第2讲、有限元与弹性力学的基本原理
合集下载
有限元课件-第2讲-矩阵分析及弹性力学基础

有限元的离散化过程
总结词
离散化是有限元方法的核心步骤之一,它涉及到将连 续的物理系统划分为有限个离散的单元。离散化的精 度和单元类型的选择对求解结果的精度和计算效率有 很大的影响。
详细描述
离散化的过程通常需要根据所处理的问题和所用的数 学模型来确定。在离散化过程中,需要将连续的求解 区域划分为有限个小的单元,每个单元可以有不同的 形状和大小。同时,还需要确定每个单元的节点和边 界条件,以便建立整个系统的方程组。离散化的精度 越高,求解结果的精度就越高,但计算量也会相应增 大。因此,需要在精度和计算效率之间进行权衡。
过程求解。
LU分解
LU分解是将一个矩阵分解为一个 下三角矩阵和一个上三角矩阵的乘 积。
迭代法
迭代法是一种求解线性代数方程组 的方法,通过不断迭代逼近解。
弹性力学中的基本矩阵
弹性矩阵
弹性矩阵是表示弹性力学中应 力与应变之间关系的矩阵。
刚度矩阵
刚度矩阵是表示结构刚度的矩 阵,用于有限元分析中。
质量矩阵
02
矩阵分析基础
矩阵的定义与运算
矩阵的定义
矩阵是一个由数字ቤተ መጻሕፍቲ ባይዱ成 的矩形阵列,表示为矩 形阵列的括号中的数字
。
矩阵的加法
矩阵的加法是将两个矩 阵的对应元素相加。
矩阵的数乘
数乘是指一个数与矩阵 中的每个元素相乘。
矩阵的乘法
矩阵的乘法仅适用于满 足特定条件的两个矩阵
。
线性代数方程组的求解
高斯消元法
高斯消元法是一种求解线性代数 方程组的方法,通过消元和回代
平衡方程
描述了物体在受力平衡状 态下的应力分布。
几何方程
描述了物体在受力后产生 的应变。
有限元 第2讲 有限元法基本理论
•根据问题性质,忽略部分暂时不必考虑的因素,提出一 些基本假设。使问题的研究限定在一个可行的范围。
•基本假设是学科的研究基础。 •超出基本假设的研究领域是固体力学其它学科的研究。
© BIPT
弹性力学的基本假设 1. 连续性假设
•——假设所研究的整个弹性体内部完全由组成物体的 介质所充满,各个质点之间不存在任何空隙。
第2章 有限元法基本理论
张 洪 伟
© BIPT
内容提要
1
弹性力学问题基本描述
弹性问题参量原理
2
3 4
有限元分析基本步骤
有限元解的误差分析
© BIPT
弹性力学问题的基本描述
基本假设的必要性 •工程问题的复杂性是诸多方面因素组成的。如果不分主 次考虑所有因素,则问题的复杂,数学推导的困难,将 使得问题无法求解。
© BIPT
弹性力学的基本假设
5. 小变形假设
——假设在外力或者其他外界因素(如温度等)的影响下, 物体的变形与物体自身几何尺寸相比属于高阶小量。
——在弹性体的平衡等问题讨论时,可以不考虑因变形所 引起的尺寸变化。 ——忽略位移、应变和应力等分量的高阶小量,使基本方 程成为线性的偏微分方程组。
© BIPT
© BIPT
弹性力学的基本假设
4. 完全弹性假设
•——对应一定的温度,如果应力和应变之间存在一一对 应关系,而且这个关系和时间无关,也和变形历史无关, 称为完全弹性材料。 •完全弹性分为线性和非线性弹性,弹性力学研究限于线 性的应力与应变关系。 •研究对象的材料弹性常数不随应力或应变的变化而改变。
符号规定:
应力的概念
图示单元体面的法线为y,称为y面,应力 分量垂直于单元体面的应力称为正应力。 正应力记为 y ,沿y轴的正向为正,其下
9第2章弹性力学平面问题及空间问题有限元
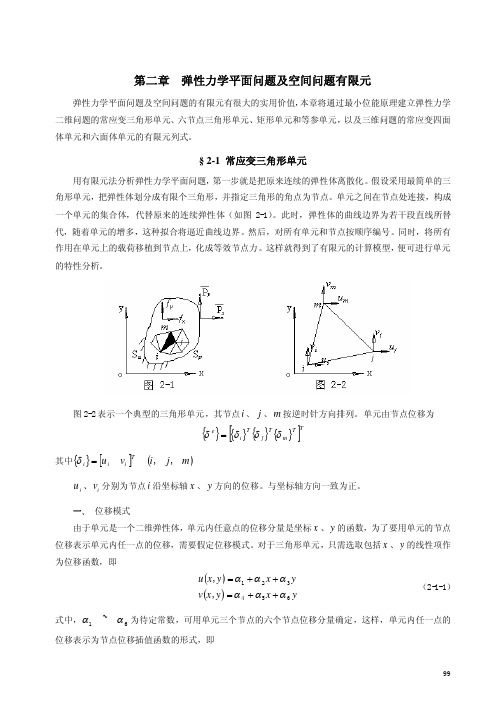
v u v 2 , y 6 , xy 3 5 都是常量,即线性位移模式反映 x y y x
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
第2章_弹性力学基础及有限元法的基本原理1
W U
当外力的形式是多样的时,外力的虚功等于:
W f Pc f Pv dV f Ps dS
