第1章 习题答案
管理学_第一章__管理与管理者_习题答案
1. 管理自从有了人类集体活动以来就开始了。
ANS: T2. 管理就是对一个组织所拥有的物质资源和人力资源进行计划、组织、领导和控制,实现组织目标。
ANS: F3. 管理的基本活动对任何组织都有着普遍性,但盈利性组织比非盈利性组织更需要加强管理。
ANS: F4. 高层管理人员花在计划决策上的时间相对更多一些。
ANS: T5. 中级管理人员往往处理现场、指导操作等技术性工作较多。
ANS: F6. 组织中向外界发布信息的角色称为组织发言人。
ANS: T7. 计划工作之后自然就需要组织工作来发挥作用。
ANS: T8. 管理的有效性在于充分利用各种资源,以最少的消耗有效地实现组织目标。
ANS:T9. 基层第一线管理人员对操作者的活动进行日常监督管理。
ANS: T10. 部门经理属于高层管理人员。
ANS: F11. 管理人员的沟通联络活动属于决策方面角色的职能。
ANS: F12. 技术技能是指沟通、领导、激励下属的能力。
ANS: F13. 技术技能对管理人员非常重要,因为它能使管理人员通过分析确定问题的所在,得出解决的办法。
ANS: F14. 领导工作涉及为各项职务配备合适人选,并通过激励调动组织成员的积极性。
ANS: F15. 为达到共同目标而一起工作的群体是组织。
ANS: T16. 对人力、财力、物力、信息资源进行计划、组织、领导、控制活动的主体为管理人员。
ANS: T17. 负责组织成员的挑选、培训、使用、解雇等工作的管理人员是人事管理人员。
ANS:T18. 对基层第一线管理人员最重要的管理技能是技术技能。
ANS: T19. 制定战略目标是基层管理人员的工作。
ANS: F20. 管理的四项基本活动是计划、人事、经营、控制。
ANS: F21. 管理概念在不同国家间具有可转移性。
ANS: F22. 管理的首要职能是控制。
ANS: F23. 管理者是指挥别人活动的人。
ANS: T24. 操作者不仅直接从事某项工作或任务,而且具有监督其他人工作的职责。
第一章习题答案
第⼀章习题答案第⼀章思考题答案1.基于总线结构的计算机系统通常由哪5个部分构成?并简述各部分的主要作⽤。
解答:1.中央处理器CPU(central processor unit)或称微处理器(microprocessor unit)中央处理器具有算术运算、逻辑运算和控制操作的功能,是计算机的核⼼。
2.总线总线是把计算机各个部分有机地连接起来的导线,是各个部分之间进⾏信息交换的公共通道。
3.存储器(memory)存储器的功能是存储程序、数据和各种信号、命令等信息,并在需要时提供这些信息。
4.输⼊输出(I/O)接⼝外部设备与CPU之间通过输⼊输出接⼝连接。
5.输⼊输出(I/O)设备输⼊设备是变换输⼊信息形式的部件。
它将⼈们熟悉的信息形式变换成计算机能接收并识别的信息形式。
输出设备是变换计算机的输出信息形式的部件。
它将计算机处理结果的⼆进制信息转换成⼈们或其他设备能接收和识别的形式,如字符、⽂字、图形等。
2.试举例说明计算机进⾏加法运算的⼯作过程。
解答:⽰例如下:inta,b,c;c=a+b;⼯作过程简述:a,b,c都为内存中的数据,CPU⾸先需要从内存中分别将a,b的值读⼊寄存器中,然后再执⾏加法运算指令,加法运算的结果暂存在寄存器中,因此还需要执⾏数据存储指令,将运算结果保存到内存中,因此像上例中的C语⾔语句,实际上需要经过两条数据读取指令,⼀条加法运算指令,⼀条数据存储指令才能完成。
3.“冯·诺依曼型结构”计算机与哈佛结构计算机的差别是什么?各有什么优缺点?解答:冯·诺依曼结构计算机具有以下⼏个特点:①有⼀个存储器;②有⼀个控制器;③有⼀个运算器,⽤于完成算术运算和逻辑运算;④有输⼊和输出设备,⽤于进⾏⼈机通信;⑤处理器使⽤同⼀个存储器存储指令和数据,经由同⼀个总线传输。
哈佛结构计算机:①使⽤两个独⽴的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存;②具有⼀条独⽴的地址总线和⼀条独⽴的数据总线,利⽤公⽤地址总线访问两个存储模块(程序存储模块和数据存储模块),公⽤数据总线则被⽤来完成程序存储模块或数据存储模块与CPU 之间的数据传输;③两条总线由程序存储器和数据存储器分时共⽤。
第一章 习题答案
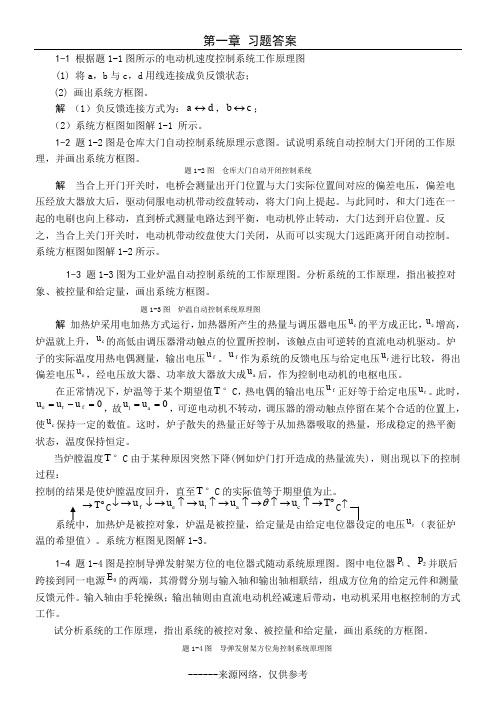
第一章 习题答案1-1 根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:d a ↔,c b ↔;(2)系统方框图如图解1-1 所示。
1-2 题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电解 c u 增高,偏差电压 r 。
此时,-=r e u u 使c u 过程:系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。
系统方框图见图解1-3。
1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器1P 、2P 并联后跨接到同一电源0E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
题1-4图 导弹发射架方位角控制系统原理图解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器1P 的滑臂转过一个输入角i θ的瞬间,由于输出轴的转角i o θθ≠,于是出现一个误差角o i e θθθ-=,该误差角通过电位器1P 、2P 转换成偏差电压o i e u u u -=,e u 经放大后驱动电动机转动,在驱动导弹发射架转动的同时,通过输出轴带动电位器2P 的滑臂转过一定的角度o θ,直至i o θθ=时,o i u u =,偏差电压0=e u ,电动机停止转动。
这时,导弹发射架停留在相应的方位角上。
只要o i θθ≠,偏差就会产生调节作用,控制的结果是消除偏差e θ,使输出量o θ严格地跟随输入量i θ的变化而变化。
《统计学原理》课后习题答案

第一章练习题参考答案一.单项选择题1.B;2.A;3.B;4.C;5.D;6.A;7.C;8.C;9.C;10.A;11.C;12.C。
二.多项选择题1.ABDE;2.ACD;3.BCD;4.ACD;5.ACDE;6.ACE;7.AD;8.ABC;9.ACD;10.AD;11.BCDE;12.ABCDE;13.AC。
三.判断题1.×;2.×;3.×;4.×;5.√;6.×;7.×;8.√;9.×;10.√。
第二章练习题参考答案一.单项选择题1.C;2.C;3.D;4.B;5.D;6.D;7.B;8.D;9.B;10.B;11.A;12.C;13.D。
二.多项选择题1.CE;2.ACE;3.CE;4.BCD;5.ABCE;6.BC;7.BCD;8.ABD;9.ABD;10.ACDE;11.ABCE;12.ABE。
三.判断题1.×;2.√;3.×;4.×;5.×;6.×;7.√;8.×;9.×;10.×。
第三章练习题参考答案一.单项选择题1.B;2.C;3.C;4.C;5.D;6.B;7.B;8.B;9.D;10.B;11.A;12.B;13.D;14.A。
二.多项选择题1.AB;2.AC;3.AB;4.ABC;5.AB;6.ABD;7.ABC;8.ACE;9.BD;10.ABDE。
