基于MATLAB自适应均衡器
用恒模算法进行盲自适应均衡的MATLAB仿真

用恒模算法进行盲自适应均衡的MATLAB仿真一:仿真内容:1:了解盲均衡算法和CMA算法的原理;2:用CMA算法来仿真4QAM信号;二:算法原理:1:盲均衡算法:一般的均衡器需要训练和跟踪两个时期,在训练时期,需要已知信号的一些特性参数来训练均衡滤波器,或直接周期地发送训练序列。
由于训练序列并非含用户的数据,而占用了信道资源,自然会降低信道的利用率。
另外,在跟踪时期,不发送训练序列,若是信道特性是快速转变的,均衡器的性能将迅速恶化。
盲均衡能够不借助训练序列(即咱们通常所说的“盲”,而仅仅利用所接收到的信号序列即可对信道进行均衡。
换言之,其本身完全不用训练序列,就能够够自启动收敛并避免死锁情形,且能使滤波器的输出与要恢复的输入信号相等。
盲均衡从全然上幸免了训练序列的利用,收敛范围大,应用范围广,克服了传统自适应均衡的缺点,从而降低了对信道和信号的要求。
盲均衡的原理框图如下:在上图中,x(n)为系统的发送序列,h(n)为离散时刻传输信道的冲激响应,其依据所用调制方式的不同,能够是实值,也能够是复值;n(n)为信道中叠加的高斯噪声;y(n)为通过信道传输后的接收序列,同时也是均衡器的输入序列;w(n)为盲均衡器的冲激响应,盲均衡器一样采纳有限长横向滤波器,其长度为L;x为盲均衡器的输出信号,也即通过均衡后的恢复序列。
)(~n且有下式成立:y(n)=h(n)*x(n)+n(n);x=w(n)*y(n)=w(n)*h(n)*x(n);(~n)2:Bussgang算法Bussgang类盲均衡算法作为盲均衡算法的一个分支,是在原先需要训练序列的传统自适应均衡算法基础上进展起来的。
初期的盲均衡器以横向滤波器为大体结构,利用信号的物理特点选择适合的代价函数和误差操纵函数来调剂均衡器的权系数。
这种算法是以一种迭代方式进行盲均衡,并在均衡器的输出端对数据进行非线性变换,当算法以平均值达到收敛时,被均衡的序列表现为Bussgang 统计量。
Matlab中的自适应滤波和自适应控制技术

Matlab中的自适应滤波和自适应控制技术在科学和工程领域,信号处理和控制是两项至关重要的技术。
自适应滤波和自适应控制技术是其中两个重要的分支,它们可以帮助我们解决各种实际问题。
而Matlab作为一种广泛应用于科学和工程领域的计算软件,提供了丰富的工具和函数来支持自适应滤波和自适应控制的实现。
自适应滤波是一种能够根据输入信号的特点自动调整滤波器参数的滤波技术。
在实际应用中,信号可能会受到噪声、失真或其他干扰的影响,自适应滤波的目标就是通过调整滤波器参数,使得输出信号尽可能地接近于预期信号,从而提高信号的质量。
Matlab中提供了各种自适应滤波器算法的函数,如最小均方(LMS)算法、最小二乘(RLS)算法等。
其中,最常用的是LMS算法,它是一种迭代算法,通过不断调整滤波器权值来逼近最优解。
在Matlab中,我们可以使用`adaptfilt.lms`函数来实现LMS算法的自适应滤波。
以降噪为例,假设我们有一段含有噪声的语音信号,我们希望通过自适应滤波器来消除噪声。
首先,我们需要定义一个适当的滤波器结构,例如一个带有反馈的自适应滤波器。
然后,使用`adaptfilt.lms`函数来训练滤波器,并将含噪声的语音信号输入滤波器中,得到去噪后的语音信号。
除了自适应滤波,Matlab还提供了丰富的自适应控制技术,用于控制系统中对系统参数或控制策略进行自适应调整的任务。
自适应控制可以提高系统的鲁棒性和适应性,使得控制系统能够在面对不确定性和变化的环境中保持良好的性能。
在Matlab中,可以通过`adaptfilt`库中的函数来实现自适应控制。
例如,我们可以使用自适应最小二乘(RLS)算法来训练控制器的权值,以实现自适应控制。
相比于LMS算法,RLS算法对参数的估计更加准确,但计算复杂度更高。
自适应控制的应用场景广泛,可以用于控制系统中的参数估计、反馈补偿、自适应滑模控制等。
例如,我们可以使用自适应控制来实现自动驾驶汽车中的路径跟踪功能,通过不断调整控制器的参数,使得汽车能够自动沿着预设的路径行驶。
