深水半潜式平台系泊系统设计研究
深水半潜式钻井平台系泊系统方案设计与分析的开题报告

深水半潜式钻井平台系泊系统方案设计与分析的开题报告一、选题背景深水半潜式钻井平台是一种海洋工程设备,用于在海洋中进行石油钻探和开采等作业。
深海环境中,海浪、洋流、风力等自然因素易造成平台失稳和移动,影响钻井作业的正常进行。
为了解决这一问题,深水半潜式钻井平台需要设计一套系泊系统,以确保平台的稳定性和安全性。
系泊系统方案的设计和分析是该领域的研究热点之一。
二、研究内容本文旨在研究深水半潜式钻井平台系泊系统的方案设计和分析问题,具体研究内容包括以下几个方面:1. 系泊系统的功能和特点:探讨系泊系统在深水半潜式钻井平台中的作用和特点,揭示其在钻井作业中的重要性。
2. 系泊系统方案的设计:介绍深水半潜式钻井平台系泊系统的设计方法和流程,包括方案设计的原则、计算方法等。
3. 系泊系统方案的优化:探索系泊系统方案的优化方法,包括优化设计流程、优化系泊设备选型和工艺参数、提高系泊系统的效率等。
4. 系泊系统方案的分析:通过数值模拟或计算机仿真等手段,对系泊系统方案进行分析和评价,得出合理的成果,并进行验证和应用。
三、研究意义深水半潜式钻井平台系泊系统方案的设计和分析是保障深海石油勘探和开采作业安全和效率的关键。
本文的研究成果将为该领域的研究和应用提供理论和技术支持,为相关企业提供参考和指导。
四、研究方法本文将采用文献调研、方案设计、优化分析和数值模拟等方法进行研究。
首先,对深水半潜式钻井平台系泊系统的研究现状、发展趋势和关键技术进行文献综述和分析。
然后,基于系统工程原理和技术方法对钻井平台的系泊系统方案进行设计和优化。
最后,采用数值模拟软件对优化方案进行验证和应用。
五、预期成果本文的预期成果包括以下几个方面:1. 深入探讨深水半潜式钻井平台系泊系统的功能和特点,为深海石油勘探和开采提供理论基础。
2. 提出一套系泊系统方案设计和分析方法,包括设计原则、计算方法、优化策略等,为相关企业提供技术支持。
3. 通过数值模拟或计算机仿真,验证和应用系泊系统优化方案,为现场施工提供指导和保障。
深水半潜平台张紧式系泊系统耦合动力响应研究

Mooring
line schemes of different dip angle
张力响应的影响.计算0。、60。、900环境力方向,计算 结果见图5—8. 从上述数据可知,随着缆绳夹角口的增加,系泊 缆最大张力变大,平台最大水平偏移减小.随着缆绳 万方数据
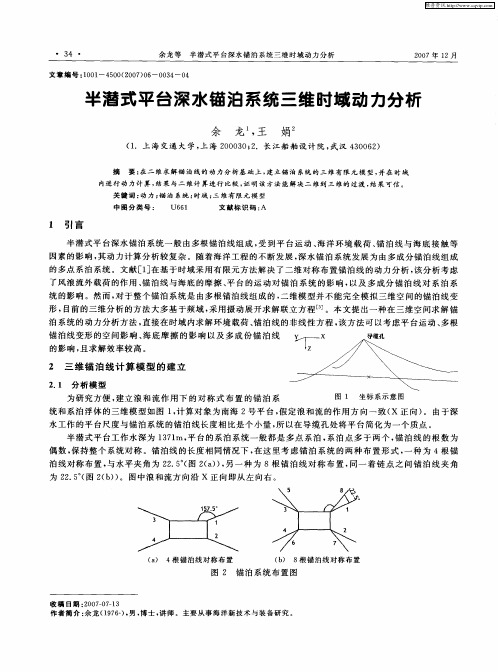
图2系泊缆编号及布置
Fig.2
平台的系泊缆张力和水平偏移最大,其原因是:在 600环境力方向上,平台的受风面积和受流面积均达 到最大值,受到很大的环境载荷;平台的环境力主要 由该方向上的NO.3系泊缆分担,系泊刚度相对较
弱.
