循迹小车挑出的主要使用的电路图
循迹小车全资料

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
循迹小车电路分析2PPT优秀版
年12月12日
平凉信息工程学校电工电子教研室
•LM393集成电路
LM393是双路电压比较器集成电路,由两个独 立的精密电压比较器构成。它的作用是比较两个 输入电压,根据两路输入电压的高低改变输出电 压的高低。输出有两种状态:接近开路或者下拉 接近低电平,LM393采用集电极开路输出,所以 必须加上拉电阻才能输出高电平。
年12月12日
平凉信息工程学校电工电子教研室
•电机驱动部分:通过控制三极管的导通截止,驱动减速直流电机转动,并使转向
指示灯发光。
•发光二极管 •年12月12日
•年12月12日
•值在有无明光显照减(小本用。手电或路物遮中住光所)用的情的况下二万极用表管测得是阻发值大光,有二光极照表管针指,示电阻 •基于分数字别电路为的 型红外发光二极管和 型发光二极管。
确。若测得阻值超过该电阻的误差 范围、阻值无限大,阻值为0或阻值 不稳,说明该电阻器已坏。
年12月12日
平凉信息工程学校电工电子教研室
•电位器的检测
首先测量两固定端之间电阻值是否正常, 若为无限大或为零欧,或与标称相差较大, 超过误差允许范围,都说明已损坏;电阻体 阻值正常,再将万用表一只表笔接电位器滑 动端,另一只表笔接电位器(可调电阻)的 任一固定端,缓慢旋动轴柄,
•发光二极管检测
发光二极管具有单向导电性,使 用R×10k档可测出其正、反向电阻。 一般正向电阻应小于50k欧姆,反向 电阻应大于200k欧姆。若正、反向 电阻均为零,说明内部击穿短路。 若正、反向电阻均为无穷大,证明 内部开路。
年12月12日
平凉信息工程学校电工电子教研室
• 三极管
本电路所用三极管型号为 8550,它是一种低电压,大电流, 小信号的PNP型硅三极管 集电极 -基极电压Vcbo:-40V ,工作温度: -55℃ 到+150℃ ,主要用途:开 关应用,射频放大。
寻迹小车部分电路图

各部分电路图及说明:稳压电路:(上部分稳压至12V,下部分稳压至5V)L298电机控制驱动:可以参考/read.php?tid=252&page=1&toread=1电压比较器电路(光电对管检测电路):可调电阻R3可以调节比较器的门限电压,经示波器观察,输出波形相当规则,可以直接够单片机查询使用。
而且经试验验证给此电路供电的电池的压降较小。
因此我们选择此电路作为我们的传感器检测与调理电路。
使用极为不方便,但由于我们的车体设计时留出了足够的空间,并且蓄电池的价格比较低。
因此我们选择了此方案。
综上考虑,我们选择了方案3。
这个黑呼呼的东西,让我们可爱的小车变得很难看。
稳压模块:方案1:采用两片7812将电压稳压至12V后给直流电机供电,然后采用一片7809将电压稳定至9V,最后经7805将电压稳至5V,给单片机系统和其他芯片供电,但7809和7805压降过大,使7809和7805消耗的功率过大,导致7809和7805发热量过大,因此,我们放弃了这种方案。
方案2:采用两片7812将电压稳压至12V后给直流电机供电,然后采用2576将电压稳至5V。
2576的输出电流最大可至3A,完全满足系统要求。
综上考虑,我们选择了方案2。
稳压模块如下图:(左图:稳压模块)循迹传感器模块方案1:用光敏电阻组成光敏探测器。
光敏电阻的阻值可以跟随周围环境光线的变化而变化。
当光线照射到白线上面时,光线发射强烈,光线照射到黑线上面时,光线发射较弱。
因此光敏电阻在白线和黑线上方时,阻值会发生明显的变化。
将阻值的变化值经过比较器就可以输出高低电平。
但是这种方案受光照影响很大,不能够稳定的工作。
因此我们考虑其他更加稳定的方案。
方案2:用红外发射管和接收管自己制作光电对管寻迹传感器。
红外发射管发出红外线,当发出的红外线照射到白色的平面后反射,若红外接收管能接收到反射回的光线则检测出白线继而输出低电平,若接收不到发射管发出的光线则检测出黑线继而输出高电平。
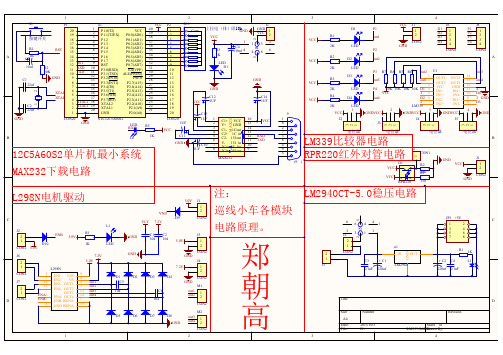
巡线小车各模块电路原理图-郑朝高
上拉电(排)阻10k GND
1 C4 10uf 4
2
VCC
GND 1 VCC 2 1 4