三.判断题1.√;2.×;3.×;4.×;5.√;6.×;7.√;8.√;9.×;10.×。
四.计算分析题1.解:(1)按职称编制的分配数列2.解:编制单项式变量数列3.解:(1)编制组距式变量数列。
(2直方图(略)第四章练习题参考答案一.单项选择题1.C;2.D;3.B;4.D;5.C;6.A;7.C;8.C;9.B;10.C;11.B;12.D;13.A;14.D;15.16.B;17.B;18.D;19.C;20.C;21.D;22.B;23.C;24.C;25.B。
电路理论习题解答 第一章
1.5
u /V
内阻不为零
+ us
R0
I
+
u
RL
−
伏安关系曲线
−
I/A 0.15
0
1.5
u /V
注:这里的伏安关系曲线只能在第一象限,原因也是,一旦出了第一象限, u 和 I 的比值就 变为负的了,反推出的 RL 就变为负值了,与题意不符。
V
V
1.5V
1.5V
R 内阻为零时 内阻不为零时
R
1-9 附图是两种受控源和电阻 RL 组成的电路。现以 RL 上电压作为输出信号,1)求两电路的电 压增益(A,gmRL);2)试以受控源的性质,扼要地说明计算得到的结果。
1) 如果不用并联分压(在中学就掌握的东西),当然也可以用两个回路的 KVL 方程和顶部 节点的 KCL 方程,得出上面的 H(jω)的表达式,但是显然这样做是低效的。 2) 事实上,本课程的目的是希望学习者能够根据不同的题目,尽可能采用多种方法中的一 种最简单的方法去解决问题。因此, a) 只要没有要求,任意的逻辑完整的解题思路都是可取的; b) 学习者可以视自己的练习目的选择一种简单熟悉的方法、或者一种较为系统的方法、 或者多种方法来完成习题。
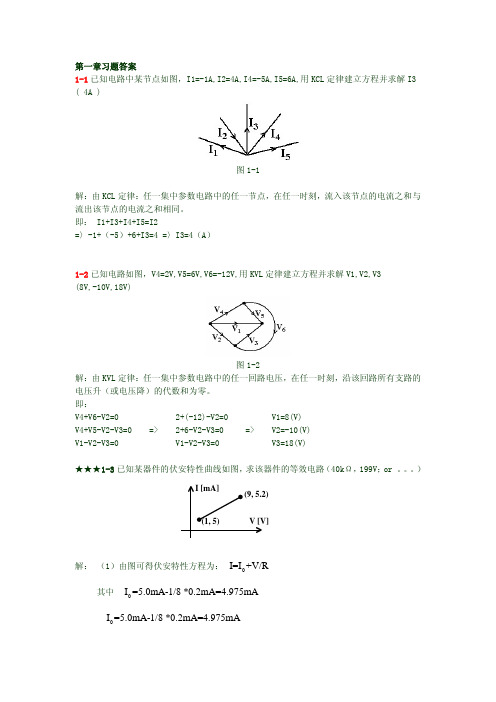
第一章习题答案 1-1 已知电路中某节点如图,I1=-1A,I2=4A,I4=-5A,I5=6A,用 KCL 定律建立方程并求解 I3 ( 4A )
图 1-1 解:由 KCL 定律:任一集中参数电路中的任一节点,在任一时刻,流入该节点的电流之和与 流出该节点的电流之和相同。 即: I1+I3+I4+I5=I2 =〉-1+(-5)+6+I3=4 =〉I3=4(A)
1 2
机械制造技术基础第一章课后习题答案

机械制造技术基础第一章课后习题答案《机械制造技术基础》部分习题参考解答第一章绪论1-1 什么是生产过程、工艺过程和工艺规程?答:生产过程——从原材料(或半成品)进厂,一直到把成品制造出来的各有关劳动过程的总称为该工厂的过程。
工艺过程——在生产过程中,凡属直接改变生产对象的尺寸、形状、物理化学性能以及相对位置关系的过程。
工艺规程——记录在给定条件下最合理的工艺过程的相关内容、并用来指导生产的文件。
1-2 什么是工序、工位、工步和走刀?试举例说明。
答:工序——一个工人或一组工人,在一个工作地对同一工件或同时对几个工件所连续完成的那一部分工艺过程。
工位——在工件的一次安装中,工件相对于机床(或刀具)每占据一个确切位置中所完成的那一部分工艺过程。
工步——在加工表面、切削刀具和切削用量(仅指机床主轴转速和进给量)都不变的情况下所完成的那一部分工艺过程。
走刀——在一个工步中,如果要切掉的金属层很厚,可分几次切,每切削一次,就称为一次走刀。
比如车削一阶梯轴,在车床上完成的车外圆、端面等为一个工序,其中,n, f, a p 不变的为一工步,切削小直径外圆表面因余量较大要分为几次走刀。
1-3 什么是安装?什么是装夹?它们有什么区别?答:安装——工件经一次装夹后所完成的那一部分工艺过程。
装夹——特指工件在机床夹具上的定位和夹紧的过程。
安装包括一次装夹和装夹之后所完成的切削加工的工艺过程;装夹仅指定位和夹紧。
1-4 单件生产、成批生产、大量生产各有哪些工艺特征?答:单件生产零件互换性较差、毛坯制造精度低、加工余量大;采用通用机床、通用夹具和刀具,找正装夹,对工人技术水平要求较高;生产效率低。
大量生产零件互换性好、毛坯精度高、加工余量小;采用高效专用机床、专用夹具和刀具,夹具定位装夹,操作工人技术水平要求不高,生产效率高。
成批生产的毛坯精度、互换性、所以夹具和刀具等介于上述两者之间,机床采用通用机床或者数控机床,生产效率介于两者之间。
大学物理习题答案解析第一章

第一章 质点运动学1 -1 质点作曲线运动,在时刻t 质点的位矢为r ,速度为v ,速率为v ,t 至(t +Δt )时间内的位移为Δr , 路程为Δs , 位矢大小的变化量为Δr ( 或称Δ|r |),平均速度为v ,平均速率为v .(1) 根据上述情况,则必有( ) (A) |Δr |= Δs = Δr(B) |Δr |≠ Δs ≠ Δr ,当Δt →0 时有|d r |= d s ≠ d r (C) |Δr |≠ Δr ≠ Δs ,当Δt →0 时有|d r |= d r ≠ d s (D) |Δr |≠ Δs ≠ Δr ,当Δt →0 时有|d r |= d r = d s (2) 根据上述情况,则必有( )(A) |v |= v ,|v |= v (B) |v |≠v ,|v |≠ v (C) |v |= v ,|v |≠ v (D) |v |≠v ,|v |= v分析与解 (1) 质点在t 至(t +Δt )时间内沿曲线从P 点运动到P′点,各量关系如图所示, 其中路程Δs =PP′, 位移大小|Δr |=PP ′,而Δr =|r |-|r |表示质点位矢大小的变化量,三个量的物理含义不同,在曲线运动中大小也不相等(注:在直线运动中有相等的可能).但当Δt →0 时,点P ′无限趋近P 点,则有|d r |=d s ,但却不等于d r .故选(B).(2) 由于|Δr |≠Δs ,故tst ΔΔΔΔ≠r ,即|v |≠v . 但由于|d r |=d s ,故tst d d d d =r ,即|v |=v .由此可见,应选(C). 1 -2 一运动质点在某瞬时位于位矢r (x,y )的端点处,对其速度的大小有四种意见,即(1)t r d d ; (2)t d d r ; (3)t s d d ; (4)22d d d d ⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛t y t x .下述判断正确的是( )(A) 只有(1)(2)正确 (B) 只有(2)正确 (C) 只有(2)(3)正确 (D) 只有(3)(4)正确分析与解trd d 表示质点到坐标原点的距离随时间的变化率,在极坐标系中叫径向速率.通常用符号v r 表示,这是速度矢量在位矢方向上的一个分量;td d r表示速度矢量;在自然坐标系中速度大小可用公式t s d d =v 计算,在直角坐标系中则可由公式22d d d d ⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛=t y t x v 求解.故选(D).1 -3 质点作曲线运动,r 表示位置矢量, v 表示速度,a 表示加速度,s 表示路程, a t表示切向加速度.对下列表达式,即(1)d v /d t =a ;(2)d r /d t =v ;(3)d s /d t =v ;(4)d v /d t |=a t. 