平面机构的自由度教案.doc
第02章 机构的自由度
1.复合铰链 动副相联。
两个低副
--两个以上的构件在同一处以转
处理:m个构件,有m-1转动副。
2
1 3 2 1 2 3
1
2
1
2 3
1
2
1 3
3
3
例题④重新计算图示圆盘锯机构的自由度。
上例:在B、C、D、E四处应各有 2 个运动副。
D
5
作者:潘存云教授
F 6
解:活动构件数n=7 低副数PL= 10 F=3n - 2PL - PH =3×7 -2×10-0 =1
⑧计算图示大筛机构的自由度。
复合铰链
n= 7 Pl = 9
Ph = 1
A D B E’
C
局部自由度
E
F
G o
虚约束
F 3n 2Pl Ph 3 7 2 9 1 2
⑨计算图示包装机送纸机构的自由度。 分析: 活动构件数n:9 复合铰链: 2个低副 F 局部自由度 2个 E 5 G 虚约束: 1处 4
A C B 1 2
3
例题③计算铰链机构的自由度
B
1
A
2 3
2
1
4
C
3 1
2 5
3 4
(a)
(b)
(c)
F=0
F=1
F=2
机构具有确定运动的条件:原动件数=自由度。
三、机构具有确定运动的条件 原动件数=自由度。
简易冲床机构自由度
三、机构具有确定运动的条件
原动件数=自由度。 现设想将机构中的原动件和机架断开,则原动件与 机架构成了基本机构,其F=1。剩下的构件组必有F= 0。将构件组继续拆分成更简单F=0的构件组,直到不 能再拆为止。 F=0 F=1
平面机构的自由度

F 3n 2 pl ph 0
表明该运动链中各构件间已无相对运动,只构成了一个 刚性桁架,因而不能成为机构。
5)超静定桁架
图(b)所示的平面 四构件运动链,其自 由度
,
F 3n 2 pl ph 1
表明该运动链由于约束过多,已成为超静定桁架 了,也不能成为机构。
机构具有确定运动的条件 F=0(或F﹤0),是静定(超静定)桁架。 F>0,当F>主动件数目时,运动不确定。 当F﹤主动件数目时,机构发生破坏。
2
F 3n 2 PL PH 3 2 2 2 1 1
1
凸轮机构
计算图中机构的自由度。
解: n=5, PL=7 , PH=0
F=3n-2PL–PH=3×5-2×7-0=1
二、机构具有确定运动的条件 机构的主要作用是按照设计的要求完成预定的 运动传递或转换功能。 对于机构来说,必须满足以下两点:1、运动的 可能性,2、运动的确定性。 机构有确定运动是指当机构中主动件的位置确 定时,所有从动件的位置也都随之确定。
常见机构的自由度计算 1)四杆机构: n=3 PL=4 PH=0 F=3n-2PL-PH=3×3-2×4-0=1 2)五杆机构: n=4 PL=5 PH=0 F=3n-2PL-PH=3×4-2×5-0=2 3)凸轮机构:
3
n=2 PL=2 PH=1 F=3n-2PL-PH=1
2
1
4)刚性桁架
要使所设计的运动链成为机构,组成运动链的各构件之 间必须具有确定的相对运动。不能产生运动或作无规则运动 的运动链均不能成为机构。 如图(a)所示的平面三构件运动链,其自由度
注意: 法线不重合时, 变成实际约束!
