第3章杆件结构的有限元法_虚功原理
结构力学虚功原理课件
刚体的位移
01
刚体的位移
在结构力学中,刚体的位移是研究结构在受力作用下的变形和运动状态
的基本概念。刚体的位移涉及到结构的位移、转角、挠度等参数,这些
参数可以通过测量或计算得到。
02
位移的测量
位移的测量是确定结构在受力作用下的变形程度和运动状态的重要手段。
通过测量位移可以了解结构的响应和行为,从而评估结构的性能和安全
能量原理与虚功原理的关系
能量原理与虚功原理 的联系
能量原理和虚功原理都是弹性力学中 的基本原理,它们之间存在密切的联 系。能量原理指出,对于一个处于平 衡状态的弹性体,其总能量(包括外 力势能和内能)在任何微小虚位移下 的改变量等于零。而虚功原理则是能 量原理的一种特殊情况,即当外力势 能忽略不计时,能量原理就变为虚功 原理。
03
虚功原理的推导
力的平衡方程
力的平衡方程是结构力学中的 基本方程,它描述了结构中力 的平衡条件。在平衡状态下, 作用在结构上的所有外力之和 为零。
力的平衡方程可以表示为:∑F = 0,其中∑F表示作用在结构上 的所有外力矢量和。
力的平衡方程是求解静力学问 题的基础,通过它我们可以求 解出结构的位移、应变和应力 等参数。
实例分析
以梁为例,通过应用虚功原理,可以分析梁在不同载荷下的变形和应力分布,从而优化梁的截面尺寸和 形状,提高其承载能力和刚度。
06
总结与展望
虚功原理的重要性和意义
结构力学中的虚功原理是分析结构稳定性和变形的关键理论之一,对于工程设计和建筑安全具有重要 意义。
虚功原理能够为结构设计和优化提供理论基础,帮助工程师更好地理解和控制结构的力学行为,提高结 构的稳定性和安全性。
变形方程,进而求解物体的内力和变形。
杆件结构的有限元法
第一篇 有限元法
第二章 杆件结构的有限元法
当结构长度尺寸比两个截面方向的尺 寸大得多时,这类结构称为杆件。工程中 常见得轴、支柱、螺栓、加强肋以及各类 型钢等都属于杆件。
杆件结构可分为珩杆和梁两种。
和其他结构采用铰连接的杆称为珩杆。珩杆的连接处可以自由转动, 因此这类结构只承受拉压作用,内部应力为拉压应力。影响应力的 几何因素主要是截面面积,与截面形状无关。 和其他结构采用固定连接的杆称为梁。链的连接处不能自由转动, 因此梁不仅能够承受拉压,而且能承受弯曲和扭转作用。这类杆件 的内部应力状态比较复杂,应力大小和分布不仅与截面大小有关, 而且与截面形状和方位有很大关系。 建立有限元模型时,这两类杆件结构可用相应的杆单元和梁单元离散。
Ke 1 kkaa
ka
ka
中的元素在总刚度矩阵中应在位置第1行、第2行的第1列,第2列
k k
1 11
1 21
k
1 12
k
1 22
0
0
0 0 0
第2个单元的节点号为2和3,则单元刚度矩阵叠加到总刚度矩阵 的第2行、第3行的第2列、第3列元素上
0 0 0
0
k
2 22
k
2 23
0
k
2-3 杆件系统的有限元法
一、铰支杆系统的有限元计算格式 上面求解弹簧系统的有限元方法可以直接用力求解受轴向力的杆件系统。 均质等截面铰支杆,刚度值可由材料力学中力与变形的关系中获得
AE F1 L u1
k AE L
均质等截面铰支杆的力-位移方程可写为
F F12ALE11 11uu12
坐标变换
由杆件组成的机构体系称为杆系,如起重机、桥梁等。 由珩杆组成的杆系称为珩架,由梁组成的杆系称为刚架。
结构力学虚功原理课件

(二)虚功原理
具有理想约束的刚体体系在任意平衡力系作用下,体 系上所有主动力在任一与约束条件相符合的无限小刚 体位移上所作的虚功总和恒等于零。