自适应均衡RLS算法
杨洲良2012201261自适应均衡LMS 算法利用自适应均衡器补偿未知时变信道的特性,需要采用有效的算法跟踪信道特性变化来更新均衡器的加权系数。
适合自适应均衡器的算法有很多。
我们主要对LMS 算法的原理加以分析。
1、基于LMS 的自适应均衡算法LMS 算法所采用的准则是最小均方误差准则,起代价函数为:()()()22ˆ[]J E e n E d n x n ⎡⎤==-⎣⎦这里,()d n 是在第n 个新号传输间隔发送的信息符号,()ˆxn 是均衡器输出端对该符号的估计值。
利用梯度下降法,可以得到权向量的迭代公式:()()()()*12c n c n e n y n μ+=+式中,()c n 是均衡器抽头加权矢量,()y n 是均衡器的输入序列,μ是收敛因子,且有max 01/μλ<<,max λ是均衡器输入矢量自相关矩阵统计平均所得矩阵的最大特征值。
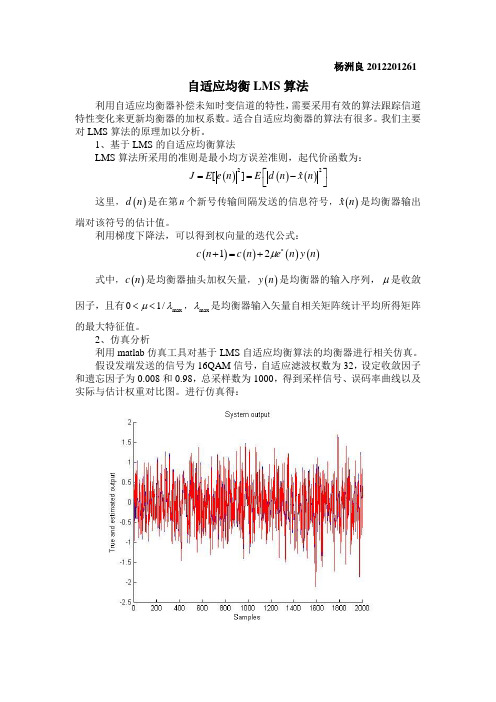
2、仿真分析利用matlab 仿真工具对基于LMS 自适应均衡算法的均衡器进行相关仿真。
假设发端发送的信号为16QAM 信号,自适应滤波权数为32,设定收敛因子和遗忘因子为0.008和0.98,总采样数为1000,得到采样信号、误码率曲线以及实际与估计权重对比图。
进行仿真得:附(代码):%channel system order sysorder = 5 ;% Number of system points N=2000;inp = randn(N,1);n = randn(N,1);[b,a] = butter(2,0.25);Gz = tf(b,a,-1);%This function is submitted to make inverse Z-transform (Matlab central file exchange)%The first sysorder weight value%h=ldiv(b,a,sysorder)';% if you use ldiv this will give h :filter weights to beh= [0.0976; 0.2873; 0.3360; 0.2210; 0.0964;];y = lsim(Gz,inp);%add some noisen = n * std(y)/(10*std(n));d = y + n;totallength=size(d,1);%Take 60 points for trainingN=60 ;%begin of algorithmw = zeros ( sysorder , 1 ) ;for n = sysorder : Nu = inp(n:-1:n-sysorder+1) ;y(n)= w' * u;e(n) = d(n) - y(n) ;% Start with big mu for speeding the convergence then slow down to reach the correct weightsif n < 20mu=0.32;elsemu=0.15;endw = w + mu * u * e(n) ;end%check of resultsfor n = N+1 : totallengthu = inp(n:-1:n-sysorder+1) ;y(n) = w' * u ;e(n) = d(n) - y(n) ;endhold onplot(d)plot(y,'r');title('System output') ;xlabel('Samples')ylabel('True and estimated output')figuresemilogy((abs(e))) ;title('Error curve') ;xlabel('Samples')ylabel('Error value')figureplot(h, 'k+')hold onplot(w, 'r*')legend('Actual weights','Estimated weights')title('Comparison of the actual weights and the estimated weights') ; axis([0 6 0.05 0.35])。
