多站时差频差高精度定位技术
三站时差定位GDOP影响因素分析
50
指挥信息系统与技术
2021 年 6 月
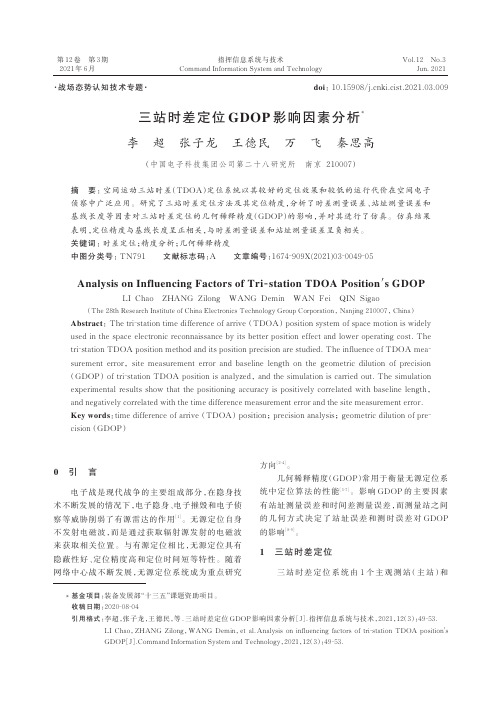
2 个 辅 观 测 站(辅 站)组 成 。 三 站 时 差 定 位 模 型 如 图 1 所 示 ,地 固 坐 标 系 中 ,主 站 位 置 为 S0 ( x0,y0,z0 ), 辅 站 1 位 置 为 S1 ( x1,y1,z1 ),辅 站 2 位 置 为 S2 ( x2,y2,z2 ),目标位置为 T ( x,y,z )。
图 三站时差定位模型 1
设目标发射的雷达探测波到达观测站的时间为 tTOA,tTOA0 为 雷 达 探 测 波 到 达 主 站 的 时 间 ,tTOA1 为 雷 达 探 测 波 到 达 辅 站 1 的 时 间 ,tTOA2 为 雷 达 探 测 波 到 达 辅 站 2 的 时 间 ,因 此 目 标 发 射 的 雷 达 探 测 波 到 达 主站与辅站 1 的时间差为 Δt1 = tTOA1 - tTOA0,到达主 站 与 辅 站 2 的 时 间 差 为 Δt2 = tTOA2 - t 。 TOA0 令 目 标 与观测站的距离如下:
éδ ê
2 ΔR
1
+
2δ2
0
0ù ú
êê 0 ê
δ2 ΔR2
+
2δ2
0úú ú
ë0
(3)
其 中 ,L、B 和 H 分 别 为 目 标 的 经 度 、纬 度 和 高 程 ;N
为 目 标 当 地 卯 酉 圈 半 径 ,随 纬 度 B 缓 慢 变 化 ;e 为 第
一偏心率 。 [10]
一 般 情 况 下 ,由 式(2)和 式(3)联 立 方 程 组 是 无
法 求 解 的 ,只 有 在 进 行 高 程 假 设 后 方 程 组 才 可 求
2 0z
编队卫星时差频差复合定位技术研究
分布式 网络卫星是当前微小卫星研究和应用的一项新
间的相对位置( 基线长度 、方位角和仰角) 进行高精度测
控 ,只要其 三维位 置误差为5~1 米 ,便可利用功能协 O
技术 ,通过修改基线或星间的相对位置 ,可达到优化其拓 扑结构 目的,使最佳测量定位基线组合得以实现。将其具 体应用到编队分布式卫星定位系统中,不但可提供分布式 三维编队飞行的轨道几何关系 ,还可为定位系统提供完善 的定位基线体系,满足定位所需的最佳网络拓扑结构。
卫星为基准 ,由若干颗微小卫星围绕其构成一个特定形 状 ,这个特定几何形状结构 的各颗微小卫星一方面保持
这个形 状 ,同时又绕地 球 中心 旋转 ,它 们 当中每颗小
多个定位接收机 ,对地球表面的发射源( 辐射源) 进行定
位 。在实现整个定位功能时 ,需要多颗卫星利用功能与 结构协同分布 ,通过检测地面辐射源到各星 的时差 和频
可写 为 :
X = r x1p R ) (-) ag ma [ ( 】 43 n
勒(D ) F OA 复合 与综合定 位 ;b 多维基线复合与综合定 . 位 ,多基线复合与综合定位 。 ( 4)定位基线体系构成。在定位过程 ,综合采用 :
线相结合 ,提高定位精度。④利用定位基线平面可转动
特点 ,可实现对敌 目标的低角跟踪测量定位 ,增大覆盖
范 围和连续监视时间。⑤可提供一定长度和一定数量 的
定位基线 ,实现对 目标 的三维定位 。⑥避 开卫星姿态控 制精度要求高的技术难 点。
合 ,对卫星姿态精度要求较低 ,而利用微小卫星进行编队
性 .从 而 为此 项技 术 的深入 研 究提 供 了依 据 。
关 键 词 :编 队 卫 星 ;综 合 定位 ;时差 定 位 ;频 差 定位 ;定位 精 度
高精度导航与定位系统设计
高精度导航与定位系统设计导航与定位系统的快速发展对人们的生活和工作方式带来了革命性的变化。
高精度导航与定位系统是现代社会中不可或缺的一部分,广泛应用于航空航天、智能交通、精准农业、地理测绘等领域。
本文将详细介绍高精度导航与定位系统的设计原理、技术要点以及应用领域。
1. 设计原理高精度导航与定位系统主要依靠卫星导航技术和地面基站数据传输实现。
具体来说,高精度导航与定位系统的设计原理由以下三个方面构成:1.1 卫星导航系统卫星导航系统采用全球定位系统(GPS)或其他类似的系统(如伽利略、北斗),通过卫星信号的接收和测量来确定接收器的位置和速度。
