自动控制系统系统期末考试总复习题目
(完整版)自动控制原理期末考试复习题及答案

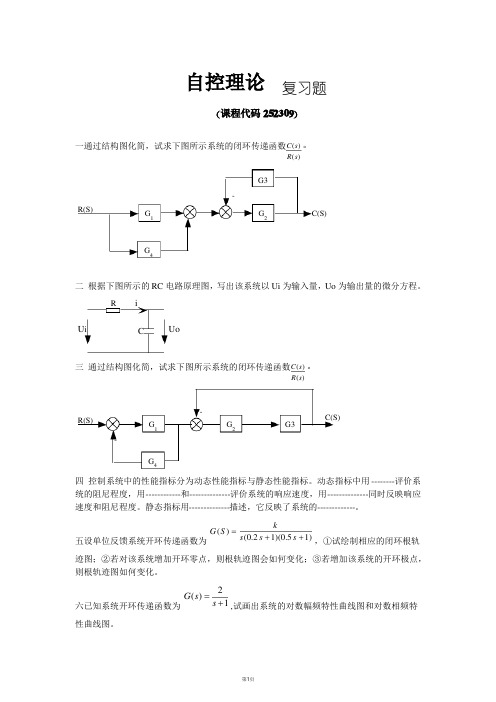
(完整版)⾃动控制原理期末考试复习题及答案⼀、填空题1、线性定常连续控制系统按其输⼊量的变化规律特性可分为_恒值控制_系统、随动系统和_程序控制_系统。
2、传递函数为 [12(s+10)] / {(s+2)[(s/3)+1](s+30)} 的系统的零点为_-10_,极点为_-2__,增益为_____2_______。
3、构成⽅框图的四种基本符号是:信号线、⽐较点、传递环节的⽅框和引出点。
4、我们将⼀对靠得很近的闭环零、极点称为偶极⼦。
5、⾃动控制系统的基本控制⽅式有反馈控制⽅式、_开环控制⽅式和_复合控制⽅式_。
6、已知⼀系统单位脉冲响应为t e t g 5.16)(-=,则该系统的传递函数为。
7、⾃动控制系统包含_被控对象_和⾃动控制装置两⼤部分。
8、线性系统数学模型的其中五种形式是微分⽅程、传递函数、__差分⽅程_、脉冲传递函数_、__⽅框图和信号流图_。
9、_相⾓条件_是确定平⾯上根轨迹的充分必要条件,⽽⽤_幅值条件__确定根轨迹上各点的根轨迹增益k*的值。
当n-m ≥_2_时, 开环n 个极点之和等于闭环n 个极点之和。
10、已知⼀系统单位脉冲响应为te t g 25.13)(-=,则系统的传递函数为__。
11、当∞→ω时⽐例微分环节的相位是: A.90 A.ο90 B.ο90- C.ο45 D.ο45-12、对⾃动控制的性能要求可归纳为_稳定性__、_快速性_和准确性三个⽅⾯,在阶跃响应性能指标中,调节时间体现的是这三个⽅⾯中的_快速性___,⽽稳态误差体现的是_稳定性和准确性_。
13、当且仅当离散特征⽅程的全部特征根均分布在Z 平⾯上的_单位圆 _内,即所有特征根的模均⼩于___1____,相应的线性定常离散系统才是稳定的。
14、下列系统中属于开环控制系统的是 D.普通数控加⼯系统A.电炉箱恒温控制系统B.雷达跟踪系统C.⽔位控制系统D.普通数控加⼯系统15、某单位负反馈系统在单位阶跃信号作⽤下的系统稳态误差0=ss e ,则: B.意味着该系统的输出信号的稳态值为1 A.意味着该系统是⼀个0型系统 B.意味着该系统的输出信号的稳态值为1 C.意味着该系统没有输出信号 D.意味着该系统具有⽐较⾼的开环增益16、⼀阶系统11)(+=Ts s G 在单位斜坡信号作⽤下,系统的稳态误差为 T 。
自动控制原理期末期末复习题

自动控制原理期末复习题一、填空题1.反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2.复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3.两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4.若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
5.根轨迹起始于 ,终止于 。
6.设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
7.PI 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
8.在水箱水温控制系统中,受控对象为 ,被控量为 。
9.自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 ;含有测速发电机的电动机速度控制系统,属于 。
