机械创新设计第九章
机械创新设计案例
三种参数的测量结果同时送人由单片机系统组 成的测量仪表并显示。
三、原理方案的设计 1、电机的选择——摆线针轮减速电机 2、电机的调速方式——变频调速 3、定位夹紧的方法——气动装夹定位 4、动作顺序的控制——PLC控制 5、转矩的测量——非接触式转矩传感器 6、摆矩的测量——扭矩传感器 7、摆角的测量——光电编码器 8、摆动施力方式——步进电机+蜗轮蜗杆减速机 9、测量显示方式——单片机数字显示
摆动力矩、转动力矩的测量原理如图 1 所示。
力矩性能测量原理如下:
(1)摆动力矩的测量方法 : 万向节外圈以角速度ω旋转 , 摆杆带动内圈在
一定的平面摆角±β范围内左右对称摆动 , 摆杆所 受的弯矩即为万向节的摆动力矩。
(2)转动力矩的测量方法: 万向节内圈先摆动到一定的角度β,后并保持此
角度固定不变 , 万向节外圈以角速度ω旋转 , 外圈 所受的扭矩即为万向节的转动力矩。
三、裹包机的工作原理
四、预拉伸送膜机构工作原理
五、预拉伸送膜机构结构图
六、主机构结构图
[案例二] 汽车万向节力矩性能 试验机的设计
一、机器的用途 该试验机主要用于汽车万向节力矩性能的在线检
测,测量参数包括万向节的摆动力矩、转动力矩、最 大摆角等。操作者除了完成装卸试件的动作外,整 个试验过程自动完成。 二、测量原理
第九章 机构创新设计案例
[案例一] 预拉伸塑膜裹包机的设计
一、机器的用途 对于采用集装箱运输的货物,一般在装箱之前,
需要将单箱的货物按一定大小的体积码堆成四方体, 然后利用具有一定弹性和粘性的塑料薄膜缠绕成易 于搬运的单元整体,此项工作需要在裹包机上进行。 二、原理方案的设计
机械基础教案(中职)

机械基础教案(中职)第一章:机械概述1.1 机械的定义与分类讲解机械的基本概念,让学生理解机械的本质和作用。
介绍机械的分类,包括传动机械、执行机械、控制机械等。
1.2 机械的组成部分讲解机械的基本组成部分,包括主机、附件、动力系统、控制系统等。
介绍各个部分的作用和相互关系。
1.3 机械的性能与参数讲解机械的性能指标,包括力、速度、精度、效率等。
介绍机械参数的计算方法和应用。
第二章:机械传动2.1 传动机械的类型与原理讲解传动机械的类型,包括齿轮传动、皮带传动、链条传动等。
介绍各种传动方式的原理和特点。
2.2 齿轮传动讲解齿轮的基本概念,包括齿轮的形状、齿数、模数等。
介绍齿轮传动的计算方法和应用。
2.3 皮带传动与链条传动讲解皮带传动和链条传动的基本概念,包括皮带和链条的规格、张紧方式等。
介绍皮带传动和链条传动的计算方法和应用。
第三章:机械结构3.1 机械结构的基本要素讲解机械结构的基本要素,包括梁、柱、板、壳等。
介绍各个要素的受力分析和设计方法。
3.2 机械结构的设计原则讲解机械结构设计的原则,包括强度、刚度、稳定性等。
介绍结构设计的方法和步骤。
3.3 机械结构的优化讲解机械结构优化的目的和方法,包括尺寸优化、形状优化等。
介绍结构优化算法和应用。
第四章:机械零件4.1 机械零件的类型与功能讲解机械零件的类型,包括轴承、齿轮、联轴器等。
介绍各种零件的功能和应用。
4.2 机械零件的材料与选择讲解机械零件的材料,包括钢、铝、塑料等。
介绍零件材料的选择方法和原则。
4.3 机械零件的加工与装配讲解机械零件的加工方法,包括铸造、锻造、切削等。
介绍零件的装配方法和工艺。
第五章:机械系统5.1 机械系统的组成与分类讲解机械系统的组成,包括主机、动力系统、控制系统等。
