电动液压助力转向系统控制算法研究与实现
汽车电动助力转向系统设计 毕业论文

汽车电动助力转向系统设计毕业论文本章主要介绍汽车电动助力转向系统设计的背景和意义,以及论文的目的和结构安排。
汽车转向系统是车辆控制的重要组成部分,它直接影响着驾驶员的操控感受和行车安全性。
随着科技的发展,传统的液压助力转向系统逐渐被电动助力转向系统所取代。
电动助力转向系统通过电力传动装置提供操控力,相较于液压助力转向系统具有更高的效率、更好的节能性和可靠性。
本文的目的是设计一种可靠、高效的汽车电动助力转向系统。
在研究的基础上,将重点关注系统的结构设计、控制算法优化、故障诊断等方面。
通过对系统的设计和优化,可以提高汽车的操控性和安全性。
本文结构安排如下:第二章将介绍汽车电动助力转向系统的背景与发展;第三章将详细阐述系统的设计原理与结构;第四章将重点探讨控制算法的优化与实现;第五章将研究系统的故障诊断方法与技术;最后,第六章将总结全文,并提出进一步研究的展望。
通过本文的研究和实践,相信可以为汽车电动助力转向系统的设计与优化提供一定的参考和借鉴,推动汽车技术的发展与进步。
在这一部分,我们将对汽车电动助力转向系统设计相关的文献进行综述。
我们将总结已有的研究成果,以及当前存在的问题。
具体内容}本文详细介绍了汽车电动助力转向系统设计的方法和步骤,涵盖了传感器选择、电机控制、系统优化等方面。
传感器选择在汽车电动助力转向系统设计中,选择合适的传感器是至关重要的。
传感器可以检测车轮的转向角度、转向速度以及转向力等参数,为后续的电机控制提供必要的数据支持。
常见的传感器包括转向角度传感器、转向速度传感器和转向力传感器。
在选择传感器时,需考虑其精度、响应速度和可靠性等因素,并确保其能与电机控制系统良好地配合。
电机控制在汽车电动助力转向系统中,电机控制是实现转向功能的核心部分。
电机控制系统通过接收传感器提供的数据,计算并控制电机的输出力矩,从而实现汽车的转向功能。
电机控制的关键是控制算法的设计和实现。
常见的电机控制方法有PID控制、模糊控制和神经网络控制等。
电动助力转向系统模糊控制算法研究
电动 助力转 向系统模糊控 制算法研 究
张传 红 . 陆静平 , 徐 亚茹
( 广西大学 机械工程学院 , 广西 南宁 5 3 0 0 0 4 )
摘 要: 针对 电动助 力转 向 系统( E P s ) 对控 制 系统的 实时性 、 稳定性 的要 求 , 提 出了一种应 用于 E P S的模糊控制 算法 , 并
Z O N M N M N S Z 0 P S P S P M
3 3
E q u i p me n t Ma n u f a c t u i r n g T e c h n o l o g y No . 2, 2 01 4
表中的模糊控制规则可用模糊关系矩阵 尺表示。 R =U ( E ×E × )
l
表 1 模糊控制规则表
E C
全行驶的重要保 障。 E P S的特殊工作环境要求助力电 E P S模糊控 制算法 机能够稳定 、 可靠 的频繁启停 , 这就需要采用更加先 2
E P S 作为一种新型节能 、 实用的装置将会被大规 模应用在各种运输工具上 ,而 E P S 控制器与助力 电 制精 度 , 但也存在一定 的局限性[ 1 】 : P I 控制 的本质是 机 的匹配是 E P S 正常 、 高效工作的关键 。 模糊控制是 种线性控制 ,若被控对象具有非线性特性或有参 建立在模糊 推理基础上的一种非线性控制策略。它 变量发生变化 ,会使得线性常参数的 P I 控制无法保 不依赖于控制系统的数学模型 ,对系统参数 的变化 持设计 时的性能指标 。 为满足 E P S 控制 的快速性、 稳 不敏感 , 当系统负载、 对象参数发生大范 围变化及受 定性和鲁棒性条件 ,智能控制方法是最佳选择 。其 到非线性因素影响时 , 也能取得好的控制效果。较传 中, 模糊控制正是智能控制 中应用广泛 、 最 为常见的 统的 P I D控制 ,模糊控制能更好的适应实际生产需 方法 之 一 [ 2 ] 。 要及应用 。 模糊控制器的设计包括模糊 化、 模糊推理 和 清 晰化 三个 部 分 。 1 E P S实验 平台 2 . 