小地区控制测量
小区域控制测量

第五章小区域控制测量6.1 控制测量概述为了减少测量工作中的误差累计,应该遵循三个基本原则:“从整体到局部、由高级到低级、先控制后碎部”。
这几个基本原则说明我们的测量工作是首先建立控制网,进行控制测量,然后在控制网的基础上再进行施工测量、碎部测量等工作。
另外这几个基本原则还有一层含义:控制测量是先布设能控制一个大范围、大区域的高等级控制网,然后由高等级控制网逐级加密,直至最低等级的图根控制网,控制网的范围也会一级一级的减小。
如图,要测量图上的这块区域,可以现在测区的范围内选定一些对整体具有控制作用的点,称为控制点。
这些控制点组成了一个网状结构就称为控制网,为建立控制网所进行的测量工作就称为控制测量。
控制测量包括平面控制测量和高程控制测量,平面控制测量用来测定控制点的平面坐标,高程控制测量用来测定控制点的高程。
1.平面控制测量平面控制网主要包括GPS控制网、三角网和导线网。
GPS控制网是采用全球定位系统建立的。
三角网是指地面上一系列的点构成连续的三角形,这些三角形所形成的网状结构就是三角网。
导线的概念在前面就已经讲过了,将地面上一系列的控制点依次连接起来,所形成的折线就是导线。
由导线所构成的控制网就是导线网。
导线测量是本章中要重点讲述的内容。
2.高程控制测量高程控制网主要采用水准测量、三角高程测量的方法建立。
用水准测量方法建立的高程控制网称为水准网。
三角高程测量主要用于地形起伏较大、直接水准测量有困难的地区。
一、国家基本控制网在全国范围内建立的高程控制网和平面控制网,称为国家控制网。
它是全国各种比例尺测图的基本控制,也为研究地球的形状和大小(提供依据),了解地壳水平形变和垂直形变的大小及趋势,为地震预测提供形变信息等服务。
1.国家平面控制网我国的国家平面控制网是采用逐级控制、分级布设的原则,分一、二、三、四等方法建立起来的。
主要由三角测量法布设,在西部困难地区采用精密导线测量法。
目前我国正采用GPS控制测量逐步取代三角测量。
第七章 小地区控制测量

国家高程控制网:一、二、三、四等。
城市高程控制网:二、三、四等。 小地区高程控制网:三、四等及图根水准。
各级高程控制网均采用水准测量、高山地区可采用三角高程测量。
Company Logo
国家高程控制网
Company Logo
我国一等水准 网由289条路线 组成,其中284 条路线构成100 个闭合环,共 计埋设各类标 石近2万余座。 全国一等水准 网布设略图如 图所示。
附合导线
Company Logo
三、经纬仪导线测量外业
导线测量的外业工作包括:踏勘选点、测角、量边和起始 方位角的测定。
(一)踏勘选点及建立标志
图上初选——实地定点 —— 埋设标志
Company Logo
导线点的选择及注意问题
相邻点要通视、视野开阔、方便碎部测 量、密度均匀(相邻边长比小于三倍)、 土质坚硬、方便测角量边、能长期保存。
如果导线全长相对闭合差满足 K K ,则可以按 允
反符号与边长成正比的原则,对坐标增量闭合差进行调整。
坐标增量改正数为:
fx li Vxi l V f y l i yi l
坐标增量满足的条件:
Vx f x V y f y
Company Logo
(三)、坐标增量的计算
坐标正算
已知A点的坐标及AB的边长及方位角,计算B点的坐标。
A、B两点的坐标增量为:
x
∆yAB
x AB xB x A S AB cos AB y AB yB y A S AB sin AB
B点的坐标为:
xB ∆xAB αAB xA
小地区控制测量

(2)坐标增量闭Байду номын сангаас差旳计算
根据闭合导线本身旳特点: 北
理论上 实际上
x理 0 4
y理 0
893350
fx
x
