(智能制造)论文正文管道履带式机器人
多功能履带式机器人设计

摘要:随着我国改革开放的不断开展,我国经济建设和技术应用都得到了高速稳定的发展,机器人已成为制造加工行业必不可少的关键设备,机器人可以分为关节机器人和移动机器人两种,关节机器人通常情况下是固定不动的,所以其工作范围非常局限,而移动机器人恰恰克服了这一技术难题,随时随地的移动大大的增加了机器人的使用区间,使得机器人能够更加方便快捷的完成各项任务。
移动机器人相比普通关节机器人增加了移动机构,移动的方式多种多样,有腿式移动机构,轮式移动机构,履带式移动机构等等,选择何种移动方式决定了移动机器人的工作性质和内容。
本篇论文中提出了一种结构巧妙、机动性好、稳定性能高的多功能履带式机器人设计方案,本方案对履带式机器人技术进行深入分析研究,其工作原理是:利用履带式机器人的双节双履带进行支撑机器人本体进行移动,通过调整两节履带的角度来翻越障碍,最终实现机器人自由移动的目的。
多功能履带式机器人作为一种新型的移动机器人,对此进一步的研究也是不能忽视的。
关键词:机器人;移动机器人;履带式机器人AbstractWith the continuous development of China's reform and opening up, China's economic construction and technology applications have been high-speed and stable development, the robot has become a manufacturing and processing industry essential essential equipment, robots can be divided into joint robot and mobile robot two, joint robot Usually the case is fixed, so its working range is very limited, and mobile robots just to overcome this technical problems, anytime, anywhere the mobile greatly increased the use of the robot range, making the robot can more quickly and easily complete the task.Compared with the common robot, the mobile robot has increased the movement mechanism, the movement way is varied, the leg movement mechanism, the wheel movement mechanism, the crawler movement mechanism and so on. What kind of movement mode is selected determines the working nature of the mobile robot and content. This paper presents a multi-functional crawler robot design scheme with clever structure, good mobility and high stability. The scheme is based on the deep analysis of the crawler robot technology. The working principle is that the use of the double- Section of the double track to support the robot body to move, by adjusting the angle of the two tracks to cross the obstacles, and ultimately achieve the purpose of free movement of the