基于图像处理的高速公路汽车防追尾系统研究
我国成功研发基于图像处理技术的汽车安全系统

在 站 内发 电避 免 或 减 少 输 配 电损 失 等 多 种优 点 , 且 还 不 会 而 造 成 温 室 气 体 排 放 ,具 有 良好 的环 境 效 益 。 该 系 统 的 稳 定 运 行 , 一 步 提 高 了 站 内 照 明 系 统 乃 至 整 进 个 站 级 辅 助 系 统 电源 的供 电可 靠 性 、可 用 性 。同 时 ,该 系 统 在 国家 电网 首 座 5 0千 伏 智 能 变 电站 的 尝试 , 递 了 一 种 节 0 传 能 、环 保 、绿 色 的建 设 理 念 ,为 今 后 太 阳 能 光 伏 发 电在 智 能 电 网 内的 进 一 步 推 广 应 用 提 供 了 良好 示 范 。 ( 技 日报 ) 科
将 相 撞 的 车辆 擦 身 而 过 … … 驾驶 员 能 如 此 临 危 不 乱 果 断 处 置 , 要 是得 益 于 南 京 理 主 工 大 学 计 算 机 科 学 与 技 术 学 院研 发 的 “ 于 视 觉 资 讯 处 理 基 的 车 辆 主 动 安 全 核 心 技 术 ” 。4 月 1 日,记 者 在 南 理 工 亲 9
停的线路 ”。因其唯一,线路 的带 电作业就 没有任 何先例 可 寻,必须面临一系列全新 的技术挑战 。 记 者 今 天 下 午 在 现 场 看 到 , 国 网 中 国 电科 院和 山 东 电 由
力 集 团 超 高 压 公 司 合 作 开 展 的此 次 开创 性 作 业 , 后 历 经 近 前
传感 器获取车外环境信息 ,特别是车前大约 8 0度视角区域 及 车 两侧 后 视 大 约 6 O度 视 角 区 域 ,针 对 汽 车行 驶 过 程 中 可 能 出 现 的 车 辆 偏 离 行 车 道 的 危 险 以及 变 道 时 盲 区 车 辆 接 近
基于图像处理技术的智能交通事故监测与预警
基于图像处理技术的智能交通事故监测与预警智能交通事故监测与预警系统在现代城市交通管理中发挥着重要的作用。
借助图像处理技术的应用,这一系统可以有效地监测交通路段上的事故情况,并及时发出预警,提供给交通管理部门和用户参考,以减少事故的发生和对交通流量的影响。
智能交通事故监测与预警系统基于图像处理技术的开发,具备了高效、准确的特点。
通过摄像机捕捉到的交通路段图像,系统可以实时对图像进行处理和分析,以识别出交通事故的相关特征。
例如,系统可以判断交通事故是否发生以及发生事故的位置、时间和车辆类型等信息。
此外,智能交通事故监测与预警系统还可以根据交通事故的严重程度,及时发出预警信息,提醒交通管理部门和驾驶员采取相应的措施,以避免事故的进一步发展。
在实现交通事故监测与预警的过程中,图像处理技术起到了关键的作用。
首先,系统需要对交通路段图像进行实时监测和分析。
通过将图像转换为数字数据,系统可以利用图像处理算法来提取图像中的交通信息,并检测是否存在异常情况。
例如,图像处理技术可以识别出车辆的运行轨迹和速度信息,以判断是否存在交通违法行为或潜在的事故隐患。
其次,系统还需要利用图像处理技术对交通事故的发生进行准确的识别和分类。
通过训练机器学习模型,系统可以学习不同事故类型的特征,并根据图像数据对事故进行分类。
除了交通事故监测外,智能交通事故预警系统还可以提供更多的交通信息和服务。
例如,系统可以根据交通图像数据对交通流量和车辆拥堵情况进行实时监测和分析,以辅助交通管理部门优化交通信号控制和交通规划。
此外,系统还可以利用图像处理技术对道路设施进行检测和维护,例如检测道路标线的损坏和路面的破损程度,以及及时发出维修请求。
为了有效地运行智能交通事故监测与预警系统,还需要建立高效的工作机制和数据管理系统。
首先,系统需要与交通管理部门和相关部门建立紧密的合作关系,以共享交通数据和相应的处理结果,并协同处理交通事故和拥堵情况。