T T T v s
• 1.4 平面问题定义
严格地讲,任何结构都是空间的。对于某些特殊情 况,空间问题可以转化为平面问题。
(1)平面应力问题 满足条件: 1)几何条件 厚度尺寸远远小于截面尺寸; 2)载荷条件 载荷平行于板平面且沿厚度方向均匀 分布,而板平面不受任何外力作用。
1)位移函数 分片插值→ 假设一种函数来表示单元位移分布 一般选取多项式(简单而且易求导)
可用于离散的单元: • 三角形单元; • 矩形单元; • 不规则四边形单元。 DOF 节点的自由度:节点所具有的位移分量的数量。 一个单元所有节点的自由度总和称为单元自由度。 (1)单元参数只能通过节点传递到相邻单元 (2)单元和节点必须统一编号
2.2 单元分析(位移、应力、应变) 任务:形成单元刚度矩阵,建立单元特性方程 因此必须建立坐标系,如下图:
1D问题的弹性模量
E杨氏弹性模量
泊松比是指材料在单向受拉或受压时,横向正应变与轴向 正应变的绝对值的比值,也叫横向变形系数,它是反映材 料横向变形的弹性常数。 若在弹性范围内加载,横向应变εx与纵向应变εy之间存 在下列关系: εx=- νεy 式中ν为材料的一个弹性常数,称为泊松比。泊松比是 量纲为一的量。 可以这样记忆:空气的泊松比为0,45#钢0.3,水的泊松 比为0.5,中间的可以推出。
• 未知数 应力 6个+应变 6个+位移 3个=15个 • 方程个数 平衡方程 3个+几何方程6个+物理方程6个=15个 原则上可以根据15个方程求出15个未知物理量 但实际求解时先求出一部分再通过方程求解剩下的。 目前有限元法主要采用的是位移法,以三个位移 分量为基本未知量。位移-应变-应力,应力和外力平衡
弹性力学与有限元完整版ppt课件

E 1 2 ,
. 1
平面应变
• 4 变形协调方程
平面应力
平面应变
调和方程
由6个简化为1个
平面问题
方程数量: 平衡方程——2个 物理方程——3个 几何方程——3个
合计 8
未知量:
应力分量——3个 x、 y、 xy
应变分量——3个
x、 y z、 xy
位移分量——2个
u、v
合计 8
第三章 弹性力学问题求解方法简述
• 研究的内容:
– 外力作用下
应力、应变、位移
• 物体变形——弹性变形、塑性变形
• 弹性变形:
– 当外力撤去以后恢复到原始状态,没有变形残留,材 料的应力和应变之间具有一一对应的关系。与时间无 关,也与变形历史无关。
• 塑性变形:
– 当外力撤去以后尚残留部分变形量,不能恢复到原始 状态,——即存在永久变形。应力和应变之间的关系 不再一一对应,与时间、与加载历程有关。
1.3 几个基本概念
1. 外力 2. 一点的应力状态 3. 一点的形变 4. 位移分量
1 外力
• 作用于物体的外力可以分为3种类型: 体力、面力、集中力。
• 体力——就是分布在物体整个体积内部各个质点上的
力,又称为质量力。例如物体的重力,惯性力,电磁力等 等。
• 面力——是分布在物体表面上的力,例如风力,静水
大小和方向不同。
• 体力分量:将体力沿三个坐标轴xyz 分解,用X、
Y、Z表示,称为体力分量。
• 符号规定:与坐标轴方向一致为正,反之为
负。 应该注意的是:在弹性力学中,体力是指单位
体积的力 。
• 体力的因次:[力]/[长度]^3
• 表示:F={X Y Z}
. 1
平面应变
• 4 变形协调方程
平面应力
平面应变
调和方程
由6个简化为1个
平面问题
方程数量: 平衡方程——2个 物理方程——3个 几何方程——3个
合计 8
未知量:
应力分量——3个 x、 y、 xy
应变分量——3个
x、 y z、 xy
位移分量——2个
u、v
合计 8
第三章 弹性力学问题求解方法简述
• 研究的内容:
– 外力作用下
应力、应变、位移
• 物体变形——弹性变形、塑性变形
• 弹性变形:
– 当外力撤去以后恢复到原始状态,没有变形残留,材 料的应力和应变之间具有一一对应的关系。与时间无 关,也与变形历史无关。