5 5 2
P1 out1 GND
3 6
3
R3 1K LED D1
out2
GND GND C12 1UF
LED D4 LED 1
VCC C13 1UF
9 1 2 3 4 5 6 7 8 C1+ VCC V+ GND C1- 1Cout C2+ 1C in C2- 151out V- 151 in 2Cout 25 1in 2Cin 251out MAX232 (9 ) 16 15 14 13 12 11 10 9 VCC 1 6 2 7 3 8 4 9 5
VCC J2
GNDVCC J5
GND
CON20
电位器
电位器
电位器
B
RXD TXD
C10 1UF
12C5A60S2单片机最小系统 MAX232下载电路 L298N电机驱动
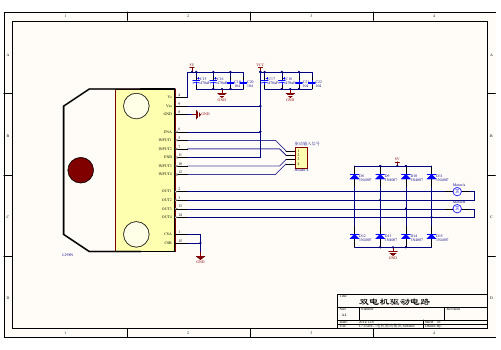
C L1 J2 2 1 CON2 5.0V J6 2 1 CON2 J7 2 1 D CON2 5 7 10 12 ENA6 ENB 11 8 5.0V L298N EN1 VSS EN2 VS EN3 OUT1 EN4 OUT2 OUT3 ENA OUT4 ENB ISENA GND ISENA 9 4 2 3 13 14 1 15 D1 C5 104 D2 D3 D4 GND 7.2V 7.2V GND GND ENB D10 5.0V 1K LED R1 GND C1 104 C2 104 VCC 7.2V
Print Date:
41550
#Column Name #Column Error:Footprint Name Error:Comment #Column Name Error:LibRef #Column Name Error:Designator
电子设计竞赛-寻迹避障一体小车-

循迹避障一体小车一)小车功能实现描述利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行泄,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开, 绕开后继续寻迹。
二)电路详细分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线, 黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到口线,与黑线相反,反射的红外线很强,使光敬三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于口线宽度最合适,一般口线宽度选择范围为3 - 5厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到口线却不能送出相应的信号,通过调节传感器上的可调电阻,适肖的增大或减小灵墩度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴口线边缘,笫二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到口线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离口线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走, 在此过程中(直走)小车若遇白线,小车乂重复上面动作跟着白线走。
循迹小车电路图
COR16 R16 1K COU5 U5
2
PIR1602
VCC_1
Header 6
1K
LED0
PISTC1029 30 PISTC1030
COR15 R15
PIR1502 PIR1501
29 31
PISTC1018 PISTC1019
18 19
1K
PIU204 PIU201
PIC1202 PIC1201
双电机驱动电路
Number 2014/12/6 C:\Users\..\电机驱动模块.SchDoc Sheet of Drawn By: 4 Revision
D
1
2
3
4 8V
COD1 D1
VCC_1
PID101 COµçÔ´½Ó¿Ú1 电源接口 1 PID102
COLM7805 LM7805
1 PILM780501