测
1
893630
3 730020
f y y测 1253000
1074830
2
闭合导线坐标计算表
观察角 改
点 号
正 (右角) 数
°´" ˝
-0.63 +116.44 +0.05 -0.03 -13.05 +155.70
改正后增量
Δx
Δy
m
m
坐标值 点
x
y号
m
m
A
-107.27 -17.89 +30.92 -0.60 -13.00
1536.86 837.54 B -64.83
1429.59 772.71 1 +97.10
1411.70 869.81 2 +141.27
理 始 终 n 180
同理:以左角计算 理
理 终 始 n 180
B
B
A AB 3
4
CD
D
1
12
C
3
4
B1
2
AB
180
C
B
12 B1 180 1
23 12 180 2
34 23 180 3
4C 34 180 4
+) CD 4C 180 C
CD AB 6 180 理
对所得角值旳处理原则是: 若显示值>0,则该值即为
所求旳αAB 。 若显示值<0,则该值加上
小地区高程控制测量
小区域控制测量
小区域控制测量分为两种方法:1.三、四等水准测量
2.三角高程测量
三、四等水准测量的作业方法
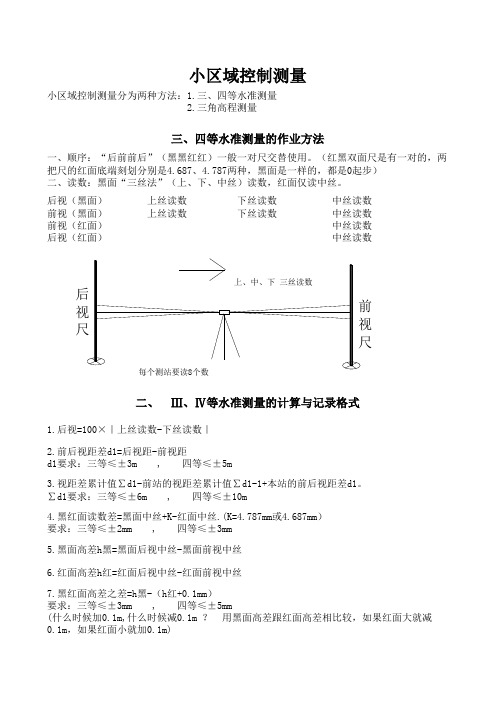
一、顺序:“后前前后”(黑黑红红)一般一对尺交替使用。
(红黑双面尺是有一对的,两把尺的红面底端刻划分别是4.687、4.787两种,黑面是一样的,都是0起步)
二、读数:黑面“三丝法”(上、下、中丝)读数,红面仅读中丝。
后视(黑面) 上丝读数 下丝读数 中丝读数
前视(黑面) 上丝读数 下丝读数 中丝读数
前视(红面) 中丝读数
后视(红面) 中丝读数
二、 Ⅲ、Ⅳ等水准测量的计算与记录格式
1.后视=100×|上丝读数-下丝读数|
2.前后视距差d1=后视距-前视距
d1要求:三等≤±3m , 四等≤±5m
3.视距差累计值∑d1-前站的视距差累计值∑d1-1+本站的前后视距差d1。
∑d1要求:三等≤±6m , 四等≤±10m
4.黑红面读数差=黑面中丝+K-红面中丝.(K=4.787mm或4.687mm)
要求:三等≤±2mm , 四等≤±3mm
5.黑面高差h黑=黑面后视中丝-黑面前视中丝
6.红面高差h红=红面后视中丝-红面前视中丝
7.黑红面高差之差=h黑-(h红+0.1mm)
要求:三等≤±3mm , 四等≤±5mm
(什么时候加0.1m,什么时候减0.1m ? 用黑面高差跟红面高差相比较,如果红面大就减0.1m,如果红面小就加0.1m)
8.高差中数=[h黑+(h红+0.1m)]/2
9.水准路线总长L=∑后视距+∑前视距。
小地区控制测量

二、国家控制网
平面:国家平面控制网由一、二、三、四等三角网 (triangulation network)组成。
高程:国家高程控制网是由一、二、三、四等水准 网(leveling network)组成。
国家控制网的特点:高级点逐级控制低级点。
图形1:国家一、二等平面控制网布置形式
一等三角网
二等三角网
3.支导线(open traverse) 支导线的点数不宜超过2个,仅作补点使用。
图形:导线的布设形式
附合导线
闭合导线
支导线
单结点导线(导线网)
三、导线的外业
1.踏勘选点及建立标志 2.测水平角 3、量水平边长 4、测连接角、连接边
要求:
相邻导线点要通视 便于量距、架设仪器 具有控制意义 边长符合规范规定(特别注意避免短边)
点 号
观测角
改
正 数
坐标方位 角
距离
坐标增量 改正后的
△x
△ y
△x
△ y
坐标值
x
y
1
2 107 48 30 +13 125 30 00 105.22 53 18 43 80.18