Arrangement of the mooring line
and
angle
m,谱峰周期15.5 S,风谱采用API,平均风速
m/s.
590
m/s,表面流苏1.97
根据API
RP
115.0 78.4
1.3系泊系统初步设计 2SM规范u0|,设计每根缆索由3 部分组成:钢链、聚酯绳和钢链.各部分具体参数如 表2所示.缆索数目选择为8根,缆索对称布置,缆 绳夹角卢=22.5。,缆绳水平角度妒=45。,张力倾角 Ot=45。,顶端预张力为3500 kN,具体缆绳布置和角 度定义如图2所示.
b : R 激
4<
埘
暑 \
潍 堡 * 苌 K 略
图9最大张力随缆绳数目变化曲线
Fig.9
Magnum
tension VS.number of line
g \
图6最大水平偏移随缆绳夹角变化曲线
Fig.6
MAX
潞 堡
1}
horizontal dis.VS.intersection angel
深水半潜式钻井平台设计_建造关键技术探讨

30船艇Ships &Yachts·第266期·2·2007随着世界经济快速增长,石油、天然气需求快速增加,内陆和近海油田潜在资源日趋减少和枯竭,美国和其他工业大国早在20年前就把石油、天然气开采的目光投向了深远海。
我国政府也十分重视,在“十五”期间,国防科工委在高技术船舶科研计划中优先安排了“新型多功能半潜式钻井平台研制”科研项目,由上海外高桥造船有限公司和第七○八研究所承担,对深远海石油、天然气开发装置进行了较深入的研究。
“十一五”期间,国防科工委、国家科技部“863”计划再次投入研究经费,以我国南海油田的实质性开发项目为依托工程,对深远海油、气开发装备的关键技术进行更深入的研究。
本人参与了这些科研项目的立项和实施的管理工作,广泛地接触了我国有关的高等院校、中石油、中海油、石油装备研究所以及国外深水半潜式钻井平台方面的学者和专家,特别是,在深水半潜式钻井平台设计和建造领域的难点和关键技术作了十分深入细致的研究和探讨。
本文就针对这些技术问题作些学术讨论。
中国船舶工业集团公司第七○八研究所 奚立康目前世界上能在大于1500米水深进行深海钻探的装置只有钻井船和半潜式平台二种。
而半潜式平台性能更加优良:具有极强的抗风浪能力、巨大的甲板面积和装载量、适应更广的水深范围。
经过几十年的发展,目前全球共有约175座半潜式平台。
最新型的深水半潜式平台(第六代)的工作水深已超过3000米,钻井深度超过12000米,甲板可变载荷超过10000吨,作业系统高度自动化、智能化,并且出现了双井架的配置。
半潜式平台虽然被许多国家采用,但由于设计建造的技术密集和资金密集,世界上仅有少数国家能设计建造半潜式平台。
开发设计集中在美国、瑞典、荷兰和挪威等;日本、韩国和新加坡通过引进技术和设计图纸,已成为半潜式平台建造的主要承担者。
我国在上世纪80年代自主设计建造了工作水深200米的半潜式平台“勘探三号”;近年来建造了工作水深2000米的半潜式平台主体结构。
半潜式平台深水锚泊系统三维时域动力分析
l 引言
半 潜 式平 台深 水锚泊 系统一般 由多根 锚泊 线组 成 , 到平 台 运动 、 洋 环境 载 荷 、 泊 线 与海 底 接 触 等 受 海 锚
因素 的影 响 , 动力 计算 分析 较复 杂 。随着 海 洋工程 的 不断发 展 , 其 深水 锚泊 系统 发展 为 由多 成分 锚泊 线组 成
的多 点 系泊 系统 。文献 [ ] 基 于时域 采用 有 限元方 法解 决 了二 维对称 布 置锚泊 线 的动 力分 析 , 分 析考 虑 1在 该
了风 浪流 外载 荷 的作用 、 锚泊 线 与海底 的摩 擦 、 台的运 动 对锚 泊 系 统 的影 响 , 平 以及 多成 分 锚泊 线 对 系泊 系
量( 力、 力、 张 重 流体动 力及 海底 对其 的作 用 力) 。流 体 动力 由波 浪 和水流 的水 分子 的运 动及 节点 的运 动
引起 。利用 相 应 的运 动概 念 及 Morsn公 式 可 求 rio
解锚 泊 线 的流体 动力 。锚 泊线 的计 算参 数见 表 。 采 用 So e 五 阶波 浪理 论计 算锚 泊 系统 的 动力 , tk s 波浪 参 数 取 GOM1 0年计 算 标 准 , 即波 高 9 1 4 周 . 4 m,
余 龙 王 娟 ,
( .上 海 交通 大学 , 海 2 0 3 ; .长 江船 舶 设计 院 , 1 上 00 02 武汉 4 0 6 ) 3 0 2
摘 要 : 二 维求 解 锚 泊 线 的动 力 分析 基 础 上 , 立锚 泊 系 统 的 三 维 有 限 元 模 型 , 在 时 域 在 建 并
内进 行 动 力 计 算 , 结果 与二 维计 算进 行 比 较 , 明该 方 法 能 解 决二 维 到 三 维 的 过 渡 , 果 可信 。 证 结
半潜式钻井平台深水钻井系统的研究与设计
半潜式钻井平台深水钻井系统的研究与设计摘要:随着大量石油天然气资源在海底深层区域中被发现,使得深水半潜式钻井平台已经成为世界各国研究发展的重点。
考虑到钻井平台对其供配电系统安全性和连续供电的要求,选择合适的电网结构及其配置方案显得非常重要。
关键词:深水钻井设计研究随着海洋工程的飞速发展和在恶劣环境中对定位工作的更高要求,越来越多的船舶平台配置了先进的动力定位系统,且业主对作业的经济性和环保性要求越来越高,电力系统环网运行的必要性越来越明显。
因为环网的运行可减少投入电网的发电机台数,从而降低燃油消耗和对环境的污染,这就对配电系统的设计与对设备的保护提出了更高的要求。
1钻井系统设计流程以超深水钻井作业需求为目标,进行钻井系统中钻井模块、循环系统、固控系统等的关键参数匹配计算,完成钻井系统的配置选型,建立模块化动力系统、循环系统、固控系统等的性能和结构参数配置数据库。
结合超深水钻井隔水管在各工况下的力学行为分析,为钻井系统设备的选型、设计和操作提供理论依据。
以功能区模块规划、作业成本规划和降低平台质心等为优化策略,进行钻井系统的设备布置计算,完成钻井系统的布局设计。
开展钻井系统与钻井平台的接口体系分析研究,综合分析钻井系统与钻井平台或钻井船之间的人机接口、机电动力接口、智能接口、气液接口等,进行钻井系统电力模块、液压模块等的匹配分析和控制信道需求设计。
确定不同作业工况下各设备匹配时的电力、液压及控制信号等需求量,进行钻井系统输入接口与钻井平台输出接口的关联性分析,研究相互间的接口关系。
开展钻井系统输入接口与钻井平台输出接口的功能设计,包括动力接口、人机接口、气液接口等,研究通信接口协议与标准。
2钻井系统配置2.1概述海洋深水钻机用于作业水深大于500m的浮式海洋平台,深水钻机有三种形式:交流变频钻机、液压钻机和双列多功能塔钻机,其中双列多功能塔钻机是新型钻机。
由于深水钻机设备的功率大,且受到平台甲板载荷和甲板空间的限制,因此深水钻机多采用体积小且功率大的交流变频设备。
探讨深水半潜式钻井平台系统技术
探讨深水半潜式钻井平台系统技术随着全球经济的不断发展,人们对油气能源的需求量越来越大,陆地油气资源储量越来越少,因此人们加大了对海洋油气资源的开发和利用。
随着海洋石油开发技术的不断提高,人们开发海洋石油开始从近海浅水开发向远海深水开发的方向发展,为了有效开发深水石油,人们研制出了之中适合深水石油开发的技术,即深水半潜式钻井平台系统。
本文针对深水半潜式钻井平台系统的设计和使用方法进行分析,希望通过本文的分析能够进一步提高深水石油开发效率,满足人们对石油资源的需求。