• 塑性变形:
– 当外力撤去以后尚残留部分变形量,不能恢复到原始 状态,——即存在永久变形。应力和应变之间的关系 不再一一对应,与时间、与加载历程有关。
1.3 几个基本概念
1. 外力 2. 一点的应力状态 3. 一点的形变 4. 位移分量
1 外力
• 作用于物体的外力可以分为3种类型: 体力、面力、集中力。
• 体力——就是分布在物体整个体积内部各个质点上的
力,又称为质量力。例如物体的重力,惯性力,电磁力等 等。
• 面力——是分布在物体表面上的力,例如风力,静水
大小和方向不同。
• 体力分量:将体力沿三个坐标轴xyz 分解,用X、
Y、Z表示,称为体力分量。
• 符号规定:与坐标轴方向一致为正,反之为
负。 应该注意的是:在弹性力学中,体力是指单位
体积的力 。
• 体力的因次:[力]/[长度]^3
• 表示:F={X Y Z}
弹塑性力学与有限元:2 力学位移和应变分析T

O
x u u dx
x
u
u x
dx
u
dx
u x
PB的正应变:
u
P
dx
v P A
dy
x v v dx
x
y
v
v y
dy
dy
v
v y
P点的剪应变:
y
v v dy y
B
A
B
u u dy
P点两直角线v 段夹v角d的x 变 v化
tan
x dx u dx
xy
v x
u x
u
u
x dy
u
tan
y dy v dy
符号规定:u,v,w与坐标轴正方向一致为正,相反为负。
考虑外力作用下的两种状态: 平衡状态:M点只随位置变化,不随时间变化;位移分量(u,v,w)只随位置变化, 不随时间变化。 运动状态: M点不仅随位置变化,而且随时间变化;位移分量(u,v,w)随位置和 时间变化而变化。
本章仅考虑平衡状态。
根据连续性假设,物体上任一点M,当物体变形后, 都一一对应于相应的点M’;
考察P点邻域内线段的变形:
PA dx dy
y
u
P
dx
x u u dx x
v P A
dy
v v dx x
B
A
变形前 P
A
变形后
P
u v
v v dy y
B
u u dy y
u u dx x
A v v dx B
x
u u dy
B
y v v dy
y
注:这里略去了二阶以上高阶无穷小量。
PA的正应变:
第2章 弹性力学的基本知识

(2)均匀性假设:假定物体内各点处材料均相同。
(3)各向同性假设:假定物体内各点处各个方向上的物理性质相同。
(4)完全弹性假设:胡可定律
(5)几何假设——小变形假设: 变形产生的位移与物体的尺 寸相比 ,是微小的。
关于外力、应力、应变和位移的定义
1.外力
体力 (定义)分布在物体体积内的力,如重力、惯性力等。 分为体积力(体力)和表面力(面力)两类。 有限元分析也使用集中力这一概念。
以通过一点的沿坐标正向微分线段的 正应变ε和 切(剪)应变 γ 来表示。 正应变εx ,εy , εz 以伸长为正。
切应变γxy , γyz ,γzx 以直角减小为正, 用弧度表示。 正应变和切应变都是无因次的量 应变列阵 x y z xy yz zx
Tຫໍສະໝຸດ 4. 位移材力研究方法
也考虑这几方面的条件,但不是十分严格的:常常引用近 似的计算假设(如平面 截面假设)来简化问题,并在许多 方面进行了近似的处理。 因此材料力学建立的是近似理论,得出的是近似的解答。 从其精度来看,材力解法只能 适用于杆件形状的结构。
★ 弹塑性力学研究问题的基本方法
在受力物体 内任取一点 (单元体)为 研究对象。
写成矩阵形式:
ε=
σ
ε=φσ 显然: φ=D-1
三、平衡方程
弹性体中任一点满足平衡方程, 在给定边界上满 足应力边界条件。
弹力的研究方法
在体积V内 由微分体的平衡条件,建立平衡微分方程; 由微分线段上应变与位移的几何关系,建立几何方程; 由应力与形变之间的物理关系,建立物理方程; 在边界 S 面上
x
二、物理方程
若弹性体只有单向拉伸或压缩时,根据材料 力学胡克定律:
弹性力学基本理论(车辆工程)
基本量和基本方程的矩阵表示
采用矩阵表示,可使公式统一、简洁,且 便于编制程序。
本章无特别指明,均表示为平面应力问 题的公式。
基本物理量:
• 体力 • 面力 • 位移函数
f ( fx f y )T 。 f ( fx f y )T 。 d (u(x, y),v(x, y))T。
• 应变
ε (εx εy γxy )T 。
2
P
1
y
N
B
x
将x、y轴分别放在两个主 A 应力的方向
N
N
§2-2 弹性力学的基本假设
•工程问题的复杂性是诸多方面因素组成的。如果不 分主次考虑所有因素,则问题的复杂,数学推导的困 难,将使得问题无法求解。
•根据问题性质,忽略部分暂时不必考虑的因素,提 出一些基本假设。使问题的研究限定在一个可行的范 围。
切应变: 以直角变小时为正,变大时为负; 线应变和切应变都是量纲为1的量
(四)位移
位移:物体变形时各点位置的改变量称为位移 1.当物体各点发生位置改变时,一般认为是由两种 性质的位移组成:
(1)整个物体像一个刚体一样运动所引起的位移, 包括平移、转动、平面运动等。这种位移并不使物 体的形状、质点间的相对距离发生变化。(刚体位 移)
△S
P
y 图1-3
(3)面力集度:
S上面力的平均集度为: F S
P点所受面力的集度为:
f lim F S 0 S
(4)面力分量:
z
fz F
P点的面力分量
△S
fx
f
fy P
y
为 f x 、f y 、f z ,其方向 与坐标轴正向相同时为正,
因次是[力][长度]-2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
∂τ ∂τ dx dx dy dy τ xy + xy dx dy ×1× + τ xy dy ×1× − τ yx + yx dx ×1× − τ yx dx ×1× =0 ∂x 2 2 ∂y 2 2
上式两边除dxdy,可得:
τ xy = τ yx
弹性力学的基本方程
弹性体在载荷作用下,体内任意一点的应力状态可 由六个应力分量:
σ x ,σ y ,σ z ,τ xy ,τ yz ,τ zx
应力分量的正负号规定如下:如 果某一个面的外法线方向与坐标轴 的正方向一致,这个面上的应力分 量就以沿坐标轴正方向为正,与坐 标轴反向为负;相反,如果某一个面 的外法线方向与坐标轴的负方向一 致,这个面上的应力分量就以沿坐 标轴负方向为正,与坐标轴同向为 负。应力分量及其正方向见图1
梁的弯曲
中性层:一根杆中处于中间的既不拉伸又不压缩的层, 如图中的 CC' 层。 对于纯梁弯曲形变有:
1 12τ ρ= = R Ybh3
其中:R 和 ρ 分别为中性层的半径和曲率;h 和b 分 别为梁的高度和宽度,τ为梁仅受的靠端部的力偶。
杆的扭曲
产生扭转的力偶
τ
和实心圆柱扭转角 ϕ 的关系:
τ=
有限元分析的基本原理
有限元与弹性力学的基本原理
之所以介绍弹性力学的有限元法的主要是:它概念浅 显,易于掌握,既可以从直观的物理模型来理解,也可 以按严格的数学逻辑来研究; 不仅能成功地分析具有复 杂边界条件、非线性、非均质材料、动力学等难题,而 且还可以推广到解答数学方程的其它边值问题,如热传 导、电磁场、流体力学等问题。
一、正压力(拉伸压缩应力)
Fn σ= S
例如图示, > 0 ,σ
( 1)
其中,F 沿作用力截面的法线方向。 。
二、线应变(相对伸长或压缩) 绝对伸长(或压缩)与原长之比称为相对伸长(或 压缩)。公式: ∆l
ε=
当
ε ε > 0 时,为拉伸形变; < 0 时,为压缩形变,因而,
b − b0 ∆b = b0 b0
其中,N 为剪切模量,反映材料抵抗剪切应变的能力。 通过理论推导,对于各向同性的,均匀的弹性体,有: Y N= 2(1+ µ) 上式说明了:三个量之间只有两个是独立的。其中:Y 是 杨氏模量,反映材料抵抗拉伸与压缩的能力;N 是剪切模量, 反映材料抵抗剪切形变的能力; µ 是泊松系数,描写材料横向 收缩或膨胀的特性。几个不同特性的量是有联系的。
