最新单片机汽车防追尾系统
汽车防追尾和防侧撞安全系统设计
汽车防追尾和防侧撞安全系统设计汽车防追尾和防侧撞安全系统设计汽车是现代社会人们出行的重要工具,但是在汽车行驶过程中,由于各种原因,如速度不当、距离不够、驾驶员疲劳等,易发生追尾、侧撞等事故,严重威胁驾乘人员生命安全。
为此,车辆防追尾和防侧撞安全系统的研发与推广具有重要意义。
本文就此展开探讨,设计一种汽车防追尾和防侧撞安全系统。
一、系统原理汽车防追尾和防侧撞安全系统由车辆上的多个传感器组成,包括雷达、摄像头和红外线等设备,这些设备通过计算机系统形成了一个控制单元。
当车辆前方出现障碍物,传感器就会向控制单元发出信号,控制单元会像驾驶员发出警告信号,警告驾驶员有障碍物。
如果驾驶员没有采取任何行动,控制单元会自动采取措施,如制动等,避免发生碰撞,从而保障驾驶员的安全。
二、系统特点1.预警及时该系统具有高灵敏度,能够及时发现障碍物,为驾驶员提供预警信息,尽早提醒驾驶员注意安全行车。
2.制动迅速当车辆前方出现障碍物时,控制单元会迅速采取措施如制动等,以避免发生碰撞。
3.适应性强该系统能够适应各种车型、环境和天气,具备很强的适应性。
4.运行稳定该系统使用先进的传感器和控制单元技术,具备非常稳定的运行性能,系统运行过程中不会出现任何问题,可靠性较高。
三、系统设计系统由三大部分组成:前端传感器、控制单元和驾驶员提示器。
前端传感器包括多个雷达、摄像头和红外线传感器等设备,放置在车辆的前部区域,用于检测前方障碍物信息。
当检测到障碍物信息时,前端传感器会向控制单元发送信号,控制单元会根据障碍物的距离、速度等信息,进行数据处理和预警。
控制单元是系统中的核心部分,接收前端传感器发出的信号,并根据预设的算法进行相应预警和判断,如果判断存在危险,系统会向驾驶员提示,同时启动制动系统,以避免发生碰撞。
驾驶员提示器一般为声音警告器和LCD显示屏,声音警告器会通过语音提示驾驶员,提示障碍物的位置、距离、速度等信息,LCD显示屏则可以显示具体的障碍物信息。
基于单片机的汽车防撞报警系统设计

泰山学院本科毕业设计基于单片机的汽车防撞报警系统设计所在学院机械与工程学院专业名称机械设计制造及其自动化申请学士学位所属学科工学年级二〇一一级 (3+2)学生姓名、学号王俊基 2011170233指导教师姓名、职称张秀红讲师完成日期 2013年 5月30日I摘要汽车业和电子业是工业界的两大巨头,伴随着汽车和电子工业不断地发展与进步,在现代化的汽车上,越来越广泛地应用了电子技术,汽车的电子化程度愈来愈高。
现在的交通运输业向着高密度的方向发展,电子方面的控制技术也进一步地应用在了汽车的行车安全性与导航方面。
随着社会的不断发展与进步,家庭汽车的数量越来越多,交通事故也与日俱增,交通安全愈来愈引起人们的重视,汽车防撞报警系统也应运而生。
本文以AT89S51单片机为核心,设计汽车的防撞报警系统,且借助于DSP技术,实现了低成本、高精度测距测速功能的FMCW(调频连续波)防撞雷达设计方案,同时还利用电磁铁同性磁极排斥的原理主动减速,达到防撞的效果。
该防撞报警系统以毫米波雷达为目标探测方式,提出了一款多功能汽车防撞报警系统。
该系统适应性强,有广阔的应用空间,当然还有待于进一步开发。
关键词:AT89S51单片机,DSP,电磁铁,毫米波雷达IABSTRACTAutomotive industry and the electronics industry is the industry’s tw o giants, along with the automotive and electronics industries continue to develop and progress in the modern car, more and more widely used in the electronics, automotive electronics higher and higher degree of 。
汽车智能追尾系统的研究

Dzie,kuje
以库以而
图3 显示模块硬件电路图
电源模块设计
●采用交流220V/50Hz电源转换为直流5V电源作为电源模 块。该方案实施简单,电路搭建方便,可作为单片机开发 常备电源使用。
●防追尾系统的运行必须要有一个电源提供必要的电压, 而这个电源就会受到一定的干扰,为此要设计一个稳压电 源,使电源受外部干扰的影响很小,可以采用磁饱和式的 交流稳压器,不仅可以减小电源电压波动范围大的干扰, 而且还可以抑制电源的外部噪声干扰。
图1 防追尾系统总体硬件电路图
测距模块设计
●当汽车装上激光测距装置以后,会向前方发射激光,等激光 碰到障碍物后会发射回来,利用激光在空气中传输的速度乘以 两次时间间隔的一半就可以计算出两车的距离,这种激光具有 连续性。