其次,由于系统会收集大量的交通图像数据,需要建立有效的数据管理系统,包括数据采集、存储、处理和分析,同时确保数据的安全性和隐私保护。
基于图像识别的汽车智能防撞系统研究与实现
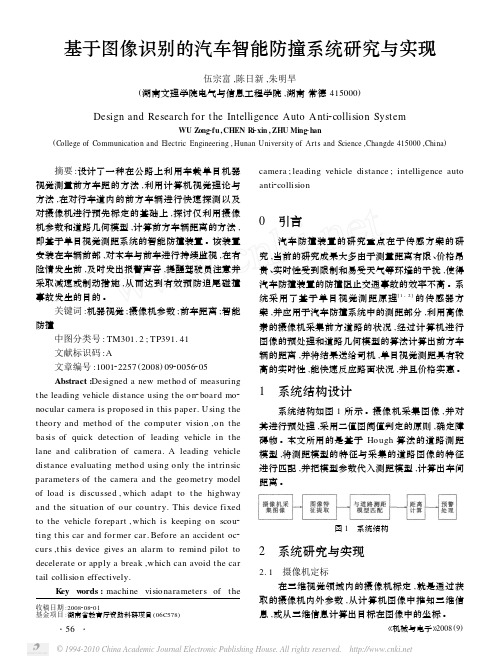
基于图像识别的汽车智能防撞系统研究与实现伍宗富,陈日新,朱明旱(湖南文理学院电气与信息工程学院,湖南常德415000)Design and Research for t he Intelligence Auto Anti 2collision SystemWU Zong 2fu,CHEN Ri 2xin ,ZHU Ming 2h an(College of Communication and Electric Engineering ,Hunan University of Arts and Science ,Changde 415000,China ) 摘要:设计了一种在公路上利用车载单目机器视觉测量前方车距的方法,利用计算机视觉理论与方法,在对行车道内的前方车辆进行快速探测以及对摄像机进行预先标定的基础上,探讨仅利用摄像机参数和道路几何模型,计算前方车辆距离的方法,即基于单目视觉测距系统的智能防撞装置。
该装置安装在车辆前部,对本车与前车进行持续监视,在有险情发生前,及时发出报警声音,提醒驾驶员注意并采取减速或制动措施,从而达到有效预防追尾碰撞事故发生的目的。
关键词:机器视觉;摄像机参数;前车距离;智能防撞中图分类号:TM301.2;TP391.41文献标识码:A文章编号:100122257(2008)0920056205收稿日期:2008208201基金项目:湖南省教育厅资助科研项目(06C578)Abstract :Designed a new met hod of measuring t he leading vehicle distance using t he on 2board mo 2nocular camera is proposed in t his paper.U sing t he t heory and met hod of t he comp uter vision ,on t he basis of quick detection of leading vehicle in t he lane and calibratio n of camera.A leading vehicle distance evaluating met hod using only t he int rinsic parameters of t he camera and t he geomet ry model of load is discussed ,which adapt to t he highway and t he sit uation of our count ry.This device fixed to t he vehicle forepart ,which is keeping on scou 2ting t his car and former car.Before an accident oc 2curs ,t his device gives an alarm to remind pilot to decelerate or apply a break ,which can avoid t he car tail collision effectively.K ey w ords :machine visionarameters of t hecamera ;leading vehicle distance ;intelligence auto anti 2collision0 引言汽车防撞装置的研究重点在于传感方案的研究,当前的研究成果大多由于测量距离有限、价格昂贵、实时性受到限制和易受天气等环境的干扰,使得汽车防撞装置的防撞阻止交通事故的效率不高。