基于LMS算法的自适应均衡器的分析

1引言自适应滤波处理技术可以用来检测平稳和非平稳的随机信号,具有很强的自学习和自跟踪能力,算法简单易于实现,在噪声干扰抵消、线性预测编码通信系统中的自适应均衡、未知系统的自适应参数辨识等方面获得了广泛的应用。
Widrow和Hoff于1960年提出最小均方算法(leastmeansquare,LMS),其显著特点是它的简单性。
基于LMS算法自适应均衡器系统框图见(图1)。
随机数发生器1产生用来探测信道的测试信号,而随机数发生器2用来干扰信道输出的白噪声源。
这两个随机数发生器是彼此独立的。
自适应均衡器用来纠正存在加性白噪声的信道的畸变。
经过适当延迟,随机数发生器l也提供用做训练序列的自适应均衡器的期望响应。
加到信道输入的随机序列{x}由伯努利(Bernoulli)序列组成,=+1或-1,随机变量具有零均值和单位方差。
信道的脉冲响应用升余弦表示为:——(式1)其中,参数W控制均衡器抽头输入的相关矩阵的特征值分布x(R),并且特征值分布随着W的增大而扩大。
随机数发生器2产生的序列具有零均值,方差为=0.001。
均衡器具有M=11个抽头。
由于信道的脉冲响应h关于n=2时对称,那么均衡器的最优抽头权值在n=5时对称。
因此,信道的输入x被延时了=2+5=7个样值,以便提供均衡器的期望响应。
通过选择匹配横向均衡器中点的合适延时,LMS算法能够提供信道响应的最小相位分量和非最小相位分量之逆。
2基于LMS算法的自适应均衡器的特性分析基于LMS算法的自适应均衡器中,11个抽头均衡器相关矩阵R的特征值。
在时刻n,均衡器第一个抽头输入为:——(式2)其中所有参数均为实数。
因此,均衡器输入的11个抽头u(n)、u(n-1)、…、u(n-10)相关矩阵R是一个对称的11×11矩阵。
此外,因为其脉冲响应h仅当n=1,2,3时是非零的,且噪声过程是零均值、方差为的白噪声,因此相关矩阵R是主对角线的,即矩阵R在主对角线及其上下紧密相邻的两条(分居两侧,共4条)对角线上的元素是非零的。
基于MATLAB的数字均衡器的设计

2008年8月第25卷第8期Aug.2008Vo1.25No.8湖北第二师范学院学报Journal of Hubei University of Education随着数字化技术的快速、深入发展,人们对数字化电子产品所产生的图像、图形以及声音等质量的要求越来越高。
在实时数字处理过程中,与D /A 和A /D 转换相关的模拟信号重构过程是决定数字系统输出质量的关键。
在声音的拾取过程及通过音响设备的传送过程中,由于设备或器件的原因,其幅度对频率的响应往往不一致,这样就达不到原来的听觉效果,而均衡器就是一个改变放大器频率响应的设备。
现有的许多播放器都具有均衡器的功能,如Winamp 等。
MATLAB 是一个数据分析和处理功能十分强大的工程实用软件,它的滤波器设计工具箱为实现声音信号的数字滤波提供了十分方便的函数和命令,但MAT -LAB 的计算速度慢。
Visual C ++是Windows 平台下主要的应用程序开发环境之一,它能方便实现软件开发,开发的系统具有执行速度快等优点,故MATLAB 与VC 的混合编程正好结合了MATLAB 强大的工具箱与VC 很快的执行速度。
本文结合两者的优势,基于MATLAB 与VC 混合编程的方法设计出一种实用的数字均衡器。
1设计原理均衡器的基本功能是调节各频段的信号强弱,为了满足该功能,应当具备下面一些基本功能:WAV 声音信号获取,即从文件(*.wav ,*.au 等)读取音频信息;八段数字均衡器设定;滤波,包括生成低通、高通、带通、带阻的巴特沃斯、切比雪夫滤波器,并显示滤波器的频率特征曲线;保存,保存滤波后的音频信息到文件;播放,播放滤后音频信号并实时显示波形及频谱特性。
