第二章 第一节 圆曲线半径
圆曲线要素及计算公式
第二章圆曲线要素及计算公式
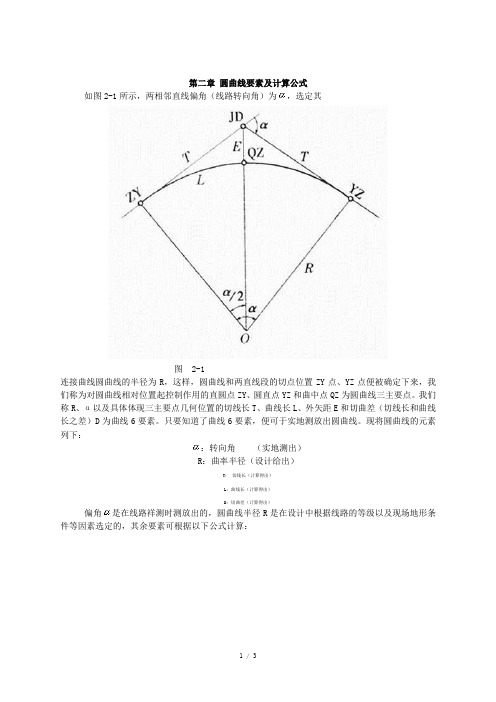
如图2-1所示,两相邻直线偏角(线路转向角)为,选定其
图2-1
连接曲线圆曲线的半径为R,这样,圆曲线和两直线段的切点位置ZY点、YZ点便被确定下来,我们称为对圆曲线相对位置起控制作用的直圆点ZY、圆直点YZ和曲中点QZ为圆曲线三主要点。
我们称R、α以及具体体现三主要点几何位置的切线长T、曲线长L、外矢距E和切曲差(切线长和曲线长之差)D为曲线6要素。
只要知道了曲线6要素,便可于实地测放出圆曲线。
现将圆曲线的元素列下:
:转向角(实地测出)
R:曲率半径(设计给出)
T:切线长(计算得出)
L:曲线长(计算得出)
D:切曲差(计算得出)
偏角是在线路祥测时测放出的,圆曲线半径R是在设计中根据线路的等级以及现场地形条件等因素选定的,其余要素可根据以下公式计算:
温馨提示:最好仔细阅读后才下载使用,万分感谢!。
圆曲线

第十章 曲线测设曲线测设是施工测量中的常用方法,是测量工作的一项重要技术。
它是几何大地测量学中建立国家大地控制网的主要方法之一,也是为地形测图、测量和各种工程测量建立控制点的常用方法第一节 线路平面组成和平面位置的标志铁路与公路线路的平面通常由直线和曲线构成,这是因为在线路的定线中,由于受地形、地物或其他因素限制,需要改变方向。
在改变方向处,相邻两直线间要求用曲线连结起来,以保证行车顺畅安全。
这种曲线称平面曲线。
铁路与公路中线上采用的平面曲线主要有圆曲线和缓和曲线。
如图10-1所示,圆曲线是具有一定曲率半径的圆弧;缓和曲线是连接直线与圆曲线的过渡曲线,其曲率半径由无穷大(直线的半径)逐渐变化为圆曲线半径。
根据铁道部公布的《铁路工程技术规范》规定,在铁路干线线路中都要加设缓和曲线;但在地方专用线、厂内线路及站场内线路中,由于列车速度不高,有时可不设缓和曲线,只设圆曲线。
在地面上标定线路的平面位置时,常用方木桩打入地下,并在桩面上钉一小钉,以表示线路中心的位置,在线路前进方向左侧约0.3 m 处打一标志桩,写明主桩的名称及里程。
所谓里程是指该点离线路起点的距离,通常以线路起点为K 0+000.0。
图10-2中的主桩为直线上的一个转点(ZD ),它的编号为31;里程为K 3+402.31,K 3表示3 km ;402.31 表示公里以下的米数,即注明此桩离开线路起点的距离为3 402.31 m 。
第二节 圆曲线及其测设一、圆曲线概述 (一)圆曲线半径我国《新建铁路测量工程规范》和《铁路技术管理规程》中规定,在正线上采用的圆曲线半径为4000、3000、2500、2000、1800、1500、1200、1000、800、700、600、550、500、450、400和350米。
各级铁路曲线的最大半径为4000米。
Ⅰ、Ⅱ级铁路的最小半径在一般地区分别为1000米和800米,在特殊地段为400米;Ⅲ级铁路的最小半径在一般地区为600米,在特殊困难地区为350米。
