电机设计第4部分.
MotorSolve 4.0 电机设计使用手册

1 MotorSolve 界面
主要包括电机管理面板、参数输入面板以及显示窗口。 电机管理面板主要包括命令栏、设计栏、结果栏以及材料栏。
1.1 整体界面
整体界面如上图 主界面中的主要菜单,
3
1.2 命令栏
菜单栏:
1)About 中包含了 MotorSolve 版本信息和授权 license 信息,显示到期时间,授权模块信息, license 路径和文件名。 2)Check for Updates
3. 软件安装....................................................................................................................................45 3.1 配置需求..........................................................................................................................45 3.2 MotorSolve 4.0 安装........................................................................................................45 3.3 license 申请.......................................................................................................................51 3.3.1 开始菜单提取方法................................................................................................51 3.3.2 工具提取方法........................................................................................................51 3.4 license 安装.......................................................................................................................51 3.4.1 浮动........................................................................................................................51 3.4.2 单机........................................................................................................................58 3.5 安装验证..........................................................................................................................59 3.6 帮助..................................................................................................................................59
电机设计

二.简答
在基于稳态模型的异步电动机调速系统中,基频以下调速时,为什么要进行低频补偿和电流补偿?
三.问答
1.画出运动控制系统以及组成,并分析各个组成单元的作用?请举例说明实际项目中各个组成部分及其对应关系?
P2图1-2
电动机运动控制系统的控制对象
功率放大与变换装置有电机型、电磁型、电力电子型
3.通常电机测速方法有三种,分别是M测速法、T测速法和M/T测速法。
4.数字PI调节器有两种算式:位置式和增量式。
5.对于异步电动机调速系统,在精度要求不高的场合,采用转速开环的变压变频调速系统和转速闭环的转差频率控制的变压变频调速系统。
6.在SVPWM的实现过程中,通常以开关损耗和谐波分量为原则,安排基本矢量和零矢量的作用顺序。有两种常用的SVPWM实现方法,分别是零矢量集中的实现方法和
Kδ——气隙系数,考虑到因槽口影响使气隙磁阻增加而引入的系数(>1)
按所衔接的是齿或是磁极可把轭分为极联轭和齿联轭两种
第四章参数计算
绕组中通以直流或交流电时,其电阻不同,前者称为直流电阻,后者称为交流电阻
通交流时,集肤效应,电阻比通直流时大。Kf’表示电阻增加系数。Re=Kf’R
电抗计算方法:1.磁链法;2.能量法
电机设计的任务:根据用户提出的产品规格(如功率、电压、转速等)、技术要求(如效率、参数、温升限度、机械可靠性等),结合技术经济方面国家的方针政策和生产实际情况,运用有关的理论和计算方法,正确处理设计时遇到的各种矛盾,从而设计出性能好、体积小、结构简单、运行可靠、制造和使用维修方便的先进产品。
从事电机设计工作的人员要注意贯彻国家的技术经济政策,并注意所设计电机得经济性和可靠性。既要努力使产品满足用户要求,又要尽可能的降低生产成本
《电机设计》(陈世坤)课后习题答案(期末复习资料).
