a接触网腕臂支持结构的仿真分析
关于铁路单线隧道接触网弓形腕臂预配平台的相关研究
关于铁路单线隧道接触网弓形腕臂预配平台的相关研究作者:杜广志来源:《中小企业管理与科技·下旬刊》2021年第02期【摘要】为降低铁路单线隧道接触网弓形腕臂预配施工难度,论文研究了一种接触网弓形腕臂预配平台,结合单线隧道内弓形腕臂数据精测技术及计算软件,精确测量预配,保证弓形腕臂的安装精度和质量,使弓形腕臂在现场施工中一次成优。
论文结合实际,就某铁路单线隧道接触网弓形腕臂预配平台作具体分析。
【Abstract】In order to reduce the difficulty of the pre-fabrication construction of the arched catenary cantilever in railway single track tunnel, this paper studies a kind of pre-fabrication platform of arched catenary cantilever. Combined with the data precision measurement technology and calculation software of arched cantilever in single track tunnel, the platform can accurately measure the pre-fabrication, ensure the installation accuracy and quality of arched cantilever, so that the arched cantilever can achieve the best quality at one time in the field construction. Combined with the actual situation, this paper makes a specific analysis on the pre-fabrication platform of arched catenary cantilever in a railway single track tunnel.【關键词】单线隧道;接触网弓形腕臂预配平台;腕臂数据【Keywords】single track tunnel; pre-fabrication platform of arched catenary cantilever; cantilever data【中图分类号】U225.4 【文献标志码】A 【文章编号】1673-1069(2021)02-0180-021 引言金台铁路为浙江省第一条自主建设的电气化铁路,正线为单线,隧道也以单线隧道为主,单线隧道最大特点为隧内净空面积小,所以接触网隧内悬挂形式为弓形腕臂悬挂,通过复合绝缘子和隧道壁或吊柱连接固定,整体呈150°向上倾斜,上端和轨面线平行安装承力索座,整体结构相对简单。
高速铁路接触网新型斜腕臂及铰链型定位环研发
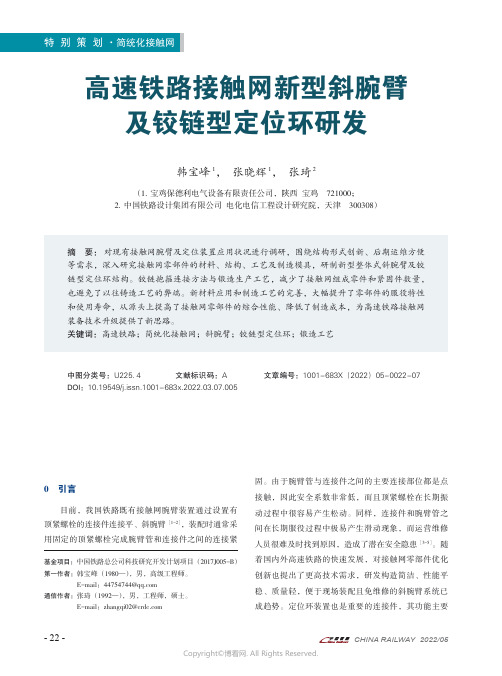
特别策划·简统化接触网高速铁路接触网新型斜腕臂及铰链型定位环研发韩宝峰1,张晓辉1,张琦2(1.宝鸡保德利电气设备有限责任公司,陕西宝鸡721000;2.中国铁路设计集团有限公司电化电信工程设计研究院,天津300308)摘要:对现有接触网腕臂及定位装置应用状况进行调研,围绕结构形式创新、后期运维方便等需求,深入研究接触网零部件的材料、结构、工艺及制造模具,研制新型整体式斜腕臂及铰链型定位环结构。