robot. Multi-function crawler robot as a new type of mobile robot, this further study can not be ignored.Keywords: robot,Mobile robots, Crawler robots目录Abstract (II)目录 (III)第一章绪论 (1)1.1 引言 (1)1.2移动机器人的发展概况 (1)1.3 Solidwork软件的介绍 (2)1.4 有限元分析的介绍 (3)1.5 课题研究的意义及目的 (4)第二章多功能履带式机器人的设计 (5)2.1 多功能履带式机器人的设计要求 (5)2.2多功能履带式机器人的设计概述 (5)2.2.1多功能履带式机器人与其他类型移动机器人原理的对比 (5)2.2.2多功能履带式机器人与其他类型移动机器人特点的对比 (8)2.2.3 多功能履带式机器人的设计参数 (8)2.3多功能履带式机器人的具体设计 (8)2.3.1 机器人底座结构设计 (9)2.3.1.1行走电动机的设计与选型 (9)2.3.1.2减速器齿轮的设计 (12)2.3.1.3齿轮齿数的选择 (13)2.3.1.4直齿圆柱齿轮静力及接触分析的理论计算 (14)2.3.1.5直齿轮静力及接触的有限元分析 (17)2.3.1.6链传动的设计 (19)2.3.2机械手臂结构设计 (21)2.3.2.1机械手臂转动电机的设计与选型 (21)2.3.2.2机械手臂转动结构的设计 (23)第三章总结与展望 (24)参考文献 (24)第一章绪论1.1 引言随着我国改革开放的不断开展,我国经济建设和技术应用都得到了高速稳定的发展,机器人应用的地方变得越来越多,从单一的生产制造业发展到各行各业,甚至延伸到排爆等危险的具体工作。
履带式行走机器人论文
1 绪论1.1机器人发展概况在工业机器入问世30多年后的今天;机器人己被人们看作是一种生产工具。
在制造、装配及服务行业,机器入的应用取得了明显的进步。
由干传感器、控制、驱动及材料等领域的技术进步,通过智能机器人系统首次在制造领域以外的服务行业,开辟了机器人应用的新领域,让机器人作为“人的助手”,使人们的生活质量得以提高。
目前在许多领域己经进行了很大的努力来开发服务机器入系统,并力争在较大范围内使用它们。
这些机器人系统尽管有不同的应用领域,但它们所从事的工作仅限于维护保养、修理、运输、清洗、保安、救援及数据采集等方面。
机器人是一个通用的自动化装置。
国际标准化组织(1SO)的定义:“机器人是一种自动的、位置可控的、具有编程能力的多功能操作机,这种操作机具有几个轴,能够借助可编程操作来处理各种材料、零件、工具和专用装置,以执行各种任务”。
从1954年美国工程师乔治.大卫发表了《适用重复作业的通用性工业机器人》论文开始,到1962年美国联合控制公司推出第一台机器人“尤尼麦特”为止。
机器人开始在工业生产的各种场合中,起到了置关重要的作用。
而在所有的机器人研究中,尤使日本的机器人研究最为突出。
现在国外大多都在致力于直立行走机器人和微型机器人的研究。
特别是注重对于机器人控制和视觉识别方面的研究。
对于行走机器人而言,最引起大多数科学家注意的是对于视觉识别方面的研究。
并且也取得了许多可人的成果。
行走机器人分很多种,不仅有直立式,还有履带式,多支点式等等。
而这里只谈谈履带式行走机器人。
履带式行走机器人是一种利用履带进行支撑机器人机体的移动机器人目前我国发展了多履带式机器人,有四条和六条履带的移动机器人。
他们的优点是转向方便移动稳定的特点,所以适合在恶劣的条件下进行工作。
1.2 履带式行走机器人概述所谓履带式行走机器人(我们这里指的是普通的履带式行走机器人)利用两条履带进行支撑机体进行移动的机器人。
它具有运行稳定,转向灵活,能够越过较小的障碍,并且承载重量较大的特点。
管道履带式机器人毕业论文
管道履带式机器人毕业论文1绪论管道机器人在人类社会中已经迅速的漫延开来,这一切都应归公于它自身的特点。
因此,国外都在不断的开发和研制更适合管行走的管道机器人,并开始走向微型化、智能化,使之性能更宜人化,可控性更好,准确性更高[]3。
但是管道机器人由于受到它工作环境的限制和沉重的任务负担,致使它也不断面临着更多,更严重的困难和问题。
如何解决?已经成为现代人的责任和发展方向。