下述判断正确的是( )(A) 只有(1)、(4)是对的 (B) 只有(2)、(4)是对的 (C) 只有(2)是对的 (D) 只有(3)是对的分析与解td d v表示切向加速度a t,它表示速度大小随时间的变化率,是加速度矢量沿速度方向的一个分量,起改变速度大小的作用;t r d d 在极坐标系中表示径向速率v r (如题1 -2 所述);tsd d 在自然坐标系中表示质点的速率v ;而td d v表示加速度的大小而不是切向加速度a t.因此只有(3) 式表达是正确的.故选(D).1 -4 一个质点在做圆周运动时,则有( ) (A) 切向加速度一定改变,法向加速度也改变 (B) 切向加速度可能不变,法向加速度一定改变 (C) 切向加速度可能不变,法向加速度不变 (D) 切向加速度一定改变,法向加速度不变分析与解 加速度的切向分量a t起改变速度大小的作用,而法向分量a n 起改变速度方向的作用.质点作圆周运动时,由于速度方向不断改变,相应法向加速度的方向也在不断改变,因而法向加速度是一定改变的.至于a t是否改变,则要视质点的速率情况而定.质点作匀速率圆周运动时, a t恒为零;质点作匀变速率圆周运动时, a t为一不为零的恒量,当a t改变时,质点则作一般的变速率圆周运动.由此可见,应选(B).*1 -5 如图所示,湖中有一小船,有人用绳绕过岸上一定高度处的定滑轮拉湖中的船向岸边运动.设该人以匀速率v 0 收绳,绳不伸长且湖水静止,小船的速率为v ,则小船作( )(A) 匀加速运动,θcos 0v v =(B) 匀减速运动,θcos 0v v = (C) 变加速运动,θcos 0v v =(D) 变减速运动,θcos 0v v = (E) 匀速直线运动,0v v =分析与解 本题关键是先求得小船速度表达式,进而判断运动性质.为此建立如图所示坐标系,设定滑轮距水面高度为h,t 时刻定滑轮距小船的绳长为l ,则小船的运动方程为22h l x -=,其中绳长l随时间t 而变化.小船速度22d d d d h l t llt x -==v ,式中t l d d 表示绳长l 随时间的变化率,其大小即为v 0,代入整理后为θlh l cos /0220v v v =-=,方向沿x 轴负向.由速度表达式,可判断小船作变加速运动.故选(C).讨论 有人会将绳子速率v 0按x 、y 两个方向分解,则小船速度θcos 0v v =,这样做对吗? 1 -6 已知质点沿x 轴作直线运动,其运动方程为32262t t x -+=,式中x 的单位为m,t 的单位为 s .求:(1) 质点在运动开始后4.0 s 内的位移的大小; (2) 质点在该时间内所通过的路程;(3) t =4 s 时质点的速度和加速度.分析 位移和路程是两个完全不同的概念.只有当质点作直线运动且运动方向不改变时,位移的大小才会与路程相等.质点在t 时间内的位移Δx 的大小可直接由运动方程得到:0Δx x x t -=,而在求路程时,就必须注意到质点在运动过程中可能改变运动方向,此时,位移的大小和路程就不同了.为此,需根据0d d =tx来确定其运动方向改变的时刻t p ,求出0~t p 和t p ~t 内的位移大小Δx 1 、Δx 2 ,则t 时间内的路程21x x s ∆+∆=,如图所示,至于t =4.0 s 时质点速度和加速度可用tx d d 和22d d t x两式计算.解 (1) 质点在4.0 s 内位移的大小m 32Δ04-=-=x x x(2) 由 0d d =tx得知质点的换向时刻为s 2=p t (t =0不合题意)则m 0.8Δ021=-=x x xm 40Δ242-=-=x x x所以,质点在4.0 s 时间间隔内的路程为m 48ΔΔ21=+=x x s(3) t =4.0 s 时1s0.4s m 48d d -=⋅-==t t xv2s0.422m.s 36d d -=-==t t x a1 -7 一质点沿x 轴方向作直线运动,其速度与时间的关系如图(a)所示.设t =0 时,x =0.试根据已知的v -t 图,画出a -t 图以及x -t 图.分析 根据加速度的定义可知,在直线运动中v -t 曲线的斜率为加速度的大小(图中AB 、CD 段斜率为定值,即匀变速直线运动;而线段BC 的斜率为0,加速度为零,即匀速直线运动).加速度为恒量,在a -t 图上是平行于t 轴的直线,由v -t 图中求出各段的斜率,即可作出a -t 图线.又由速度的定义可知,x -t 曲线的斜率为速度的大小.因此,匀速直线运动所对应的x -t 图应是一直线,而匀变速直线运动所对应的x –t 图为t 的二次曲线.根据各段时间内的运动方程x =x (t ),求出不同时刻t 的位置x ,采用描数据点的方法,可作出x -t 图.解 将曲线分为AB 、BC 、CD 三个过程,它们对应的加速度值分别为2s m 20-⋅=--=AB AB AB t t a v v (匀加速直线运动)0=BC a (匀速直线运动)2s m 10-⋅-=--=CD CD CD t t a v v (匀减速直线运动)根据上述结果即可作出质点的a -t 图[图(B)].在匀变速直线运动中,有2021t t x x ++=v由此,可计算在0~2s和4~6s时间间隔内各时刻的位置分别为用描数据点的作图方法,由表中数据可作0~2s和4~6s时间内的x -t 图.在2~4s时间内, 质点是作1s m 20-⋅=v 的匀速直线运动, 其x -t 图是斜率k =20的一段直线[图(c)].1 -8 已知质点的运动方程为j i r )2(22t t -+=,式中r 的单位为m,t 的单位为s.求: (1) 质点的运动轨迹;(2) t =0 及t =2s时,质点的位矢;(3) 由t =0 到t =2s内质点的位移Δr 和径向增量Δr ;*(4) 2 s 内质点所走过的路程s .分析 质点的轨迹方程为y =f (x ),可由运动方程的两个分量式x (t )和y (t )中消去t 即可得到.对于r 、Δr 、Δr 、Δs 来说,物理含义不同,可根据其定义计算.其中对s 的求解用到积分方法,先在轨迹上任取一段微元d s ,则22)d ()d (d y x s +=,最后用⎰=s s d 积分求s.解 (1) 由x (t )和y (t )中消去t 后得质点轨迹方程为2412x y -= 这是一个抛物线方程,轨迹如图(a)所示.(2) 将t =0s和t =2s分别代入运动方程,可得相应位矢分别为j r 20= , j i r 242-=图(a)中的P 、Q 两点,即为t =0s和t =2s时质点所在位置. (3) 由位移表达式,得j i j i r r r 24)()(Δ020212-=-+-=-=y y x x其中位移大小m 66.5)(Δ)(ΔΔ22=+=y x r而径向增量m 47.2ΔΔ2020222202=+-+=-==y x y x r r r r*(4) 如图(B)所示,所求Δs 即为图中PQ 段长度,先在其间任意处取AB 微元d s ,则22)d ()d (d y x s +=,由轨道方程可得x x y d 21d -=,代入d s ,则2s内路程为m 91.5d 4d 42=+==⎰⎰x x s s Q P1 -9 质点的运动方程为23010t t x +-= 22015t t y -=式中x ,y 的单位为m,t 的单位为s.试求:(1) 初速度的大小和方向;(2) 加速度的大小和方向.分析 由运动方程的分量式可分别求出速度、加速度的分量,再由运动合成算出速度和加速度的大小和方向.