CNC常用系统变量
CNC数控机床系统变量
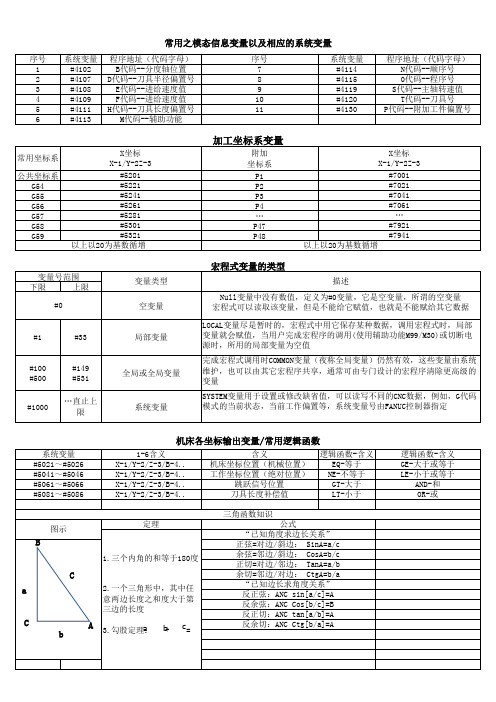
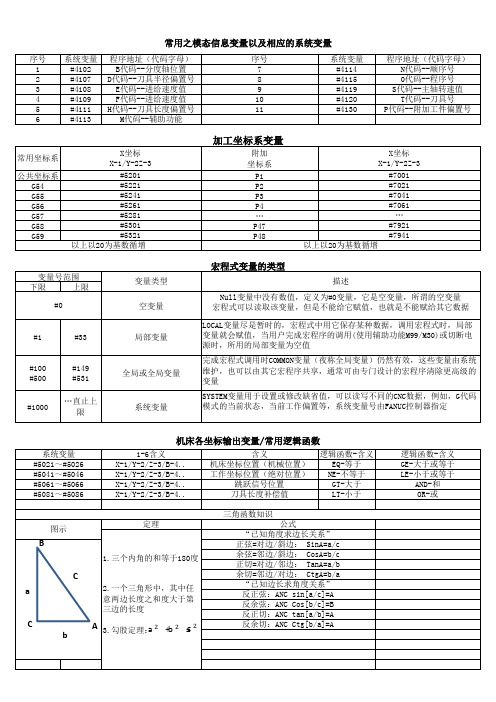
加工坐标系变量
附加 坐标系
P1 P2 P3 P4 … P47 P48
X坐标 X-1/Y-2Z-3
以上以20为基数循增
#7001 #7021 #7041 #7061
… #7921 #7941
变量号范围
下限
上限
#0
#1
#33
#100 #500
#149 #531
#1000
…直止上 限
变量类型 空变量
局部变量 全局或全局变量
机床各坐标输出变量/常用逻辑函数
1-6含义 X-1/Y-2/Z-3/B-4.. X-1/Y-2/Z-3/B-4.. X-1/Y-2/Z-3/B-4.. X-1/Y-2/Z-3/B-4..