3 73 00 20 +12 4 89 33 50 +12 306 19 15 129.34
215 53 17 78.16 1 89 36 30 +13
2
125 30 00
-61.10 +47.90 +76.61 -63.32
500.00 500.00
∑ 359 59 10 +50
392.90 +0.09
f 3595910 3600000 50 f容 60 4 120
小区域控制测量

小区域控制测量控制测量概述1、测量的原则:测量工作必须遵循“从整体到局部,先控制后碎部”的原则。
这里的“整体”是指控制测量(control survey),其含义为控制测量应按由高等级到低等级逐级加密进行,直至最低等级的图根控制测量(mapping control survey),再在图根控制点上安置仪器进行碎部测量或测设工作。
2、控制测量:以较高的精度测定地面少数与整体有关点的相对位置。
(x、y、H),为地形测量和工程测量提供依据和精度的工作。
3、控制网:在测区内选定若干控制点而构成一定的几何图形。
4、控制测量包括平面控制测量和高程控制测量,称测定点位的(x,y)坐标为平面控制测量,测定点位的H坐标为高程控制测量。
5、国家控制网:在全国范围内建立的控制网。
它是全国各种比例尺测图的基本控制,也为研究地球的形状和大小,了解地壳水平形变和垂直形变的大小及趋势,为地震预测提供形变信息等服务。
国家控制网是用精密测量仪器和方法依照《国家三角测量和精密导线测量规范》、《全球定位系统(GPS)测量规范》、《国家一、二等水准测量规范》及《国家三、四等水准测量规范》按一、二、三、四等四个等级、由高级到低级逐级加密点位建立的。
6、平面控制测量(1)国家平面控制测量★我国的国家平面控制网(horizontal control network)是采用逐级控制、分级布设的原则,分一、二、三、四等方法建立起来的。
★经典方法主要由三角测量(triangulation)法、导线测量(traverse survey)法。
另外,还有卫星大地测量,如GPS卫星定位。
★一等三角锁(triangulation chain)沿经线和纬线布设成纵横交叉的三角锁系,锁长200~250公里,构成许多锁环。
构成国家平面控制网的骨干。
一等三角锁内由近于等边的三角形组成,边长为20~30公里。
★二等三角测量有两种布网形式,一种是由纵横交叉的两条二等基本锁将一等锁环划分成4个大致相等的部分,这4个空白部分用二等补充网填充,称纵横锁系布网方案;另一种是在一等锁环内布设全面二等三角网(triangulation network),称全面布网方案。
测量学6小地区控制测量

二、国家控制 网的概念
为了统一全国各地区的测量工作,必须进行全国性的 控制测量,以建立国家控制网,供整个国民经济规划 和国防建设等使用。国家控制网分平面控制网和高程 控制网。
国家平面控制网
国家平面控制网主要是采用三角测量方法建立的,即 在全国范围内将控制点组成一系列的三角形,通过测 定所有三角形的内角,推算出各控制点的坐标。国家 控制网也是按照“由高级到低级、由整体到局部”的 原则布设的。国家平面控制网按其精度可分为一、二、 三、四等四个等级。
根据坐标方位角的定义,它是 从坐标轴北端开始顺时针旋转 至某边的水平角。因此有相同 端点的两条边,右侧边的坐标 方位角就等于左侧边的坐标方 位角加上两边之间的夹角,同 一条边的正反方位角相差180°。 即沿导线前进方向:
1
4
上式中包含具相同端点两条边 的方位角关系以及正反方位角 的关系。
2
3
5
α前=α后-180°+β左 =α后+180°-β右。
(四) 起始边方位角的测定