解 (1) 速度的分量式为t t xx 6010d d +-==v t ty y 4015d d -==v当t =0 时, v o x =-10 m·s-1 , v o y =15 m·s-1 ,则初速度大小为120200s m 0.18-⋅=+=y x v v v设v o 与x 轴的夹角为α,则23tan 00-==xy αv vα=123°41′(2) 加速度的分量式为2s m 60d d -⋅==ta xx v , 2s m 40d d -⋅-==t a y y v则加速度的大小为222s m 1.72-⋅=+=y x a a a设a 与x 轴的夹角为β,则32tan -==x ya a β β=-33°41′(或326°19′)1 -10 一升降机以加速度1.22 m·s-2上升,当上升速度为2.44 m·s-1时,有一螺丝自升降机的天花板上松脱,天花板与升降机的底面相距2.74 m .计算:(1)螺丝从天花板落到底面所需要的时间;(2)螺丝相对升降机外固定柱子的下降距离.分析 在升降机与螺丝之间有相对运动的情况下,一种处理方法是取地面为参考系,分别讨论升降机竖直向上的匀加速度运动和初速不为零的螺丝的自由落体运动,列出这两种运动在同一坐标系中的运动方程y 1 =y 1(t )和y 2 =y 2(t ),并考虑它们相遇,即位矢相同这一条件,问题即可解;另一种方法是取升降机(或螺丝)为参考系,这时,螺丝(或升降机)相对它作匀加速运动,但是,此加速度应该是相对加速度.升降机厢的高度就是螺丝(或升降机)运动的路程.解1 (1) 以地面为参考系,取如图所示的坐标系,升降机与螺丝的运动方程分别为20121at t y +=v20221gt t h y -+=v当螺丝落至底面时,有y 1 =y 2 ,即20202121gt t h at t -+=+v vs 705.02=+=ag ht (2) 螺丝相对升降机外固定柱子下降的距离为m 716.021202=+-=-=gt t y h d v解2 (1)以升降机为参考系,此时,螺丝相对它的加速度大小a ′=g +a ,螺丝落至底面时,有2)(210t a g h +-=s 705.02=+=ag ht (2) 由于升降机在t 时间内上升的高度为2021at t h +='v则 m 716.0='-=h h d1 -11 一质点P 沿半径R =3.0 m 的圆周作匀速率运动,运动一周所需时间为20.0s,设t =0 时,质点位于O 点.按(a )图中所示Oxy 坐标系,求(1) 质点P 在任意时刻的位矢;(2)5s时的速度和加速度.分析 该题属于运动学的第一类问题,即已知运动方程r =r (t )求质点运动的一切信息(如位置矢量、位移、速度、加速度).在确定运动方程时,若取以点(0,3)为原点的O′x′y′坐标系,并采用参数方程x′=x′(t )和y′=y′(t )来表示圆周运动是比较方便的.然后,运用坐标变换x =x 0 +x ′和y =y 0 +y ′,将所得参数方程转换至Oxy 坐标系中,即得Oxy 坐标系中质点P 在任意时刻的位矢.采用对运动方程求导的方法可得速度和加速度.解 (1) 如图(B)所示,在O′x′y′坐标系中,因t Tθπ2=,则质点P 的参数方程为t T R x π2sin=', t T R y π2cos -='坐标变换后,在O x y 坐标系中有t TR x x π2sin='=, R t TR y y y +-=+'=π2cos0 则质点P 的位矢方程为j i r ⎪⎭⎫ ⎝⎛+-+=R t T R t T R π2cos π2sinj i )]π1.0(cos 1[3)π1.0(sin 3t t -+=(2) 5s时的速度和加速度分别为j j i r )s m π3.0(π2sin π2π2cos π2d d 1-⋅=+==t TT R t T T R t vi j i r a )s m π03.0(π2cos )π2(π2sin )π2(d d 222222-⋅-=+-==t TT R t T T R t 1 -12 地面上垂直竖立一高20.0 m 的旗杆,已知正午时分太阳在旗杆的正上方,求在下午2∶00 时,杆顶在地面上的影子的速度的大小.在何时刻杆影伸展至20.0 m ?分析 为求杆顶在地面上影子速度的大小,必须建立影长与时间的函数关系,即影子端点的位矢方程.根据几何关系,影长可通过太阳光线对地转动的角速度求得.由于运动的相对性,太阳光线对地转动的角速度也就是地球自转的角速度.这样,影子端点的位矢方程和速度均可求得.解 设太阳光线对地转动的角速度为ω,从正午时分开始计时,则杆的影长为s =h tg ωt ,下午2∶00 时,杆顶在地面上影子的速度大小为132s m 1094.1cos d d --⋅⨯===tωωh t s v 当杆长等于影长时,即s =h ,则s 606034πarctan 1⨯⨯===ωh s ωt 即为下午3∶00 时.1 -13 质点沿直线运动,加速度a =4 -t2 ,式中a 的单位为m·s-2 ,t 的单位为s.如果当t =3s时,x =9 m,v =2 m·s-1 ,求质点的运动方程.分析 本题属于运动学第二类问题,即已知加速度求速度和运动方程,必须在给定条件下用积分方法解决.由t a d d v =和tx d d =v 可得t a d d =v 和t x d d v =.如a =a (t )或v =v (t ),则可两边直接积分.如果a 或v 不是时间t 的显函数,则应经过诸如分离变量或变量代换等数学操作后再做积分.解 由分析知,应有⎰⎰=tt a 0d d 0vv v得 03314v v +-=t t (1)由⎰⎰=txx t x 0d d 0v得 00421212x t t t x ++-=v (2) 将t =3s时,x =9 m,v =2 m·s-1代入(1) (2)得v 0=-1 m·s-1,x 0=0.75 m .于是可得质点运动方程为75.0121242+-=t t x 1 -14 一石子从空中由静止下落,由于空气阻力,石子并非作自由落体运动,现测得其加速度a =A -B v ,式中A 、B 为正恒量,求石子下落的速度和运动方程.分析 本题亦属于运动学第二类问题,与上题不同之处在于加速度是速度v 的函数,因此,需将式d v =a (v )d t 分离变量为t a d )(d =v v后再两边积分. 解 选取石子下落方向为y 轴正向,下落起点为坐标原点.(1) 由题意知 v vB A ta -==d d (1) 用分离变量法把式(1)改写为t B A d d =-vv(2)将式(2)两边积分并考虑初始条件,有⎰⎰=-t t B A 0d d d 0v vvvv得石子速度 )1(Bt e BA--=v 由此可知当,t →∞时,BA→v 为一常量,通常称为极限速度或收尾速度. (2) 再由)1(d d Bt e BAt y --==v 并考虑初始条件有 t e BA y t Bt y d )1(d 00⎰⎰--= 得石子运动方程)1(2-+=-Bt e BAt B A y 1 -15 一质点具有恒定加速度a =6i +4j ,式中a 的单位为m·s-2 .在t =0时,其速度为零,位置矢量r 0 =10 m i .求:(1) 在任意时刻的速度和位置矢量;(2) 质点在Oxy 平面上的轨迹方程,并画出轨迹的示意图.分析 与上两题不同处在于质点作平面曲线运动,根据叠加原理,求解时需根据加速度的两个分量a x 和a y 分别积分,从而得到运动方程r 的两个分量式x (t )和y (t ).由于本题中质点加速度为恒矢量,故两次积分后所得运动方程为固定形式,即20021t a t x x x x ++=v 和20021t a t y y y y ++=v ,两个分运动均为匀变速直线运动.