道路平面设计之道路平面线形
2 h
l
y
=
l3 6R lh
−
l7 336 ⋅ R 3lh3
l ―回旋线上任一点到 曲线起点的曲线长度
R―主曲线半径 lh ―缓和曲线长度
坐标原点在ZH、HZ
(4)在圆曲线上任意点的坐标公式
ϕm
=
αm
+
β0
=
90
π
⋅ ( 2lm + lh R
)
x = q + R ⋅sin ϕm
y = ΔR + R(1− cosϕm )
三. 缓和曲线
2、缓和曲线的选择
(1)缓和曲线轨迹特点:由直线驶入圆曲线 转弯时,其轨迹上的任一点的曲率半径与其行 程l(自转弯开始点算起)成反比,此轨迹方程 为回旋曲线方程。因此我国《标准》规定缓和 曲线采用回旋曲线。
三. 缓和曲线
(2)缓和曲线的一般方程式:
ρ ⋅l = C
(2-26)
为了设计方便,使量纲一致,故令A2=C,则
一. 直 线
断背曲线:互相通视的同向曲线间若插以短直 线,容易产生把直线和两端的曲线看成为反向曲 线的错觉,当直线过短时甚至把两个曲线看成是 一个曲线,这种线形破坏了线形的连续性,且容 易造成驾驶操作的失误,通常称为断背曲线。
设计中应尽量避免。
一. 直 线
断背曲线
X 直线的计算
一. 直 线
不设超高最小半径(m) 5500 4000 2500 1500 600 350 150
二. 圆曲线
3、平曲线长度(curve radius)
(1)平曲线最小长度规定
① 从驾驶员操纵方便、行车舒适性以及视觉要求来 看,应对平曲线长度加以限制。
高中数学人教B版必修二第二章2.3.1 圆的标准方程课件

奥运五环 日出东方
车行天下
概念形成 问题1:圆的定义是什么?
M
平面内到一定点的距离等于定长的点的轨迹是圆
C·.
圆心C
半径 r 动点M
CM r
概念形成 问题2:根据圆的定义,确定一个圆需要哪些条件?
M r
•C
圆心C 半径r
圆的位置 圆的大小
概念形成
反之,适合这个方程的解为坐标的点 M (x, y) ,
都在 C 上吗?
CM r
概念形成 问题5:两个方程之间有什么关系?
(x a)2 (y b)2 r2
x2 y2 r2
圆心 C(a,b) ,半径 r
圆心 C(0, 0) ,半径 r
概念形成 问题6:圆的标准方程由哪些量决定?方程在结构形式上具有 什么特点?
合作与探究
问题3:类比直线方程的研究方法,如何确定圆的方程?
M
•C
(x a)2 (y b)2 r2 x2 y2 r2
概念形成 问题4:类比直线方程的概念,上述两个方程是圆的方程吗?
y
M r
•C
思
O
x
考
以方程 (x a)2 ( y b)2 r2 推导为例,
我们可以发现
C 上任意一点 M 的坐标 (x, y) 都满足这个方程;
根据两点间的距离公式可得: (x a)2 (y b)2 r
列式
两边平方可得:(x a)2 (y b)2 r2 化简 验证
概念深化(二) 问题8:在平面直角坐标系中,如何判定平面上一个点 M 0 (x0 , y0 ) 与圆 (x a)2 ( y 的b位)2 置 r关2 系呢?