1.1管道机器人发展概况1.1.1国外管道机器人研究进展国外关于燃气管道机器人的研究始于20世纪40年代,由于70年代的微电子技术、计算机技术、自动化技术的发展,管道检测机器人技术于90年代初得到了迅猛发展并接近于应用水平。
一般认为,法国的J.VERTUT较早从事管道机器人理论和样机的研究,1978年他提出了轮腿式管行走机构模型IPRIV,该机构虽然简单,但起了抛砖引玉的作用[]4。
日本机器人的发展经过了60年代的摇篮期,70年代的实用期,到80年代进入普及提高期,开始在各个领域广泛推广使用机器人。
日本管道机器人众多,东京工业大学航空机械系Shigeo Hirose和Hidetaka Ohno等于1993年开始研究管道机器人,先后研制成功适用于直径50mm管道的Thes-Ⅰ、Thes-Ⅱ型管道机器人和适用于直径150mm管道的Thes-Ⅲ型管道机器人。
Thes-Ⅰ型管道机器人的主要特点是轮子的倾斜角可以随着阻力大小的改变而改变,当机器人的负载较大时,轮子的倾斜角将产生变化,从而减小行走速度,增加推进力。
Thes-Ⅱ型管道机器人的总长为300mm,质量只有3l0g。
Thes-Ⅱ型管道机器人的每一节机器人单元的左右两侧分别布置着由弹簧板支撑的一对轮子,轮子由带减速齿轮箱的电动机驱动,从而实现机器人在管道中的前进和后退运动,Thes-Ⅱ型管道机器人可以很容易地在带有几个弯管接头的管道中运动。
Thes-Ⅲ型管道机器人如图1-1所示,其采用“电机一蜗轮蜗杆一驱动轮”的驱动方案,同时每个驱动轮都有一个倾斜角度测量轮,通过测量轮探测机器人的倾斜角度,并反馈给电机从而保证管道机器人的驱动轮以垂直的姿态运动。
地下管道检测机器人设计论文

一、地下管道检测机器人发展现状按照行走机构的类型,可将管内作业机器人行走机构分为轮式、履带式、蠕动式等几类。
轮式行走机构图1(a)轮式行走机构轮式机构管内作业机器人的基本形式如图1(a)所示。
对此类机器人的研究相对较多。
机器人在管内的运动,有直进式的(即机器人在管内平动),也有螺旋运动式的(即机器人在管内一边向前运动,一边绕管道轴线转动);轮的布置有平面的,也有空间的。
一般认为,平面结构的机器人结构简单,动图1(b)自来水管道检测轮式机器人作灵活,但刚性、稳定性较差,而空间多轮支撑结构的机器人稳定性、刚性较好, 但对弯管和支岔管的通过性不佳。
图1(b)为英国的PEARPOINT有限公司开发的自来水管道检测轮式机器人,可在以φ135~375mm的管径内直线行走,行走速度为0~12m/min。
履带式行走机构图2(a)履带式行走机构图2(b)海水管道检测履带式机器人图2(a)是履带式行走机构的基本形式。
这种类型的管内机器人在油污、泥泞、障碍等恶劣条件下达能到良好的行走状态,但由于结构复杂,不易小型化,转向性能不如轮式载体等原因,此类机器人应用较少。
图2(b)是日本关西电力株式会社开发的适用于管径Φ288~388mm、管长100m的海水管道检查履带式机器人,该机器人通过沿径向分布的履带在水平管和垂直管内自主行走,移动速度为5m/min。
整个地下输气管道检测维修用移动机器人系统由三大部分组成:(1)履带式移动机器人。
机器人小车上装有CCD摄像机,并可根据需要加挂其它检测单元。
(2)圆盘式收放线装置。
移动机器人通过电缆进行控制,视觉等信号也通过该线缆传输到控制计算机。
(3)控制单元。
其主体为一台工业控制计算机,负责整个机器人系统的控制、显示及信息存储等工作。
操作人员通过界面完成所有操作。
控制单元与收放线装置安装在一个专门设计的手推车体上,便于移动。
蠕动式行走机构图3 蠕动式行走机构蠕动式行走机构如图3所示。
管道机器人文献综述

管道机器人文献综述一个联动类型机械式离合器管道检测机器人摘要本文提出了一种新的管道检查机器人联动型机械式离合器,它被设计用于直径100mm的管道进行检查。
该机器人具有三动力轮链的每一个都有一个机械离合器。
使用并行设计的机械式离合器联动机制。
管道的运动模型的检测机器人被驱动,并且已经开发它的原始类型。
该机器人系统的性能都会验证仿真和实验。
引言管道机器人机制,它在机器人技术的发展上具有悠久的历史,可以分为几种初等形成的运动模式。
因此,已经开发了许多种机制轮型,尺蠖型,腿式移动型等,螺杆式,履带式,猪型和被动型。
其中,轮型管道检测机器人大多是流行 [1] - [9]。