铰链抱箍连接方法与锻造生产工艺,减少了接触网组成零件和紧固件数量,也避免了以往铸造工艺的弊端。
新材料应用和制造工艺的完善,大幅提升了零部件的服役特性和使用寿命,从源头上提高了接触网零部件的综合性能、降低了制造成本,为高速铁路接触网装备技术升级提供了新思路。
关键词:高速铁路;简统化接触网;斜腕臂;铰链型定位环;锻造工艺中图分类号:U225.4文献标识码:A文章编号:1001-683X(2022)05-0022-07 DOI:10.19549/j.issn.1001-683x.2022.03.07.0050引言目前,我国铁路既有接触网腕臂装置通过设置有顶紧螺栓的连接件连接平、斜腕臂[1-2],装配时通常采用固定的顶紧螺栓完成腕臂管和连接件之间的连接紧固。
由于腕臂管与连接件之间的主要连接部位都是点接触,因此安全系数非常低,而且顶紧螺栓在长期振动过程中很容易产生松动。
同样,连接件和腕臂管之间在长期服役过程中极易产生滑动现象,而运营维修人员很难及时找到原因,造成了潜在安全隐患[3-5]。
随着国内外高速铁路的快速发展,对接触网零部件优化创新也提出了更高技术需求,研发构造简洁、性能平稳、质量轻,便于现场装配且免维修的斜腕臂系统已成趋势。
定位环装置也是重要的连接件,其功能主要基金项目:中国铁路总公司科技研究开发计划项目(2017J005-B)第一作者:韩宝峰(1980—),男,高级工程师。
E-mail:***************通信作者:张琦(1992—),男,工程师,硕士。
新型接触网腕臂组装工具

承力索底座装 反
双套筒连接器 装反
结构高度不准
组装不在 同一平面
装配时间 (分钟)
0
否
0
否
0
否
0
否
0
否
0
否
0
否
0
否
0
否
0
否
100%
否
否
否
否
否
否
否
否
否
否
否
否
否
否
否
否
否
否
否
否
平均时间
否
3
否
3
否
5
否
7
否
5
否
3
否
6
否
3
否
3
否
3
4.1
效果检查
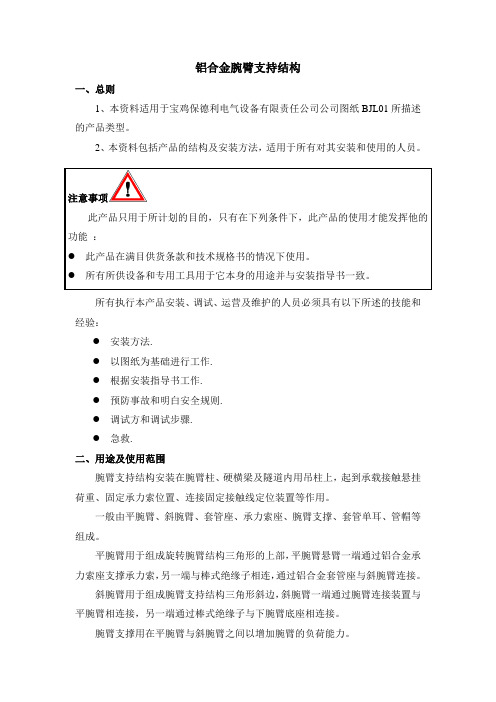
新型腕臂组装设备与传统腕臂组装错误率设备对照如下:
传统腕臂组装
4人
新型接触网腕臂组装工具结构示意图
2.加工组装
2015年4月-6月,崔中一、胡怀洲、戴泽浩在常州联系厂家加 工零部件,经过组装,实物如下。
加工完成后新型接触网腕臂组装工具实物图
(1)准备工作
3.现场试验
现场工器具摆放图
3.现场试验
(2)腕臂现场组装图
3.现场试验
(3)紧固需要对正部件 作业图
组装过程局部图片
成组装。
了装置稳定性的同时,提升了组装效率。
实用性 加工难易性
优点:腕臂组装快,组装质量高,装置简 单。
缺点:空间利用率低,安装精度不高,人 员组装不便利。
优点:占地面积小、工机具集中使 用、零部件紧固方便且准确、腕臂度量 准确,重要零部件装错率大大降低、大 幅度降低组装的时间。
检修腕臂支持装置—腕臂认识与分类(高铁接触网检修)

一、腕臂的作用、要求和分类
⑴绝缘腕臂 它是用外径48mm或60mm圆形热镀锌钢管经加工
而成,其根部通过棒式绝缘子与安设在支柱上的腕 臂底座相连,顶端经套管铰环、调节板、水平拉杆 (或压管)并通过悬式绝缘子串(或棒式绝缘子) 固定在支柱顶部水平拉杆底座处。当水平拉杆受压 时采用水平压管,悬式绝缘子改为棒式绝缘子。
二、腕臂支柱装配的参数
最小的结构高度必须满足最短吊弦(一般不小于 500mm)在最高温度时,其顺线路方向的偏角不超过 30°(全补偿链形悬挂不超过20°)。隧道内的结构 高度一般为450~550mm,不得低于300mm。
1 腕臂作用与分类
2 腕臂装配的几个重要参数