与高级已知点连接的导线,因有已知边方 位角,只需观测连接角便可以推算各边的 方位角,然后推算各点的坐标。对于不与 高级已知点相连接的闭合导线,则可用罗 盘仪测定一条起始边的磁方位角,便可推 算其他各边的方位角,并推算各点的坐标。
(五) 导线测量记录
导线测量的外业记录有规定的表格。
二、 经纬仪附合导线计算 附合导线计算角度闭合差和坐标增量闭合差的公式
不同。 (一) 角度闭合差的计算与调整
附合导线的角度闭合差为从一已知边方位角出发, 使用观测角推算至另一条已知边,推算方位角与已知 方位角之差。 (二) 坐标方位角的推算
推算出的已知边的坐标方位角应与已知值相同,以 此作为计算的检核。 (三) 坐标增量的计算 根据导线各边的方位角和边长,计算各坐标增量,计 算方法与闭合导线相同。
第5章小地区控制测量

最后推算回到起始点的坐标应与原坐标值完全相 等,此作为坐标值计算校核。
例:
三、附合导线的内业计算 附合导线的计算,原则上与闭合导线相同,但有两
点不同: 1、角度闭合差的计算 附合导线的角度闭合差要用推算坐标方位角的方法
③ 高差计算与检核 按前、后视水准尺红、黑面中丝读数分别计算一站
高差:黑面高差(15)={(3)-(6)}÷1000 红面高差(16)={(8)-(7)}÷1000
红黑面高差之差(17)=(15)-{(16)±0.1}=(14)-(13) 对于三等水准,
(17)不超过3mm,对于四等水准,(17)不超过5mm。
B两点间的水平距离D,A点
的高程HA,观测竖角α,求 B点高程HB,量得仪器高为I, 目标高为b,则HB=HA+hAB
三角高程测量原理
而:
hAB=Dtgα+i-b Dtgα以h’表示,称为初算高差,所以
HB=HA+h’+i-b
若以三角高程测量方法来建立高程控制点,除了 起始点高程(如A点高程HA),必须用水准测量方法 引测外,还要进行两点间的对向观测,即由A点观测B 点,又从B点观测A点,两次测得高差的较差不超过 0.4Dm(D以百米为单位),则取两次高差的平均值。
以控制点为测站,测定其周围地形特征点或界址 点的位置,从而得到具有统一精度的地形图或地籍图, 这部分工作称为碎部测量(或称为细部测量)。
控制测量分为平面控制测量、高程控制测量和三 维控制测量。
一、平面控制测量
测定控制点平面位置的工作,称为平面控制测量, 平面控制网是某参考面上,由相互联系的平面控制点 所构成的测量控制网。范围较小时(一般半径小于 10km),可把参考面看作平面,通常情况下是指参考 椭球面。方法主要有:全球定位系统(GPS)、三角 测量、导线测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-4
-4
90 05 58
121 28 02
80.22 -1
-83.77 -1 -210.29 -1 +0.06
-226.83 -2
-182.06 -1 96.31 -2 +0.09
80.21
-83.78 -210.30
-226.85
-182.07
710.30 96.29 500
∑
540 00 18
计算略图
闭合导线计算:左边
点 号 观 测 角 ° ′ ″ 改 正 数 ″ 改正后角 ° ′ ″ 方位角 ° ′ ″ 边长 m 坐标增量计算值 (m)
△X’ +5 -165.50 180.28 +5 198.36 +5 -213.36 +7 △Y’ +1 172.68 158.26 +1 -121.04 +1 -209.94 +1
本章主要介绍小地区平面控制和高程控 制测量的方法,重点介绍导线测量和三角 高程测量。
5.1 控制测量概述
测量的基本原则:从整体到局部,由高级到低 级,先控制,后碎部。 这主要是为了减少误差积累,保证测量点位 的精度。同时可以统一坐标系统,分组作业,加 快速度。