●其工作过程是:首先瞄准目标,然后接通激光电源,起动激 光器,通过发射光学系统,向瞄准的目标发射激光脉冲信号。 同时,采样器采集发射信号,作为计数器开门的脉冲信号,起 动计数器,钟频振荡器向计数器有效地输入钟频脉冲,由目标 反射回来的激光回波经过大气传输,进入接收光学系统,作用 在光电探测器上,转变为电脉冲信号,经过放大器放大,进入 计数器,作为计算器的关门信号,计数器停止计数。计数器从 开门到关门期间,所进入的钟频脉冲个数,经过运算得到目标 距离,在显示器上显示出来。
测速模块设计
●激光测速仪是采用激光测距的原理,激光测速是 对被测物体进行两次特定时间间隔的激光测距,取 得在该一时段内被测物体的移动距离,从而得到该 被测物体的移动速度。
主控制模块设计
●整个防追尾系统其实就是一个单片机系统,主要有主 控制模块,电源模块,数据采集模块,显示模块,声光 报警模块,驱动电路,通信接口模块,抗干扰模块等, 但单片机是整个系统最重要的模块,是一个嵌入式微控 制器。
基于stc89c52单片机的汽车倒车防撞警报系统

电子技术与软件工程Electronic Technology & Software Engineering电子技术Electronic Technology 基于STC89C52单片机的汽车倒车防撞警报系统文/吕淑芳(山西农业大学信息学院山西省晋中市030800 )摘 要:本文设计实现了一款汽车倒车防撞警报系统,采用STC89C52单片机作为汽车的主控制器,由HC-RS04超声波测距模块实时 测量车尾与周围障碍物之间的距离数值并传回显示,当测量数值大于预设警报间距数值时,蜂鸣器就会发出警报声,帮助驾驶员在倒车过 程中解决视角盲区的缺陷,避免驾驶过程中发生不必要的意外和伤害,从而提高驾驶的安全系数。
该系统电路设计合理,运行稳定,工作 性能好,响应速度快,通过计算实时显示测量数据,具有一定的测量精度可以满足需求。
关键词:倒车防撞警报;超声波测距;STC89C52单片机随着科学技术的迅猛发展,经济实力的不断增强,人民生活 质量的不断提高,无论是个人用车,还是交通运输车辆的出行安全 成为了人们最为关注的问题,尤其是倒车盲区造成的隐患,基于STC89C52单片机的汽车倒车防撞警报系统应运而生。
该系统的开 发旨在帮助驾驶员在倒车过程中解决视角盲区的缺陷,提醒驾驶员 泊车倒车过程中做出合理的操作,避免驾驶过程中发生不必要的意 外和伤害,让整个泊车或倒车的过程更加的安全高效,从而提高驾 驶的安全系数。
该系统利用灵敏的超声波传感检测设备及时准确的探测到汽车 倒车过程中车尾周围的障碍物或行人,并立即反馈给车内微型处理系统一52单片机,单片机再通过精确的算法运算比较之后迅速 做出判断,如果达到危险范围,系统将以语音灯光等信息及时提醒 驾驶者以及周边的行人,给驾驶员留出充足的处理该情况的操作时 间以达到减少交通事故发生概率的目的。
1系统介绍本文设计的汽车倒车防撞警报系统包括超声波模块、单片机模 块、驱动模块、显示模块,实现了报警功能、避障功能、测距功能、 显示功能。
汽车防追尾控制系统毕业设计(论文)
Introduction
Since the 1960 s, car technology has entered into electronic technology age. A wide variety of sensors, the electronic control unit, micro processor, memory and I/O interface, actuators, display and design software and widely used in car design manufacturing field, realize the extremely complex multivariate control function, thus greatly promote the performance of the car technology promotion. In car use security, at present, the most widely used car is ABS (ABS). It is on the car a active safety device, used in automobile braking prevent wheel lock drag slippery, and improve the car braking process of the direction stability, steering control ability and shorten the braking distance, give full play to the automobile braking performance.