子
任
务
3 隧道内的几种支持结构
∆ 2.最大工作荷重:5.0kN、破坏荷重不小于15.0kN
➢ 3.维护及检修:
∆ 1.检查支撑管本体、双耳套筒本 体有无弯曲变形、锈蚀裂纹、 紧固螺栓有无松动等现象
∆ 2.通过双耳套筒本体上的小孔观 察支撑管本体是否处于套筒底 部
∆ 3.两个双耳套筒开档处应处于同 一平面上,不得形成交叉,
∆ 4.销钉应正确、开口销掰开至 120-130°5.顶紧螺栓应朝上方
➢ 优点:在不方便设立支柱时,作为跨线路腕臂使用。
压管
作用:本零件适用于在平腕臂上悬挂承力索
➢1.用途及组成:
∆本零件适用于电气化铁路接触网系统中平 腕臂上悬挂、固定双支或单支承力索
∆承力索座由压紧螺栓、止动垫片、承力索 座本体、铜铝衬垫、托线夹、盖板、顶紧 螺栓、背母组成
➢2.性能与机械参数:
➢ 由于直腕臂是水平设置的,在横线路方向有较大的调整范 围,在双线路区段及车站两端的双股道地段,由于地形限 制不宜设软横跨时,可采用直腕臂作2~3股道接触悬挂的 支持装置。
城市轨道交通接触网简单悬挂平腕臂拉线不受力分析
(1)
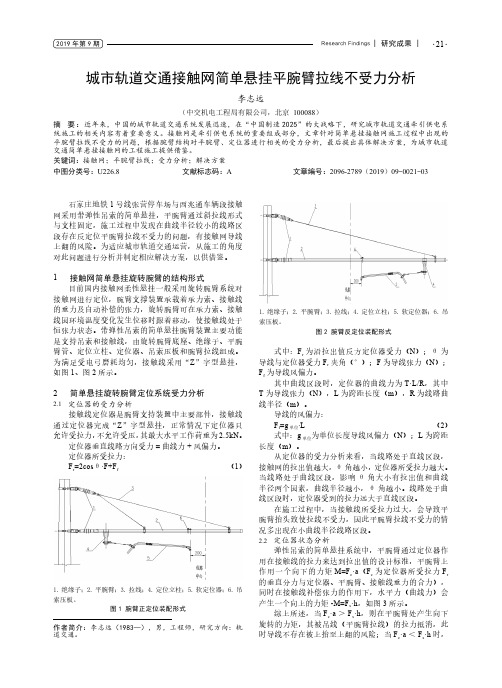
1. 绝缘子;2. 平腕臂;3. 拉线;4. 定位立柱;5. 软定位器;6. 吊 索压板。
图 1 腕臂正定位装配形式
作者简介:李志远(1983—),男,工程师,研究方向:轨 道交通。
1. 绝缘子;2. 平腕臂;3. 拉线;4. 定位立柱;5. 软定位器;6. 吊 索压板。
图 2 腕臂反定位装配形式
3 简单悬挂平腕臂拉线不受力原因 3.1 正定位情况
在正定位情况下,根据实际施工经验不存在接触导
4 解决方案
4.1 方案一
在保证设计线路曲线半径、设计接触网支柱跨距和
腕臂结构不改变的情况下,通过调整接触网的参数解决
平腕臂拉线不受力的问题。
(1)调整接触线拉出值,在保证受电弓动态包络
线的同时,尽量减小拉出值(石家庄地铁 1 号线此种情
2 简单悬挂旋转腕臂定位系统受力分析
2.1 定位器的受力分析
接触线定位器是腕臂支持装置中主要部件,接触线
通过定位器完成“Z”字型悬挂,正常情况下定位器只
允许受拉力,不允许受压,其最大水平工作荷重为 2.5kN。
定位器垂直线路方向受力 = 曲线力 + 风偏力。
定位器所受拉力:
Fr=2cosθ·F+Ff
长度(m)。
从定位器的受力分析来看,当线路处于直线区段,
接触网的拉出值越大,θ 角越小,定位器所受拉力越大。
当线路处于曲线区段,影响 θ 角大小有拉出值和曲线
半径两个因素,曲线半径越小,θ 角越小。线路处于曲
线区段时,定位器受到的拉力远大于直线区段。
在施工过程中,当接触线所受拉力过大,会导致平
腕臂抬头致使拉线不受力,因此平腕臂拉线不受力的情
2019 年第 9 期
2.3接触网结构—接触网支持装置
• 棒式绝缘子(水平绝 缘子)材质为瓷,型 号为QBN2 -25/12D • 主要用于水平腕臂与 支柱的绝缘。 • 端部与楔型连接器凹 槽配套并密帖,连接 螺栓紧固力矩符合要 求。另一端与水平腕 臂底座按要求连接, 螺栓穿向符合要求。
•
斜腕臂绝缘子
• 棒式绝缘子(斜腕臂绝 缘子) • 材质为瓷,型号为QBN3 -25/8D • 主要用于斜腕臂与支柱 的绝缘。 • 腕臂管端部插入绝缘子 端头套中,U型螺栓上 的压盖凸台正对铝管 Ф16孔,U型螺栓紧固 力矩符合要求;另一端 与斜腕臂底座按要求连 接,螺栓穿向符合要求。
