车速里程表的工作原理及速比的计算方法
汽车速度里程表的设计原理

汽车速度里程表的设计原理一、机械车速里程表的设计原理机械车速里程表是一种传统的车速里程表,广泛应用于各种汽车中。
它主要由蜗轮、蜗杆、里程表芯和车速表等部件组成。
速度测量:机械车速里程表通过车轮上的蜗轮和蜗杆装置测量汽车速度。
蜗轮和蜗杆之间的传动关系使得车轮的转速与蜗轮的转速成一定比例。
根据这个比例关系,就可以计算出汽车的速度。
里程测量:机械车速里程表利用里程表芯来测量汽车的行驶里程。
里程表芯由一系列的齿轮组成,与车轮的齿数相对应。
当车轮转动时,齿轮带动里程表芯的指针转动,从而显示汽车的行驶里程。
二、电子车速里程表的设计原理电子车速里程表是一种现代化的车速里程表,它采用电子传感器和微处理器技术来测量和显示汽车速度和行驶里程。
速度测量:电子车速里程表通过在车轮上安装电子传感器来测量汽车速度。
传感器将车轮的转速转换成电信号,然后传输给微处理器进行处理。
微处理器根据传感器输入的信号计算出汽车的速度,并将其显示在仪表盘上。
里程测量:电子车速里程表利用内置的编码器或GPS信号来测量汽车的行驶里程。
编码器通过监测车轮的转动圈数来计算行驶里程,而GPS信号则通过接收卫星信号来确定车辆的位置和行驶轨迹,从而计算出行驶里程。
三、机械车速里程表与电子车速里程表的比较优缺点比较:机械车速里程表结构简单、维护方便、成本低,但精度相对较低,且易受机械磨损和误差影响。
电子车速里程表精度高、反应速度快、可实现多种功能(如行驶里程、平均速度等),但结构复杂、成本较高。
应用建议:对于一般经济型轿车,机械车速里程表足够满足使用需求;而对于中高档轿车或需要实现更多功能的车载信息系统,电子车速里程表则更具优势。
此外,在特殊应用场景(如赛车或其他需要高精度测速的场合)中,电子车速里程表也具有较大优势。
综上所述,机械车速里程表和电子车速里程表各有优缺点,应根据车辆类型、价格和应用需求等因素进行选择和使用。
速度里程表原理

速度里程表原理
速度里程表是一种用于测量车辆行驶速度和里程的仪表。
其原理基于车轮转动和机械传动的关系。
速度里程表的工作原理可以简单描述为:当车辆行驶时,车轮带动一个机械装置转动,该装置通过一系列齿轮和传动杆与速度里程表相连。
车轮每转动一定角度,机械装置会发出信号,以告知里程表记下一单位里程。
同时,根据车轮的转动速度,里程表还可以计算出车辆的速度。
在速度里程表内部,通常会有一个读数装置,用于将转动的机械装置的运动转化为相应的数字显示。
该装置可以通过齿轮的转动来驱动数字指针或液晶显示屏,显示车辆的行驶速度和里程。
速度里程表需要根据车辆的特定参数进行校准,以确保显示的速度和里程的准确性。
一般来说,校准包括设置车辆的轮胎尺寸和车速传感器的脉冲输出。
这些参数的准确输入对于正确的车速和里程显示至关重要。
总结起来,速度里程表通过车轮转动带动机械装置,将车辆行驶里程和速度转化为数字显示。
根据车轮的转动角度和速度,里程表可以准确地测量车辆的行驶速度和里程数。
汽车车速里程表原理
汽车车速里程表原理车速里程表是汽车上的一个重要仪表,它可以显示汽车的速度和行驶里程,是驾驶员在行驶过程中的重要参考。
那么,汽车车速里程表是如何工作的呢?本文将从原理和结构两个方面来介绍汽车车速里程表的工作原理。
首先,我们来看一下汽车车速里程表的原理。
汽车车速里程表的原理是利用车轮的转动来测量车辆的速度和行驶里程。
当车辆行驶时,车轮会不断地转动,车速里程表通过感知车轮的转动次数来计算车辆的速度和行驶里程。
一般来说,车速里程表会通过传感器感知车轮的转动,然后将转动次数转换成速度和里程的显示。
其次,我们来了解一下汽车车速里程表的结构。
汽车车速里程表一般由传感器、计算模块和显示模块组成。
传感器负责感知车轮的转动次数,然后将这些数据传输给计算模块。
计算模块会根据传感器传来的数据进行计算,然后将计算结果传输给显示模块。
显示模块则负责将计算结果显示在仪表盘上,供驾驶员观察。
在汽车车速里程表的工作过程中,传感器起到了感知车轮转动的作用,是整个系统的输入端;计算模块是整个系统的核心,负责处理传感器传来的数据并进行计算;显示模块则是整个系统的输出端,负责将计算结果显示在仪表盘上。
