用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程
用平面二连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程分析

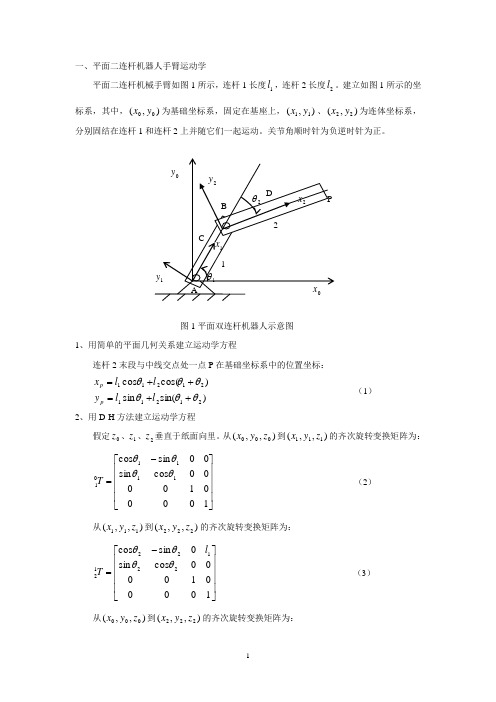
一、平面二连杆机器人手臂运动学平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。
建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。
关节角顺时针为负逆时针为正。
图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标:)sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1)2、用D-H 方法建立运动学方程假定0z 、1z 、2z 垂直于纸面向里。
从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100010000cos sin 00sin cos 111101θθθθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100010000cos sin 0sin cos 2212212θθθθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⋅=10000100sin 0)cos()sin(cos 0)sin()cos(1000010000cos sin 0sin cos 1000010000cos sin 00sin cos 112121112121221221111120102θθθθθθθθθθθθθθθθθθl l l T T T (4)那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⋅=110)sin(sin )cos(cos 10010000100sin 0)cos()sin(cos 0)sin()cos(212112121121121211121212020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5)即,)sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6)与用简单的平面几何关系建立运动学方程(1)相同。
简述机器人雅可比矩阵的概念

简述机器人雅可比矩阵的概念机器人雅可比矩阵是机器人控制理论中的一个重要概念,它描述了机器人末端执行器在关节空间和笛卡尔空间中的运动学关系。
本文将从机器人运动学的基本概念入手,介绍雅可比矩阵的定义、性质和应用,以及在机器人控制中的重要作用。
一、机器人运动学基本概念机器人运动学是研究机器人运动规律和运动参数的学科,它是机器人控制理论的重要组成部分。
机器人运动学主要分为正运动学和逆运动学两个部分。
正运动学是指通过机器人关节角度计算机器人末端执行器的位置和姿态,即把关节空间的运动状态转换为笛卡尔空间的运动状态。
逆运动学则是指通过机器人末端执行器的位置和姿态计算机器人关节角度,即把笛卡尔空间的运动状态转换为关节空间的运动状态。
正逆运动学是机器人控制中的基本问题,也是机器人实际应用中必须解决的问题。
机器人运动学中的基本概念包括机器人坐标系、机器人关节角度、机器人末端执行器的位置和姿态等。
机器人坐标系是机器人运动学中的一个基本概念,它是描述机器人运动状态的基础。
机器人坐标系可以分为基座坐标系和工具坐标系两种类型。
基座坐标系是机器人的固定参考系,通常与机器人底座相对应。
工具坐标系则是机器人末端执行器的参考系,通常与机器人末端执行器的位置和姿态相对应。
机器人关节角度是机器人运动学中的另一个基本概念,它是描述机器人关节运动状态的参数。
机器人关节角度通常用关节角度向量表示,例如q=[q1, q2, ..., qn]T,其中n是机器人关节数量。
机器人关节角度向量是机器人控制中的重要参数,它可以用来控制机器人的关节运动状态。
机器人末端执行器的位置和姿态是机器人运动学中的另一个基本概念,它是描述机器人末端执行器运动状态的参数。
机器人末端执行器的位置通常用位置向量表示,例如p=[x, y, z]T,其中x、y、z 是机器人末端执行器在笛卡尔空间中的位置坐标。
机器人末端执行器的姿态通常用姿态矩阵或欧拉角表示,例如R=[r11, r12, r13; r21, r22, r23; r31, r32, r33],其中r11、r12、r13、r21、r22、r23、r31、r32、r33是姿态矩阵的元素。
机器人运动学雅可比矩阵

05 雅可比矩阵的优化与改进
雅可比矩阵的稳定性分析
稳定性分析的重要性
在机器人运动控制中,雅可比矩阵的稳定性对机器人的运动性能 和动态响应具有重要影响。
稳定性判据
