笔记——LS-DYNA模拟中能量及其显示及单元与网格的区别
第11章 LS-DYNA自适应网格划分汇编
网格自适应 h-Adaptive
精确: 使用two-pass 方法
One pass 可选
LS-DYNA 网格自适应 — 网格细化 四边形单元细化 – 一级细化
三角形单元细化 — 一级细化
LS-DYNA 网格自适应 — 网格细化
网格细化中自适应级别由三条规则限制:
• 级别数由允许的最大自适应级别限制,一般设置为 3 或 4 • 网格自适应级别必须与邻近单元的自适应级别最多差别一个级别 • 总的单元树受到内存的限制,一旦内存容量不足,自适应终止
*CONTROL_ADAPTI总的角度相对于周围的单元改变: adpopt = 2 . 错误容限 = 0.1 度
. 细化级别: maxlvl = 2
*PART . blank (part 3) - h-adaptivity (adpopt = 1)
自适应网格粗化 在成型过程中小单元是必要的 • 在90°范围内至少4个单元才能有最好的回弹结果 • 在最佳的位置自适应网格产生单元 • 问题:在深冲压中侧壁的单元过多
自适应网格粗化
一新功能在发展,即在回弹前对自适应网格进行粗化 好处
• 速度
• 内存 缺点
• 丢失信息(精度?)
过程 • dynain文件
粗化能节省 CPU 时间,并无明显的精度损失
自适应网格粗化 精度考虑 统一的网格与自适应 + 粗化
LS-DYNA 关键字 *CONTROL_ADAPTIVE • 自适应时间间隔
• 类型
• 错误容限 • 细化级别
*CONTROL_ADAPSTEP
• 在自适应过程中控制接触界面力 *PART
• 激活自适应 parts
网格自适应
一边两分规则
LS-DYNA 理论及功能(简介)
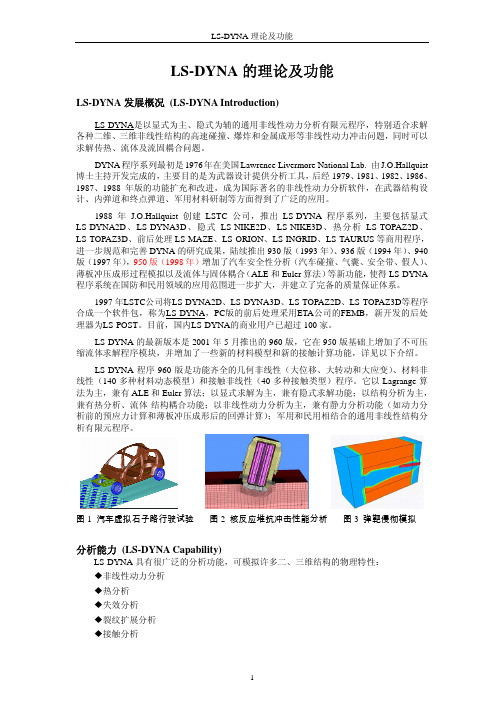
LS-DYNA 理论及功能LS-DYNA 的理论及功能LS-DYNA 发展概况 (LS-DYNA Introduction)LS-DYNA是以显式为主、隐式为辅的通用非线性动力分析有限元程序,特别适合求解 各种二维、三维非线性结构的高速碰撞、爆炸和金属成形等非线性动力冲击问题,同时可以 求解传热、流体及流固耦合问题。
DYNA 程序系列最初是 1976 年在美国 Lawrence Livermore National Lab. 由 J.O.Hallquist 博士主持开发完成的,主要目的是为武器设计提供分析工具,后经 1979、1981、1982、1986、 1987、1988 年版的功能扩充和改进,成为国际著名的非线性动力分析软件,在武器结构设 计、内弹道和终点弹道、军用材料研制等方面得到了广泛的应用。
1988 年 J.O.Hallquist 创建 LSTC 公司,推出 LS-DYNA 程序系列,主要包括显式 LS-DYNA2D、LS-DYNA3D、隐式 LS-NIKE2D、LS-NIKE3D、热分析 LS-TOPAZ2D、 LS-TOPAZ3D、前后处理 LS-MAZE、LS-ORION、LS-INGRID、LS-TAURUS 等商用程序, 进一步规范和完善 DYNA 的研究成果,陆续推出 930 版(1993 年)、936 版(1994 年)、940 版(1997 年),950 版(1998 年)增加了汽车安全性分析(汽车碰撞、气囊、安全带、假人)、 薄板冲压成形过程模拟以及流体与固体耦合(ALE 和 Euler 算法)等新功能,使得 LS-DYNA 程序系统在国防和民用领域的应用范围进一步扩大,并建立了完备的质量保证体系。
1997 年LSTC公司将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序 合成一个软件包,称为LS-DYNA,PC版的前后处理采用ETA公司的FEMB,新开发的后处 理器为LS-POST。
LS-DYNA常见问题及解决策略 (2012年11月7日)

LS‐DYNA基础