W 0
刚体体系的虚功方程
所谓理想约束,是指其约束力在虚位移 上所作的功恒等于零的约束。
(三)虚功原理的两种应用
1.虚设位移状态——求未知力
拟求支座A处的支反力
位移的分类:线位移;角位移。
角位移
线位移
A
A
B
B
相对角位移
2、结构位移计算的目的
①验算结构的刚度; ②为超静定结构的内力计算打下基础; ③结构制作、施工的需要。
3、结构位移计算的假定
①材料服从虎克定律。 ②结构的变形是微小的。 ③结构各处的约束都是理想约束。
线弹性体系
§5-2 虚功原理
(1)刚体体系虚功原理 (2)变形体体系虚功原理
FP
A
B FBx
FA
a
b
l
FBy
W FA A FP P 0
FA
FP
P A
P b A l
b FA l FP
FP
A
B
FA
△A
△P
B
A
A 1
P
b l
B
A
FA FP P
虚位移原理
应用虚位移原理求解静定结构的某一约束力时, 一般应遵循如下步骤: (1)解除欲求约束反力的约束,用相应的约束反 力来代替。 (2)把机构可能发生的刚体位移当作虚位移,写 出虚功方程。 (3)求出虚位移之间的几何关系,利用虚功方程 即可求解约束反力。
结构力学
STRUCTURAL MECHANICS
结构力学虚功原理

结构力学虚功原理结构力学虚功原理是结构力学中的一个重要概念,它是通过能量方法来分析结构的力学性能和变形规律的一种理论工具。
虚功原理的提出,为结构力学的研究和工程实践提供了一种简洁而有效的分析方法,对于工程结构的设计和优化具有重要意义。
首先,我们来看一下虚功原理的基本假设。
虚功原理假设结构在受力作用下,其位移满足虚位移的要求。
所谓虚位移,是指在结构受力作用下,结构的位移不仅满足实际受力平衡条件,还需满足虚位移的平衡条件。
这个假设为后续的分析提供了基础,也是虚功原理得以应用的前提。
虚功原理的核心思想是能量守恒。
在结构受力作用下,结构内部会产生应变能和变形能,而外部施加的力会做功。
根据能量守恒的原理,结构受力平衡时,内部的能量增加等于外部做功,这就是虚功原理的基本表达式。
通过对这个表达式的分析,可以得到结构的受力方程和变形规律,为结构设计和分析提供了重要的依据。
虚功原理的应用非常广泛,它可以用于分析各种类型的结构,包括梁、柱、桁架等。
在工程实践中,虚功原理常常被用于分析复杂结构的受力性能,比如钢结构、混凝土结构等。
通过虚功原理的分析,可以得到结构的内力分布、变形情况,为结构的设计和施工提供了重要的参考依据。
除此之外,虚功原理还可以用于结构的优化设计。
通过对结构受力性能的分析,可以找到结构的薄弱环节,进而对结构进行合理的优化设计,提高结构的受力性能和使用效率。
这对于工程结构的安全性和经济性都具有重要意义。
总的来说,结构力学虚功原理是结构力学中的重要理论工具,它通过能量方法来分析结构的受力性能和变形规律,为工程结构的设计、分析和优化提供了重要的理论依据。
在工程实践中,虚功原理的应用具有重要的意义,可以帮助工程师更好地理解和分析结构的受力性能,为工程结构的设计和施工提供重要的参考依据。
通过对虚功原理的深入研究和应用,可以推动结构力学理论的发展,为工程结构的安全性和经济性提供更好的保障。
有限元分析法第3章 杆单元
提示: 1)本例中单元应力的计算采用了材料力学中的方法,与采 用有限元单元应力公式 E EBd 的结果相同。 2)对锥形杆,单元截面积可用平均值。 3)求应力之前需要求出节点位移——有限元位移法。
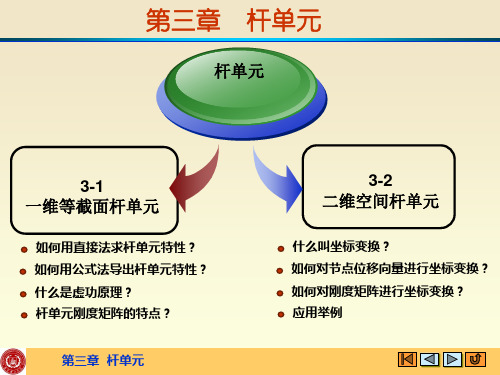