1输入输出变量的确定及模糊化 驾驶员操纵方 向盘将其转 向意图 由扭矩传感器 根 据 电机 驱动部 位 和减速 装置安 装位 置的不 转化为扭矩信号输入到控制器 ,控制器控制助力 电 同, E P S 可分为三类 : 轴助力式 、 小齿轮助力式 和齿条 机 , 实现转向的方向、 大小及快慢的变化。选取二维 助力式 。 本文实验所用 E P S 实验平台为轴助力式 , 主 模糊控制器 ,输入量分别为扭矩传感器 的输入扭矩 要由 E P S 控制器、 扭矩传感器 、 电动机 、 减速器 、 传动 偏 差 e和偏差 的变化率 e c ,输出量为控制电机转速 机构 和转 向机构等组成 。助力电机采用无刷直流电 的 P WM信号占空比 。模糊控制器结构如图 1 所示。
基于模糊控制的电动助力转向系统控制方法研究

7 ( N・ m )
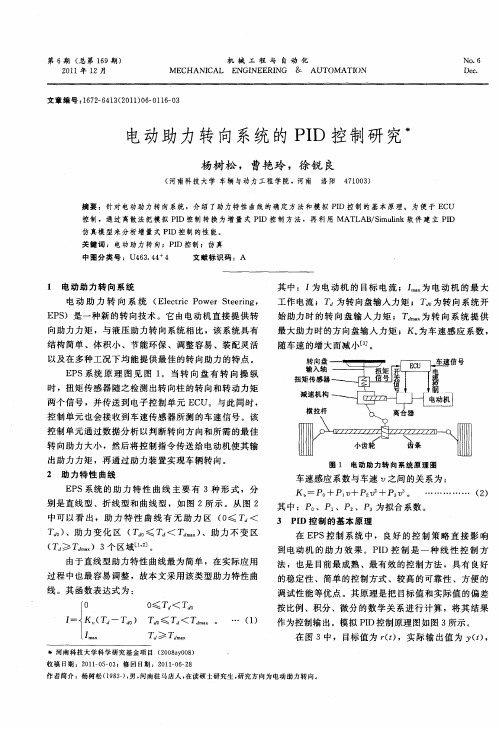
图 l 不 同车 速 下 直 线 型 助 力 特 性 曲线
2 模糊 自整定 P I D参 数控 制算 法设计
模糊控 制 和 P I D控 制 相 结 合 , 发 挥 其 各 自的 优 点 , 可 提高 E P S系统 的控制 性能 。
和误差 变化 率 e 之间 的模糊 关 系 , 在控 制 过 程 中不 断
对于 E P S系统 , 当 车速 和方 向盘 转 角 改 变 时 , 助 力 电动 机提供 的转 向助力 也应 随之变 化 。理 想的助 力
检 测 e和 e , 由当前 e和 所 对应 的参 数调 整量 A K 、
模 糊控 制具 有智 能控 制理 论 技 术 的 特 点 , 对 于 复杂 对 象 的控 制 效 果 远 远 超 过 常 规 的 P I D 控 制[ 4 ] 。如 果 将
于前轴 负 荷较小 的 车型 , 在 助 力 变化 区助 力 转 矩 与 方 向盘 的转矩 呈线性 关 系[ 5 ] , 其 数据 量小 , 利于 控制 系 统 的设计 , 在 实际 中容 易 调 整 。不 同 车速 下 直 线 型 助 力
中 图分 类 号 :U4 6 3 . 4: T P 2 7 3 . 4 文 献 标 识 码 :A
0 引 言
汽车电动助 力转 向 系统 ( E l e c t r i c P o we r S t e e r — i n g , E P S ) 用 电池作 为 能 源 , 电 动机 为 动力 , 以方 向盘 的转 速和转 矩 以及车 速 为输 入 信号 , 通 过 电子 控 制 装 置对 电动机 进行 相应 的控制 , 从 而 实现 助力 转 向 , 以 达 到转 向轻 、 操 纵 稳 的 效 果[ 1 ] 。但 在 实 际 工 作 中 因 噪 声、 路 况 等 因素 的 影 响 , E P S系 统 的工 作 情 况 复 杂 多 变, 为 了达到较 为理想 的控制 效果 , 在控 制 策略 和算 法 上都 要有 较为合 理 的设 计 。 在 助力 电动机 的控 制 上 , 以往 常 用 的方 法 是 P I D 调 节控 制 , 利 用 电动 机转矩 和其 电流 成 比例 的特性 , 通 过 调节 P I D控制 器各参 数 , 控 制 助力 电动 机 的端 电压 或 电流 。常规 P I D控制 可 减少 调 节 时 间 , 提 高 系统 的 响应速 度 , 改 善 系统 的动 态性 能 , 但是抗干扰能力差 , 不能在 线整 定参 数 , 对 于 时 变 的复 杂 系 统 控 制效 果 不 理想【 3 ] , 因此 不 能使 E P S系 统 获 得 满 意 的 控 制 效 果 。
电动助力转向系统的PID控制研究
3 P D控制 的基本原 理 I
) 、助力 不 变 区
在 E S控 制 系统 中 ,良好 的 控 制 策 略直 接 影 响 P
到 电动机 的 助 力 效 果 。P D控 制 是 一 种 线 性 控 制 方 I 法 ,也是 目前最 成熟 、最 有效 的控 制方法 ,具有 良好
出助力力 矩 ,再 通过 助力装 置实现 车辆转 向 。
2 助 力特性 曲线
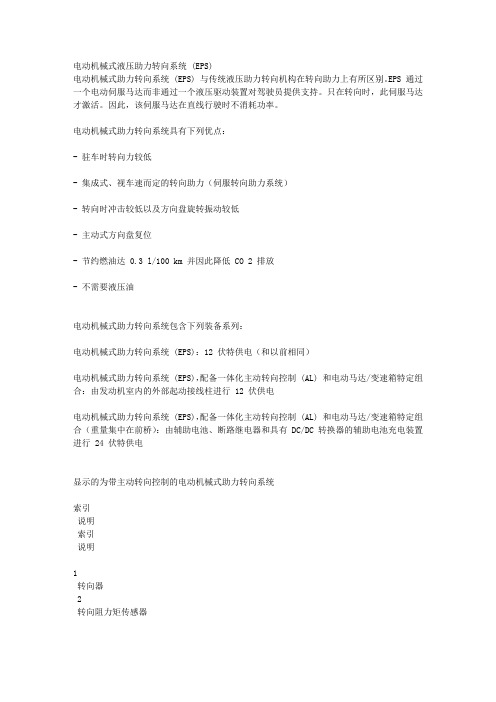