这些卫星通常以固定位置的星座布局在地球上空,通过接收器与卫星之间的通信,定位卫星和接收器之间的距离并计算接收器的位置信息。
卫星导航系统的设计原理主要包括卫星轨道计算、信号接收与处理以及位置解算等。
1.2 数据传输与处理高精度导航与定位系统通过地面基站传输数据到用户设备,实现实时导航和定位功能。
基站通过无线网络将数据传输到用户设备,用户设备则通过接收并处理这些数据来计算其精确位置。
数据传输与处理的设计原理主要包括无线通信协议、数据压缩与加密以及数据传输优化等。
1.3 多传感器融合为了进一步提高导航与定位系统的精度和稳定性,多传感器融合技术被广泛应用。
通过将不同类型的传感器数据进行融合,例如惯性测量单元(IMU)、地磁传感器、气压传感器等,系统可以更准确地估计位置和姿态。
多传感器融合的设计原理主要包括传感器数据融合算法、滤波和校准技术以及误差预测与修正等。
2. 技术要点在高精度导航与定位系统的设计过程中,需要关注以下几个关键技术要点:2.1 高精度数据采集高精度导航与定位系统依赖于精确的数据采集。
所使用的传感器和测量设备需要具备高精度、高灵敏度、低功耗等特点。
同时,采集到的数据需要经过有效的去噪和滤波处理,以确保数据的准确性和可靠性。
2.2 信号处理与解算高精度导航与定位系统需要对接收到的信号进行实时处理和解算。
GPS差分测量与精度提升的技巧与方法
GPS差分测量与精度提升的技巧与方法导语:在现代社会中,GPS(全球定位系统)已经成为人们日常生活中不可或缺的工具之一。
然而,GPS定位的准确度始终是一个备受关注的话题。
本文将介绍GPS差分测量的原理、精度提升的技巧与方法,并探讨其在不同领域的应用。
一、GPS差分测量的原理GPS差分测量是通过同时接收卫星信号的基准站和移动站之间的差分计算,来消除大气延迟、钟差、电离层误差等因素对定位精度的影响。
差分测量的基本原理是基准站和移动站所接收到的相同卫星信号之间的误差可以近似为常数,从而可以通过计算差分值来消除这些误差。
二、提升GPS精度的技巧与方法1. 使用更多的卫星定位精度与可见GPS卫星数量成正比。
因此,在测量中尽可能使用更多的卫星能够提高测量的准确度。
此外,选择高高度角的卫星也可以提高定位的精度。
2. 改善接收环境GPS接收器在复杂的环境中容易受到遮挡和干扰,如高楼大厦、树木、山脉等。
为了提高定位精度,应尽量选择开阔的地方进行测量,避免以上因素对信号的干扰。
3. 准确校正时钟差时钟差是影响GPS定位精度的重要因素之一。
通过准确校正接收器的时钟差,可以消除由于时钟误差引起的定位偏移。
一般来说,使用高质量的GPS接收器和精密的时钟校准设备可以提高定位的准确性。
4. 运用差分增强技术除了普通的差分测量,还可以运用差分增强技术来提升GPS测量的精度。
差分增强技术包括RTK(实时动态差分)和PPK(后处理差分)技术,能够在实时性和准确性方面提供更高的性能。
三、差分测量在不同领域的应用1. 土地测量在土地测量中,差分测量可以提供更精确的坐标和高程数据,有助于绘制详细的地形图和土地界址证明。
这对于土地规划、土地管理和土地交易具有重要意义。
2. 船舶导航差分测量在船舶导航中也具有广泛的应用。
通过使用差分定位系统,船舶可以精确定位,并能够避免与其他船只或障碍物的碰撞。
这对于海上运输和船舶安全至关重要。
3. 农业管理农业管理是另一个差分测量的应用领域。
多站无源时差定位精度分析

多站无源时差定位精度分析邢翠柳;陈建民【摘要】针对在多站无源时差定位系统中影响目标定位精度的因素,分析了时差测量误差和站址误差对目标定位精度的影响。
影响时差测量精度的因素有接收机热噪声、多普勒效应、站间同步误差、本地时钟误差和大气等因素。
通过分析各个因素对目标定位精度的影响程度,在特定布站方式下,仿真计算得到在固定时差测量误差和站址误差下可能达到的目标定位精度,并根据主要误差来源提出相应的提高定位精度的措施。