电机设计第一章1.电机设计的任务是什么?答:电机设计的任务是根据用户提出的产品规格(功率、电压、转速)与技术要求(效率、参数、温升、机械可靠性),结合技术经济方面国家的方针政策和生产实际情况,运用有关的理论和计算方法,正确处理设计时遇到的各种矛盾,从而设计出性能好、体积小、结构简单、运行可靠、制造和使用维修方便的先进产品。
2.电机设计过程分为哪几个阶段?答:电机设计的过程可分为:①准备阶段:通常包括两方面内容:首先是熟悉国家标准,收集相近电机的产品样本和技术资料,并听取生产和使用单位的意见与要求;然后在国家标准有关规定及分析相应资料的基础上,编制技术任务书或技术建议书。
②电磁设计:本阶段的任务是根据技术任务书的规定,参照生产实践经验,通过计算和方案比较,来确定与所设计电机电磁性能有关的尺寸和数据,选定有关材料,并核算电磁性能。
③结构设计:结构设计的任务是确定电机的机械结构,零部件尺寸,加工要求与材料的规格及性能要求,包括必要的机械计算、通风计算和温升计算。
3.电机设计通常给定的数据有哪些?答:电机设计时通常会给定下列数据:(1)额定功率(2)额定电压(3)相数及相同连接方式(4)额定频率(5)额定转速或同步转速(6)额定功率因数感应电动机通常给定(1)~(5);同步电机通常给定(1)~(6); 直流电机通常给定(1)(2)(5)第二章1.电机常数C A 和利用系数K A 的物理意义是什么?答:C A :大体反映了产生单位计算转矩所消耗的有效材料(铜铝或电工钢)的体积,并在一定程度上反映了结构材料的耗用量。
K A :表示单位体积的有效材料所能产生的计算转矩,它的大小反映了电机有效材料的利用程度。
2.什么是主要尺寸关系式?根据它可以得出什么结论? 答:主要尺寸关系式为:δαAB K K n dp Nm ef 'p '2 6.1p l D =,根据这个关系式得到的重要结论有:①电机的主要尺寸由其计算功率P ˊ和转速n之比n p '或计算转矩T ˊ所决定;②电磁负荷A 和B δ不变时,相同功率的电机,转速较高的,尺寸较小;尺寸相同的电机,转速较高的,则功率较大。
微特电机第四章旋转变压器
微特电机第四章旋转变压器1.引言旋转变压器是一种特殊类型的变压器,它采用旋转结构来实现变压变比的调节。
与传统的固定变压器相比,旋转变压器具有更大的灵活性和可调节性,可以适应不同负载条件下的电压需求。
本章将介绍微特电机公司研发的一款旋转变压器,包括其工作原理、结构设计、性能参数以及应用领域等内容。
2.工作原理旋转变压器的工作原理基于电磁感应定律和旋转结构的机械转动。
通过调整转子与固定绕组之间的相对位置,可以改变绕组之间的耦合系数,从而实现变压变比的调节。
当转子与绕组之间没有相对运动时,变压器的变比为1:1,即输入电压等于输出电压。
当转子旋转时,绕组之间的耦合系数发生变化,从而实现不同的变比输出。
3.结构设计微特电机的旋转变压器采用了先进的磁力平衡技术和高强度材料制成的磁芯。
磁芯的设计旨在减小磁场漏磁和铁心损耗,提高变压器的效率和性能。
同时,采用了特殊的绕组结构和绝缘材料,确保了电压输出的稳定性和可靠性。
除此之外,旋转变压器还配备了高精度的角度传感器和控制单元,用于实时监测和调节转子位置,保证变压器的稳定工作。
4.性能参数微特电机的旋转变压器具有以下主要性能参数:-额定功率:根据客户需求可定制,通常范围在1kVA到100kVA之间。
-输入电压范围:根据客户需求可定制,通常范围在220V到660V之间。