在测区范围内,选择少量有控制意义 的控制点,与已知点构成一定的几何图形, 用较高精度的仪器、方法测定其坐标,作 为碎部测量的依据,这个工作过程就叫控 制测量。
B C
△Y 2(X2,Y2)
A
△X
S
△X=S cos
D
△Y=S sin
1(X1,Y1)
E
F
2. 导线的路线形式
闭合导线 单一导线 附合导线 导线 支导线
导线网
结点网
环形网
7.2.2 导线测量外业工作
导线测量外业工作包括: 踏勘选点、埋设标志、测距、测角。
1. 选点、埋设标志 图上初选——实地定点 —— 埋设标志 有图的话可以根据测区地形、已知点的 分布情况,先在图上拟定导线的形式、 走向,导线点的大概位置,然后,到实 地考察确定点位。
终边
始边
内业计算的具体步骤:
10.由边长、方位角计算各边的坐标增量: △X=S²cos △Y=S²sin 11.计算坐标增量闭合差(fx,fy),并评定精度 (K)。 闭合导线: fx=∑△X fY=∑△Y 附合导线: fx=∑△X-(X终-X始) fy=∑△Y-(Y终-Y始) f= f f K=f/ ∑S=1/? ≤K容 则合 格
84 10 31
135 49 03
-4
-3
84 10 27
289 28 36 135 49 00
475.91
713.87 794.08
1200.15
1312.63 1085.78 903.71 1000
245 17 36
155 23 34 96 51 36
240.60
200.41 231.30
90 06 02
A
B
2. 侧方交会
• 在前方交会中,若其中一 个已知点不好安仪器时, 可以在未知点上安仪器, 观测角和角,然后计 算出角,这就是侧方交 会法。 • 坐标计算与前方交会一样, 应用余切公式计算即可。 A
P B
P
A
B
C
SA SB
A
距离交会
B
P
P 后方交会
K
单三角交会 A B
三角高程测量
v
h’
适用于地形起伏较大的地区高程控制。
精度不如水准测量。
B
1 . 三角高程测量原理
h’=Dtg hAB=h’+i-v
A
i
D
HB=HA+hab= HA+D tan + i -v
记录、计算
觇法 测站点 往(直) A 返 B
觇标点 平距D
竖直角 D³tg 仪器高i 觇标高v 高差h 平均高差
-18
540 00 00
1137.15
0
0
辅助计算
f=+18″ f容=±60√n = ± 134 ″合格 v =-18″/5
fx= +0.06 fy= +0.09 f= 0.11
k=0.11/1137.15=1/10300 k容=1/2000 合格
6.4 交会定点
• 交会定点主要是由两个或多个已知点通过 测定与未知点的水平夹角或边长来确定未 知点的坐标的一种方法。 • 主要应用于碎部测量或施工放样控制点的 加密。 • 交会定点通常有以下几种形式: 前方交会、后方交会、侧方交会、单 三角形(独立三角)、距离交会。
-165.45 180.33 198.41 -213.29
172.69 158.27 -121.03 -209.93 500 680.33 878.74 1000 1158.27 1037.24
D
A
89 15 00
-15
89 14 45
133 47 00
665.45
827.31
∑
360 01 00
-60
6.5 高程控制测量
• 小地区高程控制测量通常采用三、四 等水准测量、图根水准测量或三角高 程测量。平坦测区首级一般采用三等 或四等水准,山区多采用三角高程。
6.5.1 三、四等水准测量
三四等水准测量是在国家一二等水准 点的基础上,根据测区情况,按照国 家三四等水准测量规范进行布测的。 三四等水准测量的外业工作与前面第 二章讲的大同小异,用S1或S3水准 仪观测,只不过技术要求高一些,具 体参看表6.11。
