芯片视觉检测的定位算法及实现
胡跃明 半导体技术---IC芯片的高速高精度视觉检测定位算法及实现 已打
尚处于起步阶段。 如何采用相应的图像识别算法和 优化方案满足贴装过程的实时性和高速高精度要求, 是 SMT 设备国产化进程中迫切需要解决的问题 [1] 。 I C 芯片如 S O P ,Q F P 等由于其引脚多、间距 小、 定位精度要求高, 对识别正确率和误检率都要 求很高, 这就要求视觉识别的鲁棒性要好。 一般对 于图像定位问题常采用模板匹配算法 [2,3],但模板 匹配算法的角度计算精度不够高, 而且需要建立模 板图像, 而芯片的多样性使得一方面很难得到统一 的模板,另一方面建立 0°的模板在实际操作中也
4 结语
本文针对IC芯片视觉检测与定位的任务提出了 一种自主研发的图像识别算法, 并已应用到实际的 贴片机系统中。 现场生产过程表明, 该算法角度识 别精度为 0.05°,X 、Y 识别精度为± 0.05mm,在 速度和精度方面都可以满足实际贴装生产的要求, 并具有较好的鲁棒性。 本文提出的有关图像识别算 法以及实现技术, 对其他微电子生产过程的视觉检测 和定位问题也具有一定的参考作用。 参考文献:
封装测试技术
IC芯片的高速高精度视觉检测 定位算法及实现
胡跃明,黄恢乐,袁鹏,刘海明
(华南理工大学自动化科学与工程学院, 广州 510640)
摘要:多引脚小间距 I C 器件是电子产品生产过程中视觉检测与定位的难点。针对高速高精度贴片机生 产中 I C 芯片的图像识别对中问题,介绍了 I C 的视觉检测任务,提出一种自主研发的识别与定位算法及其 实现技术。现场实际运行结果表明,该算法的速度和精度能满足实际生产的需要,并具有较强的鲁棒性。 关键词:集成电路;视觉检测;定位算法 中图分类号:TP273 +.5;TP391.41 文献标识码:A 文章编号:1003-353X(2006)01-0031-04
基于特征匹配芯片管脚视觉检测系统
摘要基于特征匹配的芯片管脚视觉检测系统摘要本论文首先介绍了国内芯片生产的概况,以及本课题的研究和开发的必要性,然后详细介绍了系统的硬件组成、图像识别前的图像处理、芯片的缺陷检测几个方面。
本文分析了计算机视觉系统的图像处理与图像识别技术。
从视频采集、图像处理及图像识别三个部分提出了要解决的主要问题及实现的关键技术。
采用MATLAB语言编程很好的实现了系统的功能。
本文列举了对芯片图像采集和预处理的方法,如灰度化、滤波,边缘检测等,并提出了在特征匹配时采用改进的sSDA算法并给出了具体的步骤,从而完成了芯片管脚间距的识别。
实现了对芯片管脚间距的定量分析。
实验证明,本文提出的硬件和软件的设计和实现的方法对于相近工业领域的定量分析提供了可行的理论和参考价值。
关键词:芯片管脚,缺陷检测,图像识别,特征模板匹配。
SSDA洛阳工学院硕士学位论文AVISl0NMEASUREMENTSYSTEMDESIGNBASEDONFEATUREMATCHINGOFCHIPSPACINGABSTRACTThispaperfirstintroduceStheprofileofchiPproductioninChilla,andtheneeessityofresearchanddevelopmentofthissuhjeel,andthekeypointsofthesysterndesign.ThenitgiVeSafuIIdescfiptiouaboutthedesignofthehardwareandsoftware.’l'hepaperanalysestheimageprocessandrecognitiontechniquesofcomputervisionsystem.Anditbringsforwardthemainquestionstosettle.andthekeYtechniquestorealizeinthethreePartsofthesystem—videocollecting,imageprocessingandimagerecognition.UsingMATLABlanguage,itrealizesthefunctionsofthesystem.Thispaperlistsaserialofmethodsofimagecollectingandpreprecessingsuchasthegrayleve]transformation,fiIter,edgedetection,etc.TheimprovementofSSDAismadeintheprocesesoffeaturematchingandthedetailedstepshavebeenstated.Thusthechippinspacingrecognitionhasbeenachivedandthequantitativeanalysishasbeenrealized.Theexperimentshavebeenshowthat,thedesignofhardware。
使用计算机视觉技术实现目标追踪的方法与技巧
使用计算机视觉技术实现目标追踪的方法与技巧简介计算机视觉是人工智能领域的重要分支,通过计算机视觉技术,我们可以实现自动识别、检测和追踪目标对象。
目标追踪是计算机视觉领域中的一项重要任务,它在各种应用中起到至关重要的作用,例如监控系统、无人驾驶、视频分析等。
本文将介绍一些常用的方法和技巧,帮助您实现目标追踪任务。
一、目标检测算法目标追踪的第一步是目标检测,即在图像或视频中找到感兴趣的目标。
目标检测通常使用深度学习方法,如卷积神经网络(CNN)。
常见的目标检测算法包括SSD、YOLO和Faster R-CNN等。
这些算法能够高效地检测出图像或视频中的目标,并输出其位置、类别等信息。
二、目标跟踪算法目标跟踪算法是目标追踪的关键部分,它基于目标检测的结果,在连续帧中准确地跟踪目标。
常用的目标跟踪算法包括基于模板匹配的相关滤波器、基于图像特征的光流法、基于深度学习的Siamese网络等。
1. 基于相关滤波器的目标跟踪基于相关滤波器的目标跟踪方法是最早应用的一种方法之一。
该方法基于目标的模板与当前帧进行相关计算,从而得到目标在当前帧中的位置。
常见的相关滤波器包括均值滤波器、孪生均值滤波器和梯度相关滤波器等。
这些方法适用于目标运动平稳的情况,但对于目标快速运动或遮挡的情况可能不够准确。
2. 基于光流法的目标跟踪光流法是一种基于图像的运动估计方法,可以用于目标跟踪。
该方法利用图像中的像素在连续帧之间的运动信息来估计目标的位置。
光流法可以通过计算不同帧之间的图像亮度变化或特征点的位移来得到目标的运动轨迹。
然而,光流法对图像噪声和运动模型的假设比较敏感,适用于目标运动较小的情况。
3. 基于深度学习的目标跟踪近年来,随着深度学习的快速发展,基于深度学习的目标跟踪方法逐渐成为主流。
Siamese网络是其中的一种典型方法,它利用两个共享权重的卷积神经网络,通过计算模板与当前帧之间的相似度来进行目标跟踪。
Siamese网络具有良好的鲁棒性和准确性,在目标遮挡和复杂场景下能够取得良好的效果。
基于深度学习的芯片位置检测系统
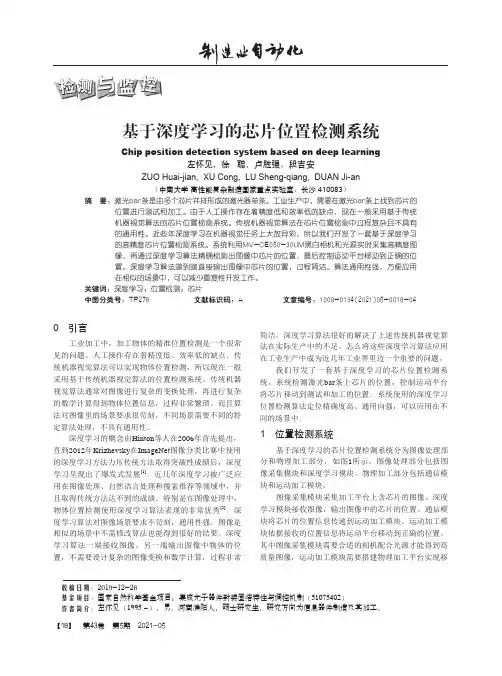
图3 物理加工平台
1.2 物理加工平台 物理加工平台分为通信部分和物理移动部分。通信
部分控制器MPC08控制卡接收计算机发送的芯片位置信 息。物理移动部分控制器MPC08控制卡依据芯片的位 置信息发出控制命令。步进电机和气缸依据控制命令移 动进而带动运动平台运动。图4展示了整个物理加工的 流程。
(1)
式中:Hi为实际物体的高度;Ho为相机成像后物体 的高度;Di为物距;Do为相距;TIMES为镜头的放大倍 数。镜头里参数的几何意义如如2所示。
图2 镜头里参数的几何意义
系统里的工业相机选用海康威视公司的黑白相机, 型号为MV-CE050-30UM黑白相机。相机500万像素, 传感器为cmos,通信接口为usb3.0,输出图像分辨率为 2592×1944。cmos传感器对实际物体扫描采样的最小 单位是0.0022mm×0.0022mm。系统采集的图像精度为 0.0022mm(亚微米级别),完全达到检测要求。图3物 理加工平台中相机位置大约在芯片位置的正上方。