-输出电压范围:根据客户需求可定制,通常范围在0V到440V之间。
-效率:高达98%,具有较高的能量转换效率。
-变比调节范围:根据客户需求可定制,通常范围在1:1到1:10之间。
-响应时间:微秒级响应速度,适用于需要快速反应的应用场景。
5.应用领域微特电机的旋转变压器广泛应用于各种工业领域,包括:-变频器和电机驱动系统:用于变频器输出电压的稳定调节。
-电力系统:用于电网电压调节和负载均衡控制。
-物流设备和自动化系统:用于包括输送带、起重机和机器人在内的设备的电压供应和控制。
-光伏发电系统:用于光伏逆变器中的电压调节和能量转换。
电机与运动控制课程设计
电机与运动控制课程设计一、课程目标知识目标:1. 理解电机的基本原理和分类,掌握电机在运动控制中的应用。
2. 学习电机的主要参数,如电压、电流、功率、转速等,并能运用相关公式进行计算。
3. 掌握电机运动控制的基本方法,包括启动、停止、正反转、调速等。
技能目标:1. 能够正确选择和使用电机,进行简单的运动控制电路设计。
2. 学会使用运动控制相关器件,如继电器、接触器、控制器等,完成电机控制电路的搭建。
3. 培养实际操作能力,能够独立完成电机运动控制实验,并对实验结果进行分析。
情感态度价值观目标:1. 培养学生对电机与运动控制技术的好奇心和探索精神,激发学生学习兴趣。
2. 培养学生的团队合作意识,学会在小组合作中共同解决问题,提高沟通与协作能力。
3. 增强学生的环保意识,了解电机在节能减排方面的作用,培养学生的社会责任感。
本课程针对高中年级学生,结合电机与运动控制相关知识,注重理论与实践相结合。
在教学过程中,关注学生特点,充分调动学生的主观能动性,培养其创新思维和实践能力。
通过本课程的学习,使学生能够掌握电机与运动控制的基本知识和技能,为后续相关专业学习打下坚实基础。
同时,注重培养学生的情感态度和价值观,使其成为具有创新精神和责任感的新时代青年。
二、教学内容1. 电机原理及分类:介绍电机的基本工作原理,包括电磁感应定律;讲解直流电机、交流电机、步进电机等常见电机类型及其特点和应用场景。
教材章节:第一章 电机原理与分类2. 电机主要参数:学习电机的主要技术参数,如电压、电流、功率、转速等;掌握相关计算公式和相互之间的关系。
教材章节:第二章 电机的主要技术参数3. 运动控制基本方法:讲解电机启动、停止、正反转、调速等基本控制方法;介绍相应控制器件,如继电器、接触器、控制器等。
教材章节:第三章 电机运动控制基本方法4. 运动控制电路设计:学习运动控制电路的设计原理,包括控制电路的搭建、调试和优化;进行实际操作练习。
电机型号各部分代表的意思(可编辑修改版).
电机型号含义系列+机座号+极数如:Y132S1-2第一部分汉语拼音字母Y表示异步电动机;第二部分数字表示机座中心高(机座不带底脚时,与机座带底脚时相同);第三部分英文字母为机座长度代号(S-短机座、M-中机座、L-长机座),字母后的数字为铁心长度代号;使用条件环境温度:不超过40℃。
海拔:不超过1000米。
相对湿度:不超过95℅额定电压:380伏。
额定频率:50赫兹。
接法:3千瓦及以下为Y接,4千瓦及以上为Δ接。
工作方式:连续(S1)。
三相异步电动机型号字母含义:J——异步电动机;O——封闭;L——铝线缠组;W——户外;Z——冶金起重;Q——高起动转轮;D——多速;B——防爆;R一绕线式;S——双鼠笼;K一—高速;H——高转差率。