%Aiming at the factors which affect on the positioning accuracy of TDOA passive location by multi-station,this paper analyzes the influence on target positioning accuracy by error in time difference measurement and station locations.The influence factors on time measurement accuracy include Johnson noise of receiver,Doppler effect,error on time synchronization between stations,local clockerror,influence by atmosphere and so on.The positioning accuracy is got in special station location with error in time difference measurement and station location by simulation.The methods of improving the accuracy of positioning accuracy are given.【期刊名称】《无线电工程》【年(卷),期】2012(042)002【总页数】4页(P32-34,48)【关键词】时差定位;定位精度;时差测量误差;站址误差【作者】邢翠柳;陈建民【作者单位】中国电子科技集团公司第五十四研究所,河北石家庄050081;中国电子科技集团公司第五十四研究所,河北石家庄050081【正文语种】中文【中图分类】TP960 引言多站无源时差定位(TDOA)又称为双曲线定位,是一种重要的无源定位方式,是通过处理3个或更多观测站采集到的信号到达时间测量数据对辐射源进行定位的。
多基站时差频差无源定位处理方法研究

多基站时差频差无源定位处理方法研究多站无源定位技术是电子侦察、电子对抗的一个重要问题,被广泛应用于雷达、导航、声纳、警戒、无线通信、分布式传感器网络等领域。
相对于有源定位系统,无源定位系统具有隐蔽性好、抗干扰能力强、探测距离远等优点。
相对于简易的单站无源定位系统,多站无源定位系统能够综合利用多组观测信息,实现对目标的高精度联合定位。
本文对多站的时差定位(Time Difference Of Arrival,TDOA)、频差(Frequency Difference Of Arrival,FDOA)和时差联合定位、存在基站误差的时差定位等问题进行了研究。
基于TDOA和FDOA的定位问题是高度非线性的,并且相应的目标代价函数具有非凸特征,这样定位问题并不能够简单直接求解。
定位问题的解决方法按照类型可以划分为线性化解法和非线性化解法。
目前大多数研究主要侧重于线性化解法,这些方法通过线性化非线性的TDOA和FDOA方程组来求解目标位置,特点是计算量小,在噪声较小时定位精度能够达到克拉美罗界(Cramer-Rao Bound,CRLB)。
但线性化非线性方程组必然会带来性能上的损失,即在噪声功率达到一定程度时定位误差快速增加,且定位精度远离CRLB。
本文采用非线性的解法求解TDOA定位问题,相对于线性化解法性能更好,在大噪声环境下定位精度更高。
针对非线性解法在初始值选取较差时,算法容易发散的缺点,提出了一种修正牛顿算法(Modified Newton,MNT)。
MNT算法对初值选取不敏感,即在较差初始值时,MNT算法依然能够精确地收敛到目标位置。
对于运动平台的TDOA和FDOA联合定位问题,提出了一种基于时差、频差的两步牛顿算法,将原迭代算法中位置和速度变量的初值选取问题转化为仅位置变量的初值选取问题。
对于存在接收基站误差的TDOA定位问题,提出了一种基于基站误差的两步牛顿算法,该算法减少了由基站位置误差带来的高维Hessian矩阵求逆运算次数,实验结果表明基于基站误差的两步牛顿算法具有更快的收敛速度,并明显降低了运算量。
空间三重差分

空间三重差分
空间三重差分是一种用于高精度定位的技术。
它是基于GPS技术的三重差分技术的改进,可以提高位置测量的精度和可靠性。
下面详细介
绍空间三重差分的原理、优点和应用。
一、原理
空间三重差分是利用多个GPS接收机同时接收来自卫星的信号,并通过计算这些信号之间的相对时间差来确定位置。
具体来说,它利用了
卫星信号在传输过程中受到大气层等因素影响而发生的误差,并通过