10.稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 。
判断一个闭环线性控制系统是否稳定,在时域分析中采用 ;在频域分析中采用 。
11.传递函数是指在 初始条件下.线性定常控制系统的 与 之比。
12.设系统的开环传递函数为2(1)(1)K s s Ts τ++,则其开环幅频特性为 ,相频特性为 。
13.频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对应时域性能指标 ,它们反映了系统动态过程的 。
14.对自动控制系统的基本要求可以概括为三个方面,即: .快速性和 。
15.控制系统的 称为传递函数。
一阶系统传函标准形式是 ,二阶系统传函标准形式是 。
16.在经典控制理论中,可采用 .根轨迹法或 等方法判断线性控制系统稳定性。
自控期末考试试题及答案

自控期末考试试题及答案一、选择题(每题2分,共20分)1. 自动控制系统中,开环系统是指:A. 系统有反馈回路B. 系统没有反馈回路C. 系统有前馈回路D. 系统有控制回路2. 系统稳定性分析中,根轨迹法的基本原理是:A. 系统根随参数变化的轨迹B. 系统根随时间变化的轨迹C. 参数随系统根变化的轨迹D. 时间随参数变化的轨迹3. PID控制器中,P代表:A. 比例B. 积分C. 微分D. 比例-积分4. 以下哪个不是控制系统的性能指标:A. 稳态误差B. 响应速度C. 稳定性D. 系统成本5. 状态空间法中,状态变量的选取原则是:A. 系统输入B. 系统输出C. 系统内部变量D. 系统外部变量6. 在控制系统中,超调量是指:A. 系统达到稳态时的误差B. 系统响应过程中的最大偏差C. 系统响应时间D. 系统稳态误差7. 闭环控制系统的传递函数是:A. G(s)H(s)B. G(s)/[1+G(s)H(s)]C. 1/[1+G(s)H(s)]D. G(s)*[1+H(s)]8. 控制系统的频率响应分析中,奈奎斯特判据的主要用途是:A. 确定系统稳定性B. 确定系统性能C. 确定系统响应速度D. 确定系统超调量9. 以下哪个不是控制系统的类型:A. 线性系统B. 非线性系统C. 离散系统D. 随机系统10. 系统设计中,最小相位系统是指:A. 系统相位随频率增加而增加B. 系统相位随频率增加而减少C. 系统相位为零D. 系统相位为常数二、简答题(每题10分,共30分)1. 解释什么是系统的时间响应,并列举至少三种常见的时间响应类型。
2. 描述PID控制器的设计过程,并解释各部分的作用。
3. 阐述状态空间法与传递函数法在控制系统分析中的不同应用。
三、计算题(每题25分,共50分)1. 给定一个二阶系统,其传递函数为:G(s) = (2s + 1) / (s^2 +3s + 2)。
计算该系统的单位阶跃响应,并画出其响应曲线。
《自控理论》期末考试复习题及答案
N(S)
R(S)
1/S
-
1/(S+1)
C(S)
1
G(S) 10
十二已知开环传递函数为
S(S 4) , 若 输 入 信 号 为
求稳态误差。
十三 简述开环控制和闭环控制的含义,并分别说出其特点。
十四 已知控制系统结构图如下图所示,试求系统传递函数C(S) 。 R(S)
r(t)=4+6t+3t2,
H1(S)
R(S)
-
G1(S)
G2(S)
C(S)
G3(S)
十五 已知系统的闭环特征方程为 3S4+10S3+5S2+S+2=0,试用劳斯判据分析系统的稳定性。
若系统不稳定,指出不稳定根的个数。
十六 求出下图所示系统的开环和闭环传递函数。
R(s)
C(S)
K
1
-
0.05s 1
s
十七 设单位反馈系统开环传递函数为 G(S)