JQO 2-52-4表示为封闭式高起动转矩异少电动机、5号机座、2号铁芯长度、4极。
电动机型号由产品代号,规格代号,特殊环境代号,补充代号等4部分组成。
并按下列顺序排列:[1]-[2]-[3]-[4]1-产品代号2-规格代号3-特殊环境代号4-补充代号产品代号包括类型代号,电动机特点代号,设计序号和励磁代号组成。
类型代号名称代号名称代号“交流”“异” Y{J} “安”全A 封闭型O “阀”门F “绕”线型R “管”道G 隔“爆”型 B 水“泵” B “多”速 D 采“煤”机用C{M}高“起”动转矩Q 装“岩”机用I “高”速K 回“柱”绞车Z 双鼠笼运输机S “通”风机T 高“滑”差H特点代号为表征电机的性能,结构或用途而采用汉语拼音字母。
如B{隔爆型},YB隔爆型异步电动机。
设计序号表示产品设计顺序,对第一次设计产品,不标设计序号。
电动机的规格代号包括机座号或中心高尺寸,功率,转速或极数,电压等级等。
其中机座长度采用国际通用字母表示,S-短机座,M-中机座,L 长机座。
特殊环境代号“高”原用G“船”{海}用H户“外”用W化工防“腐”用F“热”带用T“湿热”带用TH“干热”带用TA注:如同时适用于1个以上的特殊环境时,则按顺序排列。
电机学课程设计报告PPT课件
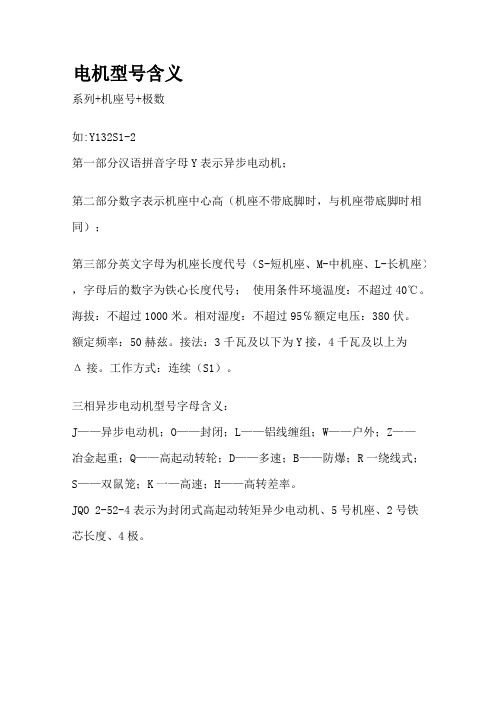
(a) 外形图
常开触点 (b) 结构
按钮开关的外形和符号
7
结
构1 符 号
2 3
SB
1 43
SB
按钮帽
复位弹簧 支柱连杆
常闭静触头
2
桥式静触头
4
常开静触头
外壳
SB
动画
名 常闭按钮 称 (停止按钮)
常开按钮 (起动按钮)
复合按钮
8
4.1.3 接触器
用于频繁地接通和断开大电流电路的开关电器。
(a) 外形
用于控制电路流 过的小电流 (无 需加灭弧装置)
属于同一器件的线圈和触点用相同的文字表示
常用的交流接触器有CJ10、CJ12、CJ20和3TB等系列。
接触器技术指标:额定工作电压、电流、触点数目等。
如CJ10系列主触点额定电流5、10、20、40、75、 120A等数种;额定工作电压通常是220V或380V。 11
KM 复合按钮
34
点动时: 按下SB3
电机运转 FR
~ SB1
先断开
SB2 SB3
KM
KM
通电 闭合
后闭合 自锁触点不起作用
35
松开SB3 FR
~ SB1
后闭合
SB2 SB3
KM
KM
断电 断开
先断开
36
松开SB3 电机停转 实现点动 用途:试车、检修以及车床主轴的调整等。
FR
~ SB1
后闭合
SB2 SB3
常用的熔断器有插入式熔断器、螺旋式熔断 器、管式熔断器和有填料式熔断器。 符号 FU
(熔1)断电器灯额、定电电炉流等IF电的阻选性择负
载
IF > IL
电机电机设计第2版——高等学校教材陈世坤主编
m1 m2
(
N1Kdp1 N2 Kdp2
)2
R2
m1, m2 定转子相数
N1, N2 每相串联匝数 Kdp1, Kdp2 基波绕组系数
4.1 绕组电阻的计算
二、感应电机 2、感应电机转子绕组每相电阻 (2)鼠笼绕组
特点:ⅰ) m2 Z2 是多相绕组,相数等于转子槽数;
Kdp2 1
N2
1 2
4.3 主电抗计算
二、异步电机励磁电抗的计算方法
2、计算 X m
(7)
X
* m
Xm U N
I N1X m U N
EN1 U N
N1 N
FN1 FN
IN1
