自由度计算例题
自由度计算例题63435
C
E
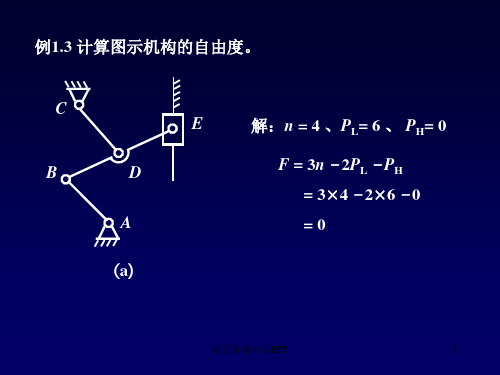
解:n = 4 、PL= 6 、 PH= 0
B
D
F = 3n–2PL–PH = 3×4–2×6–0
A
=0
(a)
语言资格考试PPT
1
A
D
E
解:n = 5 、PL= 7 、 PH= 0
G
F = 3n–2PL–PH
B
C
F
(b)
= 3×5–2×7–0
=1
语言资格考试PPT
(若存在复合铰链、局部自由度或虚约束请指明)
复合铰链:J 局部自由度:D 虚约束:M(N )
F =3n -2PL-PH = 3×9 -2×12 - 2 =1
语言资格考试PPT
8
2020
5
B A
(3)
局部自由度:B、C
D
虚约束:E(F )
C
F = 3n–2PL–PH
= 3×3–2×3–2
E
=1
F
语言资格考试PPT
6
J
I H
F
E
B
A
(4)
复合铰链:D
K
局部自由度:H
虚约束:F(G )
G D
F = 3n–2PL–PH = 3×8–2×11–1 =1
C
语言资格考试PPT
7
提高题:求机构自由度。
E
=1
A
F
语言资格考试PPT
4
例1.6 计算Байду номын сангаас列机构的自由度(若存在复合铰链、局部自由度或 虚约束请指明)
局部自由度:C
虚约束:D(E )
F = 3n - 2PL - PH = 3×3 - 2×3 - 2 = 1
自由度计算习题及答案
自由度计算习题及答案自由度计算习题及答案自由度是统计学中一个重要的概念,用于描述样本数据中可以自由变动的部分。
在统计学中,我们常常需要计算自由度来进行假设检验、方差分析等统计推断。
本文将给出一些自由度计算的习题及答案,帮助读者更好地理解和应用这一概念。
习题一:假设有一组样本数据,包含10个观测值。
我们希望进行一个t检验,假设总体均值为0。
请计算该t检验的自由度。
解答一:t检验的自由度由样本容量和样本数据的分布决定。
对于独立样本t检验,自由度等于两组样本的自由度之和再减去2。
在这个例子中,我们只有一组样本数据,因此自由度为10-1=9。
习题二:某公司想要比较两种不同的广告策略对销售额的影响。
他们随机选择了两组顾客,每组分别观看了不同的广告。
请计算用于比较两组销售额的独立样本t检验的自由度。
解答二:在独立样本t检验中,自由度等于两组样本的自由度之和再减去2。
假设第一组观测了n1个顾客,第二组观测了n2个顾客,那么自由度为n1+n2-2。
习题三:某研究人员想要比较三种不同的治疗方法对患者疼痛程度的影响。
他们随机将患者分为三组,每组接受不同的治疗。
请计算用于比较三组疼痛程度的方差分析的自由度。
解答三:方差分析的自由度由分子自由度和分母自由度组成。
对于一元方差分析,分子自由度为组数减1,即3-1=2。
分母自由度为总样本容量减去组数,即n-3。
在这个例子中,假设每组的样本容量为n,则分母自由度为3n-3。