系统不稳定,指出不稳定根的个数。 8 已知系统开环传递函数为 G(s) 10 ,试画出系统的对数幅频特性曲线图和对数相频特
2s 1
性曲线图。
9 设单位反馈控制系统的开环传递函数为G(S)
2K
,试绘制根轨迹。
S(S 1)(S 2)
参考答案
C(s) (G G )G
1
1
42
R(s) 1 G G
23
性曲线图。
第1页
七简述奈氏稳定判据。 八自动控制系统从控制的基本方式看可分为哪三种控制?并分别介绍每种控制。
九已知一单位反馈系统的开环传递函数为G(s)
25 s(s 6)
,试计算其动态性能指标(σ%,tp
自动控制原理复习试题库20套及答案

一、填空(每空1分,共18分)1.自动控制系统的数学模型有微分方程 、 传递函数 、 频率特性 、结构图 共4种。
2.连续控制系统稳定的充分必要条件是 闭环极点位于S 平面左侧 。
离散控制系统稳定的充分必要条件是 系统的特性方程的根都在Z 平面上以原点为圆心的单位圆内。
。
3.某统控制系统的微分方程为:dtt dc )(+0.5C(t)=2r(t)。
则该系统的闭环传递函数 Φ(s)= ;该系统超调σ%= ;调节时间t s (Δ=2%)= 。
4.某单位反馈系统G(s)=)402.0)(21.0()5(1002+++s s s s ,则该系统是 4 阶 二 型系统;其开环放大系数K= 62.5 。
5.已知自动控制系统L(ω)曲线为:则该系统开环传递函数G(s)= ;ωC = 。
6.相位滞后校正装臵又称为 调节器,其校正作用是 。
7.采样器的作用是 ,某离散控制系统)()1()1()(10210TT e Z Z e Z G -----=(单位反馈T=0.1)当输入r(t)=t 时.该系统稳态误差为 。
二. 1.求图示控制系统的传递函数.求:)()(S R S C (10分)2.求图示系统输出C (Z )的表达式。
(4分)R(s)三、 计算1、 已知t Te tf 11)(--=求F (s )(4分)2、 已知)5(1)(2+=s s s F 。
求原函数f (t )(6分3.已知系统如图示,求使系统稳定时a 的取值范围。
(10分)四.反馈校正系统如图所示(12分)求:(1)K f =0时,系统的ξ,ωn 和在单位斜坡输入下的稳态误差e ss .(2)若使系统ξ=0.707,k f 应取何值?单位斜坡输入下e ss .=?五.已知某系统L (ω)曲线,(12分)(1)写出系统开环传递函数G (s ) (2)求其相位裕度γ(3)欲使该系统成为三阶最佳系统.求其K=?,γmax =?六、已知控制系统开环频率特性曲线如图示。
自动控制系统考试试题

自动控制系统考试试题一、选择题(每题 3 分,共 30 分)1、自动控制系统中,反馈的作用是()A 消除偏差B 减小偏差C 增大偏差D 维持偏差2、以下属于随动控制系统的是()A 恒温控制系统B 液位控制系统C 雷达跟踪系统D 压力控制系统3、系统的开环传递函数为 G(s)H(s) = K /(s(s + 1)),则其型别为()A 0 型B I 型C II 型D III 型4、对于一个稳定的系统,其相角裕度应该()A 大于 0B 小于 0C 等于 0D 不确定5、根轨迹的分支数等于()A 开环极点的个数B 开环零点的个数C 开环极点数与零点数之差D 开环极点数与零点数之和6、频率特性的对数幅频特性图中,纵坐标表示()A 幅值B 幅值的对数C 相角D 频率7、下列哪种校正方式可以提高系统的稳态精度()A 超前校正B 滞后校正C 滞后超前校正D 都不能8、采样系统中,采样周期 T 越大,则()A 系统稳定性越好B 系统稳定性越差C 对系统稳定性无影响D 不确定9、离散系统的脉冲传递函数定义为()A 输出脉冲序列与输入脉冲序列之比B 输出采样信号与输入采样信号之比C 输出离散信号与输入离散信号之比D 以上都不对10、状态空间表达式中,状态变量的个数等于()A 系统的阶数B 系统的输入量个数C 系统的输出量个数D 系统的零极点个数二、填空题(每题 3 分,共 30 分)1、自动控制系统由_____、_____、_____、_____和_____五部分组成。