介绍机械系统的分类,包括简单机械系统、复杂机械系统等。
5.2 机械系统的分析与设计讲解机械系统的分析方法,包括力学分析、动力学分析等。
介绍机械系统设计的方法和步骤。
机械创新设计第九章 基于TRIZ理论的创新设计
第二节 设计中的冲突及其解决原理
一、冲突的概念及其分类 1. 冲突的概念
图9-4 冲突解决流程图
第二节 设计中的冲突及其解决原理
2. 冲突的分类 二、物理冲突及其解决原理 1. 物理冲突的概念及类型 1)一个子系统中有害功能降低的同时导致该子系统中有用功能的 降低。 2)一个子系统中有用功能加强的同时导致该子系统中有害功能的 加强。 2. 物理冲突的解决原理
第一节 TRIZ发明问题解决理论概述
1)在以往不同领域的发明中所用到的原理(方法)并不多,不同时代 的发明,不同领域的发明,其应用的原理(方法)被反复利用。 2)每条发明原理(方法)并不限定应用于某一特殊领域,而是融合了 物理原理、化学原理和各工程领域的原理,这些原理适用于不同 领域的发明创造和创新。 3)类似的冲突或问题与该问题的解决原理在不同的工业及科学领 域交替出现。 4)技术系统进化的模式(规律)在不同的工程及科学领域交替出现。 5)创新设计所依据的科学原理往往属于其他领域。 三、TRIZ解决发明创造问题的一般方法
图9-5 分离原理的组成
第二节 设计中的冲突及其解决原理
(1)空间分离原理 所谓空间分离原理是指将冲突双方在不同的空 间上分离,以降低解决问题的难度。 1)是否冲突一方在整个空间中“正向”或“负向”变化。 2)在空间中的某一处,冲突的一方是否可以不按一个方向变化。
第二节 设计中的冲突及其解决原理
图9-8 易于运输的“玻璃块”
1)将一个物体放在第二个物体中,将第二个物体放在第三个物体 中,可以这样再进行下去。
第二节 设计中的冲突及其解决原理
2)使一个物体穿过另一个物体的空腔。 1)用另一个能产生提升力的物体补偿第一个物体的质量。 2)通过与环境相互作用产生空气动力或液体动力的方法补偿第一 个物体的质量。 例9-12 具有球形重物的速度调节器常被用来调节回转速度(见图9 -9)
机械创新设计 第九章 机械创新设计实例
能补偿位移和偏 移,有一定的缓冲 减振能力
能补偿位移和偏 移,缓冲减振能力 好
5
机械创新设计—机械创新设计实例
套筒联轴器
凸缘联轴器
十字滑块联轴器
齿轮联轴器 6
机械创新设计—机械创新设计实例
链条联轴器
万向联轴器
弹性套柱销联轴器
尼龙柱销联轴器
7
机械创新设计—机械创新设计实例
方案II A112—A22—B2—C3—D3—E31—F36—G1—H12—H22
15
机械创新设计—机械创新设计实例 实例二 抓斗的原理方案创新设计
抓斗功能 主要用于就地装卸大量散粒物料,用于河口、港口、车 站、矿山、林场等处。 任务的提出 目前使用的一些抓斗,还不能完全满足装卸要求。市场 上希望有一种装卸效率高、作业快、功能全、适用广的散货 抓斗。
2
机械创新设计—机械创新设计实例
第九章 机械创新设计实例
实例一 联轴器的创新设计
联轴器功能 机械中的常用部件,主要用于联接两轴并传递运动和转 矩。 任务的提出 各类机械、机床的转速、载荷、工作环境变化多端,要 求设计人员不断研制新型的联轴器或改进联轴器以适应不同 的工况。
3
机械创新设计—机械创新设计实例
主动轴 n,T
可移式联轴器开发创新设计
左半联轴器
中间元件
右半联轴器
联接元件