FN1, N1, EN1 —由定子额定电流产生的基波磁势、基波磁通及所感生电势
( I0 IN1 假想) EN1 I0Zm IN1(rm xm ) Im xm
m1 (2 lef 0
2m
p
NKdp1I
1
ef
)N1Kdp1
0
2m
p
(
NKdp1)2
I
2
lef
ef
4.3 主电抗计算
二、异步电机励磁电抗的计算方法
2、计算 X m
(6)
Xm
m1 2I
2
f
4
f 0
N2 pq
lef
m
4
f
0
(NKdp1)2 p
lef
ef
m
2
m Kd2p1
q ef
主磁路的比磁导
ⅰ)端环电阻 → 导条
端环电阻:
RR
DR w
Z2 AR
RR
w
DR
Z2 AR
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.1 小型三相同步发电机设计
8、磁路计算 磁路计算的主要目的是计算电机的空载特性、短路比及满载励 磁电流。 确定磁路各部分的磁密是否合理。凸极同步电机的磁 路计算包括:气隙磁势,定子齿磁势,定子轭磁势,极身磁势, 转子轭磁势及第二气隙磁势(磁极和磁轭之间的气隙)六部分。 对整体凸极和隐极电机没有第二气隙磁势。 9、参数计算 计算定、转子机的损耗:1)铁耗 定子齿和轭的铁耗;2)定 子铜耗;3)励磁损耗;4)机械损耗;5)附加损耗。 效率计算和感应电机的一样。
Kc ---饱和短路比,对自励恒压发电机 Kc 0.25 0.7 ;
K0 ---经验系数,K0 0.22
0.24 , A ---线负荷 ,
B N ---额定工况的气隙磁密, ---极距。
目前小型同步发电机的气隙一般取 0.5 3、定转子槽数及槽形
2.5mm 。
小型三相同步发电机定子每极每相槽数一般选用整数槽,
第4部分 同步电机设计
4.1 小型三相同步发电机设计 4.2 永磁同步发电机设计 4.3 异步起动永磁同步电动机设计
4.1 小型三相同步发电机设计
4.1.1 小型三相同步发电机设计的主要问题 小型三相同步发电机电磁设计是在已确定的视在功率或有功功 率、电压、相数、频率、功率因数、转速等额定值的情况下, 按产品技术要求确定电磁负荷、有效部分尺寸、绕组数据及性 能参数等。 1、电磁负荷的取值范围:设计时如果想要少用铜,在选择电 磁负荷时,要尽可能用较高的气隙磁密和电枢电密,而线负荷 A要尽可能取得低;若设计时要少用铁,则应适当提高线负荷 A 。由于F级绝缘材料的发展和运用,电磁负荷的取值也相应 地提高。目前小型同步发电机的电磁负荷的取值范围如下表:
4.1 小型三相同步发电机设计
小型凸极同步电机的励磁绕组一般采用漆包圆线或漆包扁导线。 7、阻尼绕组的设计 现代中大型发电机一般设有阻尼绕组。发电机装置阻尼绕组, 不仅使发电机运行稳定,也可以减少发电机在短路或跳闸时的 电枢过电压及励磁绕组的过电压。 凸极发电机的阻尼绕组是装在极靴的表面。阻尼绕组由伸出 极靴铁心槽的阻尼条与两端的端环焊接组成。 小型隐极发电机由于转子磁极铁心采用整块合金钢锻成,合 金钢具有阻尼效果,故小型隐极发电机不再装置阻尼绕组。中 大型隐极发电机装置阻尼绕组,阻尼条装置在转子铁心安置励 磁绕组的开设槽的槽楔下,端环装在中心环里。
q 3、 4、 5 。为了消除齿谐波电势对电压的影响,定子或转子采
用斜槽,一般是斜一个齿距。
4.1 小型三相同步发电机设计
从工艺考虑,隐极式转子从过去的采用大小槽结构(便于气隙 磁场正弦分布),到现在采用等槽结构,一般每极的有效槽数 大都采用 6 8 槽。 小型三相同步发电机定子槽形一般采用