含义 机床坐标位置(机械位置) 工作坐标位置(绝对位置)
跳跃信号位置 刀具长度补偿值
逻辑函数-含义 EQ-等于 NE-不等于 GT-大于 LT-小于
完成宏程式调用时COMMON变量(夜称全局变量)仍然有效,这些变量由系统 维护,也可以由其它宏程序共享,通常可由专门设计的宏程序清除更高级的 变量
SYSTEM变量用于设置或修改缺省值,可以读写不同的CNC数据,例如,G代码 模式的当前状态,当前工作偏置等,系统变量号由FANUC控制器指定
系统变量 #5021~#5026 #5041~#5046 #5061~#5066 #5081~#5086
图示
B
C a
C b
定理
1.三个内角的和等于180度
2.一个三角形中,其中任 意两边长度之和度大于第 三边的长度
A 3.勾股定理a: b+ c=
三角函数知识 公式
“已知角度求边长关系” 正弦=对边/斜边: SinA=a/c 余弦=邻边/斜边: CosA=b/c 正切=对边/邻边: TanA=a/b 余切=邻边/对边: CtgA=b/a
(数控CNC宏程吧)宏程序编程实例与技巧方法

自变量指定Ⅱ
•根据使用的字母,系统自动决定自变量指定的类型。 •自变量指定Ⅱ用于传递诸如三维坐标值的变量。 •I,J,K 的下标用于确定自变量指定的顺序,在实际编程 中不写。
如果自变量指定Ⅰ和自变量指定Ⅱ混合指定的话,后指定 的自变量类型有效。
六、 FANUC宏程序的调用
2. 模态调用(G66): G66 Pp Ll <自变量指定>; 程序点 G67;(取消模态)
2、 运算符与表达式
(1) 算术运算符:+,-,*,/ (2) 条件运算符:EQ(=),NE(≠),GT(>),GE (≥),LT(<=),LE(≤) (3) 逻辑运算符:AND,OR,NOT (4) 函 数 : SIN,COS,TAN,ATAN,ATAN2,ABS,INT ,SIGN,SQRT,EXP (5) 表达式:用运算符连接起来的常数,宏变量构成 表达式。 例如:175/SQRT[2] * COS[55 * PI/180 ];#3*6 GT 14
#10=#10+1;
ENDW
END 1
X45 Y15;
X45 Y15;
G00 Z30
G00 Z30
X0 Y0 M05
X0 Y0 M05
M30
M30
•SIEMENS数控系统参数编程
与FANUC类似,但功能要弱一些。变量以“R” 开始,如:R0、R1、R99。不包含系统变量,系 统变量以 “$”开头。 一、格式:Rn (n的缺省取值范围为0-99)
5、 循环语句WHILE,ENDW
格式:WHILE 条件表达式 … ENDW
6、 宏程序/子程序调用的参数传递规则
G 代码在调用宏(子程序或固定循环 ,下同)时,系统会将当前程序段各 字段(A~Z共26个字段,如果没有定 义则为零)的内容拷贝到宏执行时的 局部变量#0 ~ #25,同时拷贝调用宏 时当前通道九个轴(轴0~轴8)的绝 对位置(机床绝对坐标)到宏执行时的 局部变量#30 ~ #38。
CNC代码及宏程式指令
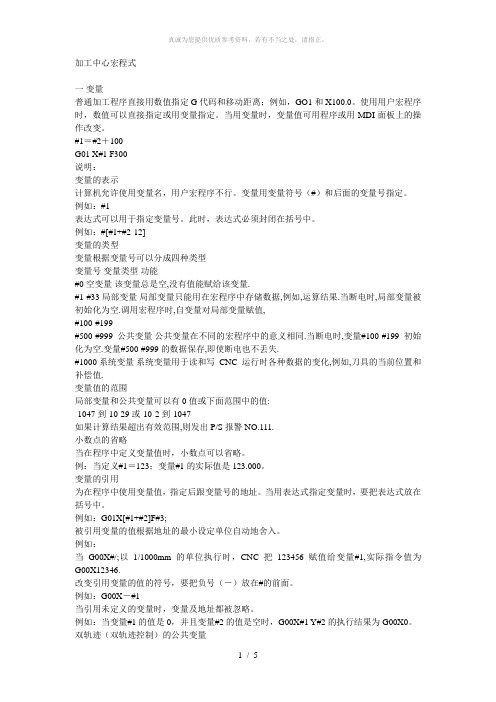
加工中心宏程式一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199#500-#999 公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
例如:当G00X#/;以1/1000mm的单位执行时,CNC把123456赋值给变量#1,实际指令值为G00X12346.改变引用变量的值的符号,要把负号(-)放在#的前面。
例如:G00X-#1当引用未定义的变量时,变量及地址都被忽略。
CNC常用系统变量,G10
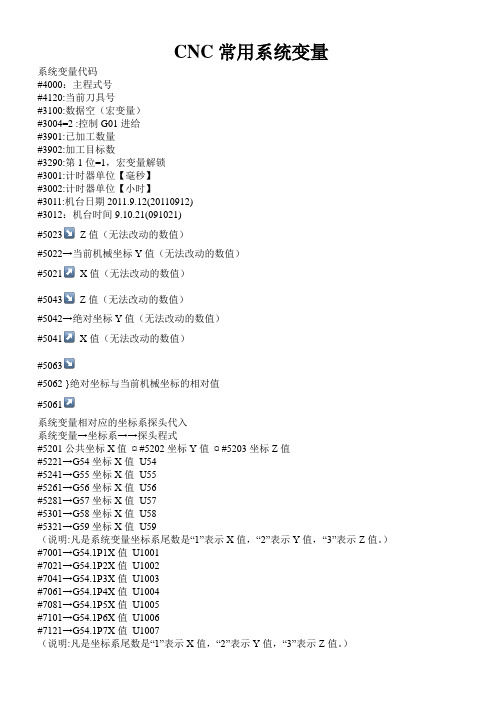
CNC常用系统变量系统变量代码#4000:主程式号#4120:当前刀具号#3100:数据空(宏变量)#3004=2 :控制G01进给#3901:已加工数量#3902:加工目标数#3290:第1位=1,宏变量解锁#3001:计时器单位【毫秒】#3002:计时器单位【小时】#3011:机台日期2011.9.12(20110912)#3012:机台时间9.10.21(091021)#5023Z值(无法改动的数值)#5022→当前机械坐标Y值(无法改动的数值)#5021X值(无法改动的数值)#5043Z值(无法改动的数值)#5042→绝对坐标Y值(无法改动的数值)#5041X值(无法改动的数值)#5063#5062 }绝对坐标与当前机械坐标的相对值#5061系统变量相对应的坐标系探头代入系统变量→坐标系→→探头程式#5201公共坐标X值¤ #5202坐标Y值¤ #5203坐标Z值#5221→G54坐标X值U54#5241→G55坐标X值U55#5261→G56坐标X值U56#5281→G57坐标X值U57#5301→G58坐标X值U58#5321→G59坐标X值U59(说明:凡是系统变量坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)#7001→G54.1P1X值U1001#7021→G54.1P2X值U1002#7041→G54.1P3X值U1003#7061→G54.1P4X值U1004#7081→G54.1P5X值U1005#7101→G54.1P6X值U1006#7121→G54.1P7X值U1007(说明:凡是坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)参数7851;换刀刀盘旋转速度7810:当前刀具号,(必须与当前刀具号一致)3201:传程式时断开,将从左数2位“0”改成“1”3202:解除“8”“9”字开头的程式保护6031:设定宏变量号保护起始6032:设定宏变量号保护末尾1321:控制机台行程LE: 小于或等于≤【Less then or Equal 】LT: 小于<【Less Then 】GE: 大于或等于≥【Great then or Equal】GT: 大于>【Great Than 】EQ: 等于=【Equal】NE: 不等于≠【Not Equal】WH: 循环【WHILE 】END: 结束IF: 如果GOTO: 跳跃THEN:那么OR: 和AND: 或者ABS: 绝对值G90 G10 L2 P0(公共坐标) X0 Y0 Z0程式里写G90 G10 L2 P0后面带的坐标值会自动输入相应的坐标系里去,例如:G90 G10 L2 P1 (G54)X50 Y10 Z0:程式后面的X50 Y10 Z0,CNC读到这句话后,G54坐标将会是X50 Y10 Z0: G90 G10 L2 P0(公共坐标) X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P3 (G56)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P4 (G57)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P5 (G58)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P6 (G59)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P1(G54.1P1)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P2(G54.1P2)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P3(G54.1P3)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P4(G54.1P4)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P5(G54.1P5)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P6(G54.1P6)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P7(G54.1P7)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P8(G54.1P8)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L10 P1 R95. ;含义:#11001等于95.(P:刀具号R:数值L10 )G90 G10 L11 P2 R95. ;含义:#10002等于95.(P:刀具号R:数值L11 )G90 G10 L12 P3 R95. ;含义:#13003等于95.(P:刀具号R:数值L12 )G90 G10 L13 P4 R95. ;含义:#12004等于95.(P:刀具号R:数值L13 )G10 L52; N3202 R01010001 (开参数)G10 L52; N6031 R650 (开参数)G11; (关参数)刀具长度补偿【H】几何补偿#11001,#11002……#11400磨损补偿#10001,#10002……#10400 【补偿号1……400】刀具半径补偿【D】几何补偿#13001,#13002……#13400 磨损补偿#12001,#12002……#12400。