在近10年中,差分驱动型机制进行了研究集中在[10] - [12]。
差分驱动型通常有三动力链。
每条链的速度控制独立,机器人能够通过肘部和T-支行。
此外,它有一个大的折叠范围较轮型,螺旋型,PIG型。
近日,管道检测机器人系统与其超过100毫米的小直径已经被关注、自从100mm的管道市场是越来越大了。
该大多数室内管道的直径小于100mm。
具体来说,清除室内管道直接有关人类健康。
因此,清洗和检查在内部管道成为一个重要问题。
通常情况下,管道巡检机器人系统是由机器人机构组成,通信系统,一个电源供应,而中一个用户界面。
然而,为了将它应用到真正的的环境中,一些实用的的方面(,如易用的用户)的界面,安全性,水的的证明,和检索功能应该定考虑在内。
具体而言,检索功能至关重要的,因为管道内工作的机器人,可以是无序的任何时间。
此外,机器人可以卡在在操作过程中的任何原因的管道。
在这种情况下,机器人需要采取的管道,通过使用一些检索功能。
离合器的概念是一个很好的解决方案检索功能的实现。
有两种类型的离合器机械离合器磁粉离合器。
通常,该机械式离合器保证了强劲的动力,但它通常是大型,重型,具有复杂的结构。
在相反,电磁离合器相对小尺寸,重量轻,有一个简单的结构,但它在电力中有一个限制。
自主变位履带式管道机器人GXJZ-I的研制和开发

- 1 -自主变位履带式管道机器人GXJZ-I 的研制和开发龙 斌,毛立民东华大学机械学院(200051)email:longbin@摘 要:本文主要介绍东华大学研制开发的自主变位履带式管道清洗机器人GXJZ-I。
主要包括机器人的系统功能、机械结构设计和控制系统设计。
GXJZ-I 以自主变位履带式管道机器人移动机构为运动载体,通过摇臂携带的毛刷等工作部件,可完成对通风管道进行探测、清扫等工作。
关键词:自主变位 管道 履带 机器人1.引言当前,人们已认识到中央空调风管内的灰尘是传播病毒的载体,重视了中央空调的清洗,但是结果不尽人意。
原因有三:一是我国大多数中央空调普遍使用粗效过滤器,最多只能过滤空气中40%的可悬浮颗粒物,近60%的颗粒物进入中央空调,依然为病毒载体,当通风时,仍有可能产生交叉感染。
二是目前人们只注重中央空调机组的,清洗和水处理,然而风管面积远远大于机组面积,而中央空调系统内95%以上的藏尘量在风管内,水洗仅降低机体内10%水垢的产生。
三是没有机器人参与清洗,人进入风管清洗又存在二次污染。
正因为如此,管道清洗机器人应运而生。
管道清洗机器人是用于高层楼宇、机场、宾馆等场所的中央空调通风管道以及纺织、石油、化工、电子、矿山、市政等场合的通风管道、除尘管道、输送管道检测、清洗、喷涂等的作业装置[2]。
目前,国外如丹麦Danduct Clean 公司、加拿大INUKTUN 公司等都有比较成熟的管道清洗机器人产品。
西方发达国家的管道清洗已初显产业化趋势,成立有诸多的清洗公司,有专门的空调保养公司来负责空调的定期清洗和消毒,而具体负责的空调保养工程师则由有关部门统一管理,核发资质。
国内也有相关的机器人研究。
但是,目前国内外研制开发的管道机器人图1 自主变位履带式管道机器人GXJZ-I移动机构大多以轮式和双履带式为主,仅适用于单一形状或口径的管道环境,适用性有限[3]。
东华大学机械学院成功地解决了现有管道机器人对复杂管道环境适应性的不足,开发了具有自主知识产权的自主变位履带式管道机器人GXJZ-I。
【论文】管道检测机器人结构设计及运动仿真

摘 要管道检测机器人主要包括三大系统:机械系统、控制系统和检测系统。
本文在分析了机器人总体机械结构和检测原理的基础上,通过精确的力学计算和细致的结构分析,利用AutoCAD软件对机器人的机械部分,包括整体结构、电机、齿轮、轴等进行了选择与设计,并对设计方案进行分析与计算。
然后利用Solid Edge软件将管道检测机器人的总体机械结构绘制成三维立体模型。
所设计的机器人机械系统,可通过履带式移动机构满足城市排水管道的工况,并通过加装支撑臂进行30度的爬坡。
通过细致研究,确定了机器人所使用的摄像系统和超声波检测系统。