基于图像处理技术的智能交通管制系统研究
基于图像处理技术的智能交通管制系统研究第一章研究背景与意义近年来,随着城市化进程的不断加速和汽车保有量的不断增长,交通拥堵、交通事故、环境污染等问题日益凸显。
传统的城市交通管制手段主要依靠人工部署、信号灯控制等方式,存在着人工处理效率低、响应速度慢等不足。
而随着计算机技术、图像处理技术等领域的不断发展,智能交通管制系统逐渐成为了解决交通问题的新手段,被广泛应用于交通管理领域。
基于图像处理技术的智能交通管制系统,凭借着其高效、精准、无需人工干预等特点,已经成为当今智能交通管理的主流技术手段之一。
本文旨在对基于图像处理技术的智能交通管制系统进行研究,探讨其应用、实现、技术等相关问题,为交通管理的科学化、智能化提供理论支撑和技术保障。
第二章技术原理2.1 图像采集智能交通管制系统中,图像处理技术的应用离不开图像采集技术的支持。
常见的图像采集设备有摄像机、雷达、传感器等。
其中,摄像机是应用最为广泛的图像采集设备,它能够对交通路段进行全方位、多角度的全天候拍摄,并将图像传输至后台进行处理。
2.2 图像预处理图像采集设备会受到诸多因素的干扰,例如光线、抖动、车流等,这些因素都会影响到图像质量。
因此,在进行图像处理之前,需要对采集的图像进行预处理。
主要包括去噪、增强、图像拼接等操作,以提高图像的清晰度和准确性。
2.3 特征提取特征提取是智能交通管制系统的核心技术之一,它主要是对交通目标进行分类和识别。
常见的交通目标包括车辆、行人、自行车等。
特征提取主要包括图像分割、目标检测、目标识别等操作。
通过对交通目标的特征提取,能够快速地对交通目标进行分类和识别。
2.4 监测与控制智能交通管制系统中,图像处理技术主要应用于交通监测与控制。
通过对采集的图像进行处理和分析,可对交通路段进行监测和控制。
例如,在路口设置智能交通信号灯控制系统,通过监测路口交通情况,自动调整信号灯,实现快速疏导交通、缓解拥堵的目的。
第三章应用实践3.1 车流管理基于图像处理技术的智能交通管制系统在车流管理方面具有非常重要的应用价值。
红外图像处理在汽车防撞系统中的运用
离 越远 , 则像 中 目标 的尺 寸越 小 , 近 则尺 寸越 大 。 越
建立模 型 , 图 2所 示 : 如
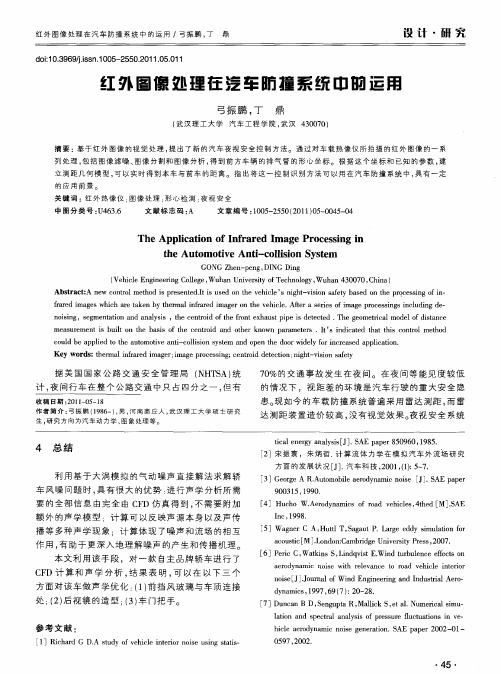
本 文通 过对 车 载单 目红 外热像 仪所 拍摄 的前 车
尾 部红 外 图像 的处理 ,从 中分离 出排气 管位 置在 红 外图像 中的形 心坐 标 ,并 以此 实时检 测本 车 与前车 的距 离 。 以将 这 一数据 实 时告知 驾驶 员 , 可 保证 行车
・
4 ・ 5
设 计 一藤 究
用作辅 助驾 驶 系统 ,在视 线差 的环 境 中用于 观测 行
汽车 科技第5 01 月 期21 年9
员提供 与前 车 的距离 。而 目前 一般 的图像 测距 模 型 是 基于 小孔成 像 的原 理 建立 起来 的 。 目标 与镜 头距
人 、 路 以及无 光源 障碍 物 , 道 为整车 提供 更高 的主 动 安 全性 。 夜视 系统输 出为较模 糊 的 图像 , 驶 员几 而 驾 乎 无 法根据 这 些 图像 判 断障碍 物 的距 离。利 用 热成 像 仪 进 行 前 车 距 离 测 量 是 视 觉 测 障 的 夜 间 解 决 方
本 文利 用该 手段 ,对 一 款 自主品 牌轿 车进 行 了
[ ]Pr Wa is ,id v t . n ruec f cso 6 ei C, t n Lnq i Widt b lneeet n c k S sE u f
a r d n mi o s t ee a c o r a e il it r r e o y a c n ie wi r l v n e t o d v h ce n e o h i