LS‐DYNA求解器
后处理软件
LS‐PREPOST HYPERVIEW ANSYS
2011/11/9
15
2011/11/9
16
湖南大学 汽车车身先进设计制造国家重点实验室
关键字文件
由前处理软件生成 *KEYWORD *END
基本概念
湖南大学 汽车车身先进设计制造国家重点实验室
2
湖南大学 汽车车身先进设计制造国家重点实验室
LS‐DYNA基础
湖南大学 汽车车身先进设计制造国家重点实验室
LS‐DYNA基础
基本情况
LS‐DYNA 是世界上最著名的通用显式动力 分析程序 能够模拟真实世界的各种复杂问题,特别 适合求解各种二维、三维非线性结构的高 速碰撞、爆炸和金属成型等非线性动力冲 击问题,同时可以求解传热、流体及流固 耦合问题 在工程应用领域被广泛认可为最佳的分析 软件包。与实验的无数次对比证实了其计 算的可靠性
SHGE Output shell hourglass energy density: EQ.1: off (default), no hourglass energy written, EQ.2: on.
29
2011/11/9
2011/11/9
30
5
2011/11/9
湖南大学 汽车车身先进设计制造国家重点实验室
LS‐DYNA求解器
支持单机和并行计算 支持Windows、Unix、Linux等系统 有32位、64位版本 有单精度、双精度版本
LS‐DYNA求解器
2011/11/9
13
2011/11/9
14
湖南大学 汽车车身先进设计制造国家重点实验室
LS-DYNA动力分析指南第七章练习笔记(新手记录)
LS-DYNA动力分析指南第七章练习笔记(新手记录)Aamlq7.1 FEMB前处理准备教程、初始文件totor.lin。
初始单位制为ton、mm、s、N。
按教程导入文件隐藏除W ALL外的其他层。
7.1.1划分网格A.刚性墙划分网格菜单ELEMENT---PLENT/SOLID MESH----4Line Plate,分别选取W ALL平面的四个边(从短边开始),输入网格数量10,15,10,15。
B.保险杠、平板、横杆划分网格将保险杠设置为当前层,菜单ELEMENT--- PLENT/SOLID MESH----TOPOLOGY MESH,选择Current Part,单元尺寸15mm。
分别设置平板、横杆为当前层,重复上述操作。
7.1.2定义相应材料菜单MATERIAL---creat—structural。
按图片输入相应数值,定义20.1和24.1两种材料。
注:弹塑性材料的杨氏模量如果输入2.07e+003计算时会出现错误提示,改成2.07e+004即可解决。
菜单MATERIAL---ASSIGN,刚性墙wall定义为刚性材料M-1,其余定义为M-2。
7.1.3定义单元属性菜单Property—Create—shell,按图片数值定义第一个特性,卡片1.1中积分点改为3个。
卡片1.2T1—T4输入第一个厚度值。
重复创建四个Property。
菜单Property—ASSIGN,四个part对应四个Property。
7.1.4定义接触A.保险杠与刚性墙接触菜单CONTACT—Create----3 Dimension中的*CONTACT_Automatic_Nodes_To_Surface卡片2.1先要选择TYPE类型,然后设置Master/Slave ID。
B.点焊连接层设置,仅显示平板和横杆。
菜单Part—Create,使用缺省值创建Part5。
设置当前层为Part5.菜单EMENT—Create—Spotweld,分别点击平板和横杆上对应的节点,创建焊点。
ANSYSLS-DYNA网格划分

ANSYSLS-DYNA网格划分ANSYS LS-DYNA结构冲击动力学分析专题培训学习心得——网格控制心得:本次培训最大的收获在于利用workbench进行模型的前处理方面,尤其是网格划分控制上,前期我们进行分析的主要网格划分方式多为系统自动划分,对于结构形式复杂的模型,很多时候都不太会对网格进行控制。