读者不妨自己验证一下.解 由加速度定义式,根据初始条件t 0 =0时v 0 =0,积分可得⎰⎰⎰+==ttt t 0)d 46(d d j i a vvj i t t 46+=v又由td d r=v 及初始条件t =0 时,r 0=(10 m)i ,积分可得 ⎰⎰⎰+==tt r r t t t t 0)d 46(d d 0j i r vj i r 222)310(t t ++=由上述结果可得质点运动方程的分量式,即x =10+3t 2y =2t 2消去参数t ,可得运动的轨迹方程3y =2x -20 m 这是一个直线方程.直线斜率32tan d d ===αx y k ,α=33°41′.轨迹如图所示. 1 -16 一质点在半径为R 的圆周上以恒定的速率运动,质点由位置A 运动到位置B,OA 和OB 所对的圆心角为Δθ.(1) 试证位置A 和B 之间的平均加速度为)Δ(/)Δcos 1(22θR θa v -=;(2) 当Δθ分别等于90°、30°、10°和1°时,平均加速度各为多少? 并对结果加以讨论.分析 瞬时加速度和平均加速度的物理含义不同,它们分别表示为t d d v =a 和tΔΔv =a .在匀速率圆周运动中,它们的大小分别为Ra n 2v =,t a ΔΔv = ,式中|Δv |可由图(B)中的几何关系得到,而Δt 可由转过的角度Δθ 求出.由计算结果能清楚地看到两者之间的关系,即瞬时加速度是平均加速度在Δt →0 时的极限值. 解 (1) 由图(b)可看到Δv =v 2 -v 1 ,故θΔcos 2Δ212221v v v v -+=v)Δcos 1(2θ-=v而vv θR s t ΔΔΔ==所以θR θt a Δ)cos Δ1(2ΔΔ2v -==v (2) 将Δθ=90°,30°,10°,1°分别代入上式,得R a 219003.0v ≈,Ra 229886.0v ≈ R a 239987.0v ≈,Ra 24000.1v ≈ 以上结果表明,当Δθ→0 时,匀速率圆周运动的平均加速度趋近于一极限值,该值即为法向加速度R2v . 1 -17 质点在Oxy 平面内运动,其运动方程为r =2.0t i +(19.0 -2.0t 2 )j ,式中r 的单位为m,t 的单位为s .求:(1)质点的轨迹方程;(2) 在t 1=1.0s 到t 2 =2.0s 时间内的平均速度;(3) t 1 =1.0s时的速度及切向和法向加速度;(4) t =1.0s 时质点所在处轨道的曲率半径ρ.分析 根据运动方程可直接写出其分量式x =x (t )和y =y (t ),从中消去参数t ,即得质点的轨迹方程.平均速度是反映质点在一段时间内位置的变化率,即t ΔΔr =v ,它与时间间隔Δt 的大小有关,当Δt →0 时,平均速度的极限即瞬时速度td d r =v .切向和法向加速度是指在自然坐标下的分矢量a t 和a n ,前者只反映质点在切线方向速度大小的变化率,即t t te a d d v =,后者只反映质点速度方向的变化,它可由总加速度a 和a t 得到.在求得t 1 时刻质点的速度和法向加速度的大小后,可由公式ρa n 2v =求ρ.解 (1) 由参数方程x =2.0t , y =19.0-2.0t 2消去t 得质点的轨迹方程:y =19.0 -0.50x 2(2) 在t 1 =1.00s 到t 2 =2.0s时间内的平均速度j i r r 0.60.2ΔΔ1212-=--==t t t r v (3) 质点在任意时刻的速度和加速度分别为j i j i j i t ty t x t y x 0.40.2d d d d )(-=+=+=v v v j j i a 222220.4d d d d )(-⋅-=+=s m ty t x t 则t 1 =1.00s时的速度v (t )|t =1s=2.0i -4.0j切向和法向加速度分别为t t y x t t t tt e e e a 222s 1s m 58.3)(d d d d -=⋅=+==v v v n n t n a a e e a 222s m 79.1-⋅=-=(4) t =1.0s质点的速度大小为122s m 47.4-⋅=+=y x v v v 则m 17.112==na ρv 1 -18 飞机以100 m·s-1 的速度沿水平直线飞行,在离地面高为100 m 时,驾驶员要把物品空投到前方某一地面目标处,问:(1) 此时目标在飞机正下方位置的前面多远? (2) 投放物品时,驾驶员看目标的视线和水平线成何角度?(3) 物品投出2.0s后,它的法向加速度和切向加速度各为多少?分析 物品空投后作平抛运动.忽略空气阻力的条件下,由运动独立性原理知,物品在空中沿水平方向作匀速直线运动,在竖直方向作自由落体运动.到达地面目标时,两方向上运动时间是相同的.因此,分别列出其运动方程,运用时间相等的条件,即可求解.此外,平抛物体在运动过程中只存在竖直向下的重力加速度.为求特定时刻t 时物体的切向加速度和法向加速度,只需求出该时刻它们与重力加速度之间的夹角α或β.由图可知,在特定时刻t ,物体的切向加速度和水平线之间的夹角α,可由此时刻的两速度分量v x 、v y 求出,这样,也就可将重力加速度g 的切向和法向分量求得.解 (1) 取如图所示的坐标,物品下落时在水平和竖直方向的运动方程分别为x =v t , y =1/2 gt 2飞机水平飞行速度v =100 m·s -1 ,飞机离地面的高度y =100 m,由上述两式可得目标在飞机正下方前的距离m 4522==gy x v(2) 视线和水平线的夹角为 o 5.12arctan==x y θ (3) 在任意时刻物品的速度与水平轴的夹角为vv v gt αx yarctan arctan == 取自然坐标,物品在抛出2s 时,重力加速度的切向分量与法向分量分别为2s m 88.1arctan sin sin -⋅=⎪⎭⎫ ⎝⎛==v gt g αg a t 2s m 62.9arctan cos cos -⋅=⎪⎭⎫ ⎝⎛==v gt g αg a n 1 -19 如图(a)所示,一小型迫击炮架设在一斜坡的底端O 处,已知斜坡倾角为α,炮身与斜坡的夹角为β,炮弹的出口速度为v 0,忽略空气阻力.求:(1)炮弹落地点P 与点O 的距离OP ;(2) 欲使炮弹能垂直击中坡面.证明α和β必须满足αβtan 21tan =并与v 0 无关. 分析 这是一个斜上抛运动,看似简单,但针对题目所问,如不能灵活运用叠加原理,建立一个恰当的坐标系,将运动分解的话,求解起来并不容易.现建立如图(a)所示坐标系,则炮弹在x 和y 两个方向的分运动均为匀减速直线运动,其初速度分别为v 0cos β和v 0sin β,其加速度分别为g sin α和gcos α.在此坐标系中炮弹落地时,应有y =0,则x =OP .如欲使炮弹垂直击中坡面,则应满足v x =0,直接列出有关运动方程和速度方程,即可求解.由于本题中加速度g 为恒矢量.故第一问也可由运动方程的矢量式计算,即20g 21t t +=v r ,做出炮弹落地时的矢量图[如图(B)所示],由图中所示几何关系也可求得OP (即图中的r 矢量).