第三章
杆单元
§ 3 –1
习题2:
一维等截面杆单元
已知:
求:杆两端的支反力
解
第三章 杆单元
u2
v2 u3 v3
1 1 1 1 EA 1 1 1 1 2 L 1 1 1 1 1 1 1 1
第三章 杆单元
§ 3 –2
二维空间中的杆单元
将单元1,2的刚度方程扩张到系统规模(6阶), 相加后引入节点平衡条件:
第三章
杆单元
§ 3 –2
0 1 0 0 0 1 1 0 1 1 1 0
u1 v1 u2
v2
1 1 1 1 EA 1 1 1 1 2 L 1 1 1 1 1 1 1 1
第三章 杆单元
§ 3 –2
单元2:2-3
135,l
按公式计算杆应力:
二维空间中的杆单元
得:
0 E 2 L 0 1 1 1 1 2 ( P1 P2 ) 1 L 2 EA P 2A 1 P2
P 1 E 2 L P2 1 1 1 1 2 ( P1 P2 ) 2 L 2 EA 0 2 A 0
第三章
杆单元
§ 3 –2
二维空间中的杆单元
节点位移向量的坐标变换:
~ d i Tdi
第三章
杆单元
§ 3 –2
二维空间中的杆单元
结构力学虚功原理
结构力学虚功原理
结构力学虚功原理是指在静力学分析中,结构平衡的条件可以通过能量守恒原理来表示。
根据虚功原理,结构在任何形变状态下,受力系统所作的虚功等于外界对结构所做的虚功。
虚功是指由于结构内部力引起的位移所做的功。
根据虚功原理,结构的平衡可以通过计算结构内部力引起的位移所做的功来判断。
具体而言,可以通过计算结构每个构件上的受力与位移的乘积,然后将它们求和,得到结构内部力所作的总虚功。
如果结构处于平衡状态,则结构受力与位移之积的总和为零。
虚功原理的应用非常广泛。
它可以用于计算结构的位移、应力、应变等重要参数。
例如,在弹性力学中,可以利用虚功原理求解结构的位移和应力分布。
在塑性力学中,虚功原理可以用来分析结构在超过弹性极限后的变形情况。
此外,虚功原理还可以用于分析非线性和非弹性结构的行为。
通过应用虚功原理,可以对结构进行静态分析和设计。
静态分析可以确定结构在受力条件下的平衡状态,进而计算各个构件的受力和位移。
静态设计可以根据结构的受力和位移要求,确定结构的尺寸和材料,以满足结构的强度和刚度要求。
总之,结构力学虚功原理为结构分析和设计提供了重要的理论基础。
通过虚功原理,可以建立结构平衡的数学模型,计算结构的位移、应力和应变等关键参数,为工程实践提供了可靠的理论支持和设计方法。
第3章 有限元分析的数学求解原理-三大步骤
U x x y y z z xy xy yz yz zx zx dV
X u Y v Z w dV X u Y v Z w d W
V V
用 * 表示;引起的虚 应变分量用 * 表示
j Vj
Ui
i Vi
0 X
y
¼ 1-9 Í
ui* * vi wi* * * u j , v* j w*j
x* * y * z * * xy *yz * 18 zx
19
7.间接解法:最小势能原理
20
最小势能原理
W U 0
最小势能原理就是说当一个体系的势能最小时,系统会处于稳定 平衡状态。或者说在所有几何可能位移中,真实位移使得总势能取最小值
0 表明在满足位移边界条件的所有可能位移 最小势能原理: 中,实际发生的位移使弹性体的势能最小。即对于稳定平衡状态,实 际发生的位移使弹性体总势能取极小值。显然,最小势能原理与虚功 原理完全等价。 n m
虚功原理的矩阵表示
在虚位移发生时,外力在虚位移上的虚功是:
* 式中