多次测量和计算来消除这些误差,从而提高定位精度。
二、优点
1. 高精度:相比于普通GPS技术,空间三重差分可以提高定位精度,达到厘米级别。
2. 可靠性强:由于使用多个接收机同时接收信号并进行计算,所以即
使某个接收机出现故障或受到干扰,也不会影响整个系统的正常工作。
3. 适用范围广:空间三重差分不仅适用于陆地上的测量,还可以在海
洋、天空等环境中进行高精度定位。
4. 实时性好:空间三重差分可以实现实时定位,适用于需要及时获取位置信息的应用场景。
三、应用
1. 海洋测量:空间三重差分可以用于海洋测量中,如船舶定位、海底地形测量等。
2. 精准农业:空间三重差分可以用于农业领域的作物生长监测、施肥管理等。
3. 航空航天:空间三重差分可以用于飞机、卫星等航空航天领域中的精确定位和导航。
4. 地震监测:空间三重差分技术可以用于地震监测和预警,提高地震灾害的预防和应对能力。
总之,空间三重差分技术是一种高精度定位技术,在多个领域有着广泛的应用前景。
高精度卫星定位技术误差分析与改进策略

高精度卫星定位技术误差分析与改进策略高精度卫星定位技术是现代导航和地理信息系统中的关键技术之一,它通过接收卫星信号来确定接收器在地球上的精确位置。
随着科技的发展,高精度卫星定位技术在各个领域,如测绘、交通、农业、事等,都发挥着越来越重要的作用。
然而,这项技术在实际应用中仍然面临着多种误差源,这些误差源可能会影响到定位的精度和可靠性。
本文将探讨高精度卫星定位技术中的误差分析,并提出相应的改进策略。
一、高精度卫星定位技术概述高精度卫星定位技术主要依赖于全球导航卫星系统(GNSS),如的全球定位系统(GPS)、俄罗斯的格洛纳斯(GLONASS)、欧洲的伽利略(Galileo)和中国的北斗导航系统(BDS)。
这些系统通过发射卫星信号,使得地面接收器能够计算出其位置、速度和时间。
1.1 卫星定位技术原理卫星定位技术基于三角测量原理,即通过测量接收器与至少四颗卫星之间的距离,来确定接收器在三维空间中的位置。
接收器通过计算信号传播时间来确定距离,而信号的传播时间与卫星和接收器之间的距离成正比。
1.2 定位技术的应用场景高精度卫星定位技术在多个领域有着广泛的应用,包括但不限于:- 测绘工程:用于地形测绘、土地规划和工程建设。
- 交通导航:提供车辆定位、路线规划和实时导航服务。
- 精准农业:指导农业机械进行精确播种、施肥和收割。
- 事应用:用于定位、导航和武器制导。
二、高精度卫星定位技术的误差分析尽管高精度卫星定位技术在理论上可以提供非常精确的位置信息,但在实际应用中,多种误差源会影响定位的精度。
2.1 卫星误差卫星误差主要包括卫星轨道误差和卫星钟差。
卫星轨道误差是由于卫星轨道模型与实际轨道之间的偏差造成的,而卫星钟差则是由于卫星时钟与标准时间之间的偏差造成的。
2.2 信号传播误差信号传播误差主要包括电离层延迟和对流层延迟。
电离层延迟是由于卫星信号在通过电离层时受到电子密度变化的影响,导致信号传播速度的变化。
对流层延迟则是由于信号在通过对流层时受到温度、湿度和大气压力变化的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关 键 词 : 源 定位 ; 差 ; 无 时 多普 勒 频 差 ; rme— a C a rR o下界
中 图 分 类i e o ain w t u t sa in Usn DOA/ DOA M e s r me t t rL c t i M l —t t i gT t o h i o F au e n s
An a p o c o r v d n i h y a c r t p r a h f rp o i i g h g l c u a e FDOA s i t s o h o e e tr d r p l et a n i e tma e ft e c h r n a a u s r i s
出了利 用相 参 脉 冲 串实现 雷达 信 号 高精 度 频 差 测 量 方 法 , 导 了无 模 糊 频 率估 计 的 充要 条 件 及 相 参 脉 冲 串测频 推
的 C L 仿 真及 实验 室 测试 结 果证 明 了在 一 定 条件 下 可 实 现 对相 参 雷 达信 号 的 Hz 测 量 精 度 , 工 程应 用具 R B, 级 对