针对这些要求,本文采用如下的方法:(1)设计出对应八个频段的八个带通滤波器;(2)对原始信号分八路用八个带通滤波器进行滤波;(3)将八个滤波器的滤波结果加权求和,权值的设计与均衡器的调节要求一致。
基于MATLAB的通信系统调制和解调实例分析
基于MATLAB的通信系统调制和解调实例分析作者:孙杰来源:《数字化用户》2014年第01期【摘要】通信是通过某种媒体进行的信息传递,目的是传输信息,通信系统是用以完成信息传输过程的技术系统的总称,作用是将信息从信源发送到一个或多个目的地。
调制与解调在信息的传输过程中占据着重要的地位,是不可或缺的,因此研究系统的调制和解调过程就极为重要。
MATLAB是集数值计算、图形绘制、图像处理及系统仿真等强大功能于一体的科学计算语言,它强大的矩阵运算和图形可视化的功能以及丰富的工具箱,为通信系统的调制和解调过程的分析提供了极大的方便。
【关键词】通信系统调制与解调 MATLAB一、用MATLAB分析双边带幅度调制(DSM-AM)我们可以利用 MATLAB 强大的符号运算功能来进行运算,再根据MATLAB的可视化结果进行分析。
在DSB-AM中,已调信号的时域表示为:u(t)=m(t)c(t)=Acm(t)式中,m(t)是消息信号,c(t)=Ac 为载波,fc是载波的频率(单位:HZ),是初始相位。
为了讨论方便取初相=0(以下类似)。
随u(t)作傅里叶变换,即可得到信号的频域表示:U (f)=Ac/2M(f-fc)+Ac/2M(f+fc)。
传输带宽Bt是消息信号带宽W的两倍,即:Bt=2W。
某消息信号用信号m(t)以DSB-AM方式调制载波c(t)=cos(2∏fct),所得到的已调制信号记为u(t).设t。
=0.15s,fc=250Hz。
试比较消息信号与已调信号,并绘制它们的频谱。
运用如下MATLAB程序:t0=0.15;%信号持续时间ts=0.001;%采样时间间隔Fc=250;%载波频率FS=1/ts;%采样频率df= 0.3;%频率分辨率t=[0:ts:t0];%时间矢量m=[ones(1,t0/(3*ts)), -2*ones(1,t0/(3*ts)),zeros(1,t0/(3*ts)+1)];%定义信号序列C=cos(2*pi*Fc.*t);%载波信号u=m.*c;%调制信号[M,m,df1]=fft_seq(m,ts,df);%傅里叶变换M=M/FS;[U,u,df1]=fft_seq(m,ts,df);U=U/FS;[C,c,df1]=fft_seq(c,ts,df);f=[0:df1:df1*(length(m)-1)]-Fs/2; %频率矢量subplot(2,2,1);plot(t,m(1:length(t)));%未调制信号title(‘未调制信号‘);subplot(2,2,2);plot(t,u(1:length(t)));%已调制信号title(‘已调制信号‘);subplot(2,2,3);plot(f,abs(fftshift(M))); %未调制信号频谱title(‘未调制信号频谱‘);subplot(2,2,4);plot(f,abs(fftshift(U))); %已调制信号频谱title(‘已调制信号频谱‘);傅里叶变换函数fft_seq,源代码如下:function[M,m,df]=fft_seq(m,ts,df)%[M,m,df]=fft_seq(m,ts,df)%[M,m,df]=fft_seq(m,ts)%M为输入序列m的傅里叶变换,ts为抽样间隔,输入df为频率分辨率%输出序列m按要求的频率分辨率df进行补零后的序列%输出df为最终的频率分辨率fs=1/ts;if nargin==2,n1=0;else, n1=fs/df;endn2=length(m);n=2^(max(nextpow2(n1),nexpow2(n2)));M=fft(m,n);m=[m,zeros(n-n2)];df=fs/n;运行后得到的信号和调制信号如图所示:二、用 MATLAB 分析相干解调过程例用信号m(t)以DSB-AM方式调制载波c(t)=cos(2∏fct),所得到的已调制信号记为u(t).设t0=0.15s,fc=250Hz。