联轴器系统结构
联接两轴并传递运动与转矩
联 接
传 递 运 动 与 转 矩
补 偿 两 轴 相 对 位 移
吸 震 缓 冲
润 滑 密 封
维 修 再 生
安 全 保 护
联轴器功能树
从动轴 n,T
机械创新设计课件-第9章 创新实例与分析
BUCT
机械创新设计
在这一作品采用功能移植的方法,将不倒翁的原理移 植到上坡时棘轮防倒作用的控制上,采用同类功能并联 组合方法,研制了双棘轮机构,增加了上坡止退的可靠 性和减小了回滑距离。
BUCT
机械创新设计
6. 饮料瓶捡拾器 第二届全国大学生机械创新大赛中北京化工大学的获奖作品
BUCT
机械创新设计
机械创新设计
BUCT
机械创新设计
该作品主要采用了功能组合创新法, 将一个滑轮机构与凸轮压块机构组合到 一起。同时还采用了自服务的原理,即 同一钢丝绳在经过滑轮改变运动方向后 再扭合到一起,利用钢丝绳自身扭合段 之间的摩擦力作用,来减缓下降运动速 度的。此时,摩擦力的大小还与人体的 重量正相关,达到用自身体重来增加摩 擦力的作用,从本质上讲,这也是一种 自服务。
机械创新设计
BUCT
机械创新设计
BUCT
机械创新设计
在实际运用过程中可以根据人体不同的体重自由方 便的调节绳段之间的扭转圈数,从而调节绳段之间的阻 力,并在绳子的自由端根据实际的需要施加一定的压力 来微调下降的速度或终止下降,已达到逃生的目的。经 实际测试,人体质量为25~50kg时,可扭绳4圈,人体 质量为50~75kg时,可扭绳4.5圈,人体质量为75~ 100kg时,可扭绳5圈。
BUCT
机械创新设计
第9章 创新实例与分析
一、创新思路的分析
第二届全国大学生机械创新设计大赛确定的大赛主题是“健 康与爱心”,内容包括:“助残机械、康复机械、健身机械、 运动训练机械等四类机械产品的创新设计与制作”。在助残 机械中可爬楼梯的轮椅成为不少学校的参赛作品选题。
轮椅爬楼梯最基本的要求就是将轮椅升高到 高一级的台阶上
机械创新设计(第九章)
二、原始机构选择
1.行星传动的选择——外激波摆 动活齿传动
(1)组成结构及传动原理 图912所示
外激波摆动活齿传动的传动原 理;当驱动力输入后,输入轴以等 角速度带动外激波器H绕固定主轴 线转动,由于外激波器内轮廓径向 尺寸的变化,产生向心的推力,推 动摆动活齿绕其在活齿架上的铰链 点摆动,通过摆动活齿中心轮高副 啮合运动,摆动活齿推动外齿中心 轮K以等角速度绕主轴线转动,使 与其固联的输出轴获得输出转速, 于是外激波摆动活齿传动完成了转 速变换运动。
罗伯特——契贝谢夫定理:由一个四杆铰链机构发生的 一条连杆曲线,还可以由另外两个四杆铰链机构发生出来。 或表达为同一连杆曲线,可以用三个不同的四杆机构来实现。
一、连杆点K位于连杆两铰链连线上的同迹连杆机构
图形缩放原理:图9-18a所示为一平行四边形导引机构, 当A点沿任意给定轨迹运动时,C点将绘出与A点相似但缩小了 的轨迹。
单运动的数目。被运动副限制了的相对简单运动称为约束μ
(Unfreiheit)。提供一个约束的运动副称为I级副,提供两个 约束的运动副称为Ⅱ级副,则空间机构自由度计算公式可以写 成
(3)传动效率高 同K-H-V型少齿差行星传动相比,因省去 了W输出机构,单级传动效率可达92%~96%。
4 结构紧凑,体积小,重量轻 5 制造简单、维修拆装方便
6 能单轴或多轴传输动力 5 .外平动齿轮传动存在的问题:
1 为避免传动发生渐开线齿廓重迭干涉,内齿轮副应采用 角变位齿轮传动中的正传动(x1+x2>0),并降低齿高,