y M2
圆曲线

(3)增加燃料消耗和轮胎磨损
μ 使车辆的燃油消耗和轮胎磨损增加。
横向力系数μ
燃料消耗(%) 轮胎磨损(%)
0
100
100
0.05
105
160
0.10
110
220
0.15
115
300
0.20
120
390
(4)行旅不舒适 μ 值的增大,乘车舒适感恶化。 当μ 〈0.10时,不感到有曲线存在,很平稳; 当μ = 0.15时,稍感到有曲线存在,尚平稳; 当μ = 0.20时,己感到有曲线存在,稍感不稳定; 当μ = O.35时,感到有曲线存在,不稳定; 当μ = 0.40时,非常不稳定,有倾车的危险感。
(4)选用曲线半径时,应注意前后线形的协调,不应 突然采用小半径曲线;
(5)长直线或线形较好路段,不能采用极限最小半径。
(6)从地形条件好的区段进入地形条件较差区段时, 线形技术指标应逐渐过渡,防止突变。
(三)圆曲线最大半径
选用圆曲线半径时,在与地形等条件相适应的前提 下应尽量采用大半径。
圆曲线几何元素为:
α T Rtg
2 L π αR
180 α
E R(sec 1) 2
J 2T L
曲线主点里程桩号计算:
计算基点为交点里程桩号,记为JD,
ZY=JD-T
YZ=ZY+L
QZ=ZY+L/2
JD=QZ+J/2
二、圆曲线半径
(一)计算公式与因素 根据汽车行驶在曲线上力的平衡式计算曲线半径:
μ——横向力系数;
完整高速铁路第二章

结果分析加试验表明
缓和曲线类型 并不是制约行车运行速度的决定性因素, 缓和 曲线的长度 也就是缓和曲线的动力学参数取值,才是影响行 车速度的关键。
考虑到三次抛物线线形简单、设计方便、现场运用经验丰富等特 点,高铁仍以 三次抛物线为首选线型 。困难条件下,缓和曲线不 能保证足够长度时,可采用 三次抛物线圆改善型缓和曲线 。
? 11.8
v2 max
[h ? hq ]
最高速度
(km/h)
200 250 300 350
纯高速线最小圆曲线半径(m)
圆曲线最小半径(课堂PPT)
10
超高横坡度
公路等级 一般地区
汽车专用公路 一般公路
高速 一级 二级 三级 四级 公路 公路 公路 公路 公路
10%
8%
积雪冰
6%
冻地区
11
根据汽车行驶在曲线上力的平衡式计算曲线最小半径:
R V2
127( i)
行车速度
横向力系数
超高横坡度
极限最小半径 最小半径的计算 一般最小半径
不设超高的最小半径
R V2
1202
5569.29m 符合规定
127( i) 127(0.035 0.015)
与《公路工程技术标准》规定相对照。
表5-1
24
考虑了汽车在这种曲线上以设计速度或接近设计速度
行驶时,旅客有充分的舒适感。
推
荐
采
考虑到地形比较复杂的情况下不会过多增加工程量。
用
19
3.不设超高的最小半径 不必设置超高就能满足汽车行驶稳定性的最小半径。
20
三种最小半径的对比
21
例:
22
例:已知某平原区高速公路,其计算行车速度V=120km/h,
一、圆曲线最小半径的重要性
设计合理的圆曲线 设计不良的圆曲线
控制性因素:
实
圆曲线最小半径
例
1
“恐怖的百慕大”——320国道黄花桥路段
设计不合理,最小弯道半
径为250米。
而黄花桥最小弯道半径仅
216米。
The important of circular cu2 rve
二、圆曲线最小半径的计算公式
一般情况,超高
有些情况,路拱
3
F Gv 2 gR
X F cos ih G sin ih
第2讲 圆曲线设计概要
第一节 道路平面设计 第2讲 圆曲线设计
主讲人:于国锋
圆曲线
• 圆曲线半径及其选择
–汽车转弯时的横向稳定性分析
Ga—汽车总重
Y
基 础 工 程 技 术 专 业 课 程
C—离心力
hg—汽车重心高度 α—道路横向坡度角 b —汽车轮距(m) i0—路拱横坡度