基于MATLAB的数字滤波器-均衡器的设计
目录1.引言 (2)2.同类产品的比较 (2)3.设计原理 (3)3.1滤波器的设计 (3)3.2均衡器的设计 (4)4.具体设计步骤 (5)4.1界面设计 (5)4.2.程序设计 (7)4.2.1滤波函数 (7)4.2.2均衡器 (8)5.误差分析 (11)6.总结 (11)7.心得与建议 (11)8.参考文献: (12)1.引言均衡器(Equalizer、EQ,港台地区叫做等化器),是一种可以分别调节各种频率成分电信号放大量的电子设备,通过对各种不同频率的电信号的调节来补偿扬声器和声场的缺陷,补偿和修饰各种声源及其它特殊作用,一般调音台上的均衡器仅能对高频、中频、低频三段频率电信号分别进行调节。
均衡器分为三类:图示均衡器,参量均衡器和房间均衡器。
]1[运用数字滤波器组成的均衡器称为数字均衡器,数字均衡器即可作成图示EQ,有可做成参量EQ,还可以做成两者兼有的EQ,它不仅各项性能指标优异,操作方便,而且还可同时储存多种用途的频响均衡特性,供不同节目要求选用,可多至储存99种频响特性曲线。
]2[现在市面上的数字均衡器种类繁多,根据所要使用的场合不同,均衡器的参数设置和具体功能也不尽相同。
本项目的均衡器的设计主要基于MATLAB的图形用户界面和后台程序开发。
所设计出来的仪器功能非常简单,操作也比较容易。
2.同类产品的比较几乎每个人的电脑上都有千千静听这个软件,在其播放界面上就附有十段数字均衡器,可供用户调节。
界面如图所示:图2.1 千千静听均衡器界面3.项目综述按照老师的要求,本文需要完成八段数字均衡器的设计,以达到对声音信号的处理效果。
具体实施中,我利用的是MATLAB这个软件来实现的。
MATLAB 是一个数据分析和处理功能十分强大的工程实用软件,他的滤波器设计工具箱为实现声音信号的数字滤波提供了十分方便的函数和命令。
但它也有明显的缺点,就是运算速度比较慢。
当所要处理的声音信号比较复杂时,其滤波过程往往要耗一小段时间,有事甚至会达到一秒多。
基于MATLAB的数字均衡器的设计
滤波 器 2 软件 设计
均 衡 器 的基 本 功 能 是 调节 各 频 段 的信 号强 弱 , 为
了满足该 功能 , 应当具备下 面一 些基本 功能 : V声音 WA
() 八 个滤 波器 的滤波 结果 加权 求 和 , 3将 权值 的设
计 与均衡器 的调 节要求 一致 。
这样最 终得 到 的结果便 是所需要 的均衡 结果 。 中 其 第 2步 中各带通 滤波 器 的输 入信号均 为原始 信号 . 而不 是“ 串联 ” 滤 波 。 地 设原 始输 入 信号 为 x n , i 的输 ()第 路 出信 号为 y , , i 的权值 为 k, iz 第 路 () 均衡 器 的输 出信 号
工 程实 用软 件 ,它 的滤波 器设计 工具 箱 为实 现 声音 信
∑k Y
酉
() 1
( = ) n+ , 一) . , 1 (一 ) n b( ( 6 ) 1 ) 1 _ ( ) n Ⅳ + . Ⅳ+ x b
一
a () 一 ) …一 1 y 1 2 一 a( ) Ⅳ+ y 一Ⅳ )
性 。 对这些要 求 , 文采用如 下 的方 法 : 针 本 () 1 设计 出对应八个 频段 的八个带 通 滤波器 :
M TA A L B提供 的 G I E工具 为 可视 化 编程 工具 , UD 使得 软件 的界 面设计像 VB一样方 便 。 了实 现 预期 的 为
肖正 安
( 湖北 第二师 范学 院 物理 与 电子 工程 系,武汉 4 00 ) 3 2 5
摘要 : 通过 Ma a t b强大 的信 号仿真 功 能 , l 结合 VC混合 编程 , 析数 字均 衡 器 的设计要 求 , 各种数 字音 频 分 对
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、设计主体:
1 、设计原理 数字信号经过这样的信道传输以后,由于受到了信道的非理想特性的影响,