B 341.23
+14 06 30 +85.76 +1.31 -3.80 +0 -80.77 +1.23 -3.80 -83.24 +83.30
3. 内业平差计算
(同水准测量平差,不再重复) 不同的是: 路线闭合差允许值:f h容=±0.05
控制测量分
平面控制测量
(确定平面坐标X、Y)
高程控制测量 (确定高程H) 水 准 测 量 三 角 高 程 测 量 等 外 水 准 测 量 GPS
平 面 三 角 测 量
导 线 测 量
GPS 控 制 测 量 国 家 一 二 三 四 等 AB C D E
高 程 测 量
国 家 一 二 三 四 等
等 外 小 三 角 测 量
转折角 连接角 转折角
D
A
5 C
A
B 前进方向
左角
6
4 5 4 3
1 B
1
闭合导线测多边形内角 3
2 2 右角
对于独立地区周围无高级控制点时, 可假定某点的坐标,测定起始边的 磁方位角,即采用独立坐标。
N 4 3
2
M
1
6.3 导线的内业计算
• 目的:求出待定导线点的坐标,并对观测成果 进行精度评定。 如果是全站仪导线则可以自动进行平差计算, 经纬仪导线则需要手工计算坐标。 • 由于仪器、人员、环境影响的原因,外业观测 的角度、距离无可避免会存在误差,如果直接 用观测值计算坐标,则坐标就不准确,因此, 需要对观测值进行平差,即将误差合理地分配 到各观测值中去,对观测值进行改正,然后, 用改正后的观测值计算坐标。
选点应注意的问题
相邻点要通视、视野开阔、方便碎部 测量、密度均匀(相邻边长比小于三倍)、 土质坚硬、方便测角量边、能长期保存。 如果是永久导线点还要作好点之记。
• 标志的设立:
临时图根点
等级导线点
2、导线的外业观测
(1)测边 水平距离测量 (用钢尺往返丈量或测距仪测定) (2)测角 连接角及转折角的水平角观测, (附合导线统一测左角,闭合导线测内角) 观测方法:测回法。 根据导线的等级及仪器的等级,按规范选定测 回数。
6.5.1 三、四等水准测量
三、四等水准测量对前后视距差及累积 差有较严格的要求,所以必须先测定距 离,合格后才开始高差观测。 为了减少仪器及标尺下沉对高差的影响, 观测顺序为:后(黑)—前(黑)—前 (红)—后(红) 三、四等水准测量的记录、计算见P119 内业平差计算同第二章
6.5.3
+ + 坐标正算:由边长、方位 - 角计算坐标增量,再计算 + 坐标。
△XAB=S· cosAB - =S· △Y sin AB XB- =XA+ △XAB YB=YA+ △YAB
△Y
B
- AB +
△X
AB
S
坐标反算方位角:由两点 的已知坐标,计算该边的 坐标方位角。
R=arc tg Y
改正后坐标增量 (m)
△X △Y
坐标值 (m)
X Y
D A B C
87 30 00 107 20 00 75 56 00 -15 -15 -15 87 29 45 107 19 45 328 36 30 75 55 45 224 32 15 299.33 232.38 133 47 00 41 16 45 239.18 239.89
内业计算的具体步骤 • • • • • • 1. 2. 3. 4. 5. 6. 外业观测数据的全面检查。 绘出计算略图。 绘制计算表格。 填入点号及观测数据、已知数据。 反算已知边方位角。 计算方位角闭合差及允许误差, 评定是否合格。
内业计算的具体步骤:
• 7.若合格,则对角度闭合差进行分配(分配 原则:反号,平均分配,角度改正数=- f/n)。 • 8.计算改正后的角度(观测值+改正数)。 • 9.用改正后的角度推算各边的方位角 (左角公式:前边方位角=后边方位角+左角- 180°) 。
地形测图对控制点密度的要求