在三维网格划分方面主要有以下几个方式1. 四面体网格划分2. 扫略网格划分3. 多区网格划分4. 六面体为主网格划分5. 自动网格划分算法区别这些我们都有了解,而网格划分算法中的Patch Conforming 算法和Patch Independent 算法的区别却不太清楚,其主要差别在于Patch Independent 算法有较强的几何容忍度,小于某一给定尺寸的几何形状会被忽略,但同时也带来了计算精度有偏差的问题,如何均衡这两者的关系需要根据工程实例情况来进行区分。
对于单个模型的多次网格控制对于一个模型可以添加多个不冲突的网格控制,尺寸控制几乎可以跟任何一种划分方式合用,这样可以保证模型网格的规则性,也可以控制单元数量(因为在DYNA中,单元数量及最小单元尺寸与计算效率及计算精度关系非常密切)。
局部网格控制局部网格控制同样也是以尺寸控制为基础,用单元尺寸、线份数、影响球等手段来实现所关注的局部网格质量。
这个控制的合理应用可以提高计算的效率和精度。
在高级尺寸共功能上,打开调整曲率功能可以调整曲率法向角,细化转角处网格,还可以通过控制狭缝间的网格层数来对细微部分进行细化处理。
单元数量控制DANY的分析对单元数量很敏感,普通的双核CPU的计算机,计算400万单元的模型已经是极限,大型计算机的并行计算也需要进行合理的网格数量及尺寸的控制,另外不同的分析类型对网格质量的要求也不同。
运用DYNA进行碰撞模拟时多采用的是显示动力学分析的模式,这是因为一方面,计算收敛程度高,另一方面,计算结果更为精确,只是由于显式分析计算量大,对网格的质量要求就很高。
ls-dyna单元简介

ls-dyna单元简介LS-DYNA使用指南中文版本第2章单元(2012-04-05 11:25:53)转载▼标签:杂谈第二章单元在显式动态分析中可以使用下列单元:·LINK160杆·BEAM161梁·PLANE162平面·SHELL163壳·SOLID164实体·COMBI165弹簧阻尼·MASS166质量·LINK167仅拉伸杆本章将概括介绍各种单元特性,并列出各种单元能够使用的材料类型。
除了PLANE162之外,以上讲述的显式动态单元都是三维的,缺省时为缩减积分(注意:对于质量单元或杆单元缩减积分不是缺省值)缩减积分意味着单元计算过程中积分点数比精确积分所要求的积分点数少。
因此,实体单元和壳体单元的缺省算法采用单点积分。
当然,这两种单元也可以采用全积分算法。
详细信息参见第九章沙漏,也可参见《LS-DYNA Theoretical Manual》。
这些单元采用线性位移函数;不能使用二次位移函数的高阶单元。
因此,显式动态单元中不能使用附加形状函数,中节点或P-单元。
线位移函数和单积分点的显式动态单元能很好地用于大变形和材料失效等非线性问题。
值得注意的是,显单元不直接和材料性能相联系。
例如,SOLID164单元可支持20多种材料模型,其中包括弹性,塑性,橡胶,泡沫模型等。
如果没有特别指出的话(参见第六章,接触表面),所有单元所需的最少材料参数为密度,泊松比,弹性模量。
参看第七章材料模型,可以得到显式动态分析中所用材料特性的详细资料。
也可参看《ANSYS Element Reference》,它对每种单元作了详细的描述,包括单元的输入输出特性。
2.1实体单元和壳单元2.1.1SOLID164SOLID164单元是一种8节点实体单元。
缺省时,它应用缩减(单点)积分和粘性沙漏控制以得到较快的单元算法。
单点积分的优点是省时,并且适用于大变形的情况下。
ANSYS-LSDYNA笔记

ANSYS/LSDYNA 平时积累手册显式与隐式方法对比:隐式时间积分——不考虑惯性效应([C]and[M])。
——在t+△t时计算位移和平均加速度:{u}={F}/[K]。
——线性问题时,无条件稳定,可以用大的时间步。
——非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题无法保证收敛。