CNC都有那些变量
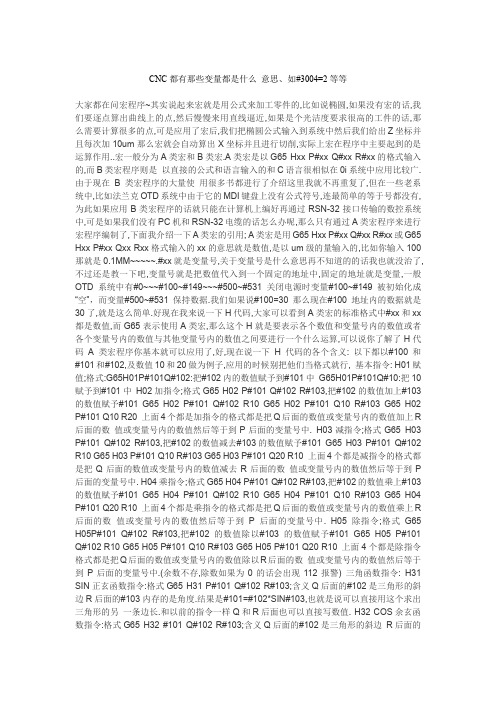
CNC都有那些变量都是什么意思、如#3004=2等等大家都在问宏程序~其实说起来宏就是用公式来加工零件的,比如说椭圆,如果没有宏的话,我们要逐点算出曲线上的点,然后慢慢来用直线逼近,如果是个光洁度要求很高的工件的话,那么需要计算很多的点,可是应用了宏后,我们把椭圆公式输入到系统中然后我们给出Z坐标并且每次加10um那么宏就会自动算出X坐标并且进行切削,实际上宏在程序中主要起到的是运算作用..宏一般分为A类宏和B类宏.A类宏是以G65 Hxx P#xx Q#xx R#xx的格式输入的,而B类宏程序则是以直接的公式和语言输入的和C语言很相似在0i系统中应用比较广.由于现在B类宏程序的大量使用很多书都进行了介绍这里我就不再重复了,但在一些老系统中,比如法兰克OTD系统中由于它的MDI键盘上没有公式符号,连最简单的等于号都没有,为此如果应用B类宏程序的话就只能在计算机上编好再通过RSN-32接口传输的数控系统中,可是如果我们没有PC机和RSN-32电缆的话怎么办呢,那么只有通过A类宏程序来进行宏程序编制了,下面我介绍一下A类宏的引用; A类宏是用G65 Hxx P#xx Q#xx R#xx或G65 Hxx P#xx Qxx Rxx格式输入的xx的意思就是数值,是以um级的量输入的,比如你输入100那就是0.1MM~~~~~.#xx就是变量号,关于变量号是什么意思再不知道的的话我也就没治了,不过还是教一下吧,变量号就是把数值代入到一个固定的地址中,固定的地址就是变量,一般OTD系统中有#0~~~#100~#149~~~#500~#531关闭电源时变量#100~#149被初始化成“空”,而变量#500~#531保持数据.我们如果说#100=30那么现在#100地址内的数据就是30了,就是这么简单.好现在我来说一下H代码,大家可以看到A类宏的标准格式中#xx和xx 都是数值,而G65表示使用A类宏,那么这个H就是要表示各个数值和变量号内的数值或者各个变量号内的数值与其他变量号内的数值之间要进行一个什么运算,可以说你了解了H代码A类宏程序你基本就可以应用了,好,现在说一下H代码的各个含义: 以下都以#100和#101和#102,及数值10和20做为例子,应用的时候别把他们当格式就行, 基本指令: H01赋值;格式:G65H01P#101Q#102:把#102内的数值赋予到#101中G65H01P#101Q#10:把10赋予到#101中H02加指令;格式G65 H02 P#101 Q#102 R#103,把#102的数值加上#103的数值赋予#101 G65 H02 P#101 Q#102 R10 G65 H02 P#101 Q10 R#103 G65 H02 P#101 Q10 R20 上面4个都是加指令的格式都是把Q后面的数值或变量号内的数值加上R 后面的数值或变量号内的数值然后等于到P后面的变量号中. H03减指令;格式G65 H03 P#101 Q#102 R#103,把#102的数值减去#103的数值赋予#101 G65 H03 P#101 Q#102 R10 G65 H03 P#101 Q10 R#103 G65 H03 P#101 Q20 R10 上面4个都是减指令的格式都是把Q后面的数值或变量号内的数值减去R后面的数值或变量号内的数值然后等于到P 后面的变量号中. H04乘指令;格式G65 H04 P#101 Q#102 R#103,把#102的数值乘上#103的数值赋予#101 G65 H04 P#101 Q#102 R10 G65 H04 P#101 Q10 R#103 G65 H04 P#101 Q20 R10 上面4个都是乘指令的格式都是把Q后面的数值或变量号内的数值乘上R 后面的数值或变量号内的数值然后等于到P后面的变量号中. H05除指令;格式G65 H05P#101 Q#102 R#103,把#102的数值除以#103的数值赋予#101 G65 H05 P#101 Q#102 R10 G65 H05 P#101 Q10 R#103 G65 H05 P#101 Q20 R10 上面4个都是除指令格式都是把Q后面的数值或变量号内的数值除以R后面的数值或变量号内的数值然后等于到P后面的变量号中.(余数不存,除数如果为0的话会出现112报警) 三角函数指令: H31 SIN正玄函数指令:格式G65 H31 P#101 Q#102 R#103;含义Q后面的#102是三角形的斜边R后面的#103内存的是角度.