(1)解1 由分析知,炮弹在图(a)所示坐标系中两个分运动方程为αgt βt x sin 21cos 20-=v (1) αgt βt y cos 21sin 20-=v (2) 令y =0 求得时间t 后再代入式(1)得)cos(cos sin 2)sin sin cos (cos cos sin 2220220βααg ββαβααg βx OP +=-==v v 解2 做出炮弹的运动矢量图,如图(b)所示,并利用正弦定理,有βgt αt βαsin 212πsin 2πsin 20=⎪⎭⎫ ⎝⎛+=⎪⎭⎫ ⎝⎛--v r 从中消去t 后也可得到同样结果.(2) 由分析知,如炮弹垂直击中坡面应满足y =0 和v x =0,则0sin cos 0=-=αgt βx v v (3)由(2)(3)两式消去t 后得αβsin 21tan = 由此可知.只要角α和β满足上式,炮弹就能垂直击中坡面,而与v 0 的大小无关.讨论 如将炮弹的运动按水平和竖直两个方向分解,求解本题将会比较困难,有兴趣读者不妨自己体验一下.1 -20 一直立的雨伞,张开后其边缘圆周的半径为R ,离地面的高度为h ,(1) 当伞绕伞柄以匀角速ω旋转时,求证水滴沿边缘飞出后落在地面上半径为g ωh R r /212+=的圆周上;(2) 读者能否由此定性构想一种草坪上或农田灌溉用的旋转式洒水器的方案?分析 选定伞边缘O 处的雨滴为研究对象,当伞以角速度ω旋转时,雨滴将以速度v 沿切线方向飞出,并作平抛运动.建立如图(a)所示坐标系,列出雨滴的运动方程并考虑图中所示几何关系,即可求证.由此可以想像如果让水从一个旋转的有很多小孔的喷头中飞出,从不同小孔中飞出的水滴将会落在半径不同的圆周上,为保证均匀喷洒对喷头上小孔的分布还要给予精心的考虑.解 (1) 如图(a)所示坐标系中,雨滴落地的运动方程为t ωR t x ==v (1)h gt y ==221 (2) 由式(1)(2)可得 g h ωR x 2222= 由图(a)所示几何关系得雨滴落地处圆周的半径为22221ωgh R R x r +=+= (2) 常用草坪喷水器采用如图(b)所示的球面喷头(θ0 =45°)其上有大量小孔.喷头旋转时,水滴以初速度v 0 从各个小孔中喷出,并作斜上抛运动,通常喷头表面基本上与草坪处在同一水平面上.则以φ角喷射的水柱射程为gR 2sin 0v = 为使喷头周围的草坪能被均匀喷洒,喷头上的小孔数不但很多,而且还不能均匀分布,这是喷头设计中的一个关键问题.1 -21 一足球运动员在正对球门前25.0 m 处以20.0 m·s-1 的初速率罚任意球,已知球门高为3.44 m .若要在垂直于球门的竖直平面内将足球直接踢进球门,问他应在与地面成什么角度的范围内踢出足球? (足球可视为质点)分析 被踢出后的足球,在空中作斜抛运动,其轨迹方程可由质点在竖直平面内的运动方程得到.由于水平距离x 已知,球门高度又限定了在y 方向的范围,故只需将x 、y 值代入即可求出.解 取图示坐标系Oxy ,由运动方程θt x cos v =, 221sin gt θt y -=v 消去t 得轨迹方程 222)tan 1(2tan x θg θx y +-=v以x =25.0 m,v =20.0 m·s-1 及3.44 m≥y ≥0 代入后,可解得71.11°≥θ1 ≥69.92°27.92°≥θ2 ≥18.89°如何理解上述角度的范围?在初速一定的条件下,球击中球门底线或球门上缘都将对应有两个不同的投射倾角(如图所示).如果以θ>71.11°或θ <18.89°踢出足球,都将因射程不足而不能直接射入球门;由于球门高度的限制,θ 角也并非能取71.11°与18.89°之间的任何值.当倾角取值为27.92°<θ <69.92°时,踢出的足球将越过门缘而离去,这时球也不能射入球门.因此可取的角度范围只能是解中的结果.1 -22 一质点沿半径为R 的圆周按规律2021bt t s -=v 运动,v 0 、b 都是常量.(1) 求t 时刻质点的总加速度;(2) t 为何值时总加速度在数值上等于b ?(3) 当加速度达到b 时,质点已沿圆周运行了多少圈?分析 在自然坐标中,s 表示圆周上从某一点开始的曲线坐标.由给定的运动方程s =s (t ),对时间t 求一阶、二阶导数,即是沿曲线运动的速度v 和加速度的切向分量a t,而加速度的法向分量为a n =v 2 /R .这样,总加速度为a =a te t+a n e n .至于质点在t 时间内通过的路程,即为曲线坐标的改变量Δs =s t -s 0.因圆周长为2πR,质点所转过的圈数自然可求得.解 (1) 质点作圆周运动的速率为bt ts -==0d d v v其加速度的切向分量和法向分量分别为b t s a t -==22d d , Rbt R a n 202)(-==v v 故加速度的大小为R )(402222bt b a a a a t tn -+=+=v 其方向与切线之间的夹角为⎥⎦⎤⎢⎣⎡--==Rb bt a a θt n 20)(arctan arctan v (2) 要使|a |=b ,由b bt b R R=-+4022)(1v 可得 bt 0v = (3) 从t =0 开始到t =v 0 /b 时,质点经过的路程为b s s s t 2200v =-= 因此质点运行的圈数为bRR s n π4π220v == 1 -23 一半径为0.50 m 的飞轮在启动时的短时间内,其角速度与时间的平方成正比.在t =2.0s 时测得轮缘一点的速度值为4.0 m·s-1.求:(1) 该轮在t′=0.5s的角速度,轮缘一点的切向加速度和总加速度;(2)该点在2.0s内所转过的角度.分析 首先应该确定角速度的函数关系ω=kt 2.依据角量与线量的关系由特定时刻的速度值可得相应的角速度,从而求出式中的比例系数k ,ω=ω(t )确定后,注意到运动的角量描述与线量描述的相应关系,由运动学中两类问题求解的方法(微分法和积分法),即可得到特定时刻的角加速度、切向加速度和角位移.解 因ωR =v ,由题意ω∝t 2 得比例系数322s rad 2-⋅===Rtt ωk v 所以 22)(t t ωω== 则t ′=0.5s 时的角速度、角加速度和切向加速度分别为12s rad 5.02-⋅='=t ω2s rad 0.24d d -⋅='==t tωα 2s m 0.1-⋅==R αa t总加速度n t t n R ωR αe e a a a 2+=+= ()()2222s m 01.1-⋅=+=R ωR αa在2.0s内该点所转过的角度rad 33.532d 2d 203202200====-⎰⎰t t t t ωθθ 1 -24 一质点在半径为0.10 m 的圆周上运动,其角位置为342t θ+=,式中θ 的单位为rad,t 的单位为s.(1) 求在t =2.0s时质点的法向加速度和切向加速度.(2) 当切向加速度的大小恰等于总加速度大小的一半时,θ 值为多少?(3) t 为多少时,法向加速度和切向加速度的值相等?分析 掌握角量与线量、角位移方程与位矢方程的对应关系,应用运动学求解的方法即可得到. 解 (1) 由于342t θ+=,则角速度212d d t tθω==.在t =2 s 时,法向加速度和切向加速度的数值分别为 22s 2s m 30.2-=⋅==ωr a t n 2s 2s m 80.4d d -=⋅==t ωr a t t(2) 当22212/t n t a a a a +==时,有223n t a a =,即 ()()422212243t r rt = 得 3213=t此时刻的角位置为 rad 15.3423=+=t θ(3) 要使t n a a =,则有()()422212243t r rt = t =0.55s1 -25 一无风的下雨天,一列火车以v 1=20.0 m·s-1 的速度匀速前进,在车内的旅客看见玻璃窗外的雨滴和垂线成75°角下降.