基于深度学习的芯片位置检测系统
Chip position detection system based on deep learning
左怀见,徐 聪,卢胜强,段吉安
ZUO Huai-jian, XU Cong, LU Sheng-qiang, DUAN Ji-an
(中南大学 高性能复杂制造国家重点实验室,长沙 410083)
(4)
2.2 实验过程 深度学习算法需要大量的图像训练,来调试模型
里的参数才能达到预期的结果。实验员在机器上随机采 集1000张不同场景的加工图像,标注出图像中芯片的位 置,制成训练集。模型使用训练集中的图像进行训练。 因为训练过程不知道模型性能怎么样,所以还需要验证 集测试当前模型的好坏。实验员随机采集100张和训练 集不重复的图像制成验证集。
QFP芯片贴装定位的视觉检测算法研究
姜利QFP 芯片贴装定位的视觉检测算法研究
DOI:10.19344 / j.cnki.issn1671-5276.2022.05.033
QFP 芯片贴装定位的视觉检测算法研究
姜利
( 江苏省常州技师学院ꎬ江苏 常州 213032)
摘 要:针对采用数学形态学闭运算进行 QFP 芯片引脚修复的图像检测算法实时性差问题ꎬ设
角ꎬ根据转角和 4 个极值点可以确定 4 条直线ꎬ利用点到
直线的距离提取芯片每侧引脚顶点ꎬ运用推广的最小二乘
利用 4 个 极 值 点 U ( X U ꎬ Y min ) 、 R ( X max ꎬ Y R ) 、 B ( X B ꎬ
Y max ) 、L( X min ꎬY L ) 和芯片转角 θ 可以确定 4 条直线ꎬ如图 6
i=1
k4
∑( x
i=1
4i
+ ky4i - b L ) 2 ]
信息技术
姜利QFP 芯片贴装定位的视觉检测算法研究
然后分别对 k、bU 、bR 、bB 、bL 求偏导数ꎬ求得斜率 k 和每
条边对应的截距 b U 、b R 、b B 、b L ꎬ最终得到矩形拟合的 4 个
直线方程:上侧 L U :y = k′U x +b U ꎬ下侧 L B :y = k′U x +b B ꎬ左侧
1 QFP 芯片的几何特征
随着电子元件封装向小型化、微型化、片式化等方向
鲜明的几何特征是表面贴装元件最基本的特点ꎬ只有
发展ꎬ表面组装技术( SMT) 便成为电子元器件组装( 又称
抓住了这个关键点ꎬ视觉检测工作才能高效地进行ꎮ SMT
面组装元件的类型目前尚无统一的国际标准ꎬ用于表面贴
应起来ꎬ因此没有比从考虑元件脚的位置入手得到元件位
视觉目标检测与跟踪算法
视觉目标检测与跟踪算法随着计算机视觉和人工智能的快速发展,视觉目标检测与跟踪算法成为了该领域的热门研究课题。
视觉目标检测与跟踪算法的应用十分广泛,包括自动驾驶、智能监控、机器人导航等领域。
对于实时场景中的目标检测与跟踪,准确性和实用性是评估算法性能的重要指标。
在本文中,我们将介绍几种常见的视觉目标检测与跟踪算法,并对其原理和应用进行详细的分析。
一、视觉目标检测算法1. Haar特征检测算法Haar特征检测算法是一种基于机器学习的目标检测算法,其原理是通过计算目标区域内的Haar-like特征来判断目标是否存在。
该算法在检测速度方面表现出色,但对目标外貌的变化和旋转不具有很好的鲁棒性。
2. HOG特征检测算法HOG特征检测算法通过计算图像局部梯度的方向直方图来描述目标的外貌特征,并通过支持向量机等分类器进行目标检测。
该算法在复杂背景下的目标检测效果较好,但对于目标遮挡和旋转等情况的处理能力较差。
3. 基于深度学习的目标检测算法基于深度学习的目标检测算法通常基于卷积神经网络(CNN)结构,如Faster R-CNN、YOLO、SSD等。
这些算法通过在网络中引入特定的层和损失函数,能够实现更高的目标检测准确性和实时性。
然而,由于网络结构复杂,算法的运行速度较慢。