2、控制系统的性能指标通常包括_____、_____、_____、_____和_____。
3、线性系统稳定的充分必要条件是其闭环特征根都具有_____。
4、根轨迹起始于_____,终止于_____。
5、频率特性可以由_____、_____和_____三种图形来表示。
6、系统的校正方式包括_____、_____和_____。
7、采样定理指出,采样频率必须大于信号最高频率的_____倍。
自控复习题答案

自控复习题答案一、选择题1. 自动控制系统的基本组成包括哪些部分?A. 传感器、控制器、执行器B. 传感器、控制器、执行器、反馈回路C. 控制器、执行器、被控对象D. 传感器、控制器、执行器、被控对象答案:B2. 在控制系统中,开环控制系统与闭环控制系统的主要区别是什么?A. 开环系统没有反馈,闭环系统有反馈B. 开环系统成本较低C. 开环系统响应速度慢D. 开环系统稳定性差答案:A3. 控制系统的稳定性可以通过哪些方法进行分析?A. 时域分析B. 频域分析C. 根轨迹法D. 所有以上方法答案:D二、简答题1. 简述PID控制器的工作原理。
答:PID控制器是一种常见的工业控制器,它根据误差信号(设定值与实际输出值之差)来调节控制量。
P(比例)项根据误差的大小调节输出,I(积分)项对误差进行积分,以消除稳态误差,D(微分)项对误差的变化率进行调节,以提高系统的响应速度和稳定性。
2. 什么是系统的超调,它对系统性能有什么影响?答:系统的超调是指系统在达到最终稳定状态之前,输出值超过设定值的现象。
超调会导致系统的控制精度降低,稳定性变差,甚至可能引起系统的振荡或损坏设备。
三、计算题1. 已知一个控制系统的开环传递函数为G(s) = 10 / (s^2 + 4s + 5),求该系统的单位阶跃响应。
答:首先,我们需要计算闭环传递函数,然后应用拉普拉斯变换的逆变换来求得时间域的响应。
由于这是一个二阶系统,我们可以使用标准形式的二阶响应公式来求解。
具体计算过程需要根据系统的自然频率和阻尼比来确定。
四、论述题1. 论述现代控制系统中,数字控制技术相较于模拟控制技术的优势。
答:数字控制技术相较于模拟控制技术具有以下优势:(1)数字控制系统可以方便地实现复杂的控制算法;(2)数字控制器具有更好的灵活性和可扩展性;(3)数字控制系统的精度更高,抗干扰能力更强;(4)数字控制技术可以方便地实现远程监控和诊断;(5)数字控制系统的成本随着技术的发展逐渐降低,性价比更高。
《自动控制系统》总复习资料整理总结及练习题库
• 8.正弦函数的拉氏变换是( )
• A G(s) 1 B
s
G(s) 1
s2 2
•
C
G(s)
s2
2
D
G(s)
s2
s
2
• 9. 一般为使系统有较好的稳定性,希望相角 裕度γ为( )
• A.0~15° B.15°~30° C.30°~ 60° D.60°~90°
• 10. 终值定理的数学表达式为(
• 解析:极点为-2和-5,在负实轴上,根据根 轨迹法,为B。
• 5, 某环节的传递函数是 G(s) 5s 3 2 ,则该 环节可看成由( )环节串联而组成s。
• A.比例、积分、滞后 B.比例、惯性、微分 C.比例、微分、滞后 D.比例、积分、微分