求雨滴下落的速度v2 .(设下降的雨滴作匀速运动)分析 这是一个相对运动的问题.设雨滴为研究对象,地面为静止参考系S,火车为动参考系S′.v 1 为S′相对S 的速度,v 2 为雨滴相对S的速度,利用相对运动速度的关系即可解.解 以地面为参考系,火车相对地面运动的速度为v 1 ,雨滴相对地面竖直下落的速度为v 2 ,旅客看到雨滴下落的速度v 2′为相对速度,它们之间的关系为1'22v v v += (如图所示),于是可得 1o 12s m 36.575tan -⋅==v v 1 -26 如图(a)所示,一汽车在雨中沿直线行驶,其速率为v 1 ,下落雨滴的速度方向偏于竖直方向之前θ 角,速率为v 2′,若车后有一长方形物体,问车速v 1为多大时,此物体正好不会被雨水淋湿?分析 这也是一个相对运动的问题.可视雨点为研究对象,地面为静参考系S,汽车为动参考系S′.如图(a)所示,要使物体不被淋湿,在车上观察雨点下落的方向(即雨点相对于汽车的运动速度v 2′的方向)应满足hlαarctan ≥.再由相对速度的矢量关系122v v v -=',即可求出所需车速v 1.解 由122v v v -='[图(b)],有θθαcos sin arctan221v v v -= 而要使hlαarctan ≥,则 hl θθ≥-cos sin 221v v v ⎪⎭⎫ ⎝⎛+≥θh θl sin cos 21v v 1 -27 一人能在静水中以1.10 m·s-1 的速度划船前进.今欲横渡一宽为1.00 ×103 m 、水流速度为0.55 m·s-1 的大河.(1) 他若要从出发点横渡该河而到达正对岸的一点,那么应如何确定划行方向? 到达正对岸需多少时间? (2)如果希望用最短的时间过河,应如何确定划行方向? 船到达对岸的位置在什么地方?分析 船到达对岸所需时间是由船相对于岸的速度v 决定的.由于水流速度u 的存在, v 与船在静水中划行的速度v ′之间有v =u +v ′(如图所示).若要使船到达正对岸,则必须使v 沿正对岸方向;在划速一定的条件下,若要用最短时间过河,则必须使v 有极大值.解 (1) 由v =u +v ′可知v '=u αarcsin ,则船到达正对岸所需时间为。
第一章习题答案

第⼀章习题答案选择题、1、MCS-51系列单⽚机的CPU主要由 A 组成。
A、运算器、控制器B、加法器、寄存器C、运算器、加法器D、运算器、译码器2、单⽚机中程序计数器⽤来 C 。
A、存放指令B、存放正在执⾏的指令的地址C、存放下⼀条指令的地址D、存放上⼀条指令的地址3、8031单⽚机的/EA引脚A 。
A、必须接地B、必须接5V电源C、可悬空D、按需要⽽定4、外部扩展存储器时,分时复⽤数据线和地址线的是 A 。
A、P0⼝B、P1⼝C、P2⼝D、P3⼝5、PSW中的RS1、RS0⽤来 A 。
A、选择⼯作寄存器组B、指⽰复位C、选择定时器D、选择⼯作⽅式6、单⽚机复位后,PC的内容为 A 。
A、0000HB、0003HC、000BHD、0800H7、intel8051单⽚机是 C 位的。
A、16B、4C、8D、准168、程序是以 C 形式存放在程序存储器中的。
A、C语⾔源程序B、汇编程序C、⼆进制编码D、BCD码9、MCS-51系列单⽚机的程序计数器PC是16位的,其寻址范围是 D 。
A、8KBB、16KBC、32KBD、64KB10、MCS-51系列单⽚机的ALE引脚是以晶振频率的C 固定频率输出正脉冲,因此它可以作为外部时钟或外部定时脉冲使⽤。
A、1/2B、1/4C、1/6D、1/12(1) A (2)C (3)A (4) A (5)A(6) A (7)C (8)C (9) D (10)C填空题1、单⽚机应⽤系统是由硬件系统和软件系统组成的。
2、除了单⽚机和电源外,单⽚机最⼩系统还包括时钟和复位电路。
3、在进⾏单⽚机应⽤系统设计时,除了电源和地线引脚外,XTAL1 、XTAL2 、RST 和EA引脚信号必须连接相应电路。
4、MCS-51单⽚机的XTAL1和XTAL2 是时钟电路引脚。
5、MCS-51系列单⽚机的存储器共有4个物理存储空间,即⽚内数据存储器、⽚内程序存储器、⽚外数据存储器和⽚外程序存储器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通信电子线路 习题 绪论0-1 什么是载波?什么是调制信号和基带信号?给出调制的定义。
解:由振荡电路输出的、其频率可保证天线的长度大大下降到实际能发射的高频信号称为载波。
待发射的有用的模拟信号为调制信号;有用的模拟信号转换为数字信号称为基带信号;调制是指携带有用信息的调制信号去控制高频载波信号。
0-2 为什么要进行调制?给出两种理由。
解:根据天线理论,天线的长度与电信号的波长需可比拟,发射的电信号必须是高频信号;而且,直接发射调制信号会导致信道混叠。
0-3 给出无线广播的中波和短波的各自频率范围。
解:中波(MF):0.3~3MHz短波(HF):3~30MHz0-4 给出中国移动通信GSM 的载波频率范围。
解:GSM 的频段:GSM900:上行880~915MHz , 下行925~960MHz ;GSM1800:上行1710~1785MHz , 下行1805~1880MHz ; GSM1900:1850~1910MHZ ,1930~1990MHZ ; 上行和下行组成一频率对, 上行就是手机发射、机站接收;下行就是基站到手机。
0-5将下列功率转换为dBm 值。
WWWWμ25)4(;0001.0)3(;001.0)2(;1)1(2222====P P P P解:(1) 30dBm; (2) 0dBm; (3)-10dBm; (4)-16dBm0-6 一通信系统的电压为2.15V ,负载阻抗50Ω,转换为dBm(50)值。
解:19.66dBm(50)第一章 习题一1-1. 某单级中频放大器的调谐频率为465kHz ,调谐回路包含一电容为200pF 与一电感并联,电感的品质因数Q 0=100,不考虑任何负载影响。
试计算此放大器的电压增益和通频带,如果回路两端并联一负载阻抗R L =40k Ω,那么电压增益和通频带变为多少? 解:(1) Ω=⨯⨯⨯⨯==-k 1711020010465π210012300p C Q R ω, A V0=R p =171000, ,dB 104)171000log(200==V A kHz 65.410010465BW 300=⨯==Q f(2),32400,k 4.324017140171//'p 'V0L p 'p ==Ω=+⨯==R A R R R,dB 90)32400log(20'V 0==A kHz 5.2495.18465BW ,95.181714.32100,L 0'L p'p0L ====⨯=∴=Q f Q R R Q Q1-2. 如题图E1.1所示,场效应管的转移导纳g m =3mA/V ,漏级输出阻抗R ds =120k Ω,如果电感线圈损耗r =2.0Ω,调谐回路的调谐频率为850kHz 。