55型环头定位环 • 55型、70型环头定位环,材质 为铝合金 50型安装在水平腕臂管上,用 于安装支撑管。与楔型连接器在 一个平面内,垂直向下安装,距 楔型连接器 20mm。 70型安装在斜腕臂管上,用于 安装支撑管。其边缘与定位环对 齐,与定位环在一个平面内,相 差 180°角(向上)。 55型承力索降高线夹(线卡), 材质为铝合金。螺栓直径: 12mm。螺栓紧固力矩:44N.m 用途是安装在 55型管上,在结 构高度降低时用于卡承力索。垂 直向下,处于受拉状态,一般管 端外露 50mm。
55型叉头连接器
组合承力索线夹(承力索旋转线夹)
• 合承力索线夹(承力索旋转 线夹),材质为铝合金70型 • 主要用于水平腕臂和斜腕臂 连接,并悬挂承力索,下方 的吊钩用于挂接斜拉线。 • 安装时组合承力索线夹夹持 在斜腕臂管上,斜腕臂管端 头留出150mm长,方向与腕臂 管另一端的Ф 16孔对应。与 叉头连接器用圆头销钉连接。 连接螺栓紧固力矩、穿向符 合要求。如果其挂钩挂斜拉 线,挂钩开口方向与斜拉线 方向夹角要大于 90°角。挂 承力索时,承力索上要安装 铜铝衬套。
• 55型楔形连接器材质为 铝合金5,主要于连接水 平腕臂和水平腕臂绝缘 子。 • 水平腕臂管套扣,楔形 连接器拧在端头上,方 向要与叉头连接器在一 个水平面上,连接牢固。 另一侧连水平腕臂绝缘 子。
11-腕臂装置

整体式腕臂安装使用说明书人员说明及要求:所有执行本产品安装、调试、及维护的人员必须具有以下所述的资格和经验:1、已经详细阅读本说明书下述的内容。
2、按照图纸或以图纸的相关要求为基础工作。
3、避免伤害及安全规则。
4、调试方法和调试步骤。
5、急救知识请参阅有关规范。
一、产品用途及说明用途:用于在铁路电气化铁道接触网系统中支撑、悬挂接触网。
本零件为整体式结构。
线路结构高度为950mm。
二、产品组成及示意图整体式腕臂装置由以下零部件组成:水平腕臂、斜腕臂、抱箍型定位环、腕臂支撑、定位管承力索座等组成。
本装置中不包含定位器装置。
整体式腕臂装置按照适用类型分为正定位腕臂装置、反定位腕臂装置和非工作支腕臂定位装置三种基本形式。
其基本结构如下图所示,但不限于此种形式(线路具体安装形式的选用以施工安装图为准):1.正定位腕臂结构示意图正定位腕臂装置,由下述产品组成:1.平腕臂 2.斜腕臂 3.整体式定位管 4.抱箍型定位环 5.承力索座2.反定位腕臂结构示意图反腕臂定位装置,由下述产品组成:1.平腕臂 2.斜腕臂 3. 承力索座4. 整体式定位管5.抱箍型定位环6.腕臂支撑3.非工作支腕臂定位装置结构示意图非工作支腕臂定位装置,由下述产品组成:1.平腕臂2.斜腕臂3. 承力索座4. 整体式定位管5.抱箍型定位环6.腕臂支撑三、机械性能腕臂系统整体机械性能:该参数为日本新干线接触网系统参数。
四、安装方法1、整体式腕臂的预配:1)每套整体式腕臂装置的水平腕臂、斜腕臂、腕臂支撑、定位管上面都刻有支柱号。
在预配之前对每根支柱的水平腕臂、斜腕臂、腕臂支撑、定位管与工点图上面设计尺寸进行复核。
根据工点图检查零部件是否齐全;检查零件是否有影响使用的质量缺陷或变形;检查紧固件之间的配合是否灵活。
2)尺寸复核无误及零件齐全后方可进行后续的预配安装。
2、平、斜腕臂的安装:1)平腕臂与斜腕臂通过焊接连接板连接,连接螺栓为两件M20X95的圆头螺栓销连接,拧紧螺母,并装配开口销,然后活动斜腕臂,观察斜腕臂在活动过程中是否有卡滞。
高铁接触网铝合金腕臂支持结构装配程序
铝合金腕臂支持结构一、总则1、本资料适用于宝鸡保德利电气设备有限责任公司公司图纸BJL01所描述的产品类型。
2、本资料包括产品的结构及安装方法,适用于所有对其安装和使用的人员。