这样的结构设计使得汽车车速里程表能够准确地显示车辆的速度和行驶里程。
总的来说,汽车车速里程表的工作原理是利用车轮的转动来测量车辆的速度和行驶里程,其结构包括传感器、计算模块和显示模块。
通过这些组成部分的协作,汽车车速里程表能够准确地显示车辆的速度和行驶里程,为驾驶员提供了重要的参考信息。
以上就是关于汽车车速里程表的原理和结构的介绍,希望能够对大家有所帮助。
汽车车速里程表在驾驶过程中扮演着重要的角色,它的准确性和稳定性对驾驶员的行车安全和驾驶体验都有着重要的影响。
因此,在日常使用中,我们应该注意保养和维护车速里程表,确保其能够正常工作。
车速测量方法
车速测量方法一、概述车速测量是指在行驶过程中,测量车辆的速度。
车速测量方法有多种,包括机械式、电子式、光学式等。
本文将介绍几种常见的车速测量方法及其原理。
二、机械式车速测量方法1. 车轮直径法原理:根据车轮直径和转数计算出车辆的速度。
步骤:(1)确定车轮直径。
(2)使用计数器或转子来记录每个轮子的转数。
(3)根据公式:车速=2×π×轮子半径×转数÷时间,计算出车辆的速度。
2. 里程表法原理:根据里程表上显示的里程和时间来计算出车辆的平均速度。
步骤:(1)安装一个能够记录行驶距离和时间的里程表。
(2)根据公式:车速=行驶距离÷行驶时间,计算出车辆的平均速度。
三、电子式车速测量方法1. GPS定位法原理:利用GPS卫星定位系统来确定汽车位置,并通过比较两个位置之间所需的时间来计算汽车的平均速度。
步骤:(1)安装一个GPS接收器。
(2)使用GPS接收器记录车辆的位置和时间。
(3)根据公式:车速=两个位置之间的距离÷两个位置之间所需的时间,计算出车辆的平均速度。
2. 车载测速仪法原理:车载测速仪是一种电子设备,能够通过轮速传感器或其他传感器来测量车辆的速度。
步骤:(1)安装一个车载测速仪。
(2)使用轮速传感器或其他传感器来测量车辆的速度。
(3)根据车载测速仪上显示的数据来计算出车辆的平均速度。
四、光学式车速测量方法1. 雷达测速法原理:雷达发射器向前发射一束微波信号,当这束信号碰到汽车时,会反弹回来。
通过比较发射和回波之间的时间差来计算汽车的平均速度。
步骤:(1)安装一个雷达发射器和接收器。
(2)将雷达朝向汽车行驶方向,并启动雷达发射器。
(3)比较发射和回波之间的时间差,并根据公式:车速=距离÷时间,计算出车辆的平均速度。
2. 激光测速法原理:激光测速仪向汽车发射一束激光,当激光碰到汽车时,会反射回来。
通过比较发射和回波之间的时间差来计算汽车的平均速度。
车速里程表信号装置及速比的计算
车速里程表信号装置及速比的计算
刘伟锋;彭立印;韦博
【期刊名称】《汽车维修》
【年(卷),期】2011(000)010
【摘要】车速里程表是由指示汽车行驶速度的车速表和记录汽车所行驶过距离的里程计组成的。
目前有机械式和电子式两种。
【总页数】2页(P8-9)
【作者】刘伟锋;彭立印;韦博
【作者单位】陕西法士特齿轮有限责任公司;陕西法士特齿轮有限责任公司;陕西法士特齿轮有限责任公司
【正文语种】中文
【中图分类】U463.71
【相关文献】
1.车速里程表的工作原理及速比的计算方法
2.车速里程表的工作原理及速比的计算方法
3.车速里程表的工作原理及速比的计算方法
4.车速里程表的工作原理及速比的计算方法
5.汽车车速里程表及其速比的计算方法
因版权原因,仅展示原文概要,查看原文内容请购买。
仪表算法
所以此仪表频率与速度的对应关系:
f 9720V 3600
合肥晟泰克汽车电子有限公司
仪表算法
根据此仪表频率与速度的对应关系算出以下数据:
从测试来看仪表显示始终比车子本身实际速度要大,这是国标要求的。视频 根据这个算法我们优化了工装的算法,得出一个结果。仪表上显示的里
I
12 1215
23.14 0.479
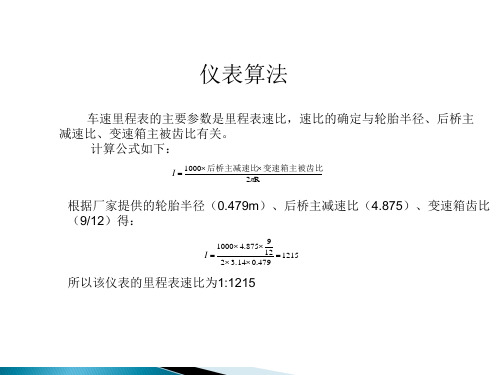
所以该仪表的里程表速比为1:1215
合肥晟泰克汽车电子有限公司
仪表算法