汽车防追尾系统的研究设计
汽车防追尾系统的研究设计[摘要]本次汽车防追尾设计,主要是集中在汽车测速,车距测量,紧急情况报警与自动处理等方面,该系统以STC 12C2052单片机为控制核心,霍尔传感器作为测速模块、毫米波雷达作为测距模块,当汽车进入非安全距离时,系统会自动做出相应的减速处理并提示驾驶员要小心,而当车再次缩小进入紧急危险区时,系统则会自动报警并紧急刹车以免发生事故。
它集汽车测速,车距测量,紧急情况报警与自动处理等功能于一体,具有高度智能化、灵敏度高、反应速度快,控制距离远的的特点,特别适合当今社会的需要。
[关键词]单片机;测速;霍尔传感器测速;激光测距1、引言近年来,我国高速公路建设发展迅猛,为区域经济一体化的发展奠定了坚实的基础,同时,高速行车也引发了一系列严重的交通事故。
汽车追尾碰撞是高速公路交通事故的主要形式。
调查显示,追尾碰撞事故占高速公路总事故的比例高达36% ~40%,而且多为恶性事故,所造成的经济损失和人员伤亡最大。
所以预防高速公路交通事故应主要考虑汽车的追尾碰撞。
汽车追尾碰撞发生的主要原因是车速过快、行车间距过小、制动不及时等,而且在驾驶员疲劳和天气状况不佳的条件下尤其容易发生。
国外对追尾预警和避免系统的研究较早,其大量研究结果表明,经过合理设计的智能防撞系统能够有效降低追尾事故的发生率,提高高速公路行车的安全性。
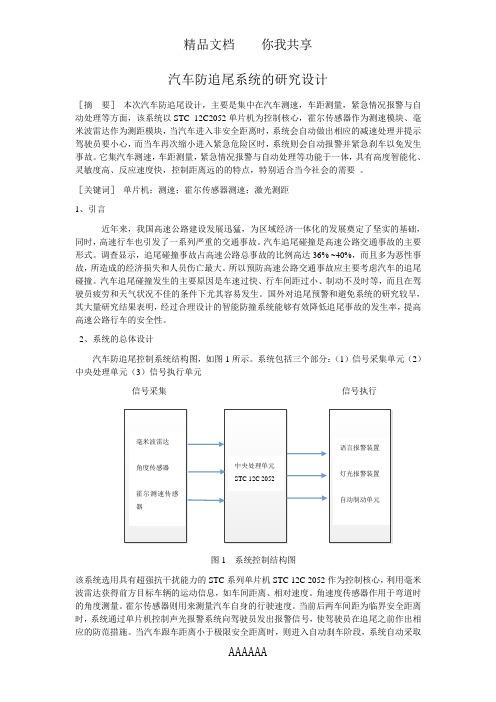
2、系统的总体设计汽车防追尾控制系统结构图,如图1所示。
系统包括三个部分:(1)信号采集单元(2)中央处理单元(3)信号执行单元信号采集信号执行图1 系统控制结构图该系统选用具有超强抗干扰能力的STC系列单片机STC 12C 2052作为控制核心,利用毫米波雷达获得前方目标车辆的运动信息,如车间距离、相对速度。
角速度传感器作用于弯道时的角度测量。
霍尔传感器则用来测量汽车自身的行驶速度。
当前后两车间距为临界安全距离时,系统通过单片机控制声光报警系统向驾驶员发出报警信号,使驾驶员在追尾之前作出相应的防范措施。
基于单片机的超声波倒车防撞系统设计
基于单片机的超声波倒车防撞系统设计摘要:本文设计是基于 51 单片机,设计的一个简易的超声波倒车报警防碰撞安全系统。
在车尾分别安装超声波和热释电模块,测量障碍物距离是使用 HC-SR04超声波模块,使用 HC-SR501 热释电模块来检测是否有人体靠近。
该防碰撞系统通过对模块返回的数据分析然后通过无源蜂鸣器进行报警提示,并在 LCD1602液晶屏上显示报警等数据,提示车主障碍物的出现以及时地做出反应。
关键字:HC-SR04 超声波模块;LCD1602液晶显示屏;51单片机最小系统板1.项目背景:近年来随着车辆的增加,不论是汽车还是其它类型车辆,驾驶员都会面临倒车这一挑战,在倒车过程中驾驶员并不能很好的掌握后方车尾情况,车尾部分位置处于驾驶员的视野盲区,而且许多驾驶人员在倒车这一方面并不熟练,因此造成了许多事故的发生,全球每年由于倒车事故造成的人员和财产损失的数目是惊人的,因此,车辆倒车问题已引起人们的高度重视。
对大量交通事故的分析表明,80%以上的车祸是由于驾驶员反应不及时引起的,超过65%的车辆相撞属于追尾相撞,其余则属于侧面相撞和正面相撞。
有关研究表明,若驾驶员能够提早1s 意识到有事故危险并采取相应的措施,则 90%的追尾事故可以避免。
2.项目目的:为了减少驾驶员倒车交通事故,车载系统的功能需得到改善。
在驾驶员信息系统的关键技术挑战是降低生产成本,同时提供智能安全的系统。
例如,目前国内大多数普通汽车和一些小型车辆并没有类似的倒车报警防撞系统,国外绝大多数车辆也并没有此种防撞系统,一方面是部分车辆公司并没意识到倒车的安全隐患,另一方面便是报警防撞系统过于昂贵,而我们所设计的倒车防撞系统,不仅价格低廉,而且具有极高的安全性能。
防撞系统开发技术的主要挑战是降低成本的同时,也提高了感应功能,以提高准确性和可靠性。
车辆将共享许多防撞系统的传感元件,可以不断地评估不断变化的环境和驾驶环境。
这样就会大大提高汽车倒车的安全性,减少车祸的发生。
基于单片机的红外汽车倒车防撞系统设计

基于单片机的红外汽车倒车防撞系统设计摘要:当前,由于司机不能看清后方或安全距离不够就进行倒车所引发的各种交通事故屡见不鲜。
为了减少此类事故的发生,该设计采用单片机、超声波模块以及红外壁障模块实施探测车身尾部是否有障碍物(人、动物、或其他物件等),并用语音报警系统和LCD显示提醒驾驶员注意倒车方向、车速及车距等,并详细地介绍了系统的设计,实验结果表明,该方案完全符合设计要求。
关键词:单片机超声波红外壁障语音报警LCD显示随着人民生活水平的高速发展和提高。
汽车作为一种交通工具,已快速融入人们的生活。
然而在给人们带来福音的同时,也带来各种麻烦。
当前,由于司机不能看清后方就进行倒车所引发的各种交通悲剧、纠纷已屡见不鲜。
每年全世界约有20万人死于倒车过程,40万人受伤于倒车过程,中国所占的比例约为总量的1/5左右[1]。
但城市里行驶的汽车又是城市交通工具的重要一大组成部分,是城市基础建设的主要设施之一,我们只能尽力去避免这些事故的发生。
在这些事故中,一般由于障碍物太低(如小孩在车的后面)和由于不能准确的计算障碍物的实际距离,从而导致凭反光镜看后方的司机仅不能具体看清障碍物及其距离,直接发生撞击事故[2]。