二、视觉目标跟踪算法1. 卡尔曼滤波器卡尔曼滤波器是一种常用的目标跟踪算法,其基本原理是将目标的状态建模为高斯分布,并通过状态预测和观测更新两个步骤来实现目标跟踪。
该算法在实时性和鲁棒性方面表现出色,但对目标的运动模型假设较强。
2. 文件特征跟踪算法文件特征跟踪算法通过提取目标区域的特征信息,并通过计算特征匹配度来判断目标位置的变化。
该算法对于目标的尺度变化和旋转等问题有一定的鲁棒性,但对于目标确切形状的要求较高。
3. 基于深度学习的目标跟踪算法基于深度学习的目标跟踪算法通常基于卷积神经网络(CNN)结构,如SiameseRPN、SiamFC等。
BGA芯片的高速高精度视觉检测与定位算法
Ke r s B y wo d : GA; s n d tci n; on a tr ; MT p a e n ; o t g Vi o ee t i o P itp t n S l c me t S r n e i
( o t hn nvri f eh o g , a g h u 5 0 4 , hn ) S uh C iaU ies yo c n l y Gu n z o 6 0 C a t T o 1 i
Ab t a t Ac o d n o t e p s i n n n e e t g p o l ms o o u e iin i h ih s e d sr c : c r i g t o i o i g a d d t c i r b e fc mp tr vso n t e h g p e h t n a d h g r cso MT p a e n ,t e rc g i o r h t f B s r s a c e . h a e rt n ih p e iin S lc me t h e o n t n a t mei o GA i e e r h d T e p p r f s y i i c i l p i t o tt e k y o h e o n t n o G b n y i g t e r c g i o a k n t e p o e s o MT on s u h e f t e r c g i o f B A y a a sn h e o n t n ts s i h rc s f S i l i p a e n r d ci n S c n l ,t e c re p n i g i g e o n t n a t me i f me i g v n T i l , lc me t o u t . e o d y h o r s o d n ma e r c g i o r h t a s ie . hr y p o i i cl d t e p it a tr t hn s d i r p s d a t mei sd s r e .F n l t e a t mei sgv n o t n h on t n mac i gu e p o o e r h t i e c b d i a l h r h t i ie u p e n i c i y, i c i d ti.T e r s l d mo sr tst a e s e d a d a c r c f h r h t r o d e o g o me t h eal h e u t e n t e t h p e n c u a y o e a t mei a e g o n u h t e e a h t t i c t p a t a p l ai n r q i me t. B s e h t h r h t e f r n e i etr t a h o n a— r ci la p i t e u r c c o e n s e i st a ,t e a t mei p r ma c s b t h n t e p i tp t d i c o e
面向IC封装的机器视觉定位算法研究
起 来 , 即完 成 封 装 体 内部 组 装 。 后道 ( E OL)主