摘 要 : 对 多站 时 差 频 差 联 合 定 位 系统 , 针 建立 了 定位 模 型 , 导 了定 位 误 差表 达 式 并 作 了仿 真 分析 。仿 真 结 果表 推
明, 观测站构型较差的情况下 , 在 多站 时 差频 差联 合 定位 与 纯 时 差 或频 差 定位 相 比 可提 高定 位 精 度 。 文 同时提 本
Z u Weq a g ,H u n ia g ,Ma Qi Xi h iin a g Pek n n ,L n
( .No 8 1 s ac n t ue,Chn r s a eS in ea d Id sr r o ain,Na j g,2 0 0 ,Chn ; 1 . 5 1Re e rh I si t t ia Ae o p c ce c n n u tyCo p r to ni n 10 7 ia
多 站 时差 频 差 高精 度定 位 技术
朱 伟 强 黄 培 康 。 马 琴 卢 鑫
(. 国 航 天 科 工 集 团 8 1 研 究 所 , 京 , 1 0 72 中 国航 天 科 工 集 团 科 技 委 员 会 , 京 ,0 8 4 1中 5l 南 2 0 0 ;. 北 105)
p o o e .B t h f( e e s r n u f in )c n iin o n mbg o sfe u n ye tma rp sd o ht ei n c s a ya ds fi e t o dt sfru a iu u rq e c si — f c o t n a d t eCr m6 - o lwe o n ( i n h a rRa o r b u d CRLB)a e p e e td Sm ua in a d lb tsi g r— o r r s n e . i lto n a e t e n
B i l t n,i i d mo sr td t a h o ie y smu ai o t s e n ta e h tt e c mbn d TDOA/ FDOA e h iu u p ro ms i tc nq eo t e fr t s
TDOA— nl o y or FDOA— l o on y c unt r rs,e e n t a e o oo o l c o —a ge ome r e pa t v n i he c s f p r c le t r t r tge t y.
2 Th ce c n c n l g o . e S in e a d Te h o o y C mmit e t e ,Ch n r s a e S in e a d I d s r r o a i n, i a Ae o p c ce c n n u ty Co p r t o
第 2卷 第 3 5 期
21 0 0年 5月
数
据
采
集
与
处
理
V o1 5 N o.3 .2 M a O1 y2 O
i r c sig J u n lo t q iio & P o e sn o r a fDa a Ac ust n
文 章 编 号 : 0 4 9 3 ( 0 0 0 — 3 70 1 0 — 0 7 2 1 ) 30 0 — 6
( TDO A )a d fe u n yd fe e c fa rv l( n r q e c i rn eo ria FDOA )i e tb ih d f rt e mu t—tto o i f s sa l e o h li ain p s— s s
to y t ms,a d f r u a o s i tn he u e t i is i he e te oc to r e i d. in s se n o m l s f r e tma i g t nc r ante n t mit rl a i n a e d rve
Bej g,1 0 5 ,Chn ) in i 084 ia
Ab ta t sr c :Th lo i m d lo h on — o iinn a e n tme d fee c f a rv l e ag rt h mo e f t e ji tp st ig b s d o i i r n e o ria o ' f