几何方程的矩阵形式为:ε
= LU
(在V内)
其中,L为微分算子
∂ ∂x L= ∂ ∂y ∂ ∂z ∂ ∂z = AT ∂ ∂y ∂ ∂x
∂ ∂y ∂ ∂x ∂ ∂z
物理方程(应力-应变关系)
弹性力学由应力-应变之间的转换关系也称弹性 关系。对于各向同性的线弹性材料,应力通过应变的 表达式可用矩阵形式表示:
具体说来: 具体说来: 平面应力是指所有的应力都在一个平面内,如果平面是OXY平面, OXY平面 平面应力是指所有的应力都在一个平面内,如果平面是OXY平面,那么只有正应力 σx,σy,剪应力τxy(它们都在一个平面内) 没有σz τyz,τzx。 τxy(它们都在一个平面内 σz, σx,σy,剪应力τxy(它们都在一个平面内),没有σz,τyz,τzx。 平面应变是指所有的应变都在一个平面内,同样如果平面是OXY平面, OXY平面 平面应变是指所有的应变都在一个平面内,同样如果平面是OXY平面,则只有正应 εx,εy和剪应变 xy,而没有εz γyz,γzx。 εz, 变εx,εy和剪应变 γ xy,而没有εz,γyz,γzx。
F ∆l n =Y A l0
其中:Y 或E称为杨氏模量,反映材料对于拉伸或压缩 变形的抵抗能力,A截面积 。
四、拉伸或压缩的形变势能——属于形变物体本身所有
1 2 Ep = Yε V 2
( 7)
V-弹性体体积.同时有:弹性势能密度,即单位体积中 的弹性势能:
1 2 E = Yε 2
0 p
( 8)
回顾知识:弹性变形能 对于一维结构(拉压杆),在线弹性范围下,受力-变形关系所包含 的面积,数值上等于外力所做的功 W = EP 在一小段dx上的变形能为:
区别:
平面应力: 平面应力: 只在平面内有应力,与该面垂直方向的应力可忽略 例如薄板拉压问题。 垂直方向的应力可忽略, 只在平面内有应力,与该面垂直方向的应力可忽略,例如薄板拉压问题。 平面应变: 平面应变: 只在平面内有应变,与该面垂直方向的应变可忽略 例如水坝侧向水压问题。 垂直方向的应变可忽略, 只在平面内有应变,与该面垂直方向的应变可忽略,例如水坝侧向水压问题。
以X轴为投影轴,满足平衡方程:
剪力互等关系
∑F =0
∂τ ∂σ σ x + x dx dy × 1 − σ x dy × 1 + τ yx + yx dy dx × 1 − τ yx dx × 1 + f x dxdy × 1 = 0 ∂x ∂y
在微小位移和微小变形的情况下,略去位移导数 的高次幂,则应变向量和位移向量间的几何关系有:
∂µ ∂υ ∂ω ε x = ,ε y = ,εz = , ∂x ∂y ∂z ∂µ ∂υ ∂υ ∂ω ∂µ ∂ω γ xy = + = γ yx ,γ zy = + = γ yz ,γ zx = + = γ xz ∂y ∂x ∂z ∂y ∂z ∂x
弹性力学的分类
平面问题的基本理论
直角坐标解答 极坐标解答 温度应力 理论弹性力学
空间问题的基本理论
薄板理论 薄壳理论
应用弹性力学
弹性体力学的基本概念简介
弹性体有四种形变:拉伸压缩、剪切、扭转和弯曲。 其实,最基本的形变有两种:拉伸压缩和剪切形变;扭转 和弯曲可以看作是由两种基本形变的组成。
弹性体的拉伸和压缩形变
图1
应力分量的矩阵表示称为应力列阵或应力向量。
σ x σ y σ z σ = = [σ x σ y σz τ xy τ yz τ zx ] τ xy τ yz τ zx
பைடு நூலகம்
弹性体在载荷作用下,将产生位移和变形,即弹性体位置 的移动和形状的改变。弹性体内任一点的位移可由沿直角坐标 轴方向的3个位移分量 µ,υ,ω 来表示。它的矩阵形式是:
τ=
F S
( 1)
其中:S为假想截面ABCD的面积, 力F在该面上均匀分布。 三、剪切形变 ∆l 特征:表现为平行截面间的相对滑移。 tgψ = l ∆l 若 ψ 很小,则 ( 2) tgψ ≈ψ = l