要 是 完 成 封 装 并 且 形 成 指 定 的外 形 尺 寸 。 前道 生 产工艺包括磨片 ( Ba c k f r i n d i n g ) 、装 片 ( Wa f e r
Mo u n t )、划 片 ( Di e S a wi n g) 、 贴 片 ( Di e
由 于 芯 片 和 基 座 都 是 矩 形 , 加 工 误 差 小 于
7 . 5
。因 此 ,在 进 行 芯 片 封 装 的键 合 定位 时 ,
中 心位 置 可 以 求 出 在设 备坐 标 系下 基 座 实 际位 置
中图分类号 :T P 3 9 1 文献标识码 :A 文章ቤተ መጻሕፍቲ ባይዱ号 :1 0 0 9 -0 1 3 4 ( 2 0 1 4 ) 0 2 ( 下) - 0 0 7 5 -0 5
D o i :1 0 . 3 9 6 9 / j . 1 s s n . 1 0 0 9 -0 1 3 4 . 2 0 1 4 . 0 2 ( 下) . 2 1
W ANG J u a n ,F ANG Z h o u ,L I U Bo,ZHANG J u n . a n
( 西安 工业 大学 机 电工程学 院,西安 7 1 0 0 3 2 )
摘 要:在I c 封装过程中,为了解决引线键合理论位置与实际位置不重合的问题,本文提出采用最小外
装 基 板 中 ,并 将 其 上 的 I / O点 用 导 线 连 接 到 封 装
外 壳 引脚 上 的 过 程 n 。芯片封装工艺 分为两段 , 分 别 叫前 道 ( F r o n t — o f - l i n e ,F OL)和 后 道 ( E n d — o f — l i n e ,E OL) , 前道 ( F OL)主 要 是 将 芯 片和 引线 框 架 ( L e a d fa me )或基 板 ( S u b s t r a t e )连 接
使用计算机视觉技术进行视觉定位的算法和误差分析
使用计算机视觉技术进行视觉定位的算法和误差分析视觉定位是计算机视觉领域的关键技术之一,它可以通过分析图像特征来确定相机在三维空间中的位置和方向。
随着计算机硬件和算法的快速发展,视觉定位在自动驾驶、增强现实、机器人技术等领域的应用越来越广泛。
本文将介绍使用计算机视觉技术进行视觉定位的算法和误差分析。
在视觉定位算法中,最常用的方法之一是基于特征点的定位。
该方法通过在图像中检测和匹配特征点,根据特征点的位置关系计算相机的位姿。
常用的特征点包括SIFT、SURF和ORB等。
这些特征点具有旋转不变性和尺度不变性,能够在不同视角和尺度下进行有效匹配,从而提高定位的准确性。
视觉定位算法的一种常见误差源是图像噪声。
图像噪声可以来自于相机传感器的噪声、环境光照变化、图像压缩等因素。
为了降低图像噪声对定位结果的影响,可以采用图像去噪技术,在定位前对图像进行预处理,去除噪声。
另一个误差源是特征点匹配的误差。
特征点匹配的准确性直接影响着视觉定位的准确性。
在匹配过程中,可能会存在特征点数量不足、误匹配和遮挡等问题。
针对这些问题,可以采用多尺度匹配、滑动窗口匹配和RANSAC等方法进行特征点的筛选和匹配。
此外,也可以结合其他传感器的信息,如GPS、惯性测量单元(IMU)等,进行多传感器融合,提高定位的鲁棒性。
除了特征点匹配误差,相机姿态估计的误差也会对视觉定位的精度产生影响。
相机姿态估计一般采用PnP(Perspective-n-Point)问题求解方法,该方法通过匹配特征点和已知的三维模型,计算相机的旋转矩阵和平移矩阵。
然而,由于特征点匹配误差和姿态估计算法的局限性,相机姿态的估计结果会存在误差。
针对这个问题,可以采用非线性优化方法,如Levenberg-Marquardt算法,对姿态进行优化,提高定位的精度。
此外,还有其他一些误差源需要考虑。
例如,图像畸变会对特征点的位置计算产生影响,可以通过相机校准和去畸变技术来解决。
固晶机视觉定位方法
固晶机视觉定位方法一、引言随着工业自动化的发展,固晶机在半导体封装行业中得到了广泛应用。