在接收端就会产生码间干扰(ISI),使系统误码率上升,严重情况下使系统无法继续 正常工作。理论和实践证明,在接收系统中插入一种滤波器,可以校正和补偿系 统特性,减少码间干扰的影响。这种起补偿作用的滤波器称为均衡器。
时域均衡是利用均衡器产生的时间波形去直接校正已畸变的波形,使包括均 衡器在内的整个系统的冲击响应满无码间串扰条件。频域均衡是从校正系统频率 特性出发,使包括均衡器的基带系统的总特性满足无失真传输条件;频域均衡在 信道特性不变,且在传输低速数据时是适用的。而时域均衡可以根据信道特性的 变化进行调整,能够有效地减小码间串扰,故在高速数据传输中得以广泛应用。
设一个具有 2N+1 个抽头的横向滤波器,如图 3(a)所示,其单位冲激响应
为 et,则有
N
e(t) Ci (t iTS ) i N
有设它的输入为 x(t) , 是被均衡的对象,并设它没有附加噪声,如图 3(b)
所示,则均衡后输出波形 yt 为
N
y(t) x(t) e(t) Ci x(t iTS ) i N
从上式中可以看出,滤波器抽头系数矢量的更新迭代与 rxd 和 Rxx 有关,而实际
的信号处理过程中, rxd 和 Rxx 都不是能够先验知道的,因此通常用梯度的估计值
J
n
1
来代替
J
n
1
.
J
n
2
xnd
n
xn
H
xnwn
可得
wn wn 1 n xnd n X nH xnwn
-0.0348 0.0095 Columns 10 through 18 0.0422 0.0321 0.0236 0.0126 -0.0068 -0.0310 0.0094
0.0207 -0.0136 Columns 19 through 27 0.0354 0.0016 -0.0281 0.0181 0.0014 0.0073 -0.0104
1. 课题要求系统学习时域均衡原理,掌握理论知识; 2. 首先进行时域均衡原理和算法设计,再在所用的仿真软件 Matlab 上对 设计进行仿真分析,最后写实验报告; 3. 对整个系统设计进行回顾,总结心得。
三、设计报告的内容
1. 设计题目与设计任务(设计任务书) 2. 前言(绪论)(设计的目的、意义等) 3. 设计主体(各部分设计内容、分析、结论等) 4. 结束语(设计的收获、体会等) 5. 参考资料
步骤 2 :当 n=n+1 时
计算滤波器输出 yn wH xn , 计算误差函数 en d n yn, 更新滤波器抽头系数矢量 wn wn 1 ne nxn,
关于上面的 LMS 算法有以下几点注释:
注释 l :若取 n 常数,则称为基本 LMS 算法。
四、设计时间与安排
1、设计时间:
3周
2、设计时间安排:
熟悉实验设备、收集资料: 4 天
设计图纸、实验、计算、程序编写调试: 7 天
编写课程设计报告: 3 天
答辩: 1 天
基于 Matlab 的自适应ຫໍສະໝຸດ 衡器设计一、 设计目的及意义:
通过本学期通信原理课程的学习,主要对数字信号系统的通信原理、传输机 制等有了系统深入的了解。而实践性的课程设计能够起到提高综合运用能力,加 强理论知识的学习,提高实验技术,启发创造新思想的效果。
电子信息系 综合课程设计
基于 Matlab 的自适应均衡器设计
专业名称 班级学号 学生姓名 指导教师 设计时间
通信工程 2010.12.20~2011.1.7
课程设计任务书
专业: 学号: 学生姓名(签名):
设计题目:基于 Matlab 的自适应均衡器设计
一、设计实验条件
实验室,Matlab 软件
二、设计任务及要求
LMS(Least Mean Square)算法最早由 Widrow 于 1960 年建立。采用最小均 方算法的均衡器比迫零算法均衡器要稳定一些,它所采用的准则是使均衡器的期 望输出值和实际输出值之间的均方误差(MSE)最小化的准则。由 Wiener 滤波理论 可知,滤波器的最优抽头系数矢量可表示为
图 1 数字基带传输系统
在实际中,当数字基带传输系统(如图 1)的特性 H () GT C()GR 不
满足奈奎斯特第一准则时,就会产生有码间串扰的响应波形。现在我们来证明:
如果在接收滤波器和抽样判决之间插入一个称之为横向滤波器的可调滤波器,其