习题四:某研究人员想要比较两种不同的教学方法对学生成绩的影响。
他们随机将学生分为两组,一组接受传统教学,另一组接受创新教学。
请计算用于比较两组学生成绩的配对样本t检验的自由度。
解答四:配对样本t检验的自由度等于配对观测值的数量减去1。
在这个例子中,假设有n对配对观测值,则自由度为n-1。
通过以上习题及答案的解析,我们可以看到自由度的计算对于统计推断是至关重要的。
正确计算自由度可以确保我们所做的统计分析具有可靠性和准确性。
平面机构自由度计算例题及答案
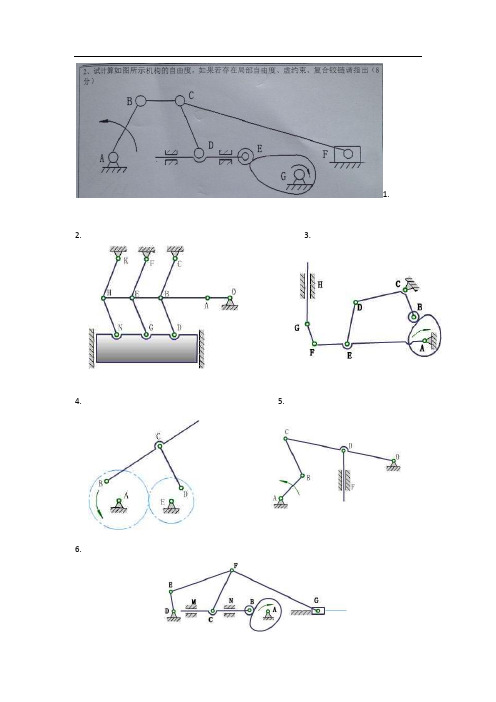
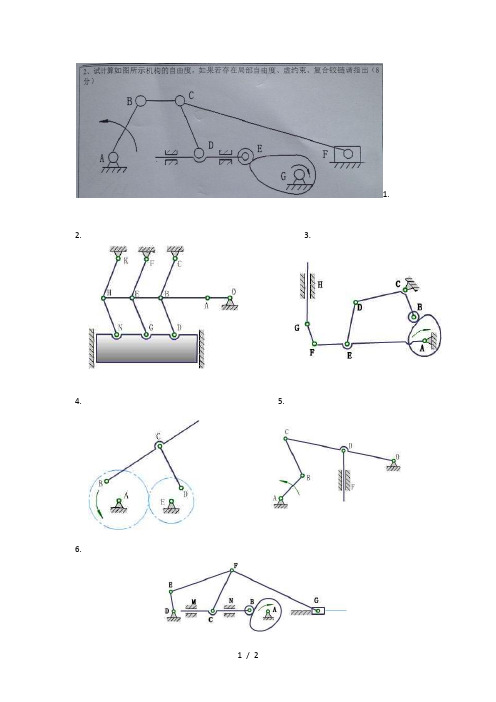
1.2. 3.4. 5.6.1.构件数n为7,低副p为9,高副pn为1,局部自由度为1,虚约束为0.E处为局部自由度,C处为复合铰链.F=3n-2p-pn=3*7-2*9-1=2(与原动件数目一致,运动确定)2. B处有复合铰链,有2个转动副。
无局部自由度。
B点左侧所有构件和运动副带入的约束为虚约束,属于与运动无关的对称部分。
n=5, PL=7, PH=0, F= 3n-2PL -PH=3×5-2×7-1×0=1。
运动链有确定运动,因为原动件数= 自由度数。
3.A处为复合铰链,因为有3个构件在此处组成成转动副,所以应算2个转动副。
B处为局部自由度,假设将滚子同构件CB固结。
无虚约束。
n=6, PL=8, PH=1, F= 3n-2PL -PH=3×6-2×8-1=1。
运动链有确定运动,因为原动件数= 自由度数。
4. 没有复合铰链、局部自由度、虚约束。
n=4, PL=5, PH=1, F= 3n-2PL -PH=3×4-2×5-1=1。
运动链有确定运动,因为原动件数= 自由度数。
5. 计算自由度:n=4, P L=6, P H=0, F= 3n-2P L -P H=3×4-2×6-1×0=0,运动链不能动。
修改参考方案如图所示。
6. F处为复合铰链,因为有3个构件在此处组成成转动副,所以应算2个转动副。
B处为局部自由度,假设将滚子同构件CB固结。
移动副M、N中有一个为虚约束,属于两构件在多处组成运动副。
n=7, PL=9, PH=1, F= 3n-2PL -PH=3×7-2×9-1=2。
运动链没有确定运动,因为原动件数< 自由度数。
自由度计算题

1.试计算下列平衡体系的自由度数:(1) 298.15 K、101 325Pa下固体NaCl与其水溶液平衡;(2) I2(s) ? I2(g);(3) NaCl(s)与含有HCl的NaCl饱和溶液。