显式时间积分——用中心差法在时间t求加速度:{a}=([F(ext)]-[F(int)])/[M]。
——速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t——新的几何构型由初始构型加上{X}={X0}+{U}——非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。
关于文件组织:jobname.k——lsdyna输入流文件,包括所有的几何,载荷和材料数据jobname.rst——后处理文件主要用于图形后处理(post1),它包含在相对少的时间步处的结果。
jobname.his——在post26中使用显示时间历程结果,它包含模型中部分与单元集合的结果数据。
时间历程ASCII文件——包含显式分析额外信息,在求解之前需要用户指定要输出的文件,它包括:GLSTAT全局信息,MATSUM材料能量,SPCFORC节点约束反作用力,RCFORC接触面反作用力,RBDOUT刚体数据,NODOUT节点数据,ELOUT单元数据……在显式动力分析中还可以生成下列文件:D3PLOT——类似ansys中jobname.rstD3THDT——时间历程文件,类似ansys中jobname.his关于单元:ANSYS/LSDYNA有7中单元(所有单元均为三维单元):LINK160:显式杆单元;BEAM161:显式梁单元;SHELL163:显式薄壳单元;SOLID164:显式块单元;COMBI165:显式弹簧与阻尼单元;MASS166:显式结构质量;LINK167:显式缆单元显式单元与ansys隐式单元不同:——每种单元可以用于几乎所有的材料模型。
LS-DYNA简介
LS-DYNA简介LS-DYNA 简介LS-DYNA 是世界上最著名的通用显式动力分析程序,能够模拟真实世界的各种复杂问题,特别适合求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性动力冲击问题,同时可以求解传热、流体及流固耦合问题。
在工程应用领域被广泛认可为最佳的分析软件包。
与实验的无数次对比证实了其计算的可靠性。
由J.O.Hallquist主持开发完成的DYNA程序系列被公认为是显式有限元程序的鼻祖和理论先导,是目前所有显式求解程序(包括显式板成型程序)的基础代码。
1988年J.O.Hallquist创建LSTC公司,推出LS-DYNA程序系列,并于1997年将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序合成一个软件包,称为LS-DYNA。
PC版的前后处理采用ETA公司的FEMB,新开发的后处理为LS-POST。
LS-DYNA的最新版本是2001年5月推出的960版。
LS-DYNA功能特点LS-DYNA程序960版是功能齐全的几何非线性(大位移、大转动和大应变)、材料非线性(140多种材料动态模型)和接触非线性(50多种)程序。
它以Lagrange算法为主,兼有ALE和Euler算法;以显式求解为主,兼有隐式求解功能;以结构分析为主,兼有热分析、流体-结构耦合功能;以非线性动力分析为主,兼有静力分析功能(如动力分析前的预应力计算和薄板冲压成型后的回弹计算);军用和民用相结合的通用结构分析非线性有限元程序。
------------------------------------------------------------------------------LS-DYNA功能特点1.分析能力:¨非线性动力学分析¨多刚体动力学分析¨准静态分析(钣金成型等)¨热分析¨结构-热耦合分析¨流体分析:欧拉方式任意拉格郎日-欧拉(ALE)流体-结构相互作用不可压缩流体CFD分析¨有限元-多刚体动力学耦合分析(MADYMO,CAL3D)¨水下冲击¨失效分析¨裂纹扩展分析¨实时声场分析¨设计优化¨隐式回弹¨多物理场耦合分析¨自适应网格重划¨并行处理(SMP和MPP)2.