通过分析雅可比矩阵的特征值和特征向量,可以确定机器人的运动 稳定性,并为其运动控制提供依据。
通常使用齐次变换矩阵来表示机器人的位姿,该矩阵包含 了平移和旋转信息,能够完整地描述机器人在空间中的位 置和方向。
坐标系与变换
01
坐标系是用来描述物体在空间中位置和姿态的参照框架。
02
在机器人学中,通常使用固连于机器人基座的坐标系作为全局 参考坐标系,以及固连于机器人末端执行器的坐标系作为局部
参考坐标系。
THANKS FOR WATCHING
感谢您的观看
雅可比矩阵的物理意义
雅可比矩阵描述了机械臂末端执行器 的位置和姿态随关节变量变化的规律, 是机械臂运动学分析中的重要概念。
通过雅可比矩阵,可以分析机械臂的 可达工作空间、奇异性、运动速度和 加速度等运动学性能。
雅可比矩阵的计算方法
雅可比矩阵可以通过正向运动学和逆 向运动学两种方法计算得到。
在计算雅可比矩阵时,需要使用到线 性代数、微分方程等数学工具。
正向运动学是根据关节变量求解末端 执行器在参考坐标系中的位置和姿态; 逆向运动学是根据末端执行器的位置 和姿态求解关节变量。
04 雅可比矩阵在机器人运动 学中的应用
机器人的关节与连杆
关节
机器人的每个关节都有一个自由 度,决定了机器人的运动方式。 常见的关节类型包括旋转关节和 移动关节。
连杆
(完整版)用平面二连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程
一、平面二连杆机器人手臂运动学平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。
建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。
关节角顺时针为负逆时针为正。
图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标:)sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1)2、用D-H 方法建立运动学方程假定0z 、1z 、2z 垂直于纸面向里。
从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100010000cos sin 00sin cos 111101θθθθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100010000cos sin 0sin cos 2212212θθθθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⋅=10000100sin 0)cos()sin(cos 0)sin()cos(1000010000cos sin 0sin cos 1000010000cos sin 00sin cos 112121112121221221111120102θθθθθθθθθθθθθθθθθθl l l T T T (4)那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⋅=110)sin(sin )cos(cos 10010000100sin 0)cos()sin(cos 0)sin()cos(212112121121121211121212020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5)即,)sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6)与用简单的平面几何关系建立运动学方程(1)相同。
机器人雅可比矩阵
机器人雅可比矩阵简介机器人雅可比矩阵(Robot Jacobian Matrix)是机器人运动学中的重要概念之一。
它描述了机器人末端执行器的速度与关节速度之间的关系,是机器人运动方程求解、运动规划和控制的基础。
本文将详细介绍机器人雅可比矩阵的定义、性质以及它在机器人学中的应用。
定义在介绍机器人雅可比矩阵之前,我们先回顾一下机器人运动学的基本概念。
假设有一个机器人系统,它由n个自由度的关节组成,每个关节的转动由关节角度表示。
而机器人的末端执行器的位置和姿态可以通过正向运动学求解得到,位置用笛卡尔坐标表示,姿态用旋转矩阵或四元数表示。
机器人雅可比矩阵描述了机器人末端执行器的速度与关节速度之间的关系。
具体来说,设机器人关节速度为q_dot,末端执行器速度为x_dot,机器人雅可比矩阵为J,那么雅可比矩阵满足以下关系:x_dot = J * q_dot性质机器人雅可比矩阵具有以下几个重要的性质:1.雅可比矩阵的维度为6×n,其中6表示笛卡尔坐标的维度,n表示机器人的自由度数。
2.雅可比矩阵是一个矩阵函数,它的元素可以表示为:J_ij = ∂f_i / ∂q_j其中,f_i表示末端执行器的第i个度量值,q_j表示第j个关节角度。
3.雅可比矩阵的每一列表示末端执行器在各个关节速度方向上的运动灵敏度。