(答案:①0,②1,③3)解:(1) C = 2, P= 2 又T, p已指定∴F= C -P + n = 2- 2 + 0 = 0(2) C=1, P=2则F= C - P + n = 1- 2 + 2 = 1(3) C=3, P =2∴F= C -P + n =3- 2 + 2 = 32.固体NH4HS和任意量的H2S及NH3气体混合物组成的体系按下列反应达到平衡:NH4HS(s) ≒NH3(g)+H2S(g)(1) 求该体系组元数和自由度数;(2) 若将NH4HS放在一抽空容器内分解,平衡时,其组元数和自由度数又为多少?(答案:①2,2,②1,1)解:(1) C =3- 1=2, 即体系组元数为2P=2体系的自由度数F= C -P + n = 2 – 2 + 2 = 2体系平衡时的组元数C = 3 – 1 –1 = 1P=2体系的自由度数 F= C -P + n = 1- 2 + 2 = 13.已知Na2CO3(s)和H2O(l)可形成的水合物有三种:Na2CO3·H2O(s),Na2CO3·7H2O(s)和Na2CO3·10H2O(s)试问:(1) 在101 325 Pa下,与Na2CO3水溶液及冰平衡共存的含水盐最多可有几种?(2) 在293.15 K时,与水蒸气平衡共存的含水盐最多可有几种?(答案:①1,②2)解:(1) 设最多有x种含水盐,则K = 2 + x,R = x∴C = K-R = 2 + x- x = 2又P= 2 + x,n = 1∴由相律F = C -P + n得:F= 2- (2+x) +1 = 1- x而F≥0 ∴x≤1,即最多只能有一种含水盐与之共存。
平面机构自由度计算例题及答案

平面机构自由度计算例题及答案在机械设计和分析中,自由度是一个重要的概念,它用来描述机构的运动能力和约束程度。
特别是对于平面机构而言,自由度计算是机构设计和分析的基础。
本文将以一个例题为例,详细介绍平面机构自由度计算的方法,并给出答案。
例题描述:给定一个平面机构,该机构由三个连杆和两个旋转副组成,其中两个连杆用来传递运动,第三个连杆则作为链接杆。
假设该机构中的两个旋转副都分别由一对垂直的直线轴构成。
求该平面机构的自由度。
解题思路:为了计算平面机构的自由度,首先需要明确平面机构的自由度计算公式。
根据机构自由度的定义,平面机构的自由度等于其约束数目减去自由度减去已知条件数目。
对于本例中的平面机构,约束数目为2,已知条件数目为1,因此我们只需要计算平面机构的自由度即可。
解题步骤:1. 确定机构中的运动副:根据题目描述,该机构中的运动副是两个旋转副。
2. 统计机构中的连杆数目:根据题目描述,该机构中共有三个连杆。
3. 计算机构中的运动副数目:根据运动副的定义,旋转副的数目等于直线轴的数目减一。
因此,该机构中的旋转副数目为2。
4. 计算平面机构的自由度:根据平面机构的自由度计算公式,自由度等于连杆数目减去运动副数目。
因此,该机构的自由度为3-2=1。
5. 减去已知条件数目:根据已知条件的定义,已知条件是指在机构中已经确定的尺寸或位置关系。
根据题目描述,已知条件数目为1。
6. 最终计算结果:根据平面机构自由度的定义,平面机构的自由度等于约束数目减去自由度减去已知条件数目。
因此,该平面机构的自由度为2-1=1。
答案解析:根据计算结果,该平面机构的自由度为1。