固晶机的视觉定位是其中关键的环节之一,它能够实现对芯片和基板的高精度定位,保证封装质量和生产效率。
本文将介绍固晶机视觉定位的方法和技术。
二、固晶机视觉定位的原理固晶机视觉定位主要依靠图像处理和模式识别技术,通过对芯片和基板的图像进行处理和分析,得到它们之间的相对位置关系,从而实现定位。
1. 图像获取固晶机通过摄像头或激光扫描仪等设备获取芯片和基板的图像。
在图像获取过程中,要注意光照条件、摄像头的分辨率和对焦等因素,以保证图像的清晰度和准确性。
2. 图像预处理获取到的图像通常会受到噪声、光照不均匀等因素的影响,需要进行预处理来提高图像质量。
预处理包括图像去噪、灰度变换、边缘检测等操作,以便后续的图像分析和处理。
3. 特征提取在图像中,芯片和基板通常具有一些特征,如边界、角点等。
通过特征提取算法,可以将这些特征从图像中提取出来,并对其进行描述和定位,以便后续的匹配和定位操作。
4. 特征匹配特征匹配是固晶机视觉定位的核心步骤,它通过比较芯片和基板的特征,找到它们之间的对应关系。
常用的特征匹配算法包括模板匹配、特征点匹配等。
通过特征匹配,可以得到芯片和基板之间的相对位置关系。
5. 定位算法通过特征匹配得到芯片和基板的相对位置关系后,可以利用定位算法计算它们的绝对位置。
常用的定位算法包括基于几何关系的定位算法、基于模型匹配的定位算法等。
定位算法的选择要根据具体的应用场景和需求来确定。
三、固晶机视觉定位的技术固晶机视觉定位涉及到多个技术领域,下面将介绍其中一些关键的技术。
1. 图像处理技术图像处理技术包括图像滤波、边缘检测、形态学处理等操作,可以提高图像的质量和准确性。
常用的图像处理库有OpenCV、Matlab 等,它们提供了丰富的图像处理函数和算法。
2. 特征提取与匹配技术特征提取与匹配技术是固晶机视觉定位的关键技术之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
是 半 导 体 封 装 中保 证 产 品质 量 的 最后 一 道 关键 工 序 , 快 , 匹 配准确 ; 且 门限选 取过 大 , 处理 速 度 提高 慢 ; 取 选 该制 程需 要对 芯 片及 其 引脚 缺 陷等 进行 检测 。机器 视 过 小 。 匹配 又 不准 确 。 因此 。 在实 际应 用 中 , 大多采 用 自 觉检 测技 术作 为 一种非 接 触 测量 技术 。 有 非接 触性 、 适 应 门 限序 列 的 S D 具 S A算法 实 时 性 、 活性 和高 可靠 性等 优点 , 灵 在微 电子 制 造 中得 因 此 .本 文采 用 了梯 形 分层 搜 索 的 序 贯相关 判 决 到 了广泛 应用 。但 是 . 针对 I 道 封装 工序 生 产过 程 算 法 的匹配 策 略 .采用 梯形 分层 搜 索缩 短 了 匹配 点 的 C后
项外 观检 测 的实 时性 、 准确性与 可靠性 。
参 考 文献:
【】 晖 . 于机 器视 觉 的表 面 贴 装 芯 片 引脚检 测 的研 究 0] 州: 1旷 基 3. 广 广 东 工业 大 学 .0 6 20. []t : w 2ht / ww.mi r. p/ s .g e o
应 的测试 结果
Sel 将 采 集 到 的待 识 别 图像 和 模 板 图像 每 n n t : p × 个 像 素 的像 素值 加 权 平 均 为 一 个 像 素 构 成 第 二 级 图
像。 同理在 第二 级 图像 的基础 上 构成 第 三级 图像 . 如此 2 芯片 的识 别与 定 位 、 在半 导 体 器 件外 观 视 觉检 测 中 .首 先 要 根据 检 测 迭 代下 去可 构 成一 系列 的 图像 序 列 .得 到 一 系列 由小 项 目搜 索 到 相应 区域 。 区域 包 含 待 检 的对 象 , : 该 如 引 到 大 的图像 梯形 结构阁, 图一 所 示 ; 如 脚 、 位孔 、 封体 等 , 图 像处 理 上 通 常 把 这些 区域 定 塑 在
图 一 “ 字塔 ” 层 图像 示 意 图 金 分
E