如果某列的元素值较大,说明在该关节角度变化时,末端执行器的运动会更加敏感。
4.雅可比矩阵的秩决定了机器人在不同姿态下所能达到的运动自由度。
如果雅可比矩阵的秩小于n,那么机器人在某些姿态下会出现奇异配置,并且无法实现所需的末端执行器速度。
应用机器人雅可比矩阵在机器人学中有着广泛的应用。
下面介绍几个常见的应用场景:逆运动学求解在机器人学中,逆运动学是指已知末端执行器的位置和姿态,求解机器人关节角度的过程。
雅可比矩阵在逆运动学求解中起到了关键作用。
通过雅可比矩阵的逆矩阵,可以将末端执行器的速度映射到关节速度空间中,进而求解出关节速度。
工业机器人复习重点资料
题型:填空名词解释简答计算第一章定义:机器人是一种用于移动各种材料、零件、工具或专用装置,通过可编程序动作来执行种种任务并具有编程能力的多功能机械手。
特征:1)机器人的动作机构具有类似于人或其他生物体某些器官(肢体、感官等)的功能2)机器人具有通用性,工作种类多样,动作程序灵活多变。
3)机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4)机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
1.2工业机器人与数控机床有什么区别?1)机器人的运动为开式运动链而数控机床为闭式运动链2)工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统3)工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工;4)机器人灵活性好,数控机床灵活性差。
1.4说明工业机器人的基本组成及三大部分之间的关系答:工业机器人由三个部分,六个子系统组成,这三个部分分别是机械部分、传感部分、控制部分;六个子系统分别是驱动系统、机械系统、感知系统、控制系统、机器人-环境交互系统和人机交互系统等。
他们的关系如下图所示:人机履叙|Jsta+s宦*»31.5简述下面几个术语的含义:自由度、重复定位精度、工作范围、最大工作速度、承载能力。
芥:门市度是机器人所典仃的独立坐标运动的数目,不包括于爪(衣瑞执行器)的开介门由度*重宣定位精度是关于精度的统计数据,指机器人重良到达某一确定位置准确的概率,是蛋复同…位置的范围.可以用各次不同位置平均值的偏差來表示•工作范围是指机器人乎臂末端或手腕中心所能到达的所有点的渠合,也叫工作区域。
「•作速度一般指最大T作速度,可以足指口由度匕最大的稳定速度,也可以定义为于臂末端垃人的合成速度〔通常在技术参数中加以说明人承我能力是指机器人在工作范尉内的任何位姿匕所能承受的址大质晟.从运动学的观点看,完成一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
1.9工业机器人怎样按控制方式来分类?点位控制连续轨迹控制补充:按机器人的结构形式分类1、按坐标形式分类直角坐标型机器人、圆柱坐标型机器人球坐标型机器人、关节坐标型机器人2、按控制方式来分类点位控制连续轨迹控制3、按驱动方式分类气力驱动式、液力驱动式、电力驱动式、新型驱动式工业机器人的机械系统由机身、手臂、末端执行器三大件组成。
机器人题库(带答案)
机器人题库〔带答案1.abb机器人属于哪个国家?〔CA.美国B中国C瑞典D日本2.机器人控制柜发生火灾,用何种灭火方式合适?〔BA.浇水B二氧化碳灭火器C泡沫灭火器D毛毯扑打3.在何处找到机器人的序列号?〔BA控制柜名牌B示教器C操作面板D驱动板4.abb机器人的额定电压是多少?DA24vB36v C110v D380v5.安川机器人属于哪个国家?〔AA日本C挪威C俄罗斯D美国6.abb可以允许有几个主程序main〔AA一B二C三D四7.在哪个窗口可以改变操作时的工具〔BA程序编辑器B手动操作C输入输出D其它窗口8.哪条指令用来等待数字输入信号〔A AWaitDiBWaitDoCDiWaitDWaitTime9.精确到达工作点用那个zone〔DAz1Bz50Cz100DFine10.哪个zone可获得最圆滑路径〔DAz1BZ5Cz10Dz10011.哪个指令可最方便回到六轴的校准位置?〔CAMoveL BMoveJ CMoveAbsJ DArcL12.机器人速度是那个单位〔C?A.cm/minB.in/minC.mm/secD.in/sec13.哪条指令将数字输出信号置1 〔CA SetB ResetC SetAOD PulseDo14.用何功能保存模块〔 BA 程序另存为B另存模块为C另存工具为D系统另存为15.在哪个窗口可以定义机器人输入输出〔CA 程序编辑器B 手动操作C 输入输出D 控制面板16.在哪个窗口可以标定机器人的零位〔CA程序编辑器 B 手动操作 C 校准 D 控制面板17.在哪个窗口可以看到故障信息〔CA 程序数据B 控制面板C 事件日志D 系统信息18.在急停解除后,在何处复位可以使电机上电〔AA控制柜白色按钮 B 示教器 C 控制柜内部 D 机器人本体19.机器人手动操作时,示教使能器要一直按住〔√20机器人四大家族是发那科,安川电机,abb ,酷卡〔√21机器人工作时,工作范围可以站人〔X22机器人不用定期保养〔X23机器人可以做搬运,焊接,打磨等项目〔√24机器人可以有六轴以上〔√25程序模块只能有一个〔X26对机器人进行示教时, 作为示教人员必须事先接受过专门的培训才行. 与示教作业人员一起进行作业的监护人员, 处在机器人可动范围外时,〔B,可进行共同作业。