道 路 工 程 技 术
脚踏实地 追求卓越
8%
最大超高 6% 4% 不设超高 最小半径( m) 路拱≤2.0% 路拱>2.0%
650
710 810 5500 7500
400
440 500 4000 5250
250
270 300 2500 3350
125
135 150 1500 1900
60
60 65 600 800
30
35 40 350 450
解:根据公式计算得: T=71.6546 L=140.6735 E=8.4386 D=2.6356 曲线主点桩号计算如下: ZY=JD- T=87369.7754 YZ=ZY+ L=87510.4290 QZ=YZ-L/2=87440.0922 JD=QZ+D/2=87441.4100
脚踏实地 追求卓越
极限最小半径
不设超高最小半径
道 路 工 程 技 术
脚踏实地 追求卓越
圆曲线
• 圆曲线半径及其选择
–圆曲线最小半径
例题:高速公路设计车速为V=120km/h,路拱横坡度为2%,若横向力系数采
用0.040。试计算不设超高园曲线最小半径(取500米的整数倍)。 解:根据汽车行驶在曲线上力的平衡方程式: 可计算如下:
圆曲线
2021-2022年高中数学 第二章综合曲线与方程知识精讲 文 北师大版选修1-1
2021-2022年高中数学第二章综合曲线与方程知识精讲文北师大版选修1-1一、教学内容选修1-1 曲线与方程二、教学目标1、理解曲线与方程的概念及进一步认识坐标法的应用。
2、能用直译法、定义法、相关点法等方法求简单的曲线方程。
3、进一步培养学生对数学思想方法的应用能力、推理能力、计算能力。
三、知识要点分析1、曲线的方程与方程的曲线在平面直角坐标系中,曲线C上的点与二元方程f(x,y)=0的实数解建立如下关系:(1)曲线上的点的坐标x,y都是方程f(x,y)=0的解。
(2)以方程f(x,y)=0的解x,y为坐标的点(x,y)都在曲线C上。
则曲线C叫方程f(x,y)=0的曲线,方程f(x,y)=0叫曲线C的方程。
2、求曲线方程的步骤:(1)建系——建立适当的坐标系。
(2)设点——设轨迹上任意点P(x,y)(3)列式——写出满足某种条件的动点P(x,y)的关系式。
(4)代换——将动点P(x,y)转化为f(x,y)=0并化简。
(5)证明——证明所求的方程为符合条件的动点轨迹方程。
3、求曲线轨迹方程的几种常用的方法:求曲线的轨迹方程常采用的方法有直译法、定义法、代入法、参数法。
(1)直译法:是将动点满足的几何条件或者等量关系,直接坐标化,列出等式化简即得动点轨迹方程。
(2)定义法:若动点轨迹的条件符合某一基本轨迹的定义(如椭圆、双曲线、抛物线、圆等),可用定义直接探求。
(3)相关点法:根据相关点所满足的方程,通过转换而求动点的轨迹方程。
【典型例题】考点一:用直译法求曲线的轨迹方程例1:已知A、B为两定点,动点M到A与到B的距离比为正的常数λ,求点M的轨迹方程。
【思路分析】可设|AB|=2a(a>0),然后建立如图所示的坐标系,此时A(-a,0),B (a,0),设M的坐标为(x,y),表示出|MA|,|MB|,根据已知条件得:,然后再化简。
解:建立坐标系如图所示,设M (x ,y )是轨迹上任意一点。
《圆曲线的测设》课件
总结与展望
圆曲线测量的总结
圆曲线测量是交通工程中的重要一环,测量精度和质量对工程建设有重要影响。需要重视和 加强相关人员的培训和管理。
未来圆曲线测量的发展方向
随着科技和工程技术的发展,圆曲线测量也将不断创新和完善。发展方向可能是在测量精度、 测量速度、测量范围等方面进行改进和提升。
参考文献
1. 交通运输部. 道路工程设计规范. 北京: 化学工业出版社, 2018. 2. 中国测绘出版社. 实用测量学手册. 北京: 中国测绘出版社, 2019.