U i u i* V i v i* W i w i* U j u *j V j v *j W j w *j
* 是 的转置矩阵。
T
*
F
T
同样,在虚位移发生时,在弹性体单位体积内,应力在虚应变上的虚 功是: * * * * * * * T x x y y z z xy xy yz yz zx zx
27
⑴解析法
虚功原理 有限元

虚功原理有限元虚功原理是力学中的一个基本原理,它是运用能量守恒原理和虚位移原理进行问题求解的一种方法。
虚功原理的应用十分广泛,特别是在有限元方法中,它是解答复杂结构力学问题的一种常用手段。
虚功原理的基本原理是:在刚体或弹性体的力学问题中,力系对于结构的作用机理可以使用能量方法来描述,即外力对物体所做的功等于内力弹性势能的变化。
在有限元方法中,虚功原理的应用可以被概括为以下几个步骤:1. 确定系统的弹性势能表达式:根据材料力学性质和结构几何形状,建立并表达出结构的弹性势能。
2. 设定虚位移场:在结构的静力平衡方程中,引入一组满足边界条件的虚位移场,并将结构的位移表示为真实位移与虚位移的叠加。
虚位移场是一个理想化的假设,它用于引导计算的进行。
3. 计算虚功:将虚位移场代入弹性势能表达式中,得到每个单元的虚功。
4. 构造系统的刚度方程:根据虚功原理,对每一个虚位移方向进行变分,得到相应的虚功。
将这些虚功累加起来,并考虑结构边界条件和约束条件,得到整个系统的刚度方程。
5. 解刚度方程:使用适当的数值方法(如矩阵求解方法)求解刚度方程组,得到结构的位移响应。
6. 计算应力和应变分布:利用位移响应,通过一定的插值方法,计算出结构各点的应力和应变分布。
有限元方法利用虚功原理的优点在于,它可以解决复杂结构的力学问题,并且可以处理非线性材料、大变形和大变位等情况。
虚功原理的运用使得有限元方法成为求解工程结构问题的一种强大工具。
需要注意的是,在使用虚功原理时,应注意选择合适的虚位移场,并保证其满足结构的边界条件和约束条件;同时,还需要进行适当的数值技巧处理,如选择合适的数值积分方法和数值求解方法,以提高计算的精确性和效率。
总结来说,虚功原理是有限元方法求解问题的基础,它通过能量守恒原理和虚位移原理,将原问题转化为求解刚度方程的问题,从而得到结构的位移响应和应力应变分布。
虚功原理在结构力学中的应用是十分重要和广泛的,它为工程问题的解答提供了有效的途径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( { })
* x
u = ∫ ε σdV = ∫ [B ] V V u
T
* 1 * 2
E [B ] δ x dV = ∫ δ
V
{ }
u1 E [B ] dV u 2
T
{ } [B]
* x T
T
E [B ] δ x dV
{ }
[K ]
(e)
1 0 AE = L − 1 0
0 − 1 0 0 0 0 0 1 0 0 0 0
小结: (1)本章从设置位移函数(也称为位移插值函 数或试探函数)出发,利用虚功原理导出了局 部坐标系下的杆单元的有限元计算格式,利用 前一章的坐标变换矩阵[T],就可以将它转换到 整体坐标系下,然后将各单元的刚度矩阵按照 节点力平衡的原理,经过叠加,即可得到总体 刚度矩阵。 (2)本章的方法具有一般性。 (3)位移插值函数的选择与单元节点的数目有 关。一般不可能精确描述单元内各点真实的位 移情况。
Fy(1e ) 0 0 v 1 = (e) Fy 2 0 0 v 2
下面建立 x 方向位移的插值函数。 设杆件内任意一点沿 x 的位移向量为
δ x = u = α1 + α 2 x