标签:深水半潜式;钻井平台;系统技术随着海洋石油开发事业的不断发展,深海石油开发技术也在不断提高,尤其是对深水半潜式钻井平台系统的应用,不仅提高了深海石油开发效率,同时也使海洋深水石油开发事业得到了进一步的发展。
本文针对深水半潜式钻井平台系统的设计流程、特点以及系统配置进行分析,希望通过本文的分析能够进一步提高深水半潜式钻井平台系统的使用效率,保证深水石油开发工作的顺利开展。
一、深水半潜式钻井平台系统的设计在设计深水半潜式钻井平台时,应该将钻井模块设置在整个钻井平台的中心位置。
对于平台上的钻机,例如双井架钻机,可以将其放在双井架的中心位置,或者是以主转盘的中心位置为中心,将钻井放置在中央。
深水石油钻井作业中需要用到大量的水下工具,对水下工具进行下放和回收,因此可以月池设置在钻井平台的中部地区,方便钻井工作人员进行水下器具的使用。
除此之外,深水钻井作业还会用到泥浆泵、泥浆池以及防喷器等设备,这些设备应该统一放置到钻井平台上的船体内的专门用来放置设备的舱室内,方便对设备的储存和维护。
深水半潜式钻井平台上的钻井设备主要集中在平台上的上层和下层甲板区域,或者是钻台上的月池区域。
对于钻井平台管子堆场的长层甲板区域,可以放置各种各样的吊车设备,例如隔水管吊车、防喷器吊车,也可以将排管机和固控设备房安置在这个地方。
在钻井的钻台区域可以布置有钻台、仪表房、转盘以及泥浆防喷盒等设备。
半潜式平台的水动力及系泊系统性能研究

半潜式平台的水动力及系泊系统性能研究海洋能源、矿产等资源的大力勘探和开采促使了海洋工程领域的蓬勃发展,而半潜式平台以其抗风浪能力强、适应水深范围广、装载量大等优点,成为了海洋资源勘探开发的主流工具之一。
因此,对半潜式海洋平台进行水动力性能分析,计算平台在风浪流联合作用时的运动响应和系泊系统的张力响应,是尤为重要的。
本文以南海300米水深的某半潜式平台为对象进行水动力分析和系泊系统性能研究,在此基础上探讨了半潜式平台运动响应的影响因素。
论文的主要内容包括以下几个方面:1.在三维势流理论的基础上,利用ANSYS-AQWA软件,建立半潜式平台的水动力模型,计算分析平台的水动力性能,获得了附加质量、阻尼系数、运动响应幅值算子和波浪力等水动力参数。
2.根据作业水深和半潜式平台的特点,将平台的系泊系统初步设计为8根对称布置的悬链线式系泊系统。
再利用前章节计算的频域水动力结果,对半潜式平台和系泊系统在生存载况、作业载况,以及风浪流联合作用下进行时域耦合动力分析,计算了平台的响应历时曲线和系泊线的张力变化曲线。
3.进行模型试验验证研究,在频域和时域计算分析中各选取了一种典型工况,结合模型试验结果进行验证分析。
分析表明,在规则波中仿真计算和模型试验结果吻合度很高。
在复杂工况的时域分析中,虽然二者之间存在一定的误差,但依旧能较准确的预报出平台的运动响应和系泊性能。
因此,利用AQWA仿真计算平台的水动力性能具有可靠性和实用性。
4.在上述研究的基础上,通过数值计算分析的方法,探讨了半潜式平台运动响应的影响因素。
计算模型仍旧为原半潜式平台,分别计算了不同重心高度、吃水深度和是否带有垂荡板对平台运动响应的变化规律,为今后半潜式平台的优化设计提供一定的参考。
本文的研究内容对于使用AQWA仿真和模型试验来研究半潜式平台的水动力问题有一定的借鉴作用;同时,本文探讨的半潜式平台运动响应的影响因素,所得到结果对于半潜式平台的设计和结构优化具有一定的意义。
深水半潜式平台聚酯纤维系泊方案分析