并联机器人的雅可比,可操作性,条件数和精度

并联机器人的雅可比,可操作性,条件数和精度(翻译论文)虽然在最早的机器人研究中就已经有了雅可比矩阵的概念、可操纵性、条件数的概念,但是它们的真正意义并不是很好理解。
在本文中,我们重新审视这些作为并联机器人优化设计精度指标的概念。
首先,我们指出,通常的雅可比矩阵的输入—输入方程可能不足以分析平台的定位误差。
然后我们检验可操纵性的概念,表明其经典的解释是错误的。
我们考虑各种常见的局部灵巧指数,其中大部分是基于雅可比矩阵的条件数。
值得注意的是,即使对于一个给定的机器人,在一个特定的姿态也会有各种各样的条件数,这些条件数之间都不一致,和我们想得到的精度指标也不一致。
然后考虑了全局调节指数。
除了存在基于错误的局部准确性指数的问题外,还有一个忽略了大部分时间而进行计算的计算问题。
最后,我们检验了其他哪些指标可用于优化设计,并且介绍了计算它们的难度。
1 引言我们将使用一个相对通用的非冗余并联机构的定义。
当一个机构用至少两个运动链来控制自由度n<6的末端执行器时,我们定义它为并联机构,而其他的6-n 个自由度是一个恒定值通过单自由度驱动关节控制。
此外,如果将驱动器锁定,则末端执行器的自由度为0,非驱动关节有一个单自由度。
这样的定义涵盖了经典的六自由度机器人,比如Gough 和Hexa 平台,还有少于六自由度的机构,如Delta 和3-UPU 机构。
如今,并联机构的应用领域越来越广,如望远镜、精定位装置、包装速度快、机床、医疗。
对尺寸非常的敏感是并联机构优化设计的一个关键问题。
最优设计的方法有静力学性能指标。
精度显然是许多应用中的一个关键问题。
并联机构也有串联机构的一些关键问题,因此,针对这些问题做了很多广泛的研究,定义除了很多准确性指标,这些结果已经应用到并联机构上。
本文的目的是检验这些指标是否适用于并联机构。
雅可比矩阵和逆雅可比矩阵用于研究末端执行器的定位精度的,为了这个目的,很有必要研究它们的概念。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、平面二连杆机器人手臂运动学平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l ,连杆3长度为3l 。
建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 、33(,)x y 为连体坐标系,分别固结在连杆1、连杆2、连杆3上并随它们一起运动。
关节角顺时针为负逆时针为正。
1θ图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标:112123123112123123cos cos()+cos()sin sin()+sin()p p x l l l y l l l θθθθθθθθθθθθ=++++=++++(1)2、用D-H 方法建立运动学方程假定0z 、1z 、2z 垂直于纸面向外。
从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100010000cos sin 00sin cos 111101θθθθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=100010000cos sin 0sin cos 2212212θθθθl T (3) 从222(,,)x y z 到333(,,)x y z 的齐次旋转变换矩阵为:3323312cos sin 0sin cos 000010001l T θθθθ-⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦(3) 从),,(000z y x 到333(,,)x y z 的齐次旋转变换矩阵为:11221332112233001231231231231121cos sin 00cos sin 0cos sin 0sin cos 00sin cos 00sin cos 00001000100010000100010001cos()sin()0cos cos(l l T T T T l l θθθθθθθθθθθθθθθθθθθθ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⋅⋅=⋅⋅⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦++-+++=212312311212)sin()cos()0sin