切应角
四、剪切形变的胡克定律 若形变在一定限度内,剪切应力与剪切应变成正比:
τ = Nψ
( 3)
πNR4
2l
ϕ = cϕ
其中:R和 l 分别为圆柱的半径和长度,N是剪切模量, 式中c 是圆柱的扭转系数:
c=
πNR4
2l
弹性力学可分为空间问题(3D)和平面问题(2D)
任何弹性体总是处于空间受力状态,因而任何实际问题都是空间问题。但是 在某些情况下,空间问题可以近似地按平面问题处理。弹性力学平面问题可分为 两类:平面应力问题和平面变形问题。两类问题有许多共同特点,合称为弹性力 学平面问题。
µ U = υ = [µ υ ω] ω
称作位移列阵域位移向量。
ε 弹性体内任意一点的应变,可以由6个应变分量:x ,ε y ,ε z ,γ xy ,γ yz ,γ zx
其中 ε x ,ε y ,ε z 为正应变 γ xy , γ yz , γ zx 为剪应变。应变的正负 号与应力的正负号相对应,即应变以伸长时为正,缩短为负; 剪应变是以两个沿坐标轴正方向的线段组成的直角变小为正, 反之为负。 应变的矩阵形式是:ε x ε y εz ε = = [ε x ε y ε z γ xy γ yz γ zx ] γ xy γ yz γ zx 称作应变列阵或应变向量。
1 F 2 ( x) dE = F ( x)∆l = l ( x) 2 2 EA F 2 ( x) dE = dx 2 EA
E=∫
l
F 2 ( x) dx 2 EA
1 E = σε 2
0 P
对于空间三维体
1 U = 2
∫∫∫ εσ dV
V
弹性体的剪切形变
一、剪切形变 当物体受到力偶作用使物体的两个平行截面间发生相对平 行移动时的形变叫做剪切形变。例如:用剪刀剪断物体前即 发生这类形变。 二、剪应力
(1)平面应力问题:如梁,由于梁的厚度很小,而荷载 又都与Oxy平面平行,且沿z轴为均匀分布,因此可以认为沿 z轴方向的应力分量等于零。这种问题称为平面应力问题。
(2)平面变形问题:如一圆形隧洞的横截面。由于隧洞的 长度比直径大得多,而荷载又都与Oxy平面平行,且沿z轴为 均匀分布,因此可以认为,沿z轴方向的位移分量等于零。 这种问题称为平面变形问题。
f x , f y , f z单位体积的体积力在z,y,z方向的分量。
平衡方程的矩阵形式为 Aσ + f = 0 (在V内)
其中,A是微分算子
∂ ∂ ∂ 0 0 0 ∂x ∂y ∂z ∂ ∂ ∂ A= 0 0 0 ∂y ∂x ∂z ∂ ∂ ∂ 0 0 0 ∂z ∂y ∂x
弹性力学所依据的基本规律有三个:变形连续规律、 应力-应变关系和运动(或平衡)规律,它们有时被称为弹 性力学三大基本规律。弹性力学中许多定理、公式和结论 等,都可以从三大基本规律推导出来。
弹性力学的基本假设
物体是连续的 物体是完全弹性的 物体是均匀的 物体是各向同性的 位移和形变是很小的 理想弹性体
上式两边除dxdy,可得:
τ xy = τ yx
弹性力学的基本方程
弹性体在载荷作用下,体内任意一点的应力状态可 由六个应力分量:
σ x ,σ y ,σ z ,τ xy ,τ yz ,τ zx
应力分量的正负号规定如下:如 果某一个面的外法线方向与坐标轴 的正方向一致,这个面上的应力分 量就以沿坐标轴正方向为正,与坐 标轴反向为负;相反,如果某一个面 的外法线方向与坐标轴的负方向一 致,这个面上的应力分量就以沿坐 标轴负方向为正,与坐标轴同向为 负。应力分量及其正方向见图1
梁的弯曲
中性层:一根杆中处于中间的既不拉伸又不压缩的层, 如图中的 CC' 层。 对于纯梁弯曲形变有:
1 12τ ρ= = R Ybh3
其中:R 和 ρ 分别为中性层的半径和曲率;h 和b 分 别为梁的高度和宽度,τ为梁仅受的靠端部的力偶。
杆的扭曲
产生扭转的力偶
τ
和实心圆柱扭转角 ϕ 的关系:
τ=
有限元分析的基本原理
有限元与弹性力学的基本原理