第三步:求单元内任意一点的位移与节点位移的 关系 由 x1 = 0, u = u1 ; x 2 = L, u = u 2 可写出
3 杆件结构的有限元法—虚功原理 直接刚度法:已知杆件刚度,利用位移和 力的关系,建立单元刚度矩阵。 不知道力——位移的关系,怎样求解? 本章介绍一种更为一般的有限元求解力学 问题的方法:虚功原理推导杆单元刚度 矩阵。
这一方法分为6步。 第一步:建立局部坐标系,写出单元的位移向量 和节点力向量。
y
第四步:求应变—位移—节点位移的关系 单元内任意一点的应变可以通过对该点的位移的 微分得到,并最终表示为单元的节点位移
0 u1 α 1 1 du = α 2 = [0 1] = [0 1] ε x = dx − 1 L 1 L u 2 α 2
()
{ } 和{F } 的表达式合写在一起就是 {F }= [K ]{δ }
(e ) y
(e)
(e)
其中
{F }
(e)
Fx(1e ) (e) F y1 = (e) Fx 2 F (e) y2
{}
u1 v1 δ = u 2 v 2
v1
v2
u1 u2
o
1
x
2
局部坐标系下的节点力 和位移
节点的位移向量和力向量为
{ } [F ] { }
(e)
F1( e ) = (e) F2
Fx(1e ) (e) F y1 = (e) Fx 2 F (e) y2
u1 1 0 α 1 α 1 = α = [A]α 2 u 2 1 L 2
由此可得
0 u1 α 1 1 −1 u1 = [ A] = α 2 u 2 − 1 L 1 L u 2
{} [] { }
u1 δ 1 v1 δ = = δ 2 u 2 v 2
因为向量包含四个分量,所以单元刚度矩阵 K (e ) 应该是 4 × 4 阶的。
[ ]
第二步:选择适当的位移函数 单元内的位移函数,也称为插值函数或试探函数。 它应满足单元的边界条件。 一般常选择多项式作为位移函数。多项式的项数 与单元节点数和节点处的假设已知条件数有关。 因为杆单元沿 方向没有位移,也没有对应的 y 力,所以可以直接写出两者的关系为
Wext = δ
{ } {F } {δ }
* x T (e) x
* x
u * 1 = * u 2
{F }
(e) x
Fx(1e ) = (e) Fx 2
ε * ,则内应 设系统的初始内应力为0,虚应变为
力所做的功为
Win t
*
= ∫ [B ] δ
根据虚功原理 有*Fra bibliotekx TWin t = Wext
T
{δ } {F }= ∫ {δ } [B]
(e) x V * x
T
E [B ] δ x dV
{ }
两边消去 δ
(e) x
{F }= ∫ [B]
V
{ }
* x
T
T
E [B ] δ x dV = ∫ [B ] E [B ]dV δ x
T V
{ }
{ }
u1 u1 = [− 1 L 1 L ] = [B ] u 2 u 2
第五步:求应力—应变—节点位移间的关系
u1 u1 σ = Eε = E [B ] = E [− 1 L 1 L ] u 2 u 2
第六步:节点位移和节点力的关系 虚功原理:外力在虚位移上所做的功,等于内应 力在相应虚应变上所作的功。 外力在虚位移上所做的功为
即 其中
{F }= [K ]{δ }
(e) x (e) x x
[K ] = ∫ [B] E[B]dV = [B] E[B]∫ dV
(e) x T T V V
− 1 L EA 1 − 1 = E [− 1 L 1 L ]AL = L − 1 1 1L
将 Fx(e )