sin()00100001l l θθθθθθθθθθ+⎡⎤⎢⎥++++++⎢⎥⎢⎥⎢⎥⎣⎦(4)那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为:12312311212312312311212003311212312311212cos()sin()0cos cos()sin()cos()0sin sin()00010000011cos cos()cos()sin sin()l l l l l P T P l l l l l θθθθθθθθθθθθθθθθθθθθθθθθθθθ++-++++⎡⎤⎡⎤⎢⎥⎢⎥++++++⎢⎥⎢⎥=⋅=⋅⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦+++++++=3123sin()011p p p x l y z θθθ⎡⎤⎡⎤⎢⎥⎢⎥+++⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(5)即,112123123112123123cos cos()+cos()sin sin()+sin()p p x l l l y l l l θθθθθθθθθθθθ=++++=++++ (6)结论:(6)与用简单的平面几何关系建立运动学方程(1)相同。
补充:正解用于仿真,逆解用于控制建立以上运动学方程后,若已知个连杆的关节角123θθθ、、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。
3、平面二连杆机器人手臂逆运动学二、平面二连杆机器人手臂的速度雅可比矩阵速度雅可比矩阵的定义:从关节速度向末端操作速度的线性变换。
现已二连杆平面机器人为例推导速度雅可比矩阵。
112123123112123123cos cos()+cos()sin sin()+sin()p p x l l l y l l l θθθθθθθθθθθθ=++++=++++上面的运动学方程两边对时间求导,得到下面的速度表达式:111212123123123111212122123123sin sin()()sin()()cos cos()()cos()()p p dx l l l dt dy l l l dtθθθθθθθθθθθθθθθθθθθθθθθθ=-⋅-+⋅+-++⋅++=⋅++⋅++++⋅++&&&&&&&&&&&&(17)把上式写成如下的矩阵形式:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡++++-+--=⎥⎦⎤⎢⎣⎡212122121121221211)cos()cos(cos )sin()sin(sin θθθθθθθθθθθθ&&&&l l l l l l y x p p (18) 令上式中的末端位置速度矢量Xy x p p &&&=⎥⎦⎤⎢⎣⎡, 关节角速度矢量Θ=⎥⎦⎤⎢⎣⎡&&&21θθ, 矩阵),()cos()cos(cos )sin()sin(sin 212122121121221211θθθθθθθθθθθθJ l l l l l l =⎥⎦⎤⎢⎣⎡++++-+--),(21θθJ 就就是速度雅可比矩阵,实现从关节角速度向末端位置速度的转变。
(18)式可以写成:Θ⋅=&&),(21θθJ X 速度雅可比矩阵可以进一步写成:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡++++-+--=22211211212212112122121121)cos()cos(cos )sin()sin(sin ),(J J Jl l l l l l J J θθθθθθθθθθθθ (19)其中,)cos()cos(cos )sin()sin(sin 2122222121112121221221211111θθθθθθθθθθθθθθ+=∂∂=++=∂∂=+-=∂∂=+--=∂∂=l y J l l y J l x J l l x J p p p p (20)由此可知雅可比矩阵的定义:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂=⎥⎦⎤⎢⎣⎡=21212221121121),(θθθθθθp p p pJ y y x x J J J J (21) 三、平面二连杆机器人手臂的动力学方程推倒动力学方程的方法很多,各有优缺点。
拉格朗日方法思路清晰、不考虑连杆之间的内力,就是推倒动力学方程的常用方法。
下面推导图1所示的平面双连杆机器人的动力学方程。
图1中所示连杆均为均质杆,其转动惯量分别就是1I 与2I 。
1、求两连杆的拉格朗日函数 (1)求系统总动能连杆1的动能为:212112121121161)31(2121θθθ&&&l m l m I K A ===(21)求连杆2质心D 处的线速度:对连杆2质心位置求导得到其线速度。