这意味着该机构具有一个独立自由度,即只能在一个平面内进行单一的自由运动。
根据机构设计和分析的需要,可以对该机构进行进一步优化和改进,以满足特定的运动要求。
总结:通过上述例题的计算,我们了解了平面机构自由度的计算方法。
平面机构自由度的计算是机构设计和分析的基础,对于确定机构的运动能力和约束程度非常重要。
机构自由度计算题

F=3n-2pl-pH=3x 7-2x10-0=1
该运动链有一个主动件,因此能成为机构。
4、计算图示运动链的自由度,并判断其能否成为机构。
解:D’虚约束
F=3n-2pl-pH=3×5-2×7-0=1
6、计算图示机构的自由度,并说明主件的数目是否合适。机构自由度计算题
1、计算图示机构的自由度。
解:复合铰链
F=3n-2pl-pH=3x 5-2x 7-0=1。
2、计算图示运动链的自由度,并判断其能否成为机构。
解:复合铰链
F=3n-2pl-pH=3x 5-2x 7-0=1。
该运动链有两个主动件,因此不能成为机构。
3、计算图示运动链的自由度,并判断其能否成为机构。
解:F=3n-2pl-pH=3x 4-2x 5-1=1。
图示已是一个机构,自由度等于主动件数,合适。
平面机构自由度计算例题及标准答案
1.2. 3.4. 5.6.1.构件数n为7,低副p为9,高副pn为1,局部自由度为1,虚约束为0.E处为局部自由度,C处为复合铰链.F=3n-2p-pn=3*7-2*9-1=2(与原动件数目一致,运动确定)2. B处有复合铰链,有2个转动副。
无局部自由度。
B点左侧所有构件和运动副带入的约束为虚约束,属于与运动无关的对称部分。
n=5, PL=7, PH=0, F= 3n-2PL -PH=3×5-2×7-1×0=1。
运动链有确定运动,因为原动件数= 自由度数。
3.A处为复合铰链,因为有3个构件在此处组成成转动副,所以应算2个转动副。
B处为局部自由度,假设将滚子同构件CB固结。
无虚约束。
n=6, PL=8, PH=1, F= 3n-2PL -PH=3×6-2×8-1=1。
运动链有确定运动,因为原动件数= 自由度数。
4. 没有复合铰链、局部自由度、虚约束。
n=4, PL=5, PH=1, F= 3n-2PL -PH=3×4-2×5-1=1。
运动链有确定运动,因为原动件数= 自由度数。
5. 计算自由度:n=4, P L=6, P H=0, F= 3n-2P L -P H=3×4-2×6-1×0=0,运动链不能动。
修改参考方案如图所示。
6. F处为复合铰链,因为有3个构件在此处组成成转动副,所以应算2个转动副。
B处为局部自由度,假设将滚子同构件CB固结。
移动副M、N中有一个为虚约束,属于两构件在多处组成运动副。
n=7, PL=9, PH=1, F= 3n-2PL -PH=3×7-2×9-1=2。
运动链没有确定运动,因为原动件数< 自由度数。
机械原理计算自由度习题及答案
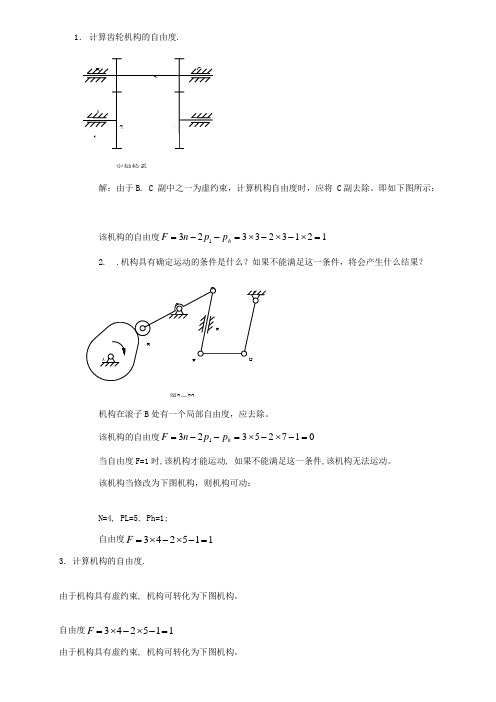
1. 计算齿轮机构的自由度.