Th e Appl a i n o nf a e m a e Pr c s i n i to fI r r d I g o e sng i c t t m otv t- o lso se he Au o i e An i c l i n Sy t m i
高速公路汽车追尾防撞预警系统研究
车距识别由数字标尺方案实现,具体设计思想是:沿高速公路每隔100米设置一个具有无线收发功能的控制装置,称为数字标尺,该数字标尺根据其前方两个数字标尺传来的车辆位置登记信息判断当前车辆的行车安全等级,向车载台发出预警指示。此外,将数个数字标尺连接到一个数据汇总节点
汽车追尾碰撞是高速公路交通事故的主要形式,为了避免汽车追尾事故的发生,本文在通过对汽车追尾碰撞的主要特征、理论计算和责任认定研究的基础上,提出了高速公路汽车追尾事故的预防对策.
4.学位论文朱红高速公路汽车追尾预警系统的研究2005
本文提出了一种应用环境为双车道高速公路的基于数字标尺和图像处理技术的高速公路汽车追尾预警系统方案,并将其实现。
2.学位论文秦国斌高速公路汽车追尾预警系统的研究2007
近年来,随着我国高速公路事业的迅速发展,交通事故也与日俱增。高速公路是单向行驶道路,调查分析表明,高速公路恶性交通事故主要是汽车追尾。目前,汽车防撞预警装置主要是雷达防撞系统,但由于其自身的缺点和成本较高等原因,还没有得到普遍使用。本文提出了一种应用环境为双车道高速公路的基于数字标尺和图像处理技术的高速公路汽车追尾预警系统方案,并将其实现。
5.会议论文刘宝新.安泰.宋启杰.薛勋国高速公路汽车追尾事故的人因分析2007
高速公路汽车追尾是一种严重的交通安全事故,引起了交通科技界的广泛重视。本文着重对追尾事故的人因因素进行分析,探讨了人在高速公路追尾事故中的失误机理,并提出了相应的改进和预防措施。
6.期刊论文李智超.罗野.LI Zhichao.LUO Ye基于蚁群通信机制的高速公路汽车追尾预警系统的研究-机床与液
7.会议论文王军雷.李百川.应世杰高速公路汽车追尾碰撞预警系统的开发研究2004
基于图像处理的高速公路汽车防追尾系统研究
基于图像处理的高速公路汽车防追尾系统研究吴翠娟;章磊;费树岷【摘要】随着汽车的普及化,城市道路拥堵及高速公路车辆密集现象日益突出,汽车追尾事故日益增多.采用图像处理技术对汽车车载图像进行处理,进行前方车辆识别、车辆跟踪及图像测距,根据设定的安全车距给出预警提示和危险报警信号,形成了一种基于图像处理技术的高速公路汽车防追尾系统解决方案.系统对汽车追尾恶性交替事故的发生具有一定的抑制作用.%With the popularity of car, the phenomenon of urban road congestion and highway traffic density is becoming increasingly prominent, which caused an increasing number of rear-end accidents. A highway vehicle anti-rear-end solution was proposed which employing image processing technology to process the images obtained from the vehicle embedded device. Its highlights include recognizing front vehicle, vehicle tracing and image location distance measuring, signaling warning alarm tips and hazard. It can appropriately avoid the vicious turn of vehicles rear-end accident.【期刊名称】《电气自动化》【年(卷),期】2011(033)006【总页数】3页(P61-63)【关键词】图像处理;识别;跟踪;测距;防追尾【作者】吴翠娟;章磊;费树岷【作者单位】苏州经贸职业技术学院机电系,江苏苏州215009;东南大学自动化学院,江苏南京210096;东南大学自动化学院,江苏南京210096【正文语种】中文【中图分类】TP391.4;TP290 引言汽车追尾是高速公路恶性交通事故主要形式之一,往往造成巨大的财产损失和人身伤亡。