针对当今此类事故的频发,本文研究设计了一种基于单片机控制的汽车倒车防撞系统,该系统以功能强大的STC89C52单片机作为控制器,各功能模块对障碍物进行探测并收集处理数据,通过LCD显示和语音报警系统警示驾驶员小心倒车,尽量避免此类事故发生。
1 汽车倒车防撞系统的工作原理与结构设计框图该汽车倒车防撞系统中:一是要利用超声波测距模块实现自动测距,并送入单片机;二是要利用红外避障传感器,实现对后方的左右两侧障碍物进行自动测距。
单片机对二路信号进行综合分析后作出反应,一方面通过LCD模块适时显示障碍物距离车体的距离,另一方面根据障碍物离车体距离的远近发出不同的语音报警信号,以提醒驾驶员谨慎行驶,注意避让行人或障碍物;当传感器检测到车体距离人或障碍物到达最小安全距离时,单片机迅速做出反应关闭电机驱动模块,紧急刹车,以防止意外事故发生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机汽车防追尾系统 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢29 基于单片机的汽车防追尾碰撞报警系统设计 目 录 摘要.................................................................................................II
一 引 言 ................................................................. 1
(一) 社会背景及意义 ........................................... 1 (二) 国内外研究现状 ........................................... 1 (三) 设计思路 ................................................... 1 (四)论文组织结构 ............................................... 3 二 系统关键技术分析 .................................................. 3 (一) 模数转换技术 .............................................. 3 1. 模数转换模块(ADC) .................................. 3 2. ADC工作原理............................................. 4 3. ADC采样时间和转换时间 ............................. 5 (二). 寻迹导航技术 ................................................ 8 (三).红外检测技术 ............................................ 9 (四). 脉宽调制技术 ......................................... 10 三 系统架构设计 ...................................................... 11 (一) 系统功能结构设计 ...................................... 11 (二) 各模块功能分析 ......................................... 12 四 系统硬件电路设计 ................................................ 14 (一)稳压电源电路设计 ....................................... 14 (二) 模拟光电传感器电路设计 .............................. 15 (三) 红外避障传感器控制电路设计 ......................... 17 精品好文档,推荐学习交流 仅供学习与交流,如有侵权请联系网站删除 谢谢29 (五) 电机驱动电路设计 ...................................... 19 五 系统测试 ........................................................... 21 (一) 系统测试工具 ............................................ 21 (二) 测试结果与分析 ......................................... 23 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢29 摘要 随着人们生活水平的日益提高,汽车数量也与日俱增,因此汽车的行驶安全就显得尤为重要。介绍一种基于单片机Fusion FPGA AFS600芯片的汽车防追尾碰撞报警系统,他是自动检测行进中汽车前后方障碍物的距离,当达到安全极限距离时,会发出声光报警,提示驾驶员进行相应的操作。给出该报警系统的软硬件设计,实践证明该系统有效且准确。 为提高汽车运行的安全性和降低碰撞发生的可能,本文讲述一种主动型汽车防追尾碰撞报警系统。该系统装置将单片机的实时控制及数据处理功能,与毫米波雷达的测距技术、传感器技术相结合,可检测汽车运行中前方、后方障碍物与汽车的距离及汽车车速,通过数显装置显示距离,并由发声电路根据距离远近情况发出警告声。
