是否激活STP及将哪个点作为STP。
STP是除硬件限位外唯一能实现急停的输入点。
2)选择激活STP,并选择是减速停止还是立即停止。
3)选择STP信号的触发方式,电平触发或沿触发。
选择电平触发时,只要STP信号输入有效,运动便会停止选择边沿触发时,只有当STP从无效变为有效时,运动才会停止。
运动停止后,可发出新的运动命令。
4)选择有效的激活电平,上限为高电平有效,下限为低电平有效。
8、TRIG曲线停止功能组态对应项的含义如下所述:1)选择是否激活TRIG及使用哪个点作为TRIG输入点。
此功能用于运行包络的项目中,可用于停止包络。
2)选择激活TRIG的有效电平,上限为高电平有效,下限为低电平有效。
9、DIS驱动器禁用/启用功能组态选择是否激活DIS。
DIS是伺服驱动器的使能信号,组态中只能使用系统分配的点,无法选择其他点,如果需要使用此功能,要提前规划好输出点的分配。
轴0的DIS始终组态为Q0.4。
轴1的DIS始终组态为Q0.5。
轴2的DIS始终组态为Q0.6。
注意:每个轴的输出点都是固定的用户不能对其进行修改,但是可以选择使能/不使能 DIS。
10、电机速度组态a.定义电机运动的最大速度“MAX_SPEED”;b.根据定义的最大速度,在运动曲线中可以指定的最小速度;c.定义电机运动的启动/停止速度“SS_SPEED”。
对应项的含义如下所述:1)电机的最大速度,电机扭矩范围内系统最大的运行速度。
2)电机的最小速度,此数值根据最大速度由系统自动计算给定。
3)启动/停止速度,能够驱动负载的最小转矩对应速度,此数值建议参照电机的扭矩转速曲线图,并根据机械负载折合到电机轴的扭矩计算得出。
如果不方便计算也可以考虑按最大速度( MAX_SPEED)值的5%-15%设定。
如果 SS_SPEED 数值过低,电机和负载在运动的开始和结束可能会摇摆或颤动。
如果 SS_SPEED 数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。
11、点动功能组态a.定义点动速度“JOG_SPEED”(电机的点动速度是点动命令有效时能够得到的最大速度)b.定义点动位移“JOG_INCREMENT”(点动位移是瞬间的点动命令能够将工件运动的距离)对应项的含义如下所述:1)点动时的速度。
2)点动时间小于0.5s时所执行的位移。
点动一般用于手动调整,其速度的设置要根据现场的需求决定。
增量设置则可以定义点动的最小运行距离,其数值一般取决于手动微调的最小幅度。
注意:当 CPU 收到一个点动命令后,它启动一个定时器。
如果点动命令在0.5秒到时之前结束,CPU 则以定义的SS_SPEED速度将工件运动JOG_INCREMENT 数值指定的距离。
当0.5秒到时时,点动命令仍然是激活的,CPU 加速至JOG_SPEED速度。
继续运动直至点动命令结束,随后减速停止。
12、电机加减速时间组态a.设置从启动/停止速度“SS_SPEED”到最大速度“MAX_SPEED"的加速度时间“ACCEL_TIME”b.设置从最大速度“MAX_SPEED”到启动/停止速度“SS_SPEED”的减速度时间“DECEL_TIME ”对应项的含义如下所述:1)定义轴的加速时间,默认值为1000ms。
2)定义轴的减速时间,默认值为1000ms。
这两个参数需要根据工艺要求及实际的生产机械测试得出。
如果需要系统有更高的响应特性,则将加减速时间减小。
测试时在保证安全的前提下建议逐渐减小此值,直到电机出现轻微抖动时,基本就达到此系统加减速的极限。
除此之外,还需要注意与CPU连接的伺服驱动器的加减速时间设置,向导中的设置只是定义了CPU输出脉冲的加减速时间,如果希望使用此加减速时间作为整个系统的加减速时间,则可以考虑将驱动器的加减速时间设为最小,以尽快响应CPU输出脉冲的频率变化。
13、S曲线(急停)时间组态S曲线功能可对频率突变部分进行圆滑处理,以减小设备抖动,得到更好的动态效果。
在某些应用中,对机械抖动有较高要求,而频率突变的部分很容易导致抖动,S曲线功能则可以在加速的初始与结束阶段,通过修改加速度使速度曲线在频率突变部分更为圆滑以起到减小抖动的作用。
14、反冲补偿组态反冲补偿是用于轴在反转时对机械磨损的补偿,如果是齿轮驱动的设备,在反转时会出现由于磨损而导致的间隙,则可以在此处设置补偿脉冲,以提高定位精度。
注意:反冲补偿为当方向发生变化时,为消除系统中因机械磨损而产生的误差,电机必须运动的距离。
反冲补偿总是正值。
(缺省=0)15、使能寻找参考点位置注意:若您的应用需要从一个绝对位置处开始运动或以绝对位置作为参考,您必须建立一个参考点(RP)或零点位置,该点将位置测量固定到物理系统的一个已知点上。