式中 i1——第一级减速传动比; i2——第二级传动比。
第二节 活齿减速带轮机构
一、概述
将带传动和行星传动组合起来,在不增加带轮外廓尺寸的 条件下,研制出具有两种传动综合优良性能的行星减速带轮。 如:摆线针齿减速带轮、2K-H行星减速带轮、变速传动轴承减 速带轮、钢球行星摩擦减速带轮等。
机械创新设计第2版1
第二章 原理方案的创新设计
❖ 原理方案设计步骤
机械创新设计第2版 ppt 课件
第二章 原理方案的创新设计
机械创新设计第2版 ppt 课件
第二节 功能原理方案的创新设计
❖ 一、功能的描述
❖ 功能是产品或技术系统特定工作能力抽象化的描述,。 在功能原理方案设计时,对设计对象中功能的描述要 准确、简洁,要合理抽象,抓住本质。
❖ 五、功能求解
❖ 1. 功能元解 ❖ 1)参考借鉴有关产品资料或专利; ❖ 2)利用“设计目录” ; ❖ 3)运用各种创造技法探索新解法。 ❖ 如:输送液体原理解法分析。 ❖ (1)负压效应
❖ 1)利用压力p与容积V的关系(pV=常数),
增大容积空间形成负压吸入液体,减小 容积空间形成高压输出液体。如波纹管 水泵,拉压塑料波纹管1改变其容积,液 体从单向阀2吸入,从单向阀3压出,水 头可达3m多。
第三节 设计目录
❖ 一、原理解法的设计目录
❖ 用功能设计法进行原理方案设计,功能元解是组合原 理方案的基础。工程系统的基本功能元可归结为物理 功能元、逻辑功能元和数学功能元三类。
❖ (1)逻辑功能元——“与”、“或”、“非”三元,主 要用于控制功能。基本逻辑关系如表2-3所示。
❖ 由机械、强电、电子、射流、气体、液体等领域可寻 找相应的“与”、“或”、“非”逻辑动作的各种解 法,其部分解法目录列于表2-4。
第二章 原理方案的创新设计
❖ (3)毛细管效应
高性能的轻质热管为两端封闭的管子,衬里为数层 金属丝网,管内封装液体,在高温端液体吸热蒸发, 蒸气流至低温端放热,冷凝后的液体由毛细管效应通 过金属丝网流回热端。此种热管用于人造卫星和冻土 层输油管保温等。
第二章 原理方案的创新设计
机械创新设计(较完整版)

机械创新设计(较完整版)第一讲1、机械创新设计与现代设计、常规设计有什么差异和关联?创新设计方法:充分发挥设计者的创造力,利用人类现有相关科学技术知识,实现创新构思,获得新颖性、创造性、实用性成果.特点:强调发挥创造性,提出新方案,提供新颖。
独特的设计方法,获得具有创新性、新颖性、实用性的成果。
现代设计:以计算机为工具,运用各类工程应用软件及现代设计理念进行的机械设计。
常规设计:常规设计是以应用公式、图标为先导,已成熟的技术为基础,借助设计经验等常规方法进行设计关联:机械常规设计始终是最基本的机械设计方法,在强调现代设计、创新设计时不可忽视其重要性。
创新设计的基础——常规、现代设计方法的综合、灵活运用。
现代设计方法仅仅借助了先进、高效的计算机应用手段,提高了设计过程的效率,但没有脱离常规设计的思维。
2.现代创新人才应具备那些基本素质?(1) 具备必须的基础知识和专业知识(2) 不断进取与追求的精神(3) 合理的创新思维方式(突破传统定式)(4) 善于捕捉瞬间的灵感(创新的必备条件)(5) 掌握一定的创新技法3.学习机械创新设计的内容有那些?1.机构的创新设计2.机构应用创新设计3.机构组合设计产生新机构系统4.机械结构的创新设计5.利用反求原理进行创新设计6.利用仿生原理进行创新设计第二讲1简述创造性思维四大特性(方法的开放性;过程的自觉性;解决问题的顿悟性;结果的独特性)。