关键词:单片机;碰撞;报警;检测 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢29 Abstract With rising of living stangard,the number of cars increased every day,so cars driving safety is particularly important. The system of automobile anti-collision alarming system based on single Fusion FPGA AFS600-chip is introduced,it can auto detect distance frontage an rear fraise,when reach critical security distance,alarming of sound an light are given,the system hardware composition anf software project are showed,Experiment results prove validity and veracity. In order to enhance the safety of cars and reduce the possibility of a collision, the paper about a pro-active anti-vehicle collision warning system. The system will be installed real-time control of the microcontroller and data processing functions, and millimeter-wave radar ranging technology, sensor technology, could be detected in the vehicle running in front, the rear vehicle barriers and the distance and vehicle speed, through the significant number of Device shows that distance by distance voice circuits based on the situation issued a warning sound.
Keywords:single chip computer; collision;
alarming;detection 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢29 精品好文档,推荐学习交流
仅供学习与交流,如有侵权请联系网站删除 谢谢29 一 引 言
(一) 社会背景及意义 为有效降低小汽车碰撞事故的高发率,近年来广大电子爱好者始终都在试图通过制作模型的方式,努力探寻解决该问题的可行方案,而模型制作所需的硬件基础尤其成为解决问题的关键。第二届“Actel”杯中国大学生电子竞赛的举办,为这一问题的解决提供了契机,主办方提供的Fusion StartKit FPGA开发板上AFS600芯片独特的资源设计和强大的执行能力,为高速公路汽车防追尾系统模型的研究与实现奠定了坚实的硬件基础。这一系统研究的成功将为汽车安全驾驶提供一个具有价值的参考,在一定程度上可减少或消除追尾事故的发生,防止行车过程中对行人造成安全隐患,从而达到安全行驶的目的。
(二) 国内外研究现状 通过资料的收集和网上相关的查阅,得知汽车防追尾的话题在国内外一直很受关注。国内近年来也出现了轮胎气压检测、汽车防追尾仪和防追尾指示灯等汽车防追尾装置的研发与投产,但这类装置有些只为解决由于汽车硬件故障造成防追尾事故而设计,有些装置虽然以发出警示信息等方式,为驾驶者在突发状况下采取应急措施提供条件,但都在很大程度上忽略了人为因素对追尾事故的影响,此外这类装置较高的成本也阻碍其投产与推广。 基于Fusion StartKit FPGA的高速公路汽车防追尾系统模型的研究将对以后这类产品的研究提供一个更好的构想。本课题将以人为本作为核心出发点,弥补驾驶者因主观失误造成事故而设计。通过进一步改进可附加在成品汽车上,在整车设计中可把其作为一个标准的汽车电子配件。随着时间和技术的推移,市场中将会出现更多汽车安全类的产品,但由于市场接受需要一个过程,截止目前,还没有一个类似的安全产品在成品汽车上应用。
(三) 设计思路 本系统模型采用两辆智能小车进行汽车防追尾的设计与实现[3]。智能小车有两个电机,后轮为驱动电机,前轮为转向电机,可通过PWM