梨形或梯形半闭口槽形, 如图。
4.2 永磁同步发电机设计
永磁同步发电机设计的主要问题:永磁材料的选择、永磁体尺 寸、转子结构尺寸、定子绕组和定子冲片的确定、磁路计算、 电压调整率和短路计算。
4.3 异步起动永磁同步电动机设计
4.3.1异步起动永磁同步电动机设计的主要问题 永磁同步电动机由永磁(体)提供磁场,没有了电励磁同步电 动机中的电刷及励磁电源。 1、异步起动永磁同步电动机的结构 异步起动永磁同步电动机由定子和转子组成。 1)定子结构 永磁同步电动机的定子结构和感应电机的相同。
永磁同步电动机由于永磁体的放置原因,转子很难斜槽,通常 采用定子斜槽。转子笼型绕组有铜条焊接式和铸铝式两种,和 感应电机的笼型转子绕组一样。 ◆永磁体的固定方式有两种:①采用在永磁体上涂树脂,再将 永磁体插入转子铁心,树脂凝固后将永磁体和转子固定在一起; ②将永磁体插入转子铁心,然后在铁心两端加非磁性端环固定 在转子铁心上。 2.异步起动永磁同步电动机的转子磁极结构 根据永磁体放置在铁心的位置,将转子磁极分为表面式和内置 式两种转子磁极结构。
4、电枢绕组的设计 小型低压发电机一般采 用半闭口槽和散下的双 层叠绕组。在采用单相 三次谐波绕组提供励磁 功率的发电机,电枢
4.1 小型三相同步发电机设计
绕组常设计为单双层绕组(双层短距绕组,每槽中同相位的上、 下线圈边组成一个新的单层线圈边,与同相属的另一个类似槽 中的新的单层线圈边组成一个线圈,详细见西交大电机设计 p233)。单相谐波绕组放在单层线圈的槽内,其节距为电枢绕 组整距的 1 3 。 5、磁极结构和形状的选择 小型三相同步发电机的转子磁极结构分为凸极和隐极两种结构。 采用何种结构,是各个生产厂家的的工艺决定的。凸极结构, 气隙不均匀,一般取气隙最大气隙长度 与最小气隙长度 max min (磁极轴线处的气隙 , min ) 之比为: max 1.5 ; min 极弧系数 a 0.70 0.75 。对于采用三次谐波励磁的发电机,
4.1 小型三相同步发电机设计
一般 max
min 1.2 1.3 ;对于30kW以下的发电机,为了制造
方便,采用均匀气隙。 隐极结构,采用均匀气隙。
20世纪70年代末期发展了兼顾凸极和隐极结构优点的整体凸极 叠片转子磁极结构称整体式凸极结构。这种结构的磁极和磁轭 为一体,由0.5mm或0.65mm薄钢片整片冲出,冲片叠压并经 氩弧焊焊成一体,叠装在轴上,在铁心上喷涂绝缘漆或者包绝 缘。励磁绕组由绕线机直接绕到极身上,边绕边涂线圈胶,然 后整体浸漆烘干。 6、励磁绕组设计 励磁绕组设计包括确定励磁绕组匝数、导线尺寸以及励磁系统 对额定励磁电压和额定励磁电流的要求。
4.1 小型三相同步发电机设计
(同容量的电机,F级的绝缘电机的体积比B级的绝缘电机的体 积小,气隙磁密一样,但体积小的定子齿等铁心的磁密要高些)
4.1 小型三相同步发电机设计
K0 A Kc 103 cm 小型发电机的气隙长度可由公式确定,即: B N
2、气隙长度 的确定
2)转子结构 转子分为实心永磁转子和笼型永磁转子两种。 ◆实心永磁转子结构铁心由整块钢加工而成,上面铣出槽以放置 永磁体。起动时,旋转磁场在转子铁心中感应涡流产生起动转矩。 ◆笼型永磁转子是最常见的结构,转子铁心由0.5mm厚的硅钢 片叠压而成,上面冲有均匀的槽,通常是半闭口槽。
4.3 异步起动永磁同步电动机设计