影响创造性思维形成与发展的主要因素包括哪些?(1)天赋能力:与生俱来的所有神经元(2)生活实践:后天实践活动具有的重大意义(3)科学地学习与训练科学、简单易行的专业学习与训练2.了解和阐述创造性思维、创造活动、创造能力三者的关系。
3.理解综合、分离创造原理的特性和基本实施途径。
概念:有目的的将复杂对象分解,提取核心技术,并利用于其他新事物。
特征:1)与综合创造原理对立,但不矛盾;2)冲破事物原有形态的限制,在分离中产生新的技术价值;3)实质上综合法与分离法两者无明显界限,实践中常常相互贯穿,共同促成新事物。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
与其固联的从动轴输出,从而实现了大速比减速。
当单轴输入时,每一片行星轮在0°和180°位置时,是
不能传递运动和扭矩的,所以必须要用三片以上的内齿轮才能
正常地工作。 3.运动学分析
iHGK
zK zG zK
4.外平动齿轮传动的特点 (1)传动比大、分级密集,单级传动比在11~99之间,双级
传动比可达9801。 (2)承载能力大 啮合时几乎是面接触,齿面赫兹应力小。单
外平动齿轮机构的基本型:外平动齿轮机构是指一个 齿轮在另一个齿轮的外部作平动,驱动另一个齿轮作定轴 转动。图9-1a所示为内啮合平动齿轮机构;图9-1b所示为 外啮合平动齿轮机构。
可以演化成图9-2所示的二环减速器和三环减速器。
2.传动原理
运动和动力输入时,支承在两高速轴上的内齿轮G作平面
平动,并驱动与之啮合的定轴外齿中心轮K,使运动和动力从
上述存在的问题是这种传动的基本原理所决定的,改进
传动原理,开发新的传动类型是平动齿行星轮传动发展 的重要途径。
外平动齿轮机构的A、D两轴之距离受结构的限制
LAD d 0 d 2e
式中 d0——内齿轮根圆直径; d2e——偏心轴距。
外平动齿轮机构的尺寸难以缩小,而且提供内齿轮作平动 的曲柄轴只能有两个,限制了输入功率的分流,不利于传递过 大的功率。
原始机构,可以演化出多种性能相同而结构不同的圆平动机 构。
2.用正弦机构实现齿轮圆平动 3.用孔销机构实现齿轮圆平动
应用“机构同性异形变换原理”,还可以演化出多种圆平
动机构。它的性能决定了平动齿轮传动的性能,所以每综合出 一种圆平动机构,就得到一种新型平动齿轮传动。
三、平动齿轮机构的演化
平动发生器是平动齿轮机构的关键技术。不同的平动发生器, 会演化出结构不同的平动齿轮机构,相同的平动发生器,结构不 同,也会演化出性能差异很大的平动齿轮传动装置。
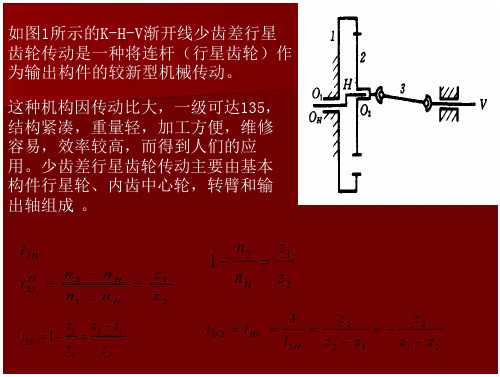
n2 n1
nH nH
z1 z2
i2H
1
z1 z2
z2 z1 z2
1 n2 z1 nH z2
iH 2 iHV
1 i2H
z2 z2 z1
z2 z1 z2
第九章 机械创新设计实例分析
第一节 平动齿轮传动机构
一、平动齿轮机构的结构及传动原理 1.平动齿轮机构的基本型
平动齿轮机构的基本型由外平动齿轮机构和内平动齿 轮机构两种基本型组成。
(1)组成结构及传动原理 图912所示
外激波摆动活齿传动的传动原 理;当驱动力输入后,输入轴以等 角速度带动外激波器H绕固定主轴 线转动,由于外激波器内轮廓径向 尺寸的变化,产生向心的推力,推 动摆动活齿绕其在活齿架上的铰链 点摆动,通过摆动活齿中心轮高副 啮合运动,摆动活齿推动外齿中心 轮K以等角速度绕主轴线转动,使 与其固联的输出轴获得输出转速, 于是外激波摆动活齿传动完成了转 速变换运动。