结果是#101=#102*SIN#103,也就是说可以直接用这个求出三角形的另一条边长.和以前的指令一样Q和R后面也可以直接写数值. H32 COS余玄函数指令:格式G65 H32 #101 Q#102 R#103;含义Q后面的#102是三角形的斜边R后面的#103内存的是角度.结果是#101=#102*COS#103,也就是说可以直接用这个求出三角形的另一条边长.和以前的指令一样Q和R后面也可以直接写数值. H33和H34本来应该是TAN 和ATAN的可是经过我使用得数并不准确,希望有知道的人能够告诉我是为什么? 开平方根指令: H21;格式G65 H21 P#101 Q#102 ;意思是把#102内的数值开了平方根然后存到#101中(这个指令是非常重要的如果在车椭圆的时候没有开平方跟的指令是没可能用宏做到的. 无条件转移指令: H80;格式:G65 H80 P10 ;直接跳到第10程序段有条件转移指令: H81 H82 H83 H84 H85 H86 ,分别是等于就转的H81;不等于就转的H82;小于就转的H83;大于就转的H84;小于等于就转的H85;大于等于就转的H86; 格式:G65 H8x P10 Q#101 R#102;将#101内的数值和#102内的数值相比较,按上面的H8x的码带入H8x中去,如果条件符合就跳到第10程序段,如果不符合就继续执行下面的程序段. 用户宏程序能完成某一功能的一系列指令像子程序那样存入存储器,用一个总指令来它们,使用时只需给出这个总指令就能执行其功能。
CNC数控机床系统变量
B
1.三个内角的和等于180度
C a
2.一个三角形中,其中任 意两边长度之和度大于第 三边的长度
C b
A 3.勾股定理: c ^2 a ^2 +b ^2 =
常用之模态信息变量以及相应的系统变量
序号 1 2 3 4 5 6 系统变量 #4102 #4107 #4108 #4109 #4111 #4113 程序地址(代码字母) B代码--分度轴位置 D代码--刀具半径偏置号 E代码--进给速度值 F代码--进给速度值 H代码--刀具长度偏置号 M代码--辅助功能 序号 7 8 9 10 11 系统变量 #4114 #4115 #4119 #4120 #4130 程序地址(代码字母) N代码--顺序号 0代码--程序号 S代码--主轴转速值 T代码--刀具号 P代码--附加工件偏置号
#0
#149 #531 „直止上限
全局或全局变量
系统变量
机床各坐标输出变量/常用逻辑函数
系统变量 #5021~#5026 #5041~#5046 #5061~#5066 #5081~#5086 1-6含义 X-1/Y-2/Z-3/B-4.. X-1/Y-2/Z-3/B-4.. X-1/Y-2/Z-3/B-4.. X-1/Y-2/Z-3/B-4.. 含义 机床坐标位置(机械位置) 工作坐标位置(绝对位置) 跳跃信号位置 刀具长度补偿值 三角函数知识 图示 定理 公式 “已知角度求边长关系” 正弦=对边/斜边: SinA=a/c 余弦=邻边/斜边: CosA=b/c 正切=对边/邻边: TanA=a/b 余切=邻边/对边: CtgA=b/a “已知边长求角度关系” 反正弦:ANC sin[a/c]=A 反余弦:ANC Cos[b/c]=B 反正切:ANC tan[a/b]=A 反余切:ANC Ctg[b/a]=A 逻辑函数-含义 EQ-等于 NE-不等于 GT-大于 LT-小于 逻辑函数-含义 GE-大于或等于 LE-小于或等于 AND-和 OR-或
fanuc机器人常用变量
fanuc机器人常用变量Fanuc机器人常用的变量包括系统变量和用户变量。
系统变量是由系统定义的,用于控制机器人的运动和操作,而用户变量则是用户可以自定义的变量,用于存储数据和控制程序流程。
下面我将从系统变量和用户变量两个方面进行详细介绍。
首先是系统变量,Fanuc机器人常用的系统变量包括:1. PR[1]-PR[9]: 用于存储程序号,可用于程序之间的调用和跳转。
2. R[1]-R[9]: 用于存储常用的数值数据,例如位置坐标、速度、加速度等。
3. LR[1]-LR[9]: 用于存储长数据,例如字符串或数组。
4. CR[1]-CR[9]: 用于存储循环计数器的数值。
5. SR[1]-SR[9]: 用于存储系统状态和报警信息。
6. PR[100]-PR[199]: 用于存储系统参数,例如速度、加速度、减速度等。
7. TRIGGER[1]-TRIGGER[9]: 用于存储触发器状态,可用于触发程序执行。
其次是用户变量,Fanuc机器人允许用户定义的变量包括:1. P[1]-P[9]: 用于存储用户自定义的程序号,可用于程序之间的调用和跳转。