材料模式库(140多种)¨金属¨塑料¨玻璃¨泡沫¨编制品¨橡胶(人造橡胶)¨蜂窝材料¨复合材料¨混凝土和土壤¨炸药¨推进剂¨粘性流体¨用户自定义材料3.单元库¨体单元¨薄/厚壳单元¨梁单元¨焊接单元¨离散单元¨束和索单元¨安全带单元¨节点质量单元¨ SPH单元4.接触方式(50多种) ¨柔体对柔体接触¨柔体对刚体接触¨刚体对刚体接触¨边-边接触¨侵蚀接触¨充气模型¨约束面¨刚墙面¨拉延筋5.汽车行业的专门功能¨安全带¨滑环¨预紧器¨牵引器¨传感器¨加速计¨气囊¨混合III型假人模型6.初始条件、载荷和约束功能¨初始速度、初应力、初应变、初始动量(模拟脉冲载荷);¨高能炸药起爆;¨节点载荷、压力载荷、体力载荷、热载荷、重力载荷;¨循环约束、对称约束(带失效)、无反射边界;¨给定节点运动(速度、加速度或位移)、节点约束;¨铆接、焊接(点焊、对焊、角焊);¨二个刚性体之间的连接-球形连接、旋转连接、柱形连接、平面连接、万向连接、平移连接;¨位移/转动之间的线性约束、壳单元边与固体单元之间的固连;¨带失效的节点固连。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GLSTAT(参见*database_glstat)文件中报告的总能量是下面几种能量的和内能internal energy动能kinetic energy接触(滑移)能contact (sliding) energy沙漏能hourglass energy系统阻尼能system damping energy刚性墙能量rigidwall energyGLSTAT中报告的弹簧阻尼能“Spring and damper energy”是离散单元(discrete elements)、安全带单元(seatbelt elements)内能及和铰链刚度相关的内能(*constrained_joint_stiffness…)的总和。
而内能“Internal Energy”包含弹簧阻尼能“Spring and damper energy”和所有其它单元的内能。
因此弹簧阻尼能“Spring and damper energy”是内能“Internal energy”的子集。
由SMP 5434a版输出到glstat文件中的铰链内能“joint internal energy”跟*constrained_joing_stiffness不相关。
它似乎与*constrained_joint_revolute(_spherical,etc)的罚值刚度相关。
这是SMP 5434a之前版本都存在的缺失的能量项,对MPP 5434a也一样。
这种现象在用拉格朗日乘子(Lagrange Multiplier)方程时不会出现。
与*constrained_joint_stiffness相关的能量出现在jntforc文件中,也包含在glstat文件中的弹簧和阻尼能和内能中。
回想弹簧阻尼能“spring and damper energy”,不管是从铰链刚度还是从离散单元而来,总是包含在内能里面。
在MATSUM文件中能量值是按一个part一个part输出的(参见*database_matsum)。
沙漏能Hourglass energy仅当在卡片*control_energy中设置HGEN项为2时才会计算和输出。
同样,刚性墙能和阻尼能仅当上面的卡片中RWEN和RYLEN分别设置为2时才会计算和输出。
刚性阻尼能集中到内能里面。
质量阻尼能以单独的行“system damping energy”出现。
由于壳的体积粘性(bulk viscosity)而产生的能量耗散(energy dissipated)在版本970.4748之前是不计算的。
在后续子版本中,设置TYPE= -2来在能量平衡中包含它。
最理想的情况下能量平衡:总能量total energy =初始总能量+外力功external work 。