深水半潜式平台聚酯纤维系泊方案分析赵晶瑞;谢彬;梁文洲;王世圣;粟京【摘要】基于某目标气田深水半潜式生产平台的动力特性,其系泊方案拟采用一套张紧型聚酯纤维系泊系统.根据ABS推荐方法,采用耦合动力学分析技术,对该系泊方案进行了强度与疲劳分析,研究了不同系泊刚度模型对校核结果的影响,并开展了环境条件、平台吃水及缆绳拖曳力系数等因素的敏感性分析.分析结果表明:在设计环境条件下,系泊系统的极限强度与疲劳寿命均可满足规范要求;相对于静动态刚度结合模型,上下边界刚度模型将产生更大的系泊张力与疲劳损伤;对于系泊缆绳强度而言,最不利环境条件是当谱峰周期取其标准值时,此外深水条件下系泊缆绳的黏性拖曳力系数对缆绳张力的影响较大.本文研究结果可为聚酯纤维应用于深水系泊系统提供参考.【期刊名称】《中国海上油气》【年(卷),期】2018(030)004【总页数】8页(P203-210)【关键词】深水半潜式生产平台;张紧型聚酯纤维系泊系统;静动态刚度结合模型;上下边界刚度模型;敏感性分析【作者】赵晶瑞;谢彬;梁文洲;王世圣;粟京【作者单位】中海油研究总院有限责任公司北京 100028;中海油研究总院有限责任公司北京 100028;中海油研究总院有限责任公司北京 100028;中海油研究总院有限责任公司北京 100028;中海油研究总院有限责任公司北京 100028【正文语种】中文【中图分类】P751某目标气田位于南海北部,离岸距离约150 km,水深约1 500 m,油藏较为分散。
根据前期勘探与开发配产结果,该油田拟采用半潜式生产平台加水下生产系统的开发模式。
由于该气田位于南海深水,环境条件恶劣,若采用传统的钢制悬链线系泊将占用平台大量储备浮力,导致平台尺度与造价的提升。
此外,钢制悬链线在深水条件下缆绳悬垂效应明显,导致总体回复力的降低,而且钢制悬链线系泊的材料与安装费也将随水深增加而大幅上涨。
因此,借鉴巴西[1-2]、墨西哥湾深水浮式平台系泊定位的成功经验[3-5],本项目拟采用聚酯纤维作为系泊缆绳材料进行方案设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(8)
0
式中,
HF
Hi
Fω,β
F,i=1,2,…,6 为对应于不同浪向角 β 的传递函数,通过线性插值规则波的计算结果
得到。
2.1.5 低频运动
在低频运动分析中,一般只考虑系泊浮体低频纵荡、横荡和艏摇运动,通过在频域范围内求解线
性方程
Mx咬
LF+Cx觶
LF
LF LF
+Kx =F
(9)
LF
LF
得到。 式中 x 和 F 分别为低频位置响应向量和低频载荷向量。 M 是浮体的质量矩阵,C 为 3×3 的阻
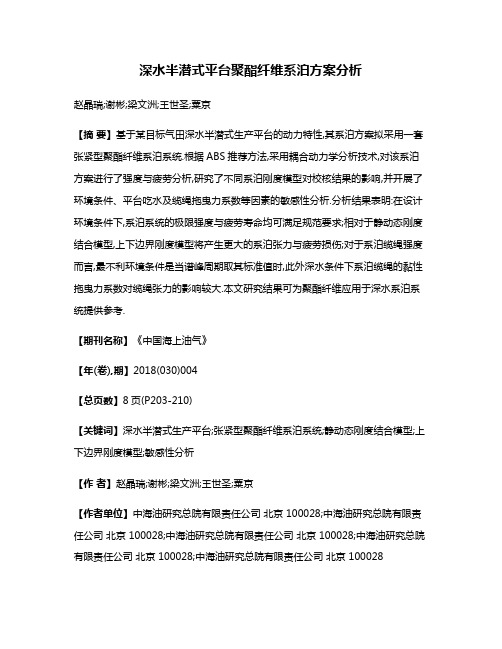
摘要: 随着海洋平台逐步向更深水域的发展,系泊系统设计成了深海平台开发的关键问题之一。 该文主要采用
时域计算方法对系泊系统进行动力响应分析,给出了深水半潜式平台系泊系统的基本设计方法,并对 2 000m 水
深的半潜式平台系泊缆索进行了 8 根与 12 根锚链线的系泊方案的对比分析,结果表明系泊方式不同,锚泊线的
系泊缆索的动力分析是研究在不定常外界环境诱导载荷作用下缆索系统的动力响应,以判断设计
的系统是否稳定,缆索的应力是否在许用应力范围之内,系泊系统能否满足特定的系泊要求等。 本文
就采用 DNV 锚泊规范作为系泊缆索是否安全的判别标准。 从锚链对平台的作用而言,锚链可看作是连
接在平台着链点上的一根非线性弹簧,整个系泊平台系统的计算模型可看作为由若干按一定方向布置
尼矩阵,K 为 3×3 的刚度矩阵。
LF
定义 SF 为 3×3 的低频波浪力和风力之和的能量谱密度矩阵,则相应的 3×3 的低频响应位移的能 量谱密度矩阵为
LF
Sx
Fω
F=H
LF
Fω
FSFLF
Fω
FH
LF
Fω
F*
(10)
式中
LF
H
Fω F= 乙-ω2M+iωC+K
-1
乙为矩阵转换函数。
2.2 系泊缆索的动力分析