之所以介绍弹性力学的有限元法的主要是:它概念浅 显,易于掌握,既可以从直观的物理模型来理解,也可 以按严格的数学逻辑来研究; 不仅能成功地分析具有复 杂边界条件、非线性、非均质材料、动力学等难题,而 且还可以推广到解答数学方程的其它边值问题,如热传 导、电磁场、流体力学等问题。
一、正压力(拉伸压缩应力)
Fn σ= S
例如图示, > 0 ,σ
( 1)
其中,F 沿作用力截面的法线方向。 。
二、线应变(相对伸长或压缩) 绝对伸长(或压缩)与原长之比称为相对伸长(或 压缩)。公式: ∆l
ε=
当
ε ε > 0 时,为拉伸形变; < 0 时,为压缩形变,因而,
b − b0 ∆b = b0 b0
其中,N 为剪切模量,反映材料抵抗剪切应变的能力。 通过理论推导,对于各向同性的,均匀的弹性体,有: Y N= 2(1+ µ) 上式说明了:三个量之间只有两个是独立的。其中:Y 是 杨氏模量,反映材料抵抗拉伸与压缩的能力;N 是剪切模量, 反映材料抵抗剪切形变的能力; µ 是泊松系数,描写材料横向 收缩或膨胀的特性。几个不同特性的量是有联系的。
几何方程的矩阵形式为:ε
= LU
(在V内)
其中,L为微分算子
∂ ∂x L= ∂ ∂y ∂ ∂z ∂ ∂z = AT ∂ ∂y ∂ ∂x
∂ ∂y ∂ ∂x ∂ ∂z
物理方程(应力-应变关系)
弹性力学由应力-应变之间的转换关系也称弹性 关系。对于各向同性的线弹性材料,应力通过应变的 表达式可用矩阵形式表示:
具体说来: 具体说来: 平面应力是指所有的应力都在一个平面内,如果平面是OXY平面, OXY平面 平面应力是指所有的应力都在一个平面内,如果平面是OXY平面,那么只有正应力 σx,σy,剪应力τxy(它们都在一个平面内) 没有σz τyz,τzx。 τxy(它们都在一个平面内 σz, σx,σy,剪应力τxy(它们都在一个平面内),没有σz,τyz,τzx。 平面应变是指所有的应变都在一个平面内,同样如果平面是OXY平面, OXY平面 平面应变是指所有的应变都在一个平面内,同样如果平面是OXY平面,则只有正应 εx,εy和剪应变 xy,而没有εz γyz,γzx。 εz, 变εx,εy和剪应变 γ xy,而没有εz,γyz,γzx。
F ∆l n =Y A l0
其中:Y 或E称为杨氏模量,反映材料对于拉伸或压缩 变形的抵抗能力,A截面积 。
四、拉伸或压缩的形变势能——属于形变物体本身所有
1 2 Ep = Yε V 2
( 7)
V-弹性体体积.同时有:弹性势能密度,即单位体积中 的弹性势能:
1 2 E = Yε 2
0 p
( 8)
回顾知识:弹性变形能 对于一维结构(拉压杆),在线弹性范围下,受力-变形关系所包含 的面积,数值上等于外力所做的功 W = EP 在一小段dx上的变形能为:
区别:
平面应力: 平面应力: 只在平面内有应力,与该面垂直方向的应力可忽略 例如薄板拉压问题。 垂直方向的应力可忽略, 只在平面内有应力,与该面垂直方向的应力可忽略,例如薄板拉压问题。 平面应变: 平面应变: 只在平面内有应变,与该面垂直方向的应变可忽略 例如水坝侧向水压问题。 垂直方向的应变可忽略, 只在平面内有应变,与该面垂直方向的应变可忽略,例如水坝侧向水压问题。
以X轴为投影轴,满足平衡方程:
剪力互等关系
∑F =0
∂τ ∂σ σ x + x dx dy × 1 − σ x dy × 1 + τ yx + yx dy dx × 1 − τ yx dx × 1 + f x dxdy × 1 = 0 ∂x ∂y
在微小位移和微小变形的情况下,略去位移导数 的高次幂,则应变向量和位移向量间的几何关系有:
∂µ ∂υ ∂ω ε x = ,ε y = ,εz = , ∂x ∂y ∂z ∂µ ∂υ ∂υ ∂ω ∂µ ∂ω γ xy = + = γ yx ,γ zy = + = γ yz ,γ zx = + = γ xz ∂y ∂x ∂z ∂y ∂z ∂x