换句话说,如果能量比率energy ratio(指的是glstat中的total energy/initial energy,实际上是total energy/(initial energy + external work)) 等于1.0。
注意,质量缩放而增加质量可能会导致能量比率增加。
注意在LS-prepost的History>Global energies中不包含删掉的单元(eroded elements)的能量贡献,然而GLSTAT文件中的能量包含了它们。
注意它们的贡献可以通过ASCII>glstat中的“Eroded Kinetic Energy”& “Eroded Internal Energy”来绘制。
侵蚀能量(Eroded energy)是与删掉的单元相关的内能和删掉的节点相关的动能。
典型来说,如果没有单元删掉“energy ratio w/o eroded energy”等于1,如果有单元被删掉则小于1。
删掉的单元与“total energy/initial energy”比率没有关系。
总能量比率增加要归于其它原因,比如增加质量。
重述一下,将一个单元删掉时,文件glstat中的内能和动能不会反映能量的丢失。
取而代之的是能量的丢失记录在glstat文件的“eroded internal energy”& “eroded kinetic energy”中。
如果用内能减去“eroded internal energy”将得到分析中还存在的单元的内能。
对动能也一样。
matsum文件中的内能和动能只包含余下(none roded)的单元的贡献。
注意,如果在*control_contact卡中将ENMASS设置为2,则与删掉的单元的相关的节点不会删掉,“eroded kinetic energy”是0。
在LS-prepost中History>Global 只是动能和内能的简单相加,因此不包含接触能和沙漏能等的贡献。
壳的负内能克服这种不真实效应的措施:a. 关掉考虑壳的减薄(ISTUPD in *control_shell)b. 调用壳的体积粘性(set TYPE=-2 (是-1吧!)在*control_bulk_viscosity卡中)c. 对在matsum文件中显示为负的内能的parts使用*damping_part_stiffness;先试着用一个小的值,比如0.01如果在*control_energy中设置RYLEN=2,因为刚性阻尼而能会计算且包含在内能中。
正的接触能当在接触定义中考虑了摩擦时将得到正的接触能。
摩擦将导致正的接触能。
如果没有设置接触阻尼和接触摩擦系数,你将会看到净接触能为零或者一个很小的值(净接触能=从边和主边能量之和)。
所说的小是根据判断在没有接触摩擦系数时,接触能在峰值内能的10%以内是可以被接受的。
负的接触能突然增加的负的接触能可能是由于未检测到的初始穿透造成的。
在定义初始几何时考虑壳的厚度偏置通常是最有效的减小负的接触能的方法。
负的接触能有时候因为parts之间的相对滑动而产生。
这跟摩擦没有关系,这里说的负的接触能是由法向接触力和法向穿透产生。
当一个穿透的节点从它原来的主面滑动到临近的没有连接的主面时,如果穿透突然检测到,则产生负的接触能。
如果内能为负接触能的镜像,例如glstat文件中内能曲线梯度与负的接触能曲线梯度值相等,问题可能是非常局部化的,对整体求解的正确性冲击较小。
你可以在LS-prepost中分离出有问题的区域,通过绘制壳单元部件内能云图(Fcomp > Misc > Internal energy)。
实际上,显示的是内能密度,比如内能/体积。
内能密度云图中的热点通常表示负的接触能集中于那里。
如果有多于一个的接触定义,sleout文件(*database_sleout)将报告每一个接触对的接触能量,因此缩小了研究负的接触能集中处的范围。
克服负接触能的一般建议如下a. 消除初始穿透(initial penetration)。
(在message文件中查找”warning”);b. 检查和排除冗余的接触条件。