冲激响应为
hT (t) Cn (t nTS ) n
Wopt Rxx1rxd
式中 Rxx 是输入信号矢量 xn的互相关函数, rxd 是输入信号矢量xn 与期望信号矢 量 d n的互相关函数。直接求解式此式的运算量非常大,尤其当滤波器的抽头系
数个数比较多时。 考虑如图 4 所示的自适应 FIR 滤波器:
图 4 自适应 FIR 滤波器
注释 2
:若取 n
x
a
H nxn
,
其中a
(0,2),
0, 则的到归一化 LMS 算法。
注释 3 :在功率归一化算法中,取
n
a
2
x
n
,
其中
2 x
表示xn
的方差,
可由
2 x
2 x
n
1
e
2
n
递推计算,这里
(0,1) 为遗忘因子,由 0<a< 2 确定,而 M 是滤波器阶数. M
Jn 2Exnd n X H wn
2rxd 2Rxxwn
最广泛使用的自适应算法形式为“下降算法”:
wn wn 1 nvn
式中 wn是第 n 步迭代的系数矢量,n是第 n 步迭代的更新步长,而 v(n)是第
n 步迭代的更新方向矢量。
其中,
Cn
TS 2
TS
TS
TS
e jnTs d
H ( nTS )
i
Cn 完全依赖于 H(ω),那么,理论上就可消除抽样时刻上的码间串扰。
由 上式可以看出,这里的 hT t 是图 2 所示网络的单位冲激响应。该网络是有
无限多的按横向排列的迟延单元Ts 和抽头加权系数 组成的,因此成为横向滤波
y1=y(n+M-1:-1:n-M-1); d1=wk*y1'; e(n)=x(n)-d1; wk=wk+u*e(n)*y1; e(n)=10*log10(abs(e(n))); endq error=error+e; end 4.得到横向滤波器系数 wk 输出结果:wk =
Columns 1 through 9 -0.0058 0.0297 0.0283 0.0247 -0.0147 -0.0118 0.0385
定义梯度矢量为
J ndef 0 J n, 1J n,....,M 1J nT
以及输入矢量和抽头系数矢量: xn xnxn 1.....xn M 1T wn w0 nw1n.....wM 1nT
则此式可以写作以下矢量形式:
图 3 有限长横向滤波器及其输入和输出波形
理论上,无限长的横向滤波器可以完全消除抽样时刻上的码间串扰,但实际
中是不可能实现的。因为,不仅均衡器的长度受限制,并且系数 的调整准确度
也受到限制。如果 的调整准确度可不到保证,即使增加长度也不不会获得显著 的效果。因此,有必要进一步讨论有限长横向滤波器的抽头增益调整问题。
wn 1 ne nxn
其中 en d n yn为滤波器输出与期望信号的误差函数。上式就是 LMS 算法抽
头系数的更新公式,容易验证。
J
n是J
n
的无偏估计,
通过上面的讨论可以总结出 LMS 算法的具体步骤如下:
步骤 l :初始化抽头系数矢量 wn 0,0....T , n 0 ;
器。它的功能是利用它产生的无限多个响应波形之和,将接收滤波器输出端抽样
时刻上有码间串扰的响应波形变换成抽样时刻上无码间串扰的响应波形。由于很
想滤波器的均衡原理是建立在响应波形上的,故把这种均衡成为时域均衡。
图 2 横向滤波器
不难看出,横向滤波器的特性将取决于各抽头系数 。如果 是可调整的, 则图 3 所示的滤波器是通用的;特别是当 可自动调整时,则它能够适应信道特 性的变化,可以动态校正系统的事件响应。
令
en dn yn dnW H X n
表示滤波器在 n 时刻的误差,并定义均方误差
J nde
E en 2
E
d
n
W
H
xn
2
为代价函数。
由梯度的定义可以得出,代价函数相对于滤波器抽头系数矢量 w 梯度为
k J n 2 E x n k e n 2Exn k dnW H xn ,k 0,1,...,M 1
-0.0574 0.0115 Columns 46 through 54 0.0346 -0.0578 0.0389 -0.0503 -0.0110 0.0133 0.0500
注释 4
:当期望信号未知时,步骤
2
中的
d(n)可直接用判决器的实际输出