2. R[10]-R[99]: 用于存储用户自定义的数值数据。
3. LR[10]-LR[99]: 用于存储用户自定义的长数据,例如字符串或数组。
4. CR[10]-CR[99]: 用于存储用户自定义的循环计数器的数值。
5. PR[200]-PR[999]: 用于存储用户自定义的系统参数,例如速度、加速度、减速度等。
这些变量可以在Fanuc机器人的程序中被引用和修改,用于实现复杂的控制逻辑和数据存储。
通过合理地使用这些变量,用户可以灵活地控制机器人的运动和操作,实现各种自动化任务。
同时,需要注意的是,在使用这些变量时,应当遵循Fanuc机器人的编程规范和最佳实践,以确保程序的稳定性和可维护性。
cnc宏程式
加工中心宏程式一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值, #100-#199#500-#999公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000系统变量系统变量用于读和写C NC运行时各种数据的变化,例如,刀具的当前位置和补偿值. 变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
CNC代码及宏程式指令
加工中心宏程式一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0 空变量该变量总是空,没有值能赋给该变量.#1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199#500-#999 公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000 系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
例如:当G00X#/;以1/1000mm的单位执行时,CNC把123456赋值给变量#1,实际指令值为G00X12346.改变引用变量的值的符号,要把负号(-)放在#的前面。
例如:G00X-#1当引用未定义的变量时,变量及地址都被忽略。
CNC常用系统变量
CNC常用系统变量系统变量#4000:主程式号#4120:当前刀具号#3100:数据空(宏变量)#3004=2 :控制G01进给#3901:已加工数量#3902:加工目标数#3290:第1位=1,宏变量解锁#3001:计时器单位【毫秒】#3002:计时器单位【小时】#3011:机台日期2011.9.12(20110912)#3012:机台时间9.10.21(091021)#5023Z值(无法改动的数值)#5022→当前机械坐标Y值(无法改动的数值)#5021X值(无法改动的数值)#5043Z值(无法改动的数值)#5042→绝对坐标Y值(无法改动的数值)#5041X值(无法改动的数值)#5063#5062 }绝对坐标与当前机械坐标的相对值#5061系统变量相对应的坐标系探头代入系统变量→坐标系→→探头程式#5201公共坐标X值¤ #5202坐标Y值¤ #5203坐标Z值#5221→G54坐标X值U54#5241→G55坐标X值U55#5261→G56坐标X值U56#5281→G57坐标X值U57#5301→G58坐标X值U58#5321→G59坐标X值U59(说明:凡是系统变量坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)#7001→G54.1P1X值U1001#7021→G54.1P2X值U1002#7041→G54.1P3X值U1003#7061→G54.1P4X值U1004#7081→G54.1P5X值U1005#7101→G54.1P6X值U1006#7121→G54.1P7X值U1007(说明:凡是坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)参数7851;换刀刀盘旋转速度7810:当前刀具号,(必须与当前刀具号一致)3201:传程式时断开,将从左数2位“0”改成“1”3202:解除“8”“9”字开头的程式保护6031:设定宏变量号保护起始6032:设定宏变量号保护末尾1321:控制机台行程LE: 小于或等于≤【Less then or Equal 】LT: 小于<【Less Then 】GE: 大于或等于≥【Great then or Equal】GT: 大于>【Great Than 】EQ: 等于=【Equal】NE: 不等于≠【Not Equal】WH: 