PISTC1021 PISTC1022
11 PIU3011 12 PIU3012 13 PIU3013 14 PIU3014 15 PIR1101 PIR1102 PIU3015 NLGNDPIU3016 16 GND COR11 10 R11
10 PIU3010
E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 BLA BLK
Header 4
PIL298N012
PID802
PID801
COD8 D8 1N4007
PID902
PID901
COD9 D9 1N4007
PID10 2
PID10 1
COD10 D10 1N4007
PID1 02
PID1 01
COD11 D11 1N4007 COMotorA MotorA
寻迹小车各模块电路原理图
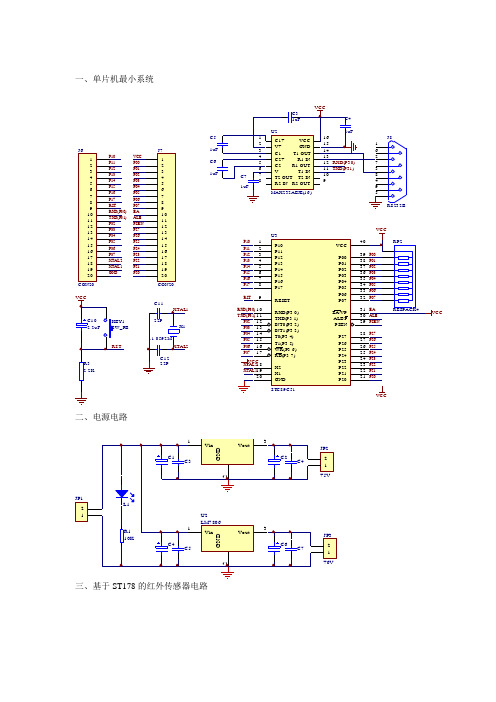
一、单片机最小系统
二、电源电路
U1
三、基于ST178的红外传感器电路
+5
注意事项:
1、请首先查询ST178的器件手册,确定各引脚的功能,然后再对照电路原理图焊接。
2、建议首先设计PCB ,然后根据PCB 焊接实物。
四、基于LM324的比较器电路(输出高电平5v ,低电平)
P 10
五、电机驱动电路
注意事项:
1、图中的Rs3、Rs4、Rq1、Rq2不要省,否则可能因为单片机带负载能力不强而不能正常工作。
2、在写程序时,不能让Qi 、Hi 同时为低电平,否则会使Q9~Q12短路导通,并很快被烧毁。
同理,不能让Li 、Ri 同时为低电平。
3、建议首先画出PCB ,然后根据PCB 焊接电路。
4、建议同学们先焊接图中的上半部分所示的一路驱动电路,测试成功后再焊接下半部分那一组电机驱动电路。
循迹小车

摘要本系统的循迹传感模块由TI指定电感传感器芯片LDC1000配合PCB线圈实现,采用STM32 和KL26两片单片机作为控制核心,通过PWM的方式实现直流电机控制。
利用万向轮和差速直流电机实现小车转向,采用编码器测速,并能够用显示屏显示实时数据。
系统利用谐振频率检测铁丝,利用等效阻抗检测硬币,提升了检测的灵敏度,使检测准确率达到95%以上。
通过测试实现了部分基本部分(1)(2)(3),并增加了按键功能。
关键词:双单片机控制核心,LDC1000,差速直流电机abstractThe tracking sensor module of this system designated by the TI coil inductance sensor chip LDC1000 with PCB implementation, using STM32 and KL26 two pieces of single chip microcomputer as control core, through the way of PWM dc motor control. Using the universal wheel and differential dc motor to realize the car turned, using encoder speed, and can use screen shows real-time data. Wire system using resonant frequency detection, using the equivalent impedance detection of COINS, improve the detection sensitivity, the detection accuracy above 95%. By testing the basic parts (1) (2) (3), and increased the function keys.Key words: double single chip microcomputer as control core, LDC1000, differential dc motor1.系统方案论证1.1循迹传感器方案按照题意,需要设计制作一个自动循迹小车,并只能用LDC1314或LDC1000点感数字转换器作为循迹传感器(且只限定一片),跑道标识为一根直径为0.6~0.9mm的细铁丝。