l (, (, (2 的相似度 : 1 一 m1 f 2) ) 一 ,+ )
—
S p: t 2 由上 到下逐个计算每一级 图像和对应模板 e
式(— ) , y分 别 是 子 图 和 模 板 中像 素 灰 度 级 2 2中 ,
称 为 R I einO trs  ̄域 。 O ( go f nee0 R I 因此 . 准 确快 速 地 能
搜 索 到相应 的 R I O 区域 是有 效检 测 的前提 和保 证 。 17 92年 .a e B m a和 Slema 出 了一 种 效 率 很 高 i r n提 v 的序 贯 相 似 性检 测算 法(eu ni i lryD t t n S q e t l mi i ee i a S at co
3 实验 结果 、
根据 以上分 析 .本 文应 用 该 算法 对 导线 架 中的 芯 片进行 匹配 检验 。 图二 是一个 待 匹配 的 目标 图 . 如 图三
是 模板 图
0 S4 ( 1 038 5 8 5 . , .) 9 39 0 8
表一
目标 图 匹 配结 果 ( 分 ) 部
[8赵 妍 妍 , 兵 , 挺 . 本 情 感 分 析 Ⅱ. 件 学报 .001 ( ) 3】 秦 刘 文 】 软 21, 8: O
13 8 4-1 48 8 .
【1雷震 , 31 吴玲 达 , 雷蕾 等 . 始 化 类 中心 的 增 量 K 均值 法及 其在 初
新 闻事 件 探 测 中的 应 用 .情 报 学报 IS 0 0 0 3 . 0 ,53: [ 】 SN10 — 15 06 2 ( 3 庞俊. 于确定话题和情 感极性的博客文本 聚类研 究0】 2 ) 9 基 3. 武 汉 : 汉 理 工 大 学 。0 0 武 2 1. 2 -2 . 59 95 [2 ̄- , 满 泉 , 洪波 . 于 多 策略 优化 的 分 治 多层 聚 类 算 【 ] iNa kwa B n ̄ R.et naa zr xrcn s t n 3 ]lZ 于 3 许 基 4 VJ s a T,u e u . ni t l e: t t ge i 0 , u S me n y e a i n me a n l it n: X 法 的话 题 发 现 研 究.全 国第 八 届 计 算 语 言 学联 合 学术 会 议 0 — t b ua ie tpc s g a a a g a e rc sn eh iu sI W u S s o tgv no iui n mrl n u gp o es g c nq e.
S p ̄ t 3 在每一级的相关性计算 的过程中。 e , 可采取序 贯相关性算法 ,即把模板和要识别 的图像部分分成若
福
建 电
脑
2 1 年第 8期 01
干 小 块 , 计算 某 一块 或几 块 的 相关 性 见 , 果 小 于 脚 的检 测提供 了可 靠 、 先 如 准确 的 R I O 区域 。 设 定 的 阈值 0 则 可认 为 si) 是要关 心 的 目标 区域 , , ( 不 j
匹配中 心位置
l e f x1 ' ) i
角度
(c) Dz
从 而进 行 下 一个 目标 图 像 的 匹配 。如 果 兄> , 拿整 再
个 S J 整 个 模 板 进 行 相 关 性 计 算 , 一 步 确 定 对 , 和 进 si) ( 的取 舍 。 过 图像 搜 索后 , j 通 分别 得到 导线架 中芯 片
0 96 ( 0 84 1 .22 . 1 7 . ,7. 9 02 加) o 5 . 0 95 ( 1 066 5 . 1 7 . ,3. ) _ 1l 9 04 3 o7 . 09l . 0 9 ( 2 738 9 6 . ,0 . ) .. 1 07 1 0 0 0 O1] . 4
Agrh S D ) ,该 算 法从 以下 两个 方 面对 计 算 效 loi m, Ar t S  ̄ 率 进行 了改进 。 首先 , 法使 用 的相 似性 度量 方法 计 算更 为简 单 : 算
字l 葛 0 若 展
(- ) 21
对 E进行 归一 化 得到 :
M N . .