测量要点及方法
圆曲线的要素
圆曲线的要素包括圆半径、 曲线长度、切线长度、切 角和曲率半径等。测量圆 曲线需要准确测量这些参 数。
圆曲线的测量方法
圆曲线测量包括弧长方法、 切线方法和坐标法等多种 方法。选择合适的方法可 提高测量效率和准确度。
水准测量及对高差的 影响
水准测量是圆曲线测量中 的重要一步,它能够实现 高度的测量。同时需要注 意高差对圆曲线测量的影 响。
圆曲线的测设
本PPT课件介绍圆曲线的定义、特点、作用、优点、测量方法、测量工具及 仪器、测量示例和实践案例、注意事项和问题解答、总结与展望。
引言
圆曲线的定义和特点
圆曲线是道路或轨道中的曲线,它呈现出一段弧 线与圆弧的形态。圆曲线具有曲率连续、道路平 稳等特点。
圆曲线的作用和优点
圆曲线在交通路线的建设中具有重要的作用,它 能够缓解路线转弯的限制,实现道路的平稳过渡, 提高行车安全性和车速,同时也节省了土地使用。
圆曲线在实践案例中的应用
圆曲线应用广泛,如铁路中的过弯路段、高速公 路的汇入汇出口等等。这些案例显示了圆曲线在 交通建设中的重要作用和价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二节
圆曲线
不设超高的圆曲线最小半径
表 2-120 路拱 ≤2.0% 100 80 60 40 30 20
5500 4000 2500 1500
600
350
150
不设超 高最小 半径(m) 半径(m)
路拱> 路拱> 2.0%
7500 5250 3350 1900
汽车在平曲线上行驶时, 汽车在平曲线上行驶时,不产生横向倾覆的最小平 曲线半径R 曲线半径 min:
R min V2 ≥ b 127( + ih ) 2h g
V2 µ= − ih 127 R
2.横向滑移条件分析 横向滑移:汽车在平曲线上行驶时,因横向力的存 横向滑移: 汽车在平曲线上行驶时, 可能使汽车沿横向力的方向产生横向滑移。 在,可能使汽车沿横向力的方向产生横向滑移。 横向力大于轮胎和路面之间的横向附着力。 横向力大于轮胎和路面之间的横向附着力。 极限平衡条件: X = Yϕh ≈ Gϕh 极限平衡条件 :
第二节 圆曲线
2.超高横坡度
(1)最大超高横坡度
ib max
考虑汽车在公路上的各种状况特别是兼顾快、 考虑汽车在公路上的各种状况特别是兼顾快、慢车的行驶安全 等必须满足: 等必须满足: (fw —一年中气候恶劣季节路面的横向摩阻系数 ) 一年中气候恶劣季节路面的横向摩阻系数 《规范》对各级公路最大超横坡度的规定见 表2-3 规范》 (2)最小超高横坡度 公路的超高横坡度不应该小于公路直线段的路拱横坡度, 公路的超高横坡度不应该小于公路直线段的路拱横坡度,否则 不利于公路的排水, 不利于公路的排水,因此有
1、横向倾覆平衡条件分析: 横向倾覆平衡条件分析: 倾覆力矩: 倾覆力矩:Xhg 稳定力矩: 稳定力矩:
b b b Y = (Fih + G) ≈ G 2 2 2
横向倾覆平衡条件分析: 横向倾覆平衡条件分析:
倾覆力矩:Xhg 倾覆力矩:
b b b 稳定力矩: 稳定力矩: Y = (Fih + G) ≈ G 2 2 2 b X b 稳定、平衡条件: 稳定、平衡条件: Xh g ≤ G µ= ≤ 2 G 2h g
( 式 2-1)
第二节 圆曲线
在指定车速V 在指定车速V下,最小 横向力系数
Rmin 决定于容许的最大
µmax
和该曲线的最大超高
ib(max) 。
对这些因素讨论如下: 对这些因素讨论如下: 横向力系数 超高横坡度
µ
ib
第二节 圆曲线半径