n2 A n1
n1
说课教案(自由度的计算)

授课时间第次课,第周星期第节课时 2 授课方式理论课■讨论课□习题课□实验课□上机课□技能课□其他□授课题目§1-3 平面机构的自由度目的与要求1、掌握平面机构自由度的计算;2、掌握并会分析平面机构自由度计算的特殊情况(复合铰链,局部自由度,虚约束等特殊情况)重点与难点重点:自由度的计算难点:复合铰链、局部自由度和虚约束的判断教学基本内容方法及手段§1-3 平面机构的自由度为了使相互组合的构件能够产生确定的运动,必须研究机构自由度和机构具有确定运动的条件。
一、平面机构的自由度计算公式机构的自由度:构件相对于参考系的独立运动平面自由构件:3个自由度(如下图,3个自由度分别是两个轴向的独立运动和一个绕A点的转动)多个构件组成运动副后,自由度也随之减少。
1、引入转动副,限制了X和Y向的运动,即自由度减少2;引入移动副,限制了另一个方向的移动和转动,即自由度减少22、引入平面高副,限制了沿接触点处公法线方向的移动,即自由度减少1综上所述,引入一个平面低副,自由度减少2,;引入一个平面多媒体应用(三个不同的实例)高副,自由度减少1。
设平面机构中,有K 个构件,除了固定的构件,活动构件数为n=K-1,高副数为P H ,低副数为P L ,则该平面机构的自由度F 的计算公式为:)2(3H L P P n F +-=例 1-1 试计算下列机构的自由度 a)n = 3、p L = 4、p H = 0 F = 3n-(2p L + p H ) = 3×3-(2×4+0)=1b)n = 2、p L = 2、p H = 1 F =3n-(2p L + p H ) = 3×2-(2×2 +1)=1二、机构具有确定运动的条件 1、确定运动F=3×2-2×3=0 桁架 F=3×4-2×5=2 运动不固定F=3×3-2×4=1 有确定的运动通过引导学生,让学生分析出自由度计算的公式。
1 平面机构自由度
主要内容
§ 1-1
§ 1-2
运动副及其分类
平面机构运动简图
§ 1-3
平面机构的自由度
§1 机构组成原理
基本要求
掌握平面机构运动简图的绘制
掌握机构自由度计算
了解平面机构组成的基本原理 重点及难点 平面机构运动简图的测绘 平面机构自由度计算及注意事项
§ 1-1
运动副及其分类
低副限制二个自由度,高副限制一个自由度。
机构的自由度
构件组成机构后,机构所 具有的独立运动的个数
§ 1-3 平面机构的自由度
实例
1
2 4
3
如图四杆机构共有1、2、3、4共四个构件,除 去机架4,共有活动构件数为 3,未用运动副联接 前,这些活动构件的自由度总数为3×3=9,用运 动副联接起来组成机构后,各构件自由度减少了, 共有4个回转副共限制2×4=8个自由度。 故机构的自由度数目为F=3×3-2×4=1。
§ 1-1
运动副及其分类
高副( higher pair) 齿轮副 凸轮副 滚轮副
球面副
限制一个移动 自由度,保留 二个的自由度
§ 1-2 平面机构运动简图
1. 平面机构运动简图
(Kinematical Sketch of echanism)
用国标规定的简单符号和线条代表运动副 和构件,按比例作出的用以说明机构中各构件 之间相对运动关系的简单图形。
§ 1-3 平面机构的自由度
这种起重复限制作用的约束称为虚约束,在计 算机构自由度时,应当除去虚约束。
虚约束的存在对机构的运动没有影响,但引入 虚约束后可以改善机构的受力情况,可以增加机构 的刚性,因此得到较多的使用。
§ 1-3 平面机构的自由度
四讲 平面机构自由度
湖北职业技术学院备课纸《机械设计基础》教案教学内容:平面机构自由度教学方式:结合实际,由浅如深讲解教学目的:1.理解机构自由度的计算公式;2.明确平面机构具有确定运动的条件;3.清楚平面机构自由度计算应注意的问题;4.掌握平面机构自由度计算的实际应用。
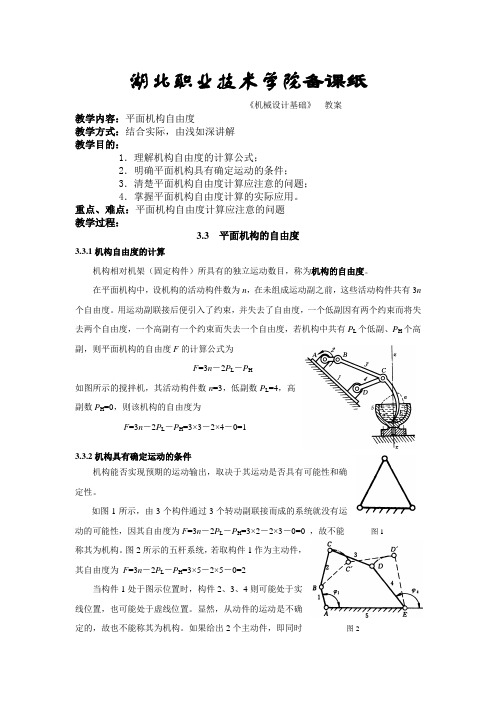
重点、难点:平面机构自由度计算应注意的问题教学过程:3.3 平面机构的自由度3.3.1机构自由度的计算机构相对机架(固定构件)所具有的独立运动数目,称为机构的自由度。