关键词:排水管道,履带式机器人,超声波无损检测AbstractA pipeline inspection robot mainly consists of three parts, the mechanical system, the control system and the detecting system. This paper, based on the analysis of overall mechanical structure and detecting principle of the robot, by accurate mechanical calculation together with comprehensive structure analysis, the author has worked out a unique design for overall structure in AutoCAD software, motor, gears as well as axles of the robot, and the design scheme has been analyzed and calculated. Then built overall mechanical structure of pipeline inspection robot 3-D models in Solid Edge software. The design of mechanical system of the pipeline inspection robot is equipped with the tracked mobile mechanism moves along the urban drainage pipelines and two support arms can climb maximum gradient of 30 degrees. And after careful study, the camera system and the ultrasonic inspection system of the robot are also determined in the paper.Key words: Drainage pipeline, Tracked robot, Ultrasonic nondestructive inspection目 录第一章 绪 论 (1)1.1课题研究意义及背景 (1)1.2管道检测机器人的发展 (3)1.2.1管道检测机器人发展情况 (3)1.2.2 管道检测机器人类型介绍 (7)1.3管道检测机器人的技术 (9)1.4 课题研究主要内容 (9)1.5本章小结 (10)第二章 管道检测机器人机械结构设计方案确定 (11)2.1管道检测机器人移动方式结构设计 (11)2.1.1管道检测机器人移动方式分析比较 (11)2.1.2管道检测机器人移动方式选择 (13)2.2管道检测机器人总体机械结构设计 (14)2.3本章小结 (15)第三章 管道检测机器人机械结构设计计算 (16)3.1 管道检测机器人力学分析计算 (16)3.2 管道检测机器人执行机构设计 (18)3.2.1传动齿轮的设计计算 (18)3.2.2传动轴的设计计算 (25)3.3 管道检测机器人驱动系统设计 (29)3.3.1步进电机的选择 (31)3.4 本章小结 (33)第四章 管道检测机器人附属配置 (35)4.1能源供给方式的选择 (35)4.2 摄像系统的选择 (35)4.3检测系统的选择 (36)4.4电源装置的选择 (38)4.5控制装置的选择 (38)III4.6本章小结 (38)第五章 管道检测机器人三维模型设计 (39)5.1移动机构三维模型设计 (39)5.2 支撑臂机构三维模型设计 (41)5.3车体结构三维模型设计 (41)5.3.1车体内部结构三维模型设计 (41)5.3.2车体上方结构三维模型设计 (42)5.3.3车体前方结构三维模型设计 (43)5.4整体结构三维模型设计 (43)5.5本章小结 (45)第六章 管道检测机器人稳定性分析 (46)6.1承载能力 (46)6.2检测系统 (47)6.3质量优化 (47)6.4本章小结 (48)第七章 经济技术分析报告 (49)第八章 总结与展望 (50)8.1总结 (50)8.2展望 (50)参考文献 (52)致 谢 (54)声 明 (55)IV第一章 绪 论1.1 课题研究意义及背景近年来,随着我国经济的快速发展,城市发展的步伐也逐渐加快,煤气、输水、油气、通讯、化工以及其他用途的管道急剧增加。