试求:E1.1 题1-2图(1) 调谐回路的电容C =?(2) 忽略负载影响,最大电压增益为多少? (3) 通频带为多少? 解:(1) pf195180)10850()π2(10)π2(1232620=⨯⨯⨯==Lf C(2) ,k 54.46121019510180126p Ω=⨯⨯⨯==-Cr LR 总的回路并联阻抗为,k 24.95120//54.461//ds p T Ω===R R R 72.28524.953T m V 0=⨯==∴R g A(3),9918010850π2101024.953630L =⨯⨯⨯⨯⨯==L R Q T ωk H z59.89910850BW 3L 0=⨯==Q f1-3. 如题图E1.2所示,晶体管的参数为y oe =20μS ,线圈L 品质因数为Q 0=45,调谐频率为460kHz ,计算放大器的通频带。
,dB 49)285log(200==V AE1.2 题1-3图解:Ω=⨯⨯⨯⨯==-k 58.1510110460π2459300p C Q R ω 总的并联阻抗 ,k 62.1050//100//58.15)//()1//(L oep T Ω===R y R R 68.301010460π21062.109330T L =⨯⨯⨯⨯⨯==-C R Q ω,kHz 15BW L==Q f 1-4. 某中频调谐放大器电路如题图E1.3所示。
调谐频率为465kHz ,L 1=350μH ,两个晶体三极管具有相同的参数:R ie =3.75k Ω,y fe =90S ,y oe =15μS 。
计算:E1.3 题1-4图(1) 回路电容值C ;(2) 变压器的次级与初级线圈比值; (3) 最大电压增益。
解:回路电容 pf335350)10465()π2(10)π2(12326120=⨯⨯⨯==L f C237.0,1,10357.14151033510350oe ie oe2ie 612611p ==∴=Ω⨯=⨯⨯⨯==-y R p y p R Cr L R总的并联阻抗 ,k 3.33)//()1//(2ie oe p T Ω==pR y R R 711103.3390237.03fe T V 0=⨯⨯⨯==∴y pR A , 20lg(711)=57dB1-5. 题图E1.4为一电容抽头的并联振荡回路,谐振频率为1MHz ,C 1=100pF ,C 2=400pF ,求回路电感L 。
若Q 0=100,R L =2k Ω,求回路有载品质因数Q L 和通频带。
E1.4 题1-5图解:总电容pf 802121=+=C C C C C ,mH 32.0π210≈∴=L LCf接入系数:2.0211=+=C C C p ,R L 折合到回路两端的等效阻抗:Ω==k 502L 'Lp R R , k Ω20000p ==L Q R ω,总的并联阻抗k Ω40//'L p T ==R R R ,有载品质因数200TL ==L R Q ω,带宽kHz 50BW L0==Q f 1-6. 调谐放大器如题图E1.5所示,调谐频率为465kHz ,调制信号的最高频率为5kHz ,电感L =300μH ,Q 0=90,晶体管输出导纳y oe =8μS ,负载阻抗R L =5.36k Ω,在调谐频率处电压增益不得小于250,电感总匝数为70。
试确定L 1部分匝数、必要的通频带宽和晶体管的y fe 。
E1.5 题1-6图解:207.01081036.5,K 1251081163oe L 26oe 2L =⨯⨯⨯==Ω=⨯==--y R p y p R151==∴pN N 匝。
Ω==Ω==k 78.34)21//(,k 8.78oep T 00p y R R L Q R ω kHz 625.11BW ,401030010465π21078.3406330T L ==∴≈⨯⨯⨯⨯⨯==-LQ f L R Q ω ms 35,250fe T fe V 0≥∴≥=y R py A1-7. 单回路调谐放大器如题图E1.6所示,已知工作频率f 0=465kHz ,通频带BW=10kHz ,回路空载时Q 0=100,晶体管参数:g ie =0.5mS ,g oe =60μS ,|y fe |=30mS 。
试求:E1.6 题1-7图(1) 回路的有载品质因数Q L ;(2) 若不考虑回路固有损耗,放大器的最大功率增益为多少(dB)? (3) 若考虑回路损耗,则放大器的最大功率增益又为多少(dB)? 解:(1) 5.46kHz10kHz 465BW 0L ====f Q (2)dB8.38)7500lg(10)dB (,75001060105.04)1030(4max p06323oe ie 2fe maxp0===⨯⨯⨯⨯⨯==---A g g y A (3)dB3.33)2145lg(10)dB (,7.2146)1005.461(7500)1(0p 220L max p0p0==∴=-⨯=-=A Q Q A A1-8. 如题图E1.7所示,工作频率f 0=465kHz ,L =560μH ,Q 0=100,晶体三极管Q1和Q2参数相同:y ie =1.7ms ,y oe =290μs ,y fe =32ms 。
通频带BW = 35kHz 。
试求:E1.7 题1-8图(1) 阻抗匹配时的接入系数p 1、p 2; (2) 阻抗匹配时的谐振功率增益(dB); (3) 回路的插入损耗(dB)。
解:(1)μS 95.451μS,11.61,3.1335465BW L000p 0L ========LQ g LQ g f Q T ωω108.0μs,84.392,ie 22'ie p T 'oe 'ie =∴==-=+p g p g g g g g262.01,ie 21'oe =∴=p g p g(2) 回路的插入损耗dB 25.1)dB (,7516.0)1(12L 1-==-=ηηQ Q(3) 匹配时的谐振功率增益3.3907516.04,1,4oeie 2fe0p 221oeie 2fe0p =⨯=∴=⨯⨯=g g y A g g y A ηηηdB 9.25lg 10)dB (0p 0p ==A A1-9. 单级小信号谐振放大器的交流等效电路如图E1.8所示,要求谐振频率f 0=10MHz ,通频带BW=500kHz ,谐振电压增益A V0=100。
在工作点和工作频率上测得晶体管的y 参数为μS )40j 20(,mS )5j 20(0,mS ,)5.0j 2(oe fe re ie +=-=≈+=y y y y如果电感品质因数Q 0=60,计算谐振回路参数L 、C 和外接电阻R 的值。
E1.8 题1-9图解:由,100fe0V ==Tg y A 得,μS 16.206100520220V fe T =+==A y g 0e p T g g g g ++=如下图:所以 μH 86.3101021020610500776300T =⨯⨯⨯⨯⨯==-πωf g BW L ,pF 65102105001010206BW 737600T =⨯⨯⨯⨯⨯==-πωf g C , 又 μS 03.6800p ==Q Cg ω,所以μS 118e 0p T =--=g g g g ,R =8.5k Ω。
1-10.三级相同的单调谐中频放大器级联,工作频率f 0=450kHz ,总电压增益为60dB ,总带宽为8kHz 。
求每一级的增益、3dB 带宽和有载品质因数Q L 值。
解:10dB,2020lg dB,60lg 60lg 20,1V V1V1V 31V V32V 1V V ==∴===⨯⨯=∑∑A A A A A A A A A由于 kHz 7.15BW ,12BW kHz 8,12BW BW 3/1/1≈∴-=-=∑n29kHz7.15kHz 450BW 0L ≈===f Q 1-11. 一个晶体管IF 放大器如题图E1.9所示。