1.关于横向力系数
横向力系数可近似为单位车重上受到的横向力。 横向力系数可近似为单位车重上受到的横向力。 横向力的存在对行车产生不利影响,而且越大越不利, 横向力的存在对行车产生不利影响,而且越大越不利, 主要表现在以下几方面: 主要表现在以下几方面: 考虑汽车行驶的横向稳定性 考虑驾驶员操作 考虑燃料消耗和轮胎磨损 考虑乘车的舒适性
第二节 圆曲线
δ
无横向力作用 时的轮迹
有横向力作用 时的轮迹
横向力X
横向力X
a)
b)
轮胎横向变形
轮迹的偏移角
图2-3 汽车轮胎的横向偏移角
第二节 圆曲线
(3)考虑燃料消耗和轮胎磨损 由于横向力的影响, 由于横向力的影响,行驶在曲线上的汽车比在直线上的 汽车的燃料消耗和轮胎磨损都要大。 汽车的燃料消耗和轮胎磨损都要大。 (4)考虑乘车的舒适性 汽车行驶在弯道上,随横向力系数值的大小不同, 汽车行驶在弯道上,随横向力系数值的大小不同,乘客 将有不同的感受。 将有不同的感受。 研究表明:的舒适界限,由0.10到0.16随行车速度而变 研究表明:的舒适界限, 0.10到0.16随行车速度而变 设计中对高、低速路可取不同的数值。 化,设计中对高、低速路可取不同的数值。
F= Gv 2 gR
受力分析: 受力分析: 横向力X——失稳 失稳 横向力 竖向力Y——稳定 稳定 竖向力
(二)横向力系数 将离心力F与重力 与重力G分解为平行于汽车路面的横 将离心力 与重力 分解为平行于汽车路面的横 向力X和垂直于路面的竖向力 和垂直于路面的竖向力Y, 向力 和垂直于路面的竖向力 ,
ib,max ≤ fw
ib,m in
ib,m = il in
(il ——路拱横坡度 路拱横坡度) 路拱横坡度
第二节 圆曲线
各级公路圆曲线最大超高值
表2-3
公路等级 一般地区/% 一般地区/% 积雪冰冻 地区/% 地区/%
高速 一级 二级 三级 四级 10 6 8
第一节 圆曲线半径
圆曲线是公路平面设计中最常用的线形之一。 圆曲线是公路平面设计中最常用的线形之一。
第二节
圆曲线
不设超高最小半径是判断圆曲线设不设超高 的一个界限, 的一个界限,当圆曲线半径大于或等于该公路等级 对应的不设超高的最小半径时, 对应的不设超高的最小半径时,圆曲线横断面采用 与直线相同的双向路拱横断面,不必设计超高; 与直线相同的双向路拱横断面,不必设计超高;反 之则采用向内倾斜单向超高横断面形式。 之则采用向内倾斜单向超高横断面形式。
轮胎与路面间的摩阻系数) f 轮胎与路面间的摩阻系数 µ ≤ f (f——轮胎与路面间的摩阻系数
第二节 圆曲线
(2)考虑驾驶员操作 弯道上行驶的汽车,在横向力作用下, 弯道上行驶的汽车,在横向力作用下,轮 胎会产生横向变形, 胎会产生横向变形,使轮胎的中间平面与轮迹 前进方向形成一个横向偏移角, 前进方向形成一个横向偏移角,致使增加了汽 车在方向操纵上的困难,尤其是车速较高时, 车在方向操纵上的困难,尤其是车速较高时, 就更不容易保持驾驶方向上的稳定。 就更不容易保持驾驶方向上的稳定。 汽车轮胎的横向偏移角见图 汽车轮胎的横向偏移角见图2-3
第二章 平 面 设 计
第一节 第二节 第三节 第四节 第五节 第六节 第七节 第八节 第九节 圆曲线半径 圆曲线上的全超高 圆曲线上的全加宽 缓和段 缓和曲线 平曲线最小长度 行车视距 平面线形设计要点 平面设计成果
第一节
圆曲线半径
(一)离心力计算
一、汽车转弯时力的平衡
汽车在平曲线上行驶时会产生离心力, 汽车在平曲线上行驶时会产生离心力,其作用 点在汽车的重心,方向水平背离圆心。 点在汽车的重心,方向水平背离圆心。 离心力