波浪与系泊浮体之间的相互作用表现为三种力作用在系泊浮体上:(1) 以波浪频率振荡的一阶力,
它将引起一阶运动(也称波频运动和高频运动);(2) 以低于波频振荡的二阶力(也称缓变漂移力),它
将引起二阶运动(也称低频运动);(3) 二阶力中的定常部分(也称平均波漂力)。
浮体在波浪中的平均波漂力为
∞
乙 WD
498
船舶力学
第 14 卷第 5 期
的非线性弹簧支持的刚体运动体系,本文计算中分别模拟成 8 根非线性弹簧与 12 根非线性弹簧的刚 体运动模型,弹簧的刚度系数由静力分析得到。
半潜式平台的系泊系统一般由多根系泊线组成,本文中就用了 8 根系泊线与 12 根系泊线进行对 比 计 算 分 析 。 那 么 作 用 在 系 泊 线 上 的 力 有 水 动 力 [10]、重 力 以 及 系 泊 线 的 恢 复 力 等 ,具 有 明 显 的 非 线 性 特 征。 而系泊线的动张力解法分为时域求解方法 和 [11-13] 频域求解方法[14]两大类,本文在计算中重点采用 时域求解法。
本文中系泊缆索模拟成考虑锚链的惯性力与曳力的水动力模型,并且耦合半潜式平台的运动。 风 力、流力由规范计算得到,假定流是稳定的,风力采用 API 风谱。 锚泊线的阻尼采用线性计算,附加质 量力与阻尼力在时域内进行计算。
计算步骤如下: (1) 计算水动力系数,如附加质量,附加阻尼,一阶波浪激励力,波浪慢漂力系数以及平台的响应 幅值算子和运动。 (2) 用静态分析法进行计算,得出没有环境载荷条件下平台的平衡位置,以及锚泊线的锚泊张 力,导缆孔处锚泊线的角度和锚泊线半径。 (3) 采用准静态模拟进行分析;也就是说,把各瞬时的状态看作是相应的定常状态进行静力分 析,而不计入各种动力效应,并据此来确定系泊缆索在平均风力,曳力以及平均波漂力等作用下的平 衡位置,得到时域模拟的初始数据。 (4) 进行动力分析,即时域计算,本文对于自存状态与作业状态均采用持续 3 小时的时域模拟。 (5) 最后根据 DNV 规范判断平台的最大偏移量,以及锚泊线的最大张力是否符合要求。
第5期
周素莲等: 深水半潜式平台系泊系统 …
497
cu cu
次流力系数,v1 ,v2 为流的速度分量,v1,v2为浮体的纵荡和横荡速度。 流力系数也是从模型试验得到,但在初步设计阶段,可以忽略线性流力系数,根据经验公式计算
二次流力系数。 本文采用 API 规范[9]附录 A 中推荐的算法计算二次流力系数,即
Fi =
WD
2Ci
Fω,α
FS Fω Fdω
(7)
0
式中,i 取 1、2 和 6 分别表示纵向漂移力、
横
向
漂
移
力
和
摇
艏
漂
移
力
矩
WD
;Ci
Fω,α
F是 波 浪 相 对 于 浮 体
成 α 角时的波浪漂移系数,由规则波频域计算得到;S Fω F为海浪谱。 当波浪方向确定时,根据上式计算
每一个浪向下的漂移力并进行叠加,得到平均波漂力。
ZHOU Su-lian, NIE Wu, BAI Yong
(Department of Ship Building, Harbin Engineering University, Harbin 150001, China)
Abstract:With the development of the offshore platform used in deeper and deeper waters, the design of mooring system is one of the key issues in the exploitation of platforms for deepwater. In this paper, the dynamic response analysis of