所有执行本产品安装、调试、运营及维护的人员必须具有以下所述的技能和经验:●安装方法.●以图纸为基础进行工作.●根据安装指导书工作.●预防事故和明白安全规则.●调试方和调试步骤.●急救.二、用途及使用范围腕臂支持结构安装在腕臂柱、硬横梁及隧道内用吊柱上,起到承载接触悬挂荷重、固定承力索位置、连接固定接触线定位装置等作用。
一般由平腕臂、斜腕臂、套管座、承力索座、腕臂支撑、套管单耳、管帽等组成。
平腕臂用于组成旋转腕臂结构三角形的上部,平腕臂悬臂一端通过铝合金承力索座支撑承力索,另一端与棒式绝缘子相连,通过铝合金套管座与斜腕臂连接。
斜腕臂用于组成腕臂支持结构三角形斜边,斜腕臂一端通过腕臂连接装置与平腕臂相连接,另一端通过棒式绝缘子与下腕臂底座相连接。
腕臂支撑用在平腕臂与斜腕臂之间以增加腕臂的负荷能力。
铝合金套管座用于平腕臂和斜腕臂相交处的连接。
承力索座用于平腕臂上悬挂、固定双支或单支承力索。
套管单耳用于安装在平、斜腕臂上连接腕臂支撑。
管帽用于安装在腕臂端头防尘、防水保护。
三、材料腕臂管、支撑管采用牌号为EN AW-6082 T6的铝合金管。
销钉采用牌号为EN AW-6082的铝合金。
套管座本体、套管单耳本体、腕臂支撑用双耳套筒均采用牌号GK-AlSi7Mg0.3-T6的铸造铝合金;支撑线夹本体及托线夹、压块采用牌号GK-AlSi7Mg0.6-T6的铸造铝合金;衬垫采用T2/L3复合材料。
管帽采用PVC材料。
连接螺栓采用A2-70,顶紧螺栓采用A2-80,螺母、垫圈采用1Cr18Ni9(新牌号12 Cr18Ni9).四、设计和性能1、安装示意图套管单耳BJL0106平腕臂BJL0101腕臂支撑BJL010501套管座BJL0104承力索座BJL0103斜腕臂BJL0102管帽BJL010202. 腕臂预配步骤:2.1管材切割数据表中的数据是依据平腕臂、斜腕臂、定位管以及腕臂斜支撑管的长度计算得出的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
写成精练的矩阵形式:{f}=[k]{d} 其中{f}为节点力矢量,[k]为单元刚度矩阵, {d}为单元未知节点自由度或广义位移矢量。三维 梁单元的刚度矩阵为 12×12 阶对称奇异方阵。 (5)组装单元方程得出总体方程并引进边界 条件。可以应用直接刚度法将(4)得出的各个单 元方程加在一起得出整个结构的总体方程。 在直接 刚度法中所隐含的是连续和协调概念, 要求结构保 持完整,在结构任何一处不发生撕开。最后组装的 总体方程写成矩阵形式为{F}=[K]{d} 其中{F}为整体节点力矢量, [K]为结构总体刚 度矩阵, {d}为已知和未知节点自由度或广义位移。 总体刚度矩阵[K]是一个奇异矩阵,必须引入边界 条件使结构固定,不能作为一个刚体移动。 (6)解未知自由度(或广义位移) 。引入边界 条件后,形成一组联立代数方程组,写成扩展的矩 阵形式为
其中 n 是未知节点自由度的总数。 (7)求解单元应变和应力。根据应变位移和 应力应变关系得到单元应变和应力。 (8)解释结果。最后的目标是解释和分析用 于应力应变分析过程的结果。 在进行设计和分析决 策时, 确定结构中位移最大和应力最大的位置通常 是重要的。 后处理中计算机程序用图形显示的方式 帮助用户解释结果。
2
2.1
程序编制
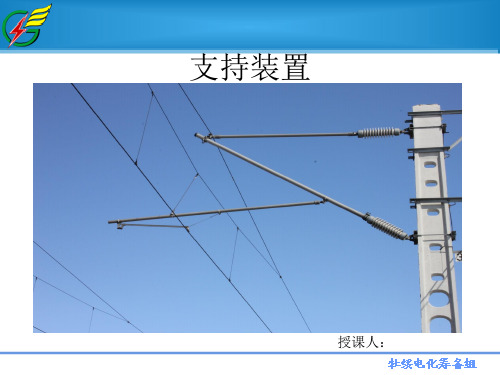
几何模型 腕臂结构的几何模型由若干个关键点的位置
坐标来描述, 故根据几何尺寸首先确定各关键点的 坐标,再进行相关点之间的连接以构成模型。在对 关键点编号与连线时, 应预先考虑有限元模型中节 点耦合的要求。 主要几何参数包括侧面限界 CX ,结构高度 Hsys,上下腕臂底座距离 Hb,绝缘子长度 Lins,定 位器长度 Ls, 腕臂管、 定位管、 绝缘子断面尺寸等。 腕臂结构的几何模型如图 1 所示。