在平面机构中,设机构的活动构件数为n,在未组成运动副之前,这些活动构件共有3n 个自由度。
用运动副联接后便引入了约束,并失去了自由度,一个低副因有两个约束而将失去两个自由度,一个高副有一个约束而失去一个自由度,若机构中共有P L个低副、P H个高副,则平面机构的自由度F的计算公式为F=3n-2P L-P H如图所示的搅拌机,其活动构件数n=3,低副数P L=4,高副数P H=0,则该机构的自由度为F=3n-2P L-P H=3×3-2×4-0=13.3.2机构具有确定运动的条件机构能否实现预期的运动输出,取决于其运动是否具有可能性和确定性。
如图1所示,由3个构件通过3个转动副联接而成的系统就没有运动的可能性,因其自由度为F=3n-2P L-P H=3×2-2×3-0=0 ,故不能图1称其为机构。
图2所示的五杆系统,若取构件1作为主动件,其自由度为F=3n-2P L-P H=3×5-2×5-0=2当构件1处于图示位置时,构件2、3、4则可能处于实线位置,也可能处于虚线位置。
显然,从动件的运动是不确定的,故也不能称其为机构。
如果给出2个主动件,即同时图2给定构件1、4的位置,则其余从动件的位置就唯一确定了(图2实线),此时,该系统则可称为机构。
当主动件的位置确定以后,其余从动件的位置也随之确定,则称机构具有确定的相对运动。
那么究竟取一个还是几个构件作主动件,这取决于机构的自由度。
3月16平面机构的自由度
导学案专业科:机电 科目:机械基础 年级: 二年级备课节次:2 主备课:颜建国 二次备课:邓小慧要求:掌握四杆机构的基本特性重点:四杆机构的基本特性难点:四杆机构基本特性的应用方法:讲解、多媒体课时:2课时基本理论:1.急回特性:用行程速比系数K 表示,它与极位夹角θ的关系是K=θθ-+18001800只要θ>0,总有K>0。
机构存在急回特性的条件:θ>0或 K>0;以曲柄为原动件的机构。
2.压力角和传动角:从动件上点的速度方向和受力方向所夹的锐角,称为该点的压力角,是判别机构传力性能的主要参数,用α表示,压力角越大,其传力性能越差。
传动角γ:压力角的余角,是判别机构传力性能的重要参数,对于一般机器,[γ]≥400,对于高速重载机器[γ]≥500。
曲柄摇杆机构的γmin 将出现在曲柄与机架共线的两个位置之一。
3.死点位置:曲柄摇杆机构中,若以摇杆为主动件时,当从动曲柄与连杆共线的两个位置时,机构出现γ=0,从动曲柄出现不动或运动不确定的现象,称为死点位置。
可采用惯性或机构错位排列或直接使用外力使机构顺利通过死点位置。
基础知识检测1.若以曲柄摇杆机构的曲柄为主动件,并且匀速转动,那么,它在回转一周中有次与连杆共线,这时分别位于两位置,机构在这两个位置时所夹的锐角称为。
2.曲柄摇杆机构处于“死点”位置时,作主动件的是()A、连杆, B、曲柄, C、机架, D、摇杆。
3.会出现运动不确定的机构是()A、等腰梯形机构,B、平行双曲柄机构,C、曲柄摇杆机构,D、双摇杆机构。
4.只要曲柄与连杆共线,曲柄摇杆机构处于“死点”位置。
()5.凡是铰锭四杆机构都有急回特性。
()6.何谓急回运动?7.何谓行程速比系数?8.什么是曲柄连杆机构的死点位置?高考试题选录1.曲柄摇杆机构中,机构工作件的大于的特性称为机构的急回特性。
2.当机构处于死点位置时,其压力角为900。
()3.图示铰链四杆机构中,a=15cm,b=45cm, c=40cm,d=30cm,以d 为机架,该机构为机构;在图中标出各构件的名称,在图中画出该机构在图示位置的瞬时压力角。
平面机构的自由度
1、三角形具有稳定性。 2、四边形具有不稳定性。
引入:三角形与四边形
教学引入 教学策略
教学练习
教学效果
“用三根木条钉成 三角形的木架,然 后扭动它,它的形 状会发生变化吗?” “不会变形”
引入:三角形与四边形
教学引入 教学策略
教学练习
教学效果
“然而,用四根木 条钉成四角形的木 架,然后扭动它, 它的形状会发生变 化吗?” “变形”
Part
3
教学练习
课前学习
教学流程 教学实施过程
平面机构自由度的计算
教学引入 教学讲解
教学练习
教学效果
1、三角固定架(刚性桁架)