• 6. 二阶系统的传递函数 尼比ζ是( )
A、
B、
C、
D、与是否为单位反馈系统有关
,则该系统的闭环特征方程为
23、闭环系统的动态性能主要取决于开环对数幅频特性的:
A、低频段
B、开环增益
C、高频段
D、中频段
24.已知单位反馈系统的开环传递函数为 时,系统的稳态误差是( )
A、 0 ; B、 ∞ ; C、 10 ; D、 20
,当输入信号是
25.关于P I 控制器作用,下列观点正确的有( ) A、 可使系统开环传函的型别提高,消除或减小稳态误差; B、 积分部分主要是用来改善系统动态性能的; C、 比例系数无论正负、大小如何变化,都不会影响系统稳定性; D、 只要应用P I控制规律,系统的稳态误差就为零。
R(s)
_
G1
G4
G2
G3
H1
C(s)
R(s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直流调速单闭环系统
一、画出带电流截止负反馈的闭环直流调速系统稳态结构框图。
二、画出转速负反馈闭环直流调速系统稳态结构框图。
三、试述反馈控制的基本规律。
四、回答下列问题:
(1)在转速负反馈单闭环有静率调速系统中,突减负载后又进入稳定运行状态,此时晶闸管整流装置的输出电压U d 较之负载变化前是增加、减少还是不变? (2)在无静差调速系统中,突加负载后又进入稳态时转速n 和整流装置的输出电压U d 是增加、减少还是不变? 单闭环系统计算题
一、有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*
u U =8.8V ,比例调节器放大系数K P =2,晶闸管装置放大系数K s =15,反馈系数γ=0.7。
求:
(1)输出电压U d 。
(2)若把反馈线断开,U d 为何值?开环时的输出电压是闭环时的多少倍?
(3)若把反馈系数减至γ=0.35,保持同样输出电压,给定电压*
u U 应为多少?
二、某龙门刨床工作台拖动采用直流电动机,其额定数据如下:60kW ,220V ,305A ,1000r/min ,采用闭环V-M 系统,主电路总电阻Ω=18.0R ,C e =0.2V·min/r ,K s =30,α=0.015 V·min/r ,问放大器的放大系数为多大时能满足闭环系统D =20,s ≤5%时的要求?
三、某直流调速系统电动机额定转速n N =1430r/min ,额定速降Δn N =115r/min ,当要求静差率s ≤30%时,允许多大的调速范围?如果要求静差率s ≤20%,则调速范围是多少?如果希望调速范围达到10,所能满足的静差率是多少? 四、某龙门刨床工作台拖动采用直流电动机,其额定数据如下:60kW ,220V ,305A ,1000r/min ,采用V-M 系统,主电路总电阻R =0.18Ω,电动机电动势系数C e =0.2V·min/r 。
如果要求调速范围D =20,静差率s ≤5%。
①采用开环调速能否满足?②为满足这个要求,系统的额定速降Δn N 最多能有多少?
五、有一V-M 调速系统,电动机参数为:P N =2.2kW ,U N =220V ,I N =12.5A ,
1500N =n r/min ,电枢电阻R a =1.2Ω,整流装置内阻R re c =1.5Ω
,触发整流环节的放
大倍数35s =K 。
要求系统满足调速范围D =20,静差率s ≤10%。
1.计算开环系统的静态速降Δn op 和调速要求所允许的闭环静态速降Δn cl 。
2.采用转速负反馈组成闭环系统,画出系统的静态结构框图。
3.调整该系统参数,使当V 15n =*U 时,I d =I N ,n =n N ,则转速负反馈系数α应该是多少?