a.正定位
时这也是 ANSYS 批处理分析的最高技术。在参数 化的分析过程中可以简单地修改其中的参数以达 到反复分析各种尺寸、 不同载荷大小的多种设计方 案或者序列性产品,极大地提高分析效率,减少分 析成本。 APDL 扩展了传统有限元分析范围之外的 能力,提供了建立标准化零件库、序列化分析、设 计修改、设计优化以及更高级的数据分析处理能 力。 程序按分析过程分 3 大部分: 第 1 部分为前处 理,根据几何参数建立几何模型,选择单元类型, 计算截面特性,建立有限元模型。第 2 部分为施加 约束与荷载,求解计算。第 3 部分为分析结果后处 理,绘制结构变形图,输出内力图(轴力、剪力、 弯矩) ,对结果进行分析。 几何参数与荷载参数均通过对话框输入。 程序 参数输入界面图略。
关键词:接触网;腕臂;支持结构;有限元;参数化;大秦线;京沪高速 Abstract: Introduces the compiling of horizontal type cantilever structure parametrization analysis program by finite
y
f1 k11 f 2 k21 f 32
k13 L k1n d1 k 23 L k2 n d 2 k33 L k3 n d 3 M M L knn d n
element method combined with ANSYS software. This program realizes the analysis and simulation of cantilever structure and simultaneously provides the tools and methods to establish load standard of components and to check the reliability of cantilever structure as well as to improve the stability of OCS suspension. With reference to actual construction of project, analyzes the feasibility of taking advantage of the existing cantilever structure of Datong-Qinhuangdao railway 200-million-ton heavy load electrification renovation project, providing a reference to determine the principle of taking advantage of the existing cantilever. Also carries out the parameter influence analysis of the cantilever structure adopted in the combination building scheme of OCS mast foundation and noise barrier layer in Beijing-Shanghai high speed railway, and provides the technical basis whether to use the combination building scheme.