F = 3n - 2 Pl - Ph
1 2
F=3×2-2×3=0 构件间没有相对运动 机构→刚性桁架
固定构件
2、铰链四杆机构
一个原动件
F = 3n - 2 Pl - Ph
(F﹥0)
原动件数=机构自由度
运动确定
平面机构自由度的计算
教学引入 教学讲解
教学练习
教学效果
2、铰链四杆机构
两个原动件
F = 3n - 2 Pl - Ph
(F﹥0)
原动件数>机构自由度
运动不确定
3、铰链五杆机构
F = 3n - 2 Pl - Ph
(F﹥0)
原动件数<机构自由度
运动不确定
平面机构自由度的计算
构件间具有确定的相对运动关 机构具有确定运动的条件: 系的构件组合体,称为机构。 自由度 F > 0 , 且等于原动件个数。
Part
4
教学效果
教学效果 教学反思
习题练习:
教学引入 教学讲解
《平面机构自由度》课件
在计算平面机构自由度时,需要考虑局部自由度对整体自由度的影响。如果忽略 了局部自由度,可能会导致自由度计算错误。
平面机构自由度计算中的注意事项
01
正确理解约束和自由度的关系
约束和自由度是相对的概念,一个约束可以减少一个自由度。在计算自
由度时,需要正确识别和计算约束的数量。
02
注意机构的连接方式
机构的连接方式会影响其运动性质和自由度的数量。例如,不同连接方
式的连杆机构会有不同的自由度数。
03
考虑机构的实际工作状态
在某些情况下,机构在特定的工作状态下可能表现出不同的自由度数。
因此,在计算平面机构自由度时,需要考虑其实际工作状态。
04
平面机构自由度在机械设 计中的应用
机构运动分析中的应用
未来研究的方向与展望
01
02
03
04
发展更为精确、高效的平面机 构自由度计算方法,以适应各 种复杂机构的自由度分析需求
。
深入研究平面机构自由度与机 构性能之间的关系,为机构优
化设计提供理论依据。
探索平面机构自由度的实验验 证方法,提高研究的可重复性
和可推广性。
将平面机构自由度的研究成果 应用于实际工程中,促进相关
用提供理论支持。
平面机构自由度的研究有助于 推动机构学理论的完善和发展 ,促进相关领域的技术进步和
创新。
当前研究的不足与挑战
平面机构自由度的计算方法仍不够完善,对于某 些复杂机构的自由度分析仍存在困难。
平面机构自由度与机构性能之间的关系尚不明确 ,需要进一步深入研究。
平面机构自由度的实验验证方法有待发展,以提 高研究的可靠性和实用性。
分类
平面机构的自由度教案
平面机构的自由度教案第一章:平面机构的基本概念1.1 平面机构的定义介绍平面机构的定义和特点解释机构的作用和应用1.2 平面机构的组成介绍平面机构的组成要素,包括构件和连接解释不同类型的构件和连接方式1.3 平面机构的分类介绍平面机构的分类,包括单自由度机构和多自由度机构解释不同类型平面机构的特点和应用第二章:自由度的概念2.1 自由度的定义介绍自由度的概念和意义解释自由度在机构设计中的重要性2.2 自由度的计算介绍自由度的计算方法和步骤解释如何确定机构中自由度的数量2.3 自由度与约束的关系介绍自由度与约束之间的关系解释如何通过约束来控制机构的运动和稳定性第三章:平面机构的自由度计算3.1 单自由度机构的自由度计算介绍单自由度机构的自由度计算方法解释如何确定单自由度机构的自由度数量3.2 多自由度机构的自由度计算介绍多自由度机构的自由度计算方法解释如何确定多自由度机构的自由度数量3.3 自由度计算的实例分析提供实例分析,帮助学生理解和应用自由度计算方法第四章:自由度对机构运动的影响4.1 自由度与机构运动的关系介绍自由度对机构运动的影响和作用解释不同自由度机构的特点和运动方式4.2 自由度对机构稳定性的影响介绍自由度对机构稳定性的影响和作用解释如何通过自由度来控制机构的稳定性和可靠性4.3 实例分析:自由度对机构运动和稳定性的影响提供实例分析,帮助学生理解和应用自由度对机构运动和稳定性的影响第五章:自由度在机构设计中的应用5.1 自由度在机构设计中的作用介绍自由度在机构设计中的重要性和应用价值解释如何利用自由度来优化机构设计和提高性能5.2 自由度在机构创新中的运用介绍自由度在机构创新中的作用和意义解释如何利用自由度来创造新的机构设计和解决方案5.3 