mooring system is solved in time domain, and a basic design method of deepwater semi-submersible platform mooring systems is presented. Then the comparative analysis of the mooring system in the depth of 2 000m, which has 8 and 12 mooring lines to position is carried out. The results show that the platform motion responses and the mooring line tensions are effected to some extent by the different mooring scheme. Key words: deepwater semi-submersible platform; time domain; dynamic response analysis;
析的前提。
2.1 半潜式平台所受的环境载荷与运动
2.1.1 风载荷
一般用静水面以上某一高度有关的平均速度来定义局部风速,常取 10m 作为标准高度。 已知风速
时,浮体受到的风力为
F軈
wi
=C
wi
軈α 軈V軍
2
(1)
式中,C wi 是随风向而变的风力系数,α 为风相对于浮体的方向,V軍为平均风速。
wi
2.1.2 海流载荷
已知流的速度时,浮体受到的流力为:
cu
cu
Fi =CLi
αβ αVrel+CQciu
αβ αV2rel
(3)
姨 α α α α Vrel=
cu
v1 -v1
2
+
cu
V2 -v2
2
(4)
2
α 軈 cu
tanβ=
v2 -v2
2
(5)
α 軈 cu
v1 -v1
cu
cu
式中,i=1,2,6,分别代表纵向流力、横向流力和艏摇流力矩;β 为流向角,CLi 为线性流力系数,CQi 为二
收稿日期: 2009-09-29
作者简介: 周素莲(1981-),女,哈尔滨工程大学船舶工程学院讲师,博士研究生,Email: lsczsl@; 聂 武(1944-),男,教授,哈尔滨工程大学船舶工程学院博士生导师,主要从事各种海洋工程结 构动态响应分析。
496
船舶力学
第 14 卷第 5 期
2 系泊系统动力分析
设计一个令人满意的深水半潜式平台的系泊系统是相当复杂的,因为它是非线性动力学的问题。
作用在半潜式平台上的环境载荷有振荡波力,还有比波频低得多的风、流和波浪漂移力。 这些近乎定
常的风、流和波浪漂移力会引起平台的自然位置移动,并在平衡位置由于波浪作用而振荡。 因而半潜
式平台在工作海域受到的环境载荷以及在波浪激励力和定常力共同作用下的运动是系泊系统设计分
the mooring scheme
1引 言
随着海上油气勘探和开采技术不断发展,海洋油气生产浮式结构的工作水深不断增长。 这些海上 结构通常主要采用两种定位系统[1]:系泊定位系统和动力定位系统。 由于系泊系统具有投资少、使用和维 修方便等特点,因而系泊系统是目前主要采用的定位系统,其广泛应用于半潜式钻井平台、钻井船以及 半潜式采油平台。 与其他工程问题一样,一种方法的选取及其有效性取决于其所采用的假定与真实情 况的符合程度。 系泊系统所受的载荷主要有自重、流力、波浪力等,可以根据不同情况得到不同的计算 模型来对其进行动力分析,对于系泊系统的动力分析目前已有学者进行了相关研究[2-8],其中肖越,王言 英[2]采用频时域相结合的方法分析了水深为 119.5m 的浮体运动响应与锚泊线张力。 童波,杨建民等[3]