0
前言
在接触悬挂系统中, 接触网腕臂支持结构的功
能是支撑、定位并承受机械与电气荷载作用。腕臂 结构的工作性能、 稳定性与可靠性直接影响接触悬 挂系统的稳定性与可靠性, 通过总体分析可以了解 两者之间的关系, 进而对腕臂结构进行优化设计以 提高稳定性,改善受流质量。因此对腕臂结构的精 确分析意义重大。 腕臂支持结构属于超静定结构, 为便于公式推 导和手工计算,以往分析时常将结构做一些简化, 如忽略套管双耳等连接件, 将承力索的荷载直接加 到平腕臂上,将接触线的荷载直接加到定位环上 等。这样做虽然可以推导出解析公式,但是比较繁 琐,计算结果不直观,且存在比较明显的问题,如
19
电气化铁道
2004 年第 6 期
有限元方法在建立公式和求解工程问题中的 一般步骤如下: (1)离散和选择单元类型。将物体划分为具 有相关节点的等价系统, 选择最适当的单元类型来 模拟最接近实际的物理性能。 所用的单元总数和给 定物体内单元大小和类型的变化是需要工程判断 的主要问题。腕臂结构可用线单元来模拟,本文采 用三维梁单元。 (2)选择位移函数。选择每个单元内的位移 函数,用于描述单元内各点的位移,它是用单元的 节点值在单元内部定义的。 (3)定义应变位移和应力应变关系。应力和 应变必须通过应力应变关系(通常叫做本构关系) 联系起来。 (4)推导单元刚度矩阵和方程。根据单元类 型可采用直接平衡法、功和能量法、加权残余法等 得到描述单元特性的刚度方程, 即节点位移与节点 力之间的关系。这些方程写成矩阵形式为
文献标识码: A
文章编号: 1007-936X(2004)06-0019-07 忽略连接件,则结构的几何尺寸与实际不一致,连 接件对腕臂管的附加弯矩未计入, 荷载作用位置与 实际有出入,这些均导致计算结果不准确,从而对 后续的设计分析造成不利影响。鉴于此,本文采用 有限元方法对腕臂结构进行分析,以期做到准确、 全面、直观、简便。
Key words: OCS; cantilever; support structure; finite element; parametrization; Datong-qinhuangdao line;
Beijing-shanghai high speed railway
中图分类号: U225.1
作者简介:刘峰涛.中铁电气化勘测设计研究院,高级工程 师,天津 300250,电话:022-26023417。
1
有限元方法的基本原理
有限元方法是解决工程和数学物理问题的数
值方法。 其基本思想是将连续的求解区域离散为一 组有限个数且按一定方式相互联结在一起的单元 组合体。 选择简单函数来近似地表示每个单元上真 实的位移分布和变化。 直接或通过变分原理建立每 个单元的平衡方程组, 将各个单元的方程按照保持 节点处位移连续性方式组合起来得到整个物体的 平衡方程,按给定的位移边界条件修改这些方程, 便得到未知位移,问题由此得到解决。
3
腕臂结构分析程序的功能
程序的分析功能包括静力分析、 模态分析和动
力时程分析, 做适当改进后也可进行疲劳分析和优 化设计。
b.反定位
3.1
静力分析 静力分析用于确定结构在静力载荷作用下的
响应,可以得到结构的位移、应力和内力。腕臂结 构静力分析结果见图 3。
a.位移图 图2 腕臂结构有限元模型
2.3 程序编制 采用 ANSYS 软件的参数化设计语言 APDL (ANSYS Parametric Design Language) 进行程序编 制。 APDL 是一种类似于 FORTRAN 的解释性语言, 提供一般程序语言的功能,如参数、宏、标量、向 量及矩阵运算、 分支、 循环、 重复以及访问 ANSYS 有限元数据库等, 是 ANSYS 的高级分析技术之一, 可以很好地用于实现参数化的有限元分析、 分析批 处理、专用分析系统的二次开发以及设计优化等。 利用 APDL 的程序语言与宏技术组织管理 ANSYS 的有限元分析命令,就可以实现参数化建 模、 施加参数化载荷与求解以及参数化后处理结果 的显示,从而实现参数化有限元分析的全过程,同
F1 K11 F2 K 21 F3 = K 31 M M K n1 Fn
K12 K 22 K 32 K n2
K13 L K1n d1 K 23 L K 2 n d 2 K 33 L K 3 n d 3 M M K n 3 L K nn d n
20
x y a 正定位
线 路 中 心
x b 图1 反定位
线 路 中 心
腕臂结构几何模型