实例分析:自由度在机构设计中的应用提供实例分析,帮助学生理解和应用自由度在机构设计中的应用第六章:平面机构的自由度分析方法6.1 机构自由度分析的基本原理介绍机构自由度分析的基本原理和数学基础解释如何应用这些原理来分析平面机构的自由度6.2 运动链分析法介绍运动链分析法的概念和步骤解释如何利用运动链分析法来确定机构的自由度6.3 机构自由度分析的实例提供实例分析,帮助学生掌握自由度分析的方法和技巧第七章:平面机构的自由度优化设计7.1 自由度优化设计的目标介绍自由度优化设计的目标和意义解释如何在机构设计中实现自由度的优化7.2 自由度优化设计的方法介绍自由度优化设计的方法和技巧解释如何应用这些方法来提高机构的性能和效率7.3 实例分析:自由度优化设计在实际中的应用提供实例分析,帮助学生理解自由度优化设计的方法和应用第八章:平面机构的自由度控制8.1 自由度控制的概念和意义介绍自由度控制的概念和意义解释自由度控制在机构设计和应用中的重要性8.2 自由度控制的方法和技巧介绍自由度控制的方法和技巧解释如何应用这些方法来控制机构的自由度8.3 实例分析:自由度控制在实际中的应用提供实例分析,帮助学生理解自由度控制的方法和应用第九章:平面机构的自由度综合应用9.1 自由度在机构设计中的应用介绍自由度在机构设计中的应用和意义解释如何利用自由度来优化机构设计9.2 自由度在机械臂机构设计中的应用介绍自由度在机械臂机构设计中的应用和意义解释如何利用自由度来优化机械臂机构设计9.3 实例分析:自由度在机构综合应用中的实例提供实例分析,帮助学生理解自由度在机构综合应用中的方法和技巧第十章:平面机构的自由度教案总结10.1 平面机构自由度教案的回顾回顾整个教案的内容和重点强调平面机构自由度的重要性和应用价值10.2 平面机构自由度教案的实践应用鼓励学生将所学知识应用到实际机构和机械设计中强调平面机构自由度在实际工程中的重要性10.3 平面机构自由度教案的拓展学习推荐学生进一步学习的资料和资源鼓励学生探索平面机构自由度在更广泛领域中的应用重点和难点解析一、平面机构的基本概念:理解平面机构的定义、组成和分类是学习平面机构自由度的基础。
平面机构的自由度
3.3 平面机构的自由度3.1.1 平面机构的自由度由前述已知,一个作平面运动的自由构件具有三个自由度。
若一个平面机构共有n个活动构件。
在未用运动副联接前,则活动构件自由度总数为3n。
当用运动副将这些活动构件与机架联接组成机构后,则各活动构件具有的自由度受到约束。
该机构中有P L个低副,P H个高副,则受到的约束,即减少的自由度总数应为2P L+P H。
因此,该机构相对于固定构件的自由度数应为活动构件的自由度数与引入运动副减少的自由度数之差,该差值称为机构的自由度,并以F表示,F=3n-2P L-P H由上式可知,机构要能运动,它的自由度必须大于零。
机构的自由度表明机构具有的独立运动数目。
由于每一个原动件只可从外界接受一个独立运动规律(如内燃机的活塞具有一个独立的移动)因此,当机构的自由度为1时,只需有一个原动件;当机构的自由度为2时,则需有两个原动件。
故机构具有确定运动的条件是:原动件数目应等于机构的自由度数目。
例试计算图示航空照相机快门机构的自由度解:该机构的构件总数N=6,活动构件数n=5,6个转动副、一个移动副,没有高副。
由此可得机构的自由度数为:F=3n-2P L-P H=3×5-2×7-0=1例试计算图示牛头刨床工作机构的自由度。
解:该机构的构件总数N=7,活动构件数n=6,5个转动副、3个移动副,1个高副。
由此可得机构的自由度数为:F=3n-2P L-P H=3×6-2×8-1=13.1.2 计算机构自由度时应注意的几种情况1.复合铰链2.局部自由度这表明要有两个原动件,该机构的运动才能确定。
事实上当凸轮1作为原动件转动时,从动件3就具有确定的运动,即表明该机构的自由度为1。
多余的自由度是滚子2绕其中心转动带来的局部自由度,它并不影响整个机构的运动,在计算机构的自由度时,应该除掉。