一、圆曲线的几何要素及计算式 圆曲线的几何要素及计算式
切线长:T=R·tanα 切线长 外 距: E=R(secα-1) 式中: 式中: T—切线长 切线长,m; 切线长 E —外距 外距,m; 外距 L—曲线长 曲线长,m; 曲线长 J—切曲差(或校正值),m; 切曲差(或校正值) 切曲差 曲线长:L=Rα 曲线长 切曲差:J=2T-L 切曲差
Gv v X = F − Gih = − Gih = G ( − ih ) gR gR
采用横向力系数来衡量稳定性程度,其意义为单位车 采用横向力系数来衡量稳定性程度, 重的横向力, 重的横向力,即
X v µ= = − ih G gR
2
V2 µ= − ih 127 R
(三)汽车转弯时横向稳定性分析
横向倾覆: 汽车在平曲线上行驶时, 横向倾覆 : 汽车在平曲线上行驶时 , 由于横向力的 作用, 使汽车绕外侧车轮触地点产生向外横向倾覆。 作用 , 使汽车绕外侧车轮触地点产生向外横向倾覆 。 汽车内侧车轮支反力N 汽车内侧车轮支反力N1为0。 倾覆力矩等于或大于稳定力矩。 倾覆力矩等于或大于稳定力矩。
0.15 0.15 0.16
8
8 400
8 250
8 125
8 55
8 30
8 15
圆曲线极限 650 最小半径( 最小半径(m)
第二节
2.一般最小半径 2.一般最小半径
圆曲线
一般最小半径介于极限最小半径和不设超高最小半径之 间。一方面要考虑汽车以设计速度在这种小半径的曲线上行驶 时的安全性、稳定性和旅客有充分的舒适性, 时的安全性、稳定性和旅客有充分的舒适性,另一方面也要注 意到在地形比较复杂的情况不会过多的增加工程数量。 意到在地形比较复杂的情况不会过多的增加工程数量。 确定一般最小半径时,横向力系数μ和超高横坡度ib没有 确定一般最小半径时,横向力系数μ和超高横坡度i 取到极限最大值,都留有一定的余地。通常在路线设计时, 取到极限最大值,都留有一定的余地。通常在路线设计时,圆 曲线半径应尽量采用大于或等于一般最小半径。 曲线半径应尽量采用大于或等于一般最小半径。 《标准》规定了“一般最小半径”, 表2-5。 标准》规定了“一般最小半径”
R—圆曲线半径 圆曲线半径,m; α —转角 转角,(°) 圆曲线半径 转角
第二节
圆曲线
表 2-4
圆曲线极限最小半径
设计速度 (Km/h) Km/h) 横向力系数 µmax 超高值 ib(max)(%) max) 120 0.10 100 0.12 80 0.13 60 40 30 20 0.17
700
400
200
100
65
30
第二节
3.不设超高的最小半径 3.不设超高的最小半径
圆曲线
在设计速度一定时,当圆曲线半径较大时,离心力就比较小, 在设计速度一定时,当圆曲线半径较大时,离心力就比较小, 此时弯道即使采用与直线相同的双向路拱断面时,离心力对外 此时弯道即使采用与直线相同的双向路拱断面时, 侧车道上行驶的汽车的影响也很小;因此我国《标准》制 侧车道上行驶的汽车的影响也很小;因此我国《标准》 6 所示。 制定了“不设超高的最小半径” 制定了“不设超高的最小半径”,如 表2—6 所示。此时横向 力系数μ=0.035 0.015。 力系数μ=0.035 和横坡度 i = 0.015。
第二节
圆曲线
圆曲线一般最小半径
表 2--5
设计速度 (km/h) km/h) 横向力系数 µ 超高值i 超高值ib (%) 120 0.05 6 100 0.05 6 80 0.06 7 60 0.06 8 40 0.06 7 30 0.05 6 20 0.05 6