管道机器人毕业设计正文
设计内容主要结论第一章概述1. 1 机器人概述机器人----这一词最早使用始于1920年至1930年期间在捷克作家凯勒尔*凯佩克(Karel capek)的名为"罗莎姆的万能机器人"的幻想剧中,一些小的人造的和拟人的傀儡绝对地服从其主人的命令。
这些傀儡被称为“机器人”。
该单词起源于捷克语“robota”。
意思是“强制的劳动”。
机器人的组成与人类相似。
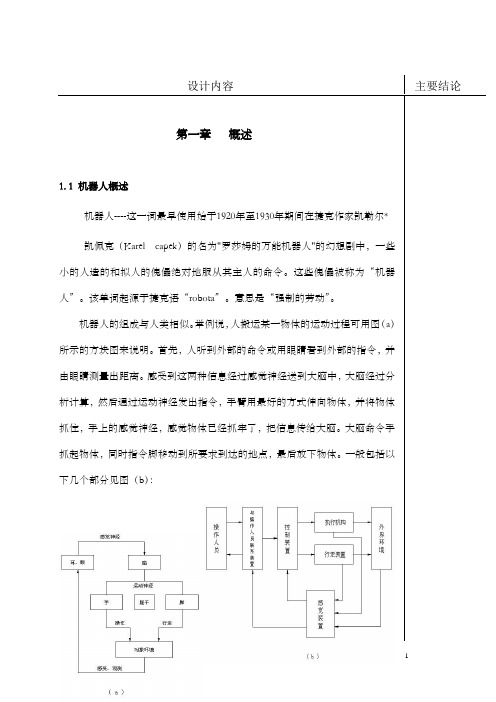
举例说,人搬运某一物体的运动过程可用图(a)所示的方块图来说明。
首先,人听到外部的命令或用眼睛看到外部的指令,并由眼睛测量出距离。
感受到这两种信息经过感觉神经送到大脑中,大脑经过分析计算,然后通过运动神经发出指令,手臂用最好的方式伸向物体,并将物体抓住,手上的感觉神经,感觉物体已经抓牢了,把信息传给大脑。
大脑命令手抓起物体,同时指令脚移动到所要求到达的地点,最后放下物体。
一般包括以下几个部分见图(b):设计内容主要结论1----能源2----控制系统3----收放线装置4----X射线控制5----驱动装置6----X射线机7----视觉定位装置8----防护罩9----管道壁上海交通大学研发了小口径管道内蠕动式移动机构。
它是模仿昆虫在地面上爬行时蠕动前进与后退的动作设计的。
其主要机构由撑脚机构、三个气缸(前气缸、中气缸、后气缸)、软轴、弹簧片、法兰盘组成。
针对微小空间、微小管道实时探测的要求,研制成电磁驱动微小型管道机器人样机。
微小管道机器人由四个电磁驱动单元组成。
其驱动机理模拟生物体的蠕动爬行。
它是通过给线圈加一系列的时序脉冲进行控制,依次使各单元动作,达到蠕动爬行的运动。
西安交通大学设计制作了蠕动式微动直线自行走机构。
这种行走机构以电致伸缩微位移器做驱动器,以电磁铁机构作为可吸附于行走表面的保持器。
广州工业大学借用仿生学原理,研制成结构独特的,像蠕虫一样的微管道机器人的运动由电磁力驱动。
机器人由前后两个电磁线圈和前后两个驱动器组设计内容主要结论成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(智能制造)论文正文管道履带式机器人管道射线探伤机器人结构设计前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一,长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中,在国民经济中占有重要地位。
随着“开发大西部”以及“西气东输”的战略指导方针,长输油气管道的数量在不断增加。
由于历史原因,国内在役长输油气管道中部分管材制管质量较差,加上施工建设过程中存在部分焊接缺陷和涂层缺陷,这给管道的安全运行埋下隐患,即使部分投产验收合格的管道,在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素影响,服役一段时间后产生缺陷或导致缺陷扩展,并可能最终发生失效,给人民生命财产、工业生产和社会稳定构成威胁。
如何检测发现管道缺陷,事前对含缺陷管道进行评价和预测(含缺陷管道的剩余强度评价,含缺陷管道的剩余寿命预测),确保在役油气长输管道安全可靠运行是目前世界各国普遍关注和迫切需要解决的重大课题。
由于在前面所述的一般工业、石油天然气、军事装备等领域中,管道作为一种有效的物料输送手段而广泛应用。
为提高管道的寿命、防止泄漏等事故的发生,就必须对管道进行有效的检测维护等。
而目前管道检测和维护多采用管道机器人来进行。
所谓管道机器人就是一种可沿管道内部或外部自动行走、携带一种或多种传感器件如位置和姿态传感器、超声传感器、涡流传感器等以及操作机械如管道裂纹与管道接口焊接装置、防腐喷涂装置、操作手、喷枪、刷子等。
在工作人员的遥控操纵或计算机控制下可在极其恶劣的环境中.能够完2成一系列管道检测维修作业的机电一体化系统。
管道机器人可完成的管道作业有:生产、施工过程中的管道内外质量检测;管道内部清扫、抛光、焊接、喷涂等维护;对接焊缝的探伤、补口作业;旧管道腐蚀程度、破损情况检测和泄漏预报等等。