循环【WHILE 】END: 结束IF: 如果GOTO: 跳跃THEN:那么OR: 和AND: 或者ABS: 绝对值G90 G10 L2 P0(公共坐标) X0 Y0 Z0程式里写G90 G10 L2 P0后面带的坐标值会自动输入相应的坐标系里去,例如:G90 G10 L2 P1 (G54)X50 Y10 Z0:程式后面的X50 Y10 Z0,CNC读到这句话后,G54坐标将会是X50 Y10 Z0: G90 G10 L2 P0(公共坐标) X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P3 (G56)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P4 (G57)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P5 (G58)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L2 P6 (G59)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P1(G54.1P1)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P2(G54.1P2)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P3(G54.1P3)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P4(G54.1P4)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P5(G54.1P5)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P6(G54.1P6)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P7(G54.1P7)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L20 P8(G54.1P8)X0 Y0 Z0;含义:(P:坐标号L2 )G90 G10 L10 P1 R95. ;含义:#11001等于95.(P:刀具号R:数值L10 )G90 G10 L11 P2 R95. ;含义:#10002等于95.(P:刀具号R:数值L11 )G90 G10 L12 P3 R95. ;含义:#13003等于95.(P:刀具号R:数值L12 )G90 G10 L13 P4 R95. ;含义:#12004等于95.(P:刀具号R:数值L13 )G10 L52; N3202 R01010001 (开参数)G10 L52; N6031 R650 (开参数)G11; (关参数)刀具长度补偿【H】几何补偿#11001,#11002……#11400磨损补偿#10001,#10002……#10400【补偿号1……400】刀具半径补偿【D】几何补偿#13001,#13002……#13400磨损补偿#12001,#12002……#12400。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CNC常用系统变量
系统变量
#4000:主程式号
#4120:当前刀具号
#3100:数据空(宏变量)
#3004=2 :控制G01进给
#3901:已加工数量
#3902:加工目标数
#3290:第1位=1,宏变量解锁
#3001:计时器单位【毫秒】
#3002:计时器单位【小时】
#3011:机台日期2011.9.12(20110912)
#3012:机台时间9.10.21(091021)
#5023Z值(无法改动的数值)
#5022→当前机械坐标Y值(无法改动的数值)
#5021X值(无法改动的数值)
#5043Z值(无法改动的数值)
#5042→绝对坐标Y值(无法改动的数值)
#5041X值(无法改动的数值)
#5063
#5062 }绝对坐标与当前机械坐标的相对值
#5061
系统变量相对应的坐标系探头代入
系统变量→坐标系→→探头程式
#5201公共坐标X值¤ #5202坐标Y值¤ #5203坐标Z值
#5221→G54坐标X值U54
#5241→G55坐标X值U55
#5261→G56坐标X值U56
#5281→G57坐标X值U57
#5301→G58坐标X值U58
#5321→G59坐标X值U59