图像特征点匹配算法下车辆行驶主动防撞预警
图像特征点匹配算法下车辆行驶主动防撞预警目录1. 内容综述 (2)1.1 研究背景 (2)1.2 研究意义 (3)1.3 国内外研究现状 (4)1.4 本文结构安排 (5)2. 图像特征点匹配算法概述 (6)2.1 特征点检测算法 (7)2.2 特征点描述算法 (9)2.3 特征点匹配算法 (10)2.4 算法性能评价 (11)3. 车辆行驶主动防撞预警系统需求分析 (12)3.1 预警系统功能需求 (14)3.2 数据采集需求 (15)3.3 实时性与准确性要求 (16)4. 图像特征点匹配算法在车辆行驶主动防撞预警中的应用 (18)4.1 预警规则建立 (20)4.2 特征点匹配流程设计 (20)4.3 预警信号生成与处理 (22)4.4 系统运行环境与测试 (22)5. 车辆行驶主动防撞预警系统的设计与实现 (24)5.1 硬件设计 (25)5.2 软件设计 (27)5.3 数据处理流程 (28)5.4 系统集成与测试 (29)6. 实验验证与性能评估 (31)6.1 实验方法与数据采集 (32)6.2 性能评估指标 (33)6.3 实验结果分析 (34)6.4 结论与建议 (35)7. 结论与展望 (37)7.1 研究成果总结 (38)7.2 存在的问题 (39)7.3 未来研究方向 (41)1. 内容综述在图像特征点匹配算法下车辆行驶主动防撞预警文档的内容综述部分,我们首先概述该技术的主要概念和目的。
本研究集中在开发一种先进的车辆防撞系统,能够通过实时分析前方的路段,利用先进的技术手段,如图像特征点匹配算法,来预测潜在的碰撞风险并发出预警。
在内容综述中,我们也会提及这些技术对于车辆行驶安全性提升的重要性。
本算法是实现精确自动驾驶和高度自动化道路交通环境的关键手段之一。
它通过智能分析交通流量、侦测动态障碍物以及预测可能的冲突,有效地辅助驾驶员在应急情况下做出正确决策,从而显著减少交通事故的发生率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基 于图像处理技术的高速公路 汽车 防追尾系统解 决方案 。系统对汽车追尾恶性交替事故的发生具有一定的抑制作用 。
关键词 :图像处理 识别 跟踪 测距 防追尾 [ 中图分类号 ]T 3 14 T 2 [ P 9 . ;P 9 文献标志码 ]A [ 文章编号]10 3 8 ( 0 1 0 0 6 — 3 0 0— 86 2 1 ) 6— 0 1 0
( .Dp r etfMehncl n l tcl Szo stt o rd C m e e Szo ins 109, hn ; 1 eat n m o cai dEe ra, uhuI tuefTae& o m r , uhuJagU250 C ia aa ci ni c
2 h o eeo A t t n S u es U i rt , aj gJ ns 10 6 hn ) .T eclg uo i , o t at n e i N n n i gu2 0 9 ,C ia l f ma o h v sy i a
v h ce e i l a i g a d i g o ain d s n e me s rn ,sg ai g w r i g a am is a d h z r .I c n a p o r tl v i e il ,v h ce t cn n ma e lc t it c a u i g in l a n n lr t n a a d t a p rp i ey a od r o a n p a