图 1 电动 助 力 转 向 系统 原 理 图
车速 感应 系数与 车速 之 间 的关 系 为 :
K Po P1 一 + + P2 + P3 。 ……… …… () 2
E S系统 的助 力 特性 曲线 主要 有 3种 形 式 ,分 P 别 是直线 型 、折 线型 和 曲线型 ,如 图 2所示 。从 图 2 中可 以看 出 ,助 力 特 性 曲线 有 无 助 力 区 ( ≤ < 0 T 。 、助力 变 化 区 ( a≤ T < a) T。 j
O T <T 0 ≤ j a
。 ≤ < 。 … () 1
按 比例 、积分 、微分 的数 学关 系进 行计 算 ,将其 结果
作为控制输 出。模 拟 PD控 制原理 图如 图 3 示 。 I 所 在图 3中, 目标值 为 r £ ,实 际输 出值 为 () () f,
.
【 J
1 电动 助力转 向系统
其 中:f 电动 机 的 目标 电流 ;J 为 电 动 机 的最 大 为 一
工 作 电流 ; 为转 向盘输入力 矩 ; 为转 向系统开
电动 助 力 转 向 系 统 ( l t cP we teig E e r o rS er , ci n E S P )是一种 新 的转 向技 术 。它 由电动机 直 接提 供 转
电动机械式液压助力转向系统 (EPS)
电动机械式液压助力转向系统 (EPS)电动机械式助力转向系统 (EPS) 与传统液压助力转向机构在转向助力上有所区别。
EPS 通过一个电动伺服马达而非通过一个液压驱动装置对驾驶员提供支持。
只在转向时,此伺服马达才激活。
因此,该伺服马达在直线行驶时不消耗功率。
电动机械式助力转向系统具有下列优点:- 驻车时转向力较低- 集成式、视车速而定的转向助力(伺服转向助力系统)- 转向时冲击较低以及方向盘旋转振动较低- 主动式方向盘复位- 节约燃油达 0.3 l/100 km 并因此降低 CO 2 排放- 不需要液压油电动机械式助力转向系统包含下列装备系列:电动机械式助力转向系统 (EPS):12 伏特供电(和以前相同)电动机械式助力转向系统 (EPS),配备一体化主动转向控制 (AL) 和电动马达/变速箱特定组合:由发动机室内的外部起动接线柱进行 12 伏供电电动机械式助力转向系统 (EPS),配备一体化主动转向控制 (AL) 和电动马达/变速箱特定组合(重量集中在前桥):由辅助电池、断路继电器和具有 DC/DC 转换器的辅助电池充电装置进行 24 伏特供电显示的为带主动转向控制的电动机械式助力转向系统索引说明索引说明1转向器2转向阻力矩传感器EPS 控制单元4集成有马达位置传感器的伺服马达5EPS 单元部件简短描述将描述电动机械式助力转向系统的下列部件:EPS 单元EPS 单元由下列部件组成:- EPS 控制单元- 集成有马达位置传感器的伺服马达EPS 控制单元是电动机械式助力转向系统的一部分。
EPS 控制单元通过 2 个插头连接与车载网络连接。
转向阻力矩传感器通过另一个插头连接与 EPS 控制单元连接。
在 EPS 控制单元中存储了多条用于伺服助力装置、主动式方向盘复位以及减震特性的特性线。
根据输入端参数计算出的数值与相应的特性线一起得出必要的转向助力。
根据不同的装备系列,为 EPS 单元提供不同的总线端 Kl. 30。
汽车电动助力转向控制系统的研究与开发

1绪论 1 E S 绍 1 P 介 E S由扭 矩 传感 器 、速度 传感 器 、转 向角传 感 器、 电子控 制装 置、 电 P 动 机 、离 合器 、减 速 器 和 齿 轮 齿 条 转 向机 构 等 组 成 。 其工作是 由检 测传感装 置将所需信 息输入控制 单元, 再由控 制单元对 这些 信 号进行运算 后得到…个 与行驶情 况相适 应的力矩, 最后 发 出指令 使 电动 机工 作 。 1 P 优点 2 E S ES P 具有 以下优点 : 1 节约 了能源 消耗 () () 2 对环 境无 污染 () 3 增强 了转 向 跟 随性 ( ) 4 改善 了回正特 性 ( ) 5 提高 了操纵 稳定性 ( ) 统结构 简单 。 