i1Hb
Z2Zb Z1(ZbZG )
i1i2
式中 i1——第一级减速传动比; i2——第二级传动比。
第二节 活齿减速带轮机构
一、概述
将带传动和行星传动组合起来,在不增加带轮外廓尺寸的 条件下,研制出具有两种传动综合优良性能的行星减速带轮。 如:摆线针齿减速带轮、2K-H行星减速带轮、变速传动轴承 减速带轮、钢球行星摩擦减速带轮等。
平动齿轮减速滚筒具有:传动比大、机械效率高、结构紧凑、 尺寸和重量轻、均载性能好等优点。
3.双曲柄平动齿轮机构 多曲柄平动齿轮机构。如图
9-11所示。 多曲柄平动齿轮机构的传动
原理:输入轴的转速经第一级减 速后,由平动发生传递给平动 齿轮ZG,同时限制了平动齿轮 ZG的自转,再经第二级减速后, 由内齿中心轮Zb输出。其传动比 统一表达式为
1)为避免传动发生渐开线齿廓重迭干涉,内齿轮副应采用 角变位齿轮传动中的正传动(x1+x2>0),并降低齿高, 形成非标准的短齿。啮合角α′增加,使传动机构的动力 学性能变差。
2)必须满足一定的装配条件能装配起来。同时也为精度 设计增加了限制条件。
3)传动机构的振动大、噪声高,并随着转速的提高迅速 增加。
个转臂轴承变换为多个转臂轴承分担载荷,转臂轴承的寿命
可达两万小时,且转臂轴承等基本构件不受内齿轮尺寸的限 制,可以按强度要求确定,利于按强度进行优化设计。
(3)传动效率高 同K-H-V型少齿差行星传动相比,因省去 了W输出机构,单级传动效率可达92%~96%。
(4)结构紧凑,体积小,重量轻 (5)制造简单、维修拆装方便 (6)能单轴或多轴传输动力 5.外平动齿轮传动存在的问题:
如图1所示的K-H-V渐开线少齿差行星 齿轮传动是一种将连杆(行星齿轮)作 为输出构件的较新型机械传动。
这种机构因传动比大,一级可达135, 结构紧凑,重量轻,加工方便,维修 容易,效率较高,而得到人们的应 用。少齿差行星齿轮传动主要由基本 构件行星轮、内齿中心轮,转臂和输 出轴组成 。
i HV
i2H1
6.内平动齿轮机构的基本型及其演化 图9-4所示为内平动齿轮机构的基本型。图9-5所示的内二环
减速器和内三环减速器。 内平动齿轮机构可获得较小尺寸和重量,其整机性能优于外
平动齿轮机构。
二、平动齿轮传动的关键技术
使齿轮实现圆平动运动的机构为圆平动机构。常用的圆 平动机构有:
1.用平行四边形机构实现齿轮圆平动 应用“机构同性异形变换原理”,以平行四边形机构为
1.浮动盘式平动齿轮机构
根据“机构同性异形变换原理”,用浮动盘式W机构去替 代孔销式W机构,就形成了图9-9所示圆平动齿轮机构运动简图。
2.平动齿轮减速滚筒 图9-10所示为平动齿轮减速滚筒结构简图,由电动机1、滚
筒2和孔销式平动齿轮机构3串联组成。电动机1、平动发生器销 轴与机架固联,内齿中心轮与卷筒固联为输出件,形成卷扬机型 减速装置。
研制出传动性能优越的行星减速带轮主要取决于两个方面: 1)选择好原始机构——带传动和行星传动的类型; 2)解决好带轮与行星传动的结合。 行星减速带轮机构以全滚动摆动活齿传动为基础,利用外 激波活齿传动的结构特点,使带轮与外激波器合二为一,摆动 活齿减速带轮。
二、原始机构选择
1.行星传动的选择——外激波摆 动活齿传动
(2)传动比的计算 活齿传动传动比通用方程式为