若把滚子2与杆件3焊为一体,则杆件的运动与滚子不与它焊成整体的运动完全一致。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机构具有确定运动的条件是:机构的原动件数目应等于机构的
自由度数目且F〉0。
具体ppt举例讲解
三、计算机构自由度时应注意的问题
对于大多数机构,可以依据机构运动简图直接运用公式进行自由度的计算。但 在计算机构的自由度时,往往会遇到按公式计算出的自由度数门与机构实际的自由度 数目不相符合的情况。其实,这不是自由度的计算公式有什么错误,而是在应用公式 计算机构的自由度时,还有一些应该注意的事项未能正确考虑的缘故。
则其自由度为:F= 3n一2PL- PH
解释公式:
3n一一个构件有3个自由度,n个活动构件有3n个自由度。
2PL个低副引入两个约束,PL个低副引入2PL个约束。
PH个高副引入一个约束,PH个高副引入PH个约束具体ppt讲解二、机构具有确定 Nhomakorabea动的条件
1、自由度F > 0时,原动件数小于机构的自由度,各构件没有确定的相对运动, 原动件数大于机构的自由度,则在机构薄弱处遭到破坏。
新课导入:
机构的自由度是指机构中各构件相对于机架的所能有的独立运动的数目。
这节课我们主要讨论对平面机构的自由度计算问题
讲解新课:
§ 1-3
一、平面机构的自由度计算
机构的自由度与组成机构的构件数目,运动副的类型及数目有关。设机构中有
K个构件,其中活动构件数为n二KT; PL个低副,PH个高副,
教学过程:
然后反过来可提出:既然机构是由若干个基本杆组依次联接到原动件和机架上构成 的,所以对现有机构进行分析时就可以把机构分解成原动件、机架和若干个基本杆组, 从而对机构进行结构分类,以便对同样的杆组可采用通用的方法进行运动分析和力分 析。这就是“机构结构分析”所研究的内容。主要是结合实例讲解机构结构分析
机构是人为构件的组合体,且构件数在3件以上;组成机构的构件之间具有确 定的相对运动。
3、机构运动简图的绘制方法?
1)、分析机构,观察各构件间的相对运动,找出所有的构件(数目)与运动副(类 型和数目)
2)、选择投影面和比例尺。
3)、确定比例尺
4)、用规定的符号和线条绘制成简图。(从原动件开始画)
5)、标注
日期:2011年10月11日
课题:§ 1-3平而机构的IH由度;§ 1-4机构的组成
H的要求:1、理解自由度、杆组、机构级别等基本概念;2、能计算平面机构的自 由度,判定机构具有确定运动的条件3、几种醇殊结构的处理(复合钗链、局部自由度、虚约束)4、了解机构的组成原理。
重点、难点:重点:平面机构自由度的计算
难点:虚约束是一个难点,但不作为重点,只要求学生对一些常见
的情况有所了解
教具、实验及教学手段:多媒体ppt课件讲解为主,提问为辅。
作业布置:
教学反映:
课后分析:
教学过程:
复习
1、什么是机器呢?
是人为实物的组合体,具有确定的机械运动,可以用来转换能量、完成有用功 或处理信息,以代替或减轻人的劳动。
2、什么是机构呢?
具体ppt举例讲解
3虚约束
在特定的几何条件下,有些约束所起的限制作用是重复的。这种不起独立限制 作用的约束称为虚约束。在计算机构自由度时,虚约束应*除去不计(发生在轨迹重 合、距离不变、对称部分)。
具体ppt举例讲解
§1-3
首先提出:机构是由若干个构件通过运动副联接而构成的,用于进行运动、力的 传递及变换,机构需具有确定的运动。那么当构件组成机构时,有没有什么规则可循 呢?这就是“机构的组成原理”所研究的问题。教学过程为:先讲解高副低代概念, 讲清楚瞬时性,后引出“杆组”概念,介绍各类杆组,并通过分析得出结论:“机 构是由若干个基本杆组依次联接到原动件和机架上而构成的”O
1.复合钗链
当两个或两个以上的转动副轴线重合,在与轴线垂直的视图上,只能看到一个车交链, 该皎链称之为复合皎链。这一皎链往往被错当成一个转动副来计算。因此必须加以 注意,由M个构件汇成的复合皎链应当按T个转动副计算。具体ppt举例
教学过程:
讲解
2、局部自由度
局部运动并不影响其他构件的运动。这些构件所产生的这种局部运动的自由度称为局 部自由度。在计算机构自由度时,局部自由度应略去不计。