6系 2 E S系统 总体 设计 P 2 1 P 的设计 总体框 架 E S 汽车在 启动或 发动机运 行 时, 如果 驾驶 员操纵汽 车方 向盘 , 此时在 方向盘 下侧的 扭矩传 感器会产 生 ~个与扭 矩成正 比的 电信号 。此时通 过主控 芯片 的 A 模块来 对其进 行采样 并且对 汽车 的发动 机的信 号 以及 车速 信号进行 采集测 D 量它们的频 率信 号( 设计 中不涉及 ) 同时对驱 动 电路 获取 电机的 电流信 号, 本 , 这 样可 以获得负载 的大 小。然后 通过预 设在 主控芯 片 内的控制 算法对 所获得 的汽 车 信 号进 行 处 理、计 算来 得 到需 给 出 目标的 电流 值 。然后 该值 通 过计 算 公式转 换成对应 的 P M 号 的占空 比值给驱 动芯 片传输 P M W信 W 信号 。 当驱 动 芯片 T3 0 D 4 收到 P M信号后, w 驱动 上 F 臂的两 对 一M S E 管 , 电机提 供 桥 OFT 给
m tr o o .U i g F e s a e s M 9 1 D 1 8 o t o c p a d d i e h p T 3 0 T t c i v ri e i c t F n l y c m l t a o e t e n s n r e e l ’ C S 2 G 2 c n r l hi n r v r c i D 4 S o a h e e d v c r ui . i a l , o p e e a c r p w r s e ri g
电控液压助力转向系统的研究现状和展望

电控液压助力转向系统的研究现状和展望[摘要]:综述电控液压助力转向系统的结构、工作原理及其特点,电控液压助力转向系统能够根据转向需求提供不同的转向助力,既可改善低速时的转向轻便性,又可保证高速时的转向手感。
ehps既可以节省燃油消耗,有利于环保;又能够有效解决转向轻便性与转向灵敏性的矛盾,改善车辆的操纵稳定性,提高驾驶舒适性和安全性。
[关键词]:汽车电控液压助力转向研究现状中图分类号:tn948.2 文献标识码:tn 文章编号:1009-914x(2012)29- 0050 -031引言当今汽车技术的发展追求节能、环保和安全,ehps由于具有节约能源、成本低、便于控制和易于调节等优点,已成为各国汽车界研究的重点。
电控液压助力转向系统不但继承了液压助力转向系统的优点,而且作为向电动助力转向系统过渡的中间产品,起着承前启后的作用,同时也发展了自己的特色。
ehps系统特殊的优点以及它不断增加的市场正使得国内的专家学者以及许多汽车公司对ehps系统产生越来越浓厚的兴趣,已经成为国内车辆技术研究的热点。
2 汽车转向系统的发展汽车转向系统分为机械转向系统和助力转向系统,随着现代汽车技术的快速发展,助力转向系统由传统的液压助力转向系统(hydraulic power steering system,简称hps)向电控液压助力转向系统(electro-hydraulic power steering system,简称ehps)、电动助力转向系统(electric power steering system,简称eps)、线控转向系统(steering by wire system,简称sbw)发展。
机械转向系统由转向操纵机构、转向器和转向传动机械三大部分组成,以驾驶员的体力作为转向能源,其中所有传力件都是机械的,从而增加了驾驶员的疲劳,减小了转向灵敏度,因此机械转向系统很难协调转向轻便性和转向灵敏性之间的矛盾,降低了汽车行驶安全性和舒适性。
汽车电动助力转向(EPS)的研究
汽车电动助力转向(EPS)的研究发表时间:2019-07-01T13:27:12.453Z 来源:《新材料.新装饰》2018年10月下作者:王建坡[导读] 转向系统是汽车的主要子系统之一,近年来,汽车电动助力转向系统(简称为“EPS”)已成为现代汽车中的常规配置,是一种直接依靠电机提供辅助扭矩的动力转向系统。
其性能直接关系到汽车的操纵舒适性和稳定性,对安全行车、减少交通事故、保护驾驶员的人身安全以及改善驾驶员的工作条件起着重要作用。
(长城汽车股份有限公司,河北省汽车工程技术研究中心,河北保定 071000)摘要:转向系统是汽车的主要子系统之一,近年来,汽车电动助力转向系统(简称为“EPS”)已成为现代汽车中的常规配置,是一种直接依靠电机提供辅助扭矩的动力转向系统。