对于里程表速度传感器,传动杆转一圈会产生8个脉冲。所以得出仪表的PPK 为(PPK是指车子在1km/h 时所对应的脉冲数):
12158 9720
根据PPK可以算出频率与速度的对应关系:
合肥晟泰克汽车电子有限公司
仪表算法
车速里程表的主要参数是里程表速比,速比的确定与轮胎半径、后桥主 减速比、变速箱主被齿比有关。
计算公式如下:
I 1000后桥主减速比变速箱主被齿比 2R
根据厂家提供的轮胎半径(0.479m)、后桥主减速比(4.875)、变速箱齿比 (9/12)得:
1000 4.875 9
程是根据实际
车速里程表信号装置及速比的计算-汽车电子
登录车速里程表示迟钝或错误指示。
另外,由于整车布置方案不同,不同车型要求有相应规格的软轴,由于钢丝在软轴中的伸缩和摩擦以及连接方轴的磨损,当汽车行驶时,里程表被动齿轮驱动电子里程表传感器内的磁钢作圆周运动,磁钢每转一周,电子里程表传感器就输出N个(一般为8个或10个)脉冲信号,经连接线束传给车速里程表。
他与机械式车速里程表相比,最主要是用传感器取代了软轴,克服了机械式车速里程表指针摆动,软轴易断的缺点,被广泛应用在国内商用车行业。
另一种是经过电线束和装在变速器后轴承盖上的电子里程表传感器连接在一起,我们称这种电子里程表传感器为非接触式电子里程表传感器,见图2所示。
传感器探头与里程表转子之间有一定的间隙,这个间隙一般控制在1.4±0.6mm。
当汽车行驶时,里程表转子与变速器输出主轴一起转动,当里程表转子的某一个齿转动到传感器探头对应的位置时,探头中的敏感器件受到里程表转子磁场作用输出一个低电平,当里程表转子的齿没有与传感器探头对准,探头中的敏感器件没有受到磁场作用而输出高电平。
这样变速器输出轴每转动一周,里程表传感器就有8 个方波脉冲信号输出,经连接线束传给车速里程表。
因为他没有里程表主、被动齿轮实际速比与理论速比之间的误差而产生的整车车速与里程的误差,因此车速里程表指示读数较前两种更准确。
而且互相接触的传动部件减少,损坏率与成本均减少。
所以在国内商用车行业正在被推广并广泛使用。
二、速比的计算由此可得:因为里程表速比ie 为里程表主动齿轮与被动齿轮之间的传动比,即:比i ,选择不同的Z1 值(一般取3~9),并且根据《GB7258-2004 机动车安全技术条件》汽车车速表指示车速不得低于实际车速,使i 必须满足:社区讨论。
汽车里程工作原理

汽车里程工作原理
汽车里程工作原理描述了一个汽车如何测量和显示其行驶的距离。
这个过程依赖于车辆的速度传感器和车轮的旋转。
当汽车行驶时,车辆上的速度传感器会感知车轮的旋转速度。
传感器发出的信号会被发送到汽车的电子控制单元(ECU)。
ECU会根据传感器发出的信号计算车辆的速度,并将此信息
存储在车辆的仪表盘里程计中。
车轮的旋转速度与车辆行驶的距离成正比。
因此,当车轮旋转的次数增加时,行驶的距离也会增加。
ECU以每分钟旋转次
数(RPM)的形式测量车轮的旋转速度。
然后,通过乘以轮
胎的周长,即可计算出车辆的行驶距离。
在车辆的仪表盘上,里程计会将行驶距离以公里或英里的形式显示出来。
这些里程计的读数是根据存储在ECU中的数据计
算出来的。
所以,只要车子行驶,里程计的读数就会不断增加。
需要注意的是,汽车里程计是基于车轮的旋转来测量行驶距离的。
因此,在某些情况下,如胎压过低或更换了不同尺寸的轮胎,都可能导致里程计的读数不准确。
此外,里程计也可以通过欺骗ECU来篡改行驶距离的读数,因此需要谨慎对待。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车速里程表的工作原理及速比的计算方法
车速里程表与水温表一起,成为汽车用组合仪表上最重要的两个仪表。
车速里程表有机械式和电子式两种,右图所示为磁感应式车速里程表的结构简图,它由车速表和里程表两部份组成。
一、车速里程表的结构及工作原理
(一)机械式车速里程表
车速表主要由与主动轴固定在一起的U形永久磁铁、带有转轴与指针6的铝罩、罩壳、固定在车速里程表外壳上的刻度盘5等组成。
主动轴由变速器或分动器传动蜗杆经软轴驱动。