基于目前管道探伤机器人的研究现状,本课题主要研究目的是通过对管道X射线无损检测探伤机器人设计,及相关技术的查阅和应用,能够研制一台具有良好的弯道通过能力、视觉定位能力并能适应较长距离检测作业的实用样机。
管道射线探伤机器人结构设计1绪论管道机器人在人类社会中已经迅速的漫延开来,这一切都应归公于它自身的特点。
因此,国内外都在不断的开发和研制更适合管内行走的管道机器人,并开始走向微型化、智能化,使之性能更宜人化,可控性更好,准确性更高。
但是管道机器人由于受到它工作环境的限制和沉重的任务负担,致使它也不断面临着更多,更严重的困难和问题。
如何解决?已经成为现代人的责任和发展方向。
1.1管道机器人发展概况1.1.1国外管道机器人研究进展国外关于燃气管道机器人的研究始于20世纪40年代,由于70年代的微电子技术、计算机技术、自动化技术的发展,管道检测机器人技术于90年代初得到了迅猛发展并接近于应用水平。
一般认为,法国的J.VERTUT较早从事管道机器人理论和样机的研究,1978年他提出了轮腿式管内行走机构模型IPRIV,该机构虽然简单,但起了抛砖引玉的作用。
日本机器人的发展经过了60年代的摇篮期,70年代的实用期,到80年代进入普及提高期,开始在各个领域内广泛推广使用机器人。
日本管道机器人众多,东京工业大学航空机械系Shigeo Hirose和Hidetaka Ohno等于1993年开始研究管道机器人,先后研制成功适用于直径50mm管道的Thes-Ⅰ、4Thes-Ⅱ型管道机器人和适用于直径150mm管道的Thes-Ⅲ型管道机器人。
Thes-Ⅰ型管道机器人的主要特点是轮子的倾斜角可以随着阻力大小的改变而改变,当机器人的负载较大时,轮子的倾斜角将产生变化,从而减小行走速度,增加推进力。
Thes-Ⅱ型管道机器人的总长为300mm,质量只有3l0g。
Thes-Ⅱ型管道机器人的每一节机器人单元的左右两侧分别布置着由弹簧板支撑的一对轮子,轮子由带减速齿轮箱的电动机驱动,从而实现机器人在管道中的前进和后退运动,Thes-Ⅱ型管道机器人可以很容易地在带有几个弯管接头的管道中运动。
Thes-Ⅲ型管道机器人如图1-1所示,其采用“电机一蜗轮蜗杆一驱动轮”的驱动方案,同时每个驱动轮都有一个倾斜角度测量轮,通过测量轮探测机器人的倾斜角度,并反馈给电机从而保证管道机器人的驱动轮以垂直的姿态运动。
该管道机器人系统通过CCD摄像头实现信息的采集,整个系统采用拖缆控制方式,检测距离超过100m。
图1-1 Thes-Ⅲ型管道机器人Fig.1-1 Thes-ⅢPipeline robot美国是机器人的诞生地,早在1962年就研制出世界上第一台工业机器人,是世界上的机器人强国之一,其基础雄厚,技术先进,并有很多管道机器人产品。
美国Inuktun公司系列管道检测机器人Versatrax是国外现有的已成型管道机器人。
Versatrax 150 检测管道最小直径为150mm,防水深度30m,电管道射线探伤机器人结构设计缆范围160m,速度0~10m/min,有效载荷92kg,CCD彩色直视摄像头。
Versatrax 300”VLR检测管道最小直径为3omm,防水深度30m,电缆范围1830m,速度0~10m/min,有效载荷184kg,CCD彩色直视摄像头。
美国纽约煤气集团公司(NYGAS)的DaphneD’Zurko和卡内基梅隆大学机器人技术学院的HagenSchempf博士在美国国家航空和宇宙航行局(NASA)的资助下于2001年开发了长距离、无缆方式的管道机器人系统——EXLORER,专门用于检测地下煤气管道的情况,如图1-2所示。
该管道机器人系列EXPLORER就有如下特征:(1)一次作业检测距离长,采用无缆方式,自带电池并且电池可以多次反复充电,使管道机器人具有良好的自推进能力。
(2)可以在铸铁和钢质煤气管道中,低压和高压条件下工作。
(3)管道机器人的彩色摄像头采用嵌入式“鱼眼”镜头,结构非常紧凑。
(4)可以顺利通过90。
的弯管接头和垂直管道。
(5)与外部操作人员采用无线通讯方式。
(6)该管道机器人可以探测煤气管道内部是否水渗透、碎片堆积;可以确定管道内部缺陷的确切位置并且定位相应的作业装置;采用视频图像的形式准确地反映管道内部的状况条件。
图1-2 EXLORER管道机器人Fig.1-2 EXLORER Pipeline robot德国工业机器人的总数占世界第三位,仅次于日本和美国。