(说明:凡是系统变量坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)#7001→G54.1P1X值U1001
#7021→G54.1P2X值U1002
#7041→G54.1P3X值U1003
#7061→G54.1P4X值U1004
#7081→G54.1P5X值U1005
#7101→G54.1P6X值U1006
#7121→G54.1P7X值U1007
(说明:凡是坐标系尾数是“1”表示X值,“2”表示Y值,“3”表示Z值。
)
参数7851;换刀刀盘旋转速度
7810:当前刀具号,(必须与当前刀具号一致)
3201:传程式时断开,将从左数2位“0”改成“1”
3202:解除“8”“9”字开头的程式保护
6031:设定宏变量号保护起始
6032:设定宏变量号保护末尾
1321:控制机台行程
LE: 小于或等于≤【Less then or Equal 】
LT: 小于<【Less Then 】
GE: 大于或等于≥【Great then or Equal】
GT: 大于>【Great Than 】
EQ: 等于=【Equal】
NE: 不等于≠【Not Equal】
WH: 循环【WHILE 】
END: 结束
IF: 如果
GOTO: 跳跃
THEN:那么
OR: 和
AND: 或者
ABS: 绝对值
G90 G10 L2 P0(公共坐标) X0 Y0 Z0
程式里写G90 G10 L2 P0后面带的坐标值会自动输入相应的坐标系里去,例如:G90 G10 L2 P1 (G54)X50 Y10 Z0:
程式后面的X50 Y10 Z0,CNC读到这句话后,G54坐标将会是X50 Y10 Z0: G90 G10 L2 P0(公共坐标) X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L2 P2 (G55)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L2 P3 (G56)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L2 P4 (G57)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L2 P5 (G58)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L2 P6 (G59)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P1(G54.1P1)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P2(G54.1P2)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P3(G54.1P3)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P4(G54.1P4)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P5(G54.1P5)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P6(G54.1P6)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P7(G54.1P7)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L20 P8(G54.1P8)X0 Y0 Z0;含义:(P:坐标号L2 )
G90 G10 L10 P1 R95. ;含义:#11001等于95.(P:刀具号R:数值L10 )
G90 G10 L11 P2 R95. ;含义:#10002等于95.(P:刀具号R:数值L11 )
G90 G10 L12 P3 R95. ;含义:#13003等于95.(P:刀具号R:数值L12 )
G90 G10 L13 P4 R95. ;含义:#12004等于95.(P:刀具号R:数值L13 )
G10 L52; N3202 R01010001 (开参数)
G10 L52; N6031 R650 (开参数)
G11; (关参数)
刀具长度补偿【H】
几何补偿#11001,#11002……#11400磨损补偿#10001,#10002……#10400 【补偿号1……400】
刀具半径补偿【D】
几何补偿#13001,#13002……#13400 磨损补偿#12001,#12002……#12400。