4.计算放大器所需的放大倍数。
六、某直流系统电动机额定转速为min /1430r n N =,额定速降min /115r n N =∆,当要求静差率%30≤s 时,允许多大的调速范围?如果要求静差率%20≤s ,则调速范围有多少?如果希望调速范围达到10,所能满足的静差率是多少? 双闭环系统
一、在转速、电流双闭环调速系统中,两个调节器ASR 、ACR 均采用PI 调节器。
电动机参数:P N =3.7kW ,U N =220V ,I N =20A ,n N =1000r/min ,电枢回路总电阻R =1.5Ω,设V 8===*
*U U U cm im nm ,电枢回路最大电流I dm =40A ,电力电子变换器的放大系数K s =40。
求:
1.计算电流反馈系数β和转速反馈系数α。
2.当电动机在最高转速运行发生堵转时的U d0、U i *、U i 、U c 值。
二、画出双闭环直流调速系统的稳态结构框图。
三、如图转速、电流双闭环调速系统稳态运行时,两个调节器的输入偏差电压和输出电压各是多少?为什么?
四、1.转速、电流双闭环调速系统稳态运行时,两个调节器的输入偏差电压和输出电压各是多少?2.当转速给定信号*
n U 未改变,若增大转速反馈系数α,系统稳定后转速反馈电压U n 是增加还是减少?转速是增加还是减少?
五、已知转速电流双闭环直流调速系统输入阶跃信号*
n U 时的起动波形。
1.请标出三个阶段的位置并写出名称;
2.系统起动过程中主要是哪个阶段,电流有多大?
3.系统稳定运行后,电流是多少?
六、画出转速电流双闭环直流调速系统,当输入阶跃信号*
n U 时,系统起动的转速和电流的波形,并标明整个过渡过程按电流波形划分的三个阶段。
另写出这三个阶段的名称。
交流调速
一、 ①如何区别交-直-交变压变频器是电压源变频器还是电流源变频器?
②异步电动机矢量控制的基本思想是什么?
二、试绘出通用变频器-异步电动机调速系统的硬件结构图 三、解释SPWM 、CFPWM 和SVPWM 三种控制技术的含义。
四、何为矢量控制?矢量控制的基本思想是什么? 五、试述转差频率控制的基本思想。
六、试述异步电动机调速系统的分类。
七、说明异步电动机的动态数学模型是一个高阶、非线性和强耦合的多变量系统。
八、常用的交流PWM 有哪三种控制方式?
工程设计
一、某晶闸管供电的双闭环直流调速系统,电流环已设计完毕,其等效闭环
传递函数表示为:12/1)()(*+=
∑s s U s I i i a τβ
,已知数据为:τΣi =0.0037s ,β=0.05V/A ,α=0.007V·min/r ,I N =136A ,n N =1460 r/min ,C e = 0.132V·min/r; λ=1.5,
R Σ=0.5Ω,τm =0.18s ,τon =0.01s ,系统要求无静差,空载起动到额定转速时的速度超调量σn ≤10%。
试设计转速调节器,画出其电路图并计算R 、C 参数,设调节器输入回路电阻R 0=40K Ω。
二、某双闭环直流调速系统,已知:U N = 220V ,I N = 136A ,n N = 1500 r /min ,
)m in r (V 132.01e -⋅=/C ,λ =1.5,Ω5.0a =∑R ,τm = 0.18 s ,τ∑n = 0.018 s ,选h = 5。
试计算空载起动到n N 的上升时间t q 及过渡过程时间t s 。
1n
d
I 234
(a E I I
三、某晶闸管供电的双闭环直流调速系统,电流环已设计完毕,其等效闭环
传递函数表示为:12/1)()(*+=
∑s s U s I i i a τβ
,已知数据为:τΣi =0.0067s ,β=0.028V/A ,α=0.0041V·min/r , I N =136A ,n N =1500 r/min ,C e = 0.228V·min/r , λ=1.5,
R Σa =0.863Ω, τm =0.383s ,τon =0.005s ,系统要求无静差,空载起动到额定转速时的速度超调量σn ≤10%。
1.试设计转速调节器,画出其电路图并计算R 、C 参数,选调节器输入回路电阻R 0=20K Ω。
2.计算空载起动到额定转速的时间。