连杆2质心位置为:)sin(21sin )cos(21cos 2121121211θθθθθθ++=++=l l y l l x D D (22)连杆2质心速度为:)()cos(21cos )()sin(21sin 2121211121212111θθθθθθθθθθθθ&&&&&&&&+⋅++⋅=+⋅+-⋅-=l l Y l l x D D (23)21221222222212212221222)cos 21(41)cos 41(θθθθθθ&&&&&&l l l l l l l l y x V D D D +++++=+= (24)连杆2的动能:21221222222222122122212212212222222122122212221222222212)cos 32(2161)cos 31(21])cos 21(41)cos 41[(21))(121(2121)(21θθθθθθθθθθθθθθθθ&&&&&&&&&&&&l l l m l m l l l l m l l l l l l l l m l m V m I K D D +++++=+++++++=++=(25) 系统总动能:212212222222222122122222112122122122222222212212221221)cos 2131(61)cos 21616121()cos 32(2161)cos 31(21θθθθθθθθθθθθ&&&&&&&&l l m l m l m l l m l m l m l m l l l m l m l l l l m K K K ++++++=+++++=+= (26) (2)求系统总势能 系统总势能为:))sin(21sin (sin 21212112111θθθθ+++=l l g m gl m P (27)(3)求拉格朗日函数)]sin(21sin [sin 21)cos 2131(61)cos 21616121(21211211121221222222222212212222211212θθθθθθθθθθ++--++++++=-=l l g m gl m l l m l m l m l l m l m l m l m PK L &&&& (28) (4)列写动力学方程按照拉格朗日方程,对应关节1、2的驱动力矩分别为:222111θθτθθτ∂∂-∂∂∂∂=∂∂-∂∂∂∂=L L t LL t && (29)22212222122122222112121)cos 2131()cos 3131(θθθθθ&&&l l m l m l l m l m l m l m L +++++=∂∂ 22221221221222212222122122222112121sin 21sin )cos 2131()cos 3131(θθθθθθθθθθ&&&&&&&&l l m l l m l l m l m l l m l m l m l m L t --+++++=∂∂∂∂)cos(21cos )21(212211211θθθθ+-+-=∂∂gl m gl m m L )cos(21cos )21(sin 21sin )cos 2131()cos 3131(2122112122221221221222212222122122222112121θθθθθθθθθθθθτ++++--+++++=gl m gl m m l l m l l m l l m l m l l m l m l m l m &&&&&&& (30)同理:1221222222222)cos 2131(31θθθθ&&&l l m l m l m L ++=∂∂ 2122122222122122222sin 2131)cos 2131(θθθθθθθ&&&&&&&l l m l m l l m l m L t -++=∂∂∂∂ )cos(21sin 21sin 2121222122122122122θθθθθθθθ+---=∂∂gl m l l m l l m L &&& )cos(21sin 2131)cos 2131(21222122122222122122222θθθθθθθτ+++++=gl m l l m l m l l m l m &&&&& (31)联合(30)、(31)式,将动力学方程写成如下矩阵形式:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++=⎥⎦⎤⎢⎣⎡)cos(21)cos(21cos )21(000sin 0sin 21sin 21031cos 2131cos 2131cos 3131212221221121212122122221221222122122222122222212222221222221121221θθθθθθθθθθθθθθθθθθθττgl m gl m gl m m l l m l l m l l m l m l l m l m l l m l m l l m l m l m l m &&&&&&&&&& (32)四、平面二连杆机器人手臂的轨迹规划轨迹规划就就是已知起点与终点的位置速度加速度等参数确定中间点的相应参数的过程。