【 关键词】 自动化检测 芯片识别与定位 梯形分层搜 索序贯相关判决算法 :
1 引 言 、
随 着 现代 半 导 体器 件 向微 型化 、集 成 化 和高 可 靠
的平 均值 。 S D 实质 上 是 把 向量 空 间 中两 点 间 的距 离 作 为 SA
性 方 向发 展 以及 1益激 烈 的市场 竞 争 .半导 体产 品生 两个向量相似程度的度量 .与归一化灰度级相关算法 3 此算 法 没有乘 法运 算 , 减少 了计 算量 。 产 与制 造 设 备 正朝 着 高 速 度 、 精 度 、 能 化 、 性 制 相 比 , 高 智 柔
】 计 2 0 ,03:7 6 . 图 中很好 地匹 配到 了所设 定 的模 板 .从而 为这 部分 引 的设 计 与 实现 Ⅱ. 算机 工程 与 科 学 ,0 83 ()5 — 1
f 上接 第 4 页1 1
h g a hie y es1 9 3 a M c n r Pr s, 9 8:7—4 5
测 试 采 用凌 华 科 技 有 限公 司 的 A 0 3 1工 业 控 制计
【]a e l Sl r n H.. lso l rh rFs Dgt 3 r aE , i ema FA c s f g i msf a iil B n v a A o t o t a I g .g tt n I. E r c o o o ue ,92 C一 maeleir i JI E T a t m nC mp t s17 ,  ̄ s ao ]E ma i r
造 系统 ( MS 、 V ) 多功能 等 自动 化方 向发展【 I 】 。 SD S A算 法 通 常 有 三种 :固 定 门 限 的 S D S A算 法 、
半 导 体 生产 通 常分 为 前 后两 道 工 序 。前 道工 序 指 单 调 递增 门限序 列 的 S D S A算 法及 自适 应 门 限序 列 的 SD S A算法 。 于固定 门 限法和单 调 递增 门 限序列 法来 对 芯 片扩 散 、 快速 热 处 理 、 片处 理 等 过程 , 道工 序 主 硅 后
的实 时 高 速 高精 度 高 可 靠 性 的 质 量检 测 和定 位 问题 . 搜 索事 件 。 而序 贯相 关判 决法 保证 了搜 索 的精度 。 算 该 国 内相关 工作 还 非常 少 。本 文重 点 分析 了利 用 梯形 分 法 的基 本 步骤 如下 :
层 搜 索 的序贯 相关 判决 算 法 的 匹配 策略 ,并 给 出 了相
序号 相似度
0 l 2 3 4 5 1 00 .0 0 0 96 . 6 9 0 95 96 0 94 . 6 9 O95 . 1 9 0 90 .4 9
匹配中心位置
ft) P. i1 e
角度
fc D
序号 相似度
6 7 8 9 l 0 l l O91 .3 9
4 结 论 、
本 文 针对 I 道封 装 工序 生产 的 高速 、 C后 高精 度 的
特 点 .采用梯 形分 层搜 索 的序贯相 关判 决 算法 的 匹配
策 略进行 芯片 的识 别与定 位 。 过实 例表 明 . 算法 很 通 该 好地 实现 了 目标 图像 的识别 与定位 .保 证 了后续 的各
2 1 年第 8期 01
福
建 电
脑
8 7
芯片视觉检测 的定 位算 法及 实现
汤 晓 燕