弹性力学的分类
平面问题的基本理论
直角坐标解答 极坐标解答 温度应力 理论弹性力学
空间问题的基本理论
薄板理论 薄壳理论
应用弹性力学
弹性体力学的基本概念简介
弹性体有四种形变:拉伸压缩、剪切、扭转和弯曲。 其实,最基本的形变有两种:拉伸压缩和剪切形变;扭转 和弯曲可以看作是由两种基本形变的组成。
弹性体的拉伸和压缩形变
图1
应力分量的矩阵表示称为应力列阵或应力向量。
σ x σ y σ z σ = = [σ x σ y σz τ xy τ yz τ zx ] τ xy τ yz τ zx
பைடு நூலகம்
弹性体在载荷作用下,将产生位移和变形,即弹性体位置 的移动和形状的改变。弹性体内任一点的位移可由沿直角坐标 轴方向的3个位移分量 µ,υ,ω 来表示。它的矩阵形式是:
τ=
F S
( 1)
其中:S为假想截面ABCD的面积, 力F在该面上均匀分布。 三、剪切形变 ∆l 特征:表现为平行截面间的相对滑移。 tgψ = l ∆l 若 ψ 很小,则 ( 2) tgψ ≈ψ = l
切应角
四、剪切形变的胡克定律 若形变在一定限度内,剪切应力与剪切应变成正比:
τ = Nψ
( 3)
πNR4
2l
ϕ = cϕ
其中:R和 l 分别为圆柱的半径和长度,N是剪切模量, 式中c 是圆柱的扭转系数:
c=
πNR4
2l
弹性力学可分为空间问题(3D)和平面问题(2D)
任何弹性体总是处于空间受力状态,因而任何实际问题都是空间问题。但是 在某些情况下,空间问题可以近似地按平面问题处理。弹性力学平面问题可分为 两类:平面应力问题和平面变形问题。两类问题有许多共同特点,合称为弹性力 学平面问题。
µ U = υ = [µ υ ω] ω
称作位移列阵域位移向量。
ε 弹性体内任意一点的应变,可以由6个应变分量:x ,ε y ,ε z ,γ xy ,γ yz ,γ zx
其中 ε x ,ε y ,ε z 为正应变 γ xy , γ yz , γ zx 为剪应变。应变的正负 号与应力的正负号相对应,即应变以伸长时为正,缩短为负; 剪应变是以两个沿坐标轴正方向的线段组成的直角变小为正, 反之为负。 应变的矩阵形式是:ε x ε y εz ε = = [ε x ε y ε z γ xy γ yz γ zx ] γ xy γ yz γ zx 称作应变列阵或应变向量。
1 F 2 ( x) dE = F ( x)∆l = l ( x) 2 2 EA F 2 ( x) dE = dx 2 EA
E=∫
l
F 2 ( x) dx 2 EA
1 E = σε 2
0 P
对于空间三维体
1 U = 2
∫∫∫ εσ dV
V
弹性体的剪切形变
一、剪切形变 当物体受到力偶作用使物体的两个平行截面间发生相对平 行移动时的形变叫做剪切形变。例如:用剪刀剪断物体前即 发生这类形变。 二、剪应力
(1)平面应力问题:如梁,由于梁的厚度很小,而荷载 又都与Oxy平面平行,且沿z轴为均匀分布,因此可以认为沿 z轴方向的应力分量等于零。这种问题称为平面应力问题。
(2)平面变形问题:如一圆形隧洞的横截面。由于隧洞的 长度比直径大得多,而荷载又都与Oxy平面平行,且沿z轴为 均匀分布,因此可以认为,沿z轴方向的位移分量等于零。 这种问题称为平面变形问题。
f x , f y , f z单位体积的体积力在z,y,z方向的分量。
平衡方程的矩阵形式为 Aσ + f = 0 (在V内)
其中,A是微分算子
∂ ∂ ∂ 0 0 0 ∂x ∂y ∂z ∂ ∂ ∂ A= 0 0 0 ∂y ∂x ∂z ∂ ∂ ∂ 0 0 0 ∂z ∂y ∂x
弹性力学所依据的基本规律有三个:变形连续规律、 应力-应变关系和运动(或平衡)规律,它们有时被称为弹 性力学三大基本规律。弹性力学中许多定理、公式和结论 等,都可以从三大基本规律推导出来。
弹性力学的基本假设
物体是连续的 物体是完全弹性的 物体是均匀的 物体是各向同性的 位移和形变是很小的 理想弹性体