其性能直接关系到汽车的操纵舒适性和稳定性,对安全行车、减少交通事故、保护驾驶员的人身安全以及改善驾驶员的工作条件起着重要作用。
关键词:电动助力转向系统;特点;类型;工作原理;关键技术Vibration mechanism of transmission gear and method of modification, vibration reduction and noise reduction Wang jian poGreat Wall Motor Company,Automotive Engineering Technical Center of HeBei,baoding Abstract:Steering system is one of the main subsystems of automobiles. In recent years, electric power steering system (EPS) has become a conventional configuration in modern automobiles. It is a power steering system that directly relies on motor to provide auxiliary torque. Its performance is directly related to the comfort and stability of vehicle operation, and plays an important role in driving safety, reducing traffic accidents, protecting driver's personal safety and improving driver's working conditions. in Key words:Electric Power Steering System; Characteristics; Types; Working Principle; Key Technologies1电动助力转向系统的特点1.1电动助力转向系统与传统的液压助力转向系统相比具有的优点(1)可降低发动机能耗。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动液压助力转向系统控制算法研究与实现随着近几年汽车行业的发展,汽车的操控性能是越来越受到重视,液压转向系统也开始被广泛应用。
电动液压助力转向系统(EPHS)是新一代汽车液压转向系统,它可以实现汽车的操控性能更优良,更高效,更安全。
由于EPHS具有多种功能,因此研究和实现电动液压助
力转向系统控制算法是一项复杂的工作,也是未来汽车开发的一个重要方向。
本文主要对电动液压助力转向系统控制算法进行研究与实现。
首先,本文针对EPHS系统结构特点,给出了系统控制算法的逻
辑架构。
在建立系统控制算法架构的基础上,针对EPHS的各个功能,提出了动态计算电动液压控制量的算法,并给出了控制量的实时计算公式,以及如何针对不同转向模式进行调整控制量等。
接下来,为了验证电动液压助力转向系统控制算法的有效性,实施了真实车辆仿真实验。
实验在实际道路上进行,实际的道路情况模拟出来,使得实验更加真实和准确。
实验结果表明,EPHS系统控制
算法对实际道路行驶时的操控性能有显著的改善,并且提升汽车的驾驶得分,证明EPHS控制算法计算量准确有效。
最后,本文还对EPHS控制算法的应用前景做出了展望,认为EPHS 控制算法可应用于汽车安全驾驶、汽车自动驾驶、低碳环保等领域,可以大大提高汽车的性能和安全性。
以上就是本文关于电动液压助力转向系统控制算法的研究与实
现的内容。
本文从EPHS系统结构特点,提出了系统控制算法的逻辑
架构,并详细阐述了电动液压转向系统控制算法计算量的动态计算公
式,更从实际车辆仿真实验中证明了EPHS系统控制算法的可行性和有效性,进一步验证了EPHS控制算法在汽车安全驾驶、汽车自动驾驶等领域的应用前景。