不应该在相同的两个parts之间定义多于一个的接触;c. 减小时间步缩放系数;d. 设置接触控制参数到缺省值,SOFT=1 & IGNORE=1除外(接触定义选项卡C);e. 对带有尖的边的接触面,设置SOFT=2(仅用于segment-to-segment接触)。
而且,在版本970中推荐设置SBOPT(之前的EDGE)为4,对于部件之间有相对滑移的SOFT=2的接触。
为了改进edge-to-edge SOFT=2接触行为,设置DEPTH=5。
请注意SOFT=2接触增加了额外的计算开消,尤其是当SBOPT或者DEPTH不是缺省值时,因此应该仅在其它接触选项(SOFT=0或者SOFT=1)不能解决问题时使用。
另外,模型的细节可能会指示可用其它的一些方法。
网格和单元的基本概念无论是CSD(计算结构力学)、CTD(计算热力学)还是CFD(计算流体动力学)——我们统一称之为工程物理数值计算技术。
支撑这个体系的4大要素就是:材料本构、网格、边界和荷载(荷载问题可以理解为数学物理方程的初值问题),当然,如果把求解技术也看作一个要素,则也可以称之为5大要素。
网格是一门复杂的边缘学科,是几何拓补学和力学的杂交问题,也是支撑数值计算的前提保证。
本番连载不做任何网格理论的探讨(网格理论是纯粹的数学理论),仅限于尽量简单化的应用技术揭秘。
网格出现的思想源于离散化求解思想,离散化把连续求解域离散为若干有限的子区域,分别求解各个子区域的物理变量,各个子区域相邻连续与协调,从而达到整个变量场的协调与连续。
离散网格仅仅是物理量的一个“表征符号”,网格是有形的,但被离散对象既可以是有形的(各类固体),也可以是无形的(热传导、气体),最关键的核心在于网格背后隐藏的数学物理列式,因此,简单点说,看得见的网格离散是形式,而看不见的物理量离散才是本质核心。
对计算结构力学问题,网格剖分主要包含几个内容:杆系单元剖分(梁、杆、索、弹簧等)、二维板壳剖分(曲面或者平面单元)、三维实体剖分(非结构化全六面体网格、四面体网格、金字塔网格、结构化六面体网格、混合网格等),计算热力学和计算流体动力学的网格绝大部分是三维问题。
对于CAE工程师而言,任何复杂问题域最终均直接表现为网格的堆砌,工程师的任务等同于上帝造人的过程,网格是一个机体,承载着灵魂(材料本构、网格、边界和荷载),求解技术则是一个思维过程。
网格基本要素是由最基本的节点(node)、单元线(edge)、单元面(face)、单元体(body)构成,实质上,线、面、体只不过是为了让网格看起来更加直观,在分析求解过程中,线、面、体本质上并没有起多大的作用,数值离散的落脚点在节点(node)上,所有的物理变量均转化为节点变量实现连续和传递。
在所有的CAE环境下,网格的基本要素均可以直接构成,但对于复杂问题而言,这是一个在操作上很难实现的事情,因此,基于几何要素的网格划分技术成为现代网格剖分应用的支点,和网格基本要素完全相同,对应的几何要素分别称之为点(point)、线(curve)、面(surface)和实体(solid)。
数值离散求解器是不能识别几何元素的,要对其添加“饲料”,工程师必须对几何元素进行“精加工”,因此,从这个意义上来说,网格剖分的本质就是把几何要素转换为若干离散的元素组,这些元素组堆砌成形态上近似逼近原有几何域的简单网格集合体。
因此,这里说明了一个网格“加工”质量的基本判别标准——和几何元素的拟合逼近程度,理论上,越逼近几何元素的网格质量越好,当然,几何逼近只是一个基本的判别标准,网格质量判别有一系列复杂的标准,后文详细阐述。
本篇将专门解释几个基本概念:点网格;一维线网格;二维三角形面网格、二维四边形面网格;三维四面体网格(tetrahedra)、三维金字塔单元(pyramid)、五面体单元(prism)、三维六面体单元(hexahedra);结构化网格(structural grid)、非结构化网格(nonstructural grid)、混合网格(blend grid)。