德国学者Bemhard Klaassen、Hermann St—reich和Frank Kirchner等人在德国教育部的资助下于2000年研制成功了多关节蠕虫式管道机器人系统——6MAKRO。
该机器人由六节单元组成,其头部和尾部两个单元体完全相同,每个单元之间的节点由3个电动机驱动,使得MAKRO可以抬起或者弯曲机器人个体,从而可以轻松越过障碍物或实现拐弯运动,该管道机器人系统MAKRO 具有21个自由度,长度为2m,质量为50kg,采用无缆控制方式,MAKRO 系统使用于直径为直径300~直径600mm的管道。
加拿大INUKTUN公司的双履带式管内机器人行走机构,履带采用刚性支承结构,两履带的夹角可以调节,以适应不同的作业管径。
两履带调节到平行位置时,可以在平地或矩形管道内行走。
但这种刚性支承的双履带式管内机器人行走机构的两履带夹角在行走过程中是无法改变的,因此不适应管径变化的作业场合。
Kawaguch等研制的管道检测机器人系统只适用于200mm的管道,而且一次作业的检测距离不大于500m;Kuntze等采用四轮独立伺服驱动方案研制成管道检测机器人系统KARO,该机器人系统只能实现对200mm管径的地下输水管道的检测,一次检测距离为400m,系统采用拖缆控制方式。
1.1.2国内管道机器人研究进展国内管道机器人研究进展国内在管道机器人方面的研究起步较晚,而且多数停留在实验室阶段。
哈尔滨工业大学邓宗全教授在国家“863”计划课题“X”射线检测实时成像管道机器人的研制”的支持下,开展了轮式行走方式的管道机器人研制。
该机器人具有以下特点:(1)适应大管径(大于或等于直径900mm)的管道焊缝X射线检测。
(2)一次作业距离长,可达2km。
(3)焊缝寻址定位精管道射线探伤机器人结构设计度高为±5mm。
(4)检测工效高,每道焊缝(直径900mm为例)检测时间不大于3min;实现了管内外机构同步运动作业无缆操作技术,并研制了链式和钢带式两种新型管外旋转机构,课题研究成果主要用于大口径管道的自动化无损检测。
上海大学研制了“细小工业管道机器人移动探测器集成系统”。
其主要包含20mm内径的垂直排列工业管道中的机器人机构和控制技术(包括螺旋轮移动机构、行星轮移动机构和压电片驱动移动机构等)、机器人管内位置检测技术、涡流检测和视频检测应用技术,在此基础上构成管内自动探测机器人系统。
该系统可实现20mm管道内裂纹和缺陷的移动探测。
上海交通大学研制出一种呈正方形体,由12个蠕动元件组成的管内蠕动机器人,外形尺寸为35mm×35mm×35mm,体重19.5g(包括控制电路),步行速度为15mm/min,共有12个自由度,由SMA(形状记忆合金)与偏置弹簧组成一个驱动源,共12个驱动源。
能实现管内上、下,左、右,前、后的全方位运动,能通过直管、曲率半径较大的弯管,以及L型、T型管。
在北京市优秀人才项目的资助下,进行了仿蝎型管道机器人的研究工作。
选择蝎子作为管道机器人模仿的对象,一方面是因为蝎子能在较复杂的地形上轻易而顺利地行走,另一方面是因为蝎子的反射作用要比那些哺乳动物要简单得多,控制算法较易实现。
仿蝎管道机器人可以相对较易地跨过比较大的障碍,并且机器人的足所具有的自由度可以使机器人的运动更加灵活,可以在可达到的管面上选择最优支撑点,即使在管面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如,对凹凸不平表面的适应能力更强,机构模型如图81-3所示。
图1-3仿蝎管道机器人机构模型Fig.1-3 Model for imitation robot scorpion pipe1.2典型的管道机器人1)蠕动式管道机器人1988年,Ikuta等引用蚯蚓运动的原理开发出了蠕动机器人,后来随着蠕动机器人技术的不断完善,其开始向大型化发展,目前已可在200~300 mm 的管道内应用。
蠕动式管道机器人主要由蠕动部分、头部、尾部组成,如图1-4所示,1—头部,2—蠕动部分,3—尾部。
前部和尾部支撑分别装有超越离合锁死装置,实现单向运动自锁。
中问蠕动部分提供机器人运动的动力。
对于蠕动动力机构,目前有很多实现形式:如上海大学利用气压伸缩驱动;上海交通大学利用形状记忆合金伸缩驱动;昆明理工大学利用电磁吸合驱动如图1-5,1—磁铁,2—弹簧,3—线圈等。