不工作时,盘形弹簧4使指针6处于刻度盘的零位。
当汽车行驶时,变速箱上蜗轮组件中的蜗杆带动里程表软轴旋转,再由软轴带动主动轴旋转,从而使主动轴上的永久磁铁1跟着旋转。
由于蜗杆与软轴及车速里程表主动轴紧密连接在一起,它们的转速相同。
永久磁铁的磁力线在铝罩上产生涡流,涡流产生的磁场与旋转的永久磁铁磁场相互作用产生转矩,使铝罩克服盘形弹簧的弹力向永久磁铁1旋转的方向旋转,直至与盘形弹簧弹力相平衡。
车速越高,永久磁铁1旋转越快,转矩越大,使铝罩2带动指针6偏转的角度越大,车速的指示值越高。
里程表由蜗轮蜗杆机构和数字轮组成。
汽车行驶时,主动轴经3对蜗轮蜗杆驱动里程表最右边的第一数字轮,使第一数字轮上和数字显示1/10Km。
从第一数字轮向左,每两个相邻的数字轮之间,又通过本身的内齿和进位数字轮传动齿轮,形成1:10的传动比。
当第一数字轮转动一周,由9转到0时,由内传动齿拔动左侧第二个数字轮转动1/10圈,形成1Km数递增;当第二数字轮转动一周,由9转到0时,其左侧第三个数字轮转动1/10,以10Km数递增。
其余数字轮由低位到高位的显示,计数方式均依次类推,即可显示汽车行驶里程数。
(二)电子式车速里程表
车速表由车速传感器(安装在车轮上变速箱蜗轮组件的蜗杆上,有光电耦合式和磁电式)、微机处理系统和显示器组成。
由传感器传来的光电脉冲或磁电脉冲信号,经仪表内部的微机处理后,可在显示屏上显示车速。
里程表则根据车速以及累计运行时间,由微机处理计算并显示里程。
二、组合仪表速比的计算方法
(一)速比的定义
对机械式或传感器安装在变速器上的蜗轮组件的车速表来说,所指示车速与变速器蜗杆的转速之比即为速比。
例如,车速表上的读数为60Km/h之时, 变速器蜗杆的转速为36000r/h,则仪表速比为60:3600=1:600。
也就是说,当车速表上的读数显示为1Km/h之时,变速箱蜗杆的转速必须为600 r/h。
(二)求组合仪表的理论速比
理想状态下,即车速表上显示的读数与实测速度相等的情况下,所计算出来的速比称为理论速比,
其计算公式为K=1:[(k1/k2)×1000/(2πR)],K为理论速比,k1为后桥主减速比,k2为变速箱蜗轮组件的传动比,R为轮胎的滚动半径。
以下举一个例子来说明如何计算组合仪表的理论速比:
某轿车相关参数为:后桥主减速比5.125,变速箱蜗轮组件的传动比(即蜗轮转速与蜗杆转速之间的比值)14/3,轮胎型号为165/70R13LT 8PR 90/88Q,查《汽车标准汇编第五卷转向车轮其它》中的
《GB/T2978-1997 轿车轮胎系列》得轮胎滚动半径为273mm=0.273m。
K=1:[(k1/k2)×1000/(2πR)]=1:[(5.125/(14/3))×1000/(2×3.14×0.273)]=1:640.6 ,该速比即为所求的理论速比。
(三)求组合仪表的实际速比
如果按照理论速比来设计组合仪表,车速表往往会出现速度超差的现象,导致实测速度V2大于车速表读数V1,这是安全法规所不允许的。
根据《GB7258-20004 机动车安全运行技术条件》中的4.12条,车速表指示车速V1(单位:Km/h)与实测车速V2(单位:Km/h)之间应符合下列关系式:0 ≤V1-V2 ≤(V2/10)+4,由此公式可得符合条件的实测速度值如下表所示:
为了安全起见,必须选定一个实际速比,使V2<V1,且符合《GB7258-20004 机动车安全运行技术条件》。
此处,选定一个速比K1,使仪表读数为100Km/h之时,实测速度为95Km/h。
由V1/V2=K1/K得,K1=K (V1/V2)=(1/640.6)(100/95) ≈1:609,当仪表读数V1=40Km/h,实测车速V2=V1K/K1=40×(1/640.6)/(1/609) ≈38(Km/h),同理可算出当仪表读数V1分别为60 Km/h,80Km/h,120Km/h,实测速度V2分别为57 Km/h,76.1 Km/h,114.1 Km/h。
可见所选实际速比K1符合法规要求,可作为该款轿车的组合仪表的速比。
当然,也可选其它速比,但根据所选速比计算出的实测车速要在上表的范围之内。