Ab t a t : i e p p lr y o a ,t e p e o n n o r a o d c n e t n a d h g w y t f c d n i sb c mig i c e s g yp o n n , sr c W t t o u a i fc r h h n me o f b n r a o g s o n ih a af e st i e o n n r a i l r mi e t hh t u i ri y n w ih c u e n i ce s g n mb r o e re d a c d n s A h g wa e il n i e re d s l t n w s p o o e ih e lyn h c a s d a n r a i u e fr a— n c i e t. ih y v h c e a t— a — n o u i a r p s d whc mp o i g n r o
i g rc s i g tc n l g o p o e st ei g s b an d f m ev h ce e e d d d vc .I i h ih sic u e r c g ii gfo t ma e p o e s e h o o y t r c s ma e ti e o t e il mb d e e ie t h g l t n l d e o n zn n n h o r h s g r
0 引 言
汽车追 尾是高速公路恶性交通事故主要形式之一 , 往往 造成 巨大的财产 损失和人身伤亡 。本 系统 的关键技 术是前 方车辆 图 像 与主车之 间距 离的测量 , 即利用视觉 图像方法实时获取 车辆周 围相关 物体 位置及与主车 的相对距 离。通过安装 在车 辆前部 的 摄像机 跟踪 处理和持续测距 , 当车距在危险范围时 , 给出警示信号 , 提醒 驾驶 员注意保持 车距 , 有效预防追尾事件的发生。 图像测距 的一般 步骤有 目标识别 、 目标跟踪和 目标测距 三部 分 。 目标检测和 目标跟踪 是 限制 图像测距 方法 实时性 的主要 因 素 ; 目标测 距的算法对测量精度有直接影响。 而
Re e c e n Hih y Ve il t・ a - n y t m s d o ma e P o e sn s arh s o g wa hce Ani e re d S se Ba e n I g r c s ig - r -
W u C i a Z a g L i F iS u n u n u h n e2 e h mi 2
t e vco st r f e ilsr a . n c i e t h iiu n o h ce e re d a cd n . u v Ke wo d : g r c s ig t c n lg r c g i o ta e d s n e me s r g a t r a — n y r s i e p o e sn e h oo y e o nt n r c it c a u i n i e re d ma i a n —
模式识别
P  ̄ r d n i a in a e n le ti t s f c o
《 电气 自动化} 0 1 2 1 年第 3 卷 第 6期 3
基 于 图像 处 理 的高 速公 路汽 车 防追 尾 系统研 究
吴翠娟 章磊 费树 岷
( .苏州经贸职业技术学院 机 电系 , 1 江苏 苏州 25 0 ;.东南大学 自动化学院 , 109 2 江苏 南京 2 09 ) 10 6 摘 要 :随着汽车的普及化 , 城市道路拥堵及高速公 路车辆密集现象 日益 突出 , 汽车追尾 事故 日益增 多。采用 图像处理技术 对汽车 车 载图像进行处理 , 进行前方车辆识别、 车辆跟踪及图像测距 , 根据设 定的安全 车距 给 出预警 提示和危险报警 信号 , 形成 了一种