解:由于B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。
即如下图所示:
该机构的自由度1213233231=⨯-⨯-⨯=--=h p p n F
2. .机构具有确定运动的条件是什么?如果不能满足这一条件,将会产生什么结果?
机构在滚子B 处有一个局部自由度,应去除。
该机构的自由度017253231=-⨯-⨯=--=h p p n F
当自由度F=1时,该机构才能运动, 如果不能满足这一条件,该机构无法运动。
该机构当修改为下图机构,则机构可动:
N=4, PL=5, Ph=1;
自由度342511F =⨯-⨯-=
3. 计算机构的自由度.
由于机构具有虚约束, 机构可转化为下图机构。
自由度342511F =⨯-⨯-=
由于机构具有虚约束, 机构可转化为下图机构。
定轴轮系 A
B C
1 2
3
4 图2-22
F=⨯-⨯=
自由度31211
由于机构具有虚约束, 机构可转化为下图机构。
F=⨯-⨯=
自由度33241。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
2
5 F
6
7 G
A C
H
I
复合铰链
虚约束
8 K 9
n 8 ; PL 11; PH 1
F 3n 2PL PH
38 2111 1
语言资格考试PPT
8
例 3 计算图所示机构的自由度 (若存在局部自由度、 复合铰链、虚约束请标出)。
B 1
A
4 C
2
3
E
D
5F
H
6
G 7
I
语言资格考试PPT
机构自由度计算举例
例 1 图示牛头刨床 设计方案草图。设计 思路为:动力由曲柄1 输入,通过滑块2使摆 动导杆 3 作往复摆动, 并带动滑枕4作往复移 动 ,已达到刨削加工 目的。 试问图示的构 件组合是否能达到此 目的? 如果不能,该 如何修改?
4
1
2
3
语言资格考试PPT
1
解:首先计算设计方案草图的自由度
n 7 ; PL 9 ; PH 1 F 3n 2PL PH 37 29 1 2
语言资格考试PPT
13
2020
9
局部自由度
B 1
A
4 C
2
3
E
D 5F
虚约束
H 6 G
7
I
n 6 ; PL 8 ; PH 1 F 3n 2PL PH 362811
语言资格考试PPT
10
例 4 如图所示, 已知HG=IJ,且相互平行;GL=JK,且相 互平行。计算此机构的自由度 (若存在局部自由度、复
合铰链、虚约束请标出)。
F 3n 2PL PH 3 4 2 6 0
即表示如果按此方案设计机构,机构是不能运动的。必 须修改,以达到设计目的。
改进措施: 1、增加一个低副和一个活动构件; 2、用一个高副代替低副。
语言资格考试PPT
2
改进方案
语言资格考试PPT
3
改进方案
语言资格考试PPT
4
改进方案
语言资格考试PPT
I
H
8
7
G
J
10
6
B
9
C
1
K 11 L
2
A
D E3
4
F
5
语言资格考试PPT
11
虚约束
复合铰链
局部自由度
I
H
8
7JGຫໍສະໝຸດ 6B109
C
1
11
K
L
2
A
E 3D
4
F
5
n 8 ; PL 11; PH 1 F 3n 2PL PH 38 2111 1
语言资格考试PPT
12
例 5 计算下图机构的自由度 (若存在局部自由度、复 合铰链、虚约束请标出)。
5
改进方案
语言资格考试PPT
6
例 2 如图所示,已知: DE=FG=HI,且相互平行;DF=EG, 且相互平行;DH=EI,且相互平行。计算此机构的自由度 (若存在局部自由度、复合铰链、虚约束请标出)。
D4 E
B3
1
2
5 F
6
7 G
A C
H
I
8 K 9
语言资格考试PPT
7
局部自由度
D4 E
B3