陀螺全站仪使用说明书
全站仪使用方法及使用步骤[五篇材料]
![全站仪使用方法及使用步骤[五篇材料]](https://img.taocdn.com/s3/m/b4abf44302d8ce2f0066f5335a8102d276a26132.png)
全站仪使用方法及使用步骤[五篇材料]第一篇:全站仪使用方法及使用步骤全站仪使用方法及使用步骤2009-08-04 12:55:56|分类:电脑 |标签: |举报 |字号大中小订阅全站型电子速测仪简称全站仪,它是一种可以同时进行角度(水平角、竖直角)测量、距离(斜距、平距、高差)测量和数据处理,由机械、光学、电子元件组合而成的测量仪器。
由于只需一次安置,仪器便可以完成测站上所有的测量工作,故被称为“全站仪”。
全站仪上半部分包含有测量的四大光电系统,即水平角测量系统、竖直角测量系统、水平补偿系统和测距系统。
通过键盘可以输入操作指令、数据和设置参数。
以上各系统通过I/O接口接入总线与微处理机联系起来。
微处理机(CPU)是全站仪的核心部件,主要有寄存器系列(缓冲寄存器、数据寄存器、指令寄存器)、运算器和控制器组成。
微处理机的主要功能是根据键盘指令启动仪器进行测量工作,执行测量过程中的检核和数据传输、处理、显示、储存等工作,保证整个光电测量工作有条不紊地进行。
输入输出设备是与外部设备连接的装置(接口),输入输出设备使全站仪能与磁卡和微机等设备交互通讯、传输数据。
目前,世界上许多著名的测绘仪器生产厂商均生产有各种型号的全站仪。
不同型号的全站仪,其具体操作方法会有较大的差异。
下面简要介绍全站仪的基本操作与使用方法。
(一)全站仪的操作与使用1.全站仪的基本操作与使用方法(1)测量前的准备工作1)电池的安装(注意:测量前电池需充足电)①把电池盒底部的导块插入装电池的导孔。
②按电池盒的顶部直至听到“咔嚓”响声。
③向下按解锁钮,取出电池。
2)仪器的安置。
①在实验场地上选择一点,作为测站,另外两点作为观测点。
②将全站仪安置于点,对中、整平。
③在两点分别安置棱镜。
3)竖直度盘和水平度盘指标的设置。
①竖直度盘指标设置。
松开竖直度盘制动钮,将望远镜纵转一周(望远镜处于盘左,当物镜穿过水平面时),竖直度盘指标即已设置。
随即听见一声鸣响,并显示出竖直角。
索佳 GP3130R R3陀螺全站仪 说明书
测量仪器GP3130R/R3索佳 陀 螺 全 站 仪!!!!使 用 说 明 书SET3130R:《SET130R系列全站仪使用说明书》:为日本测量仪器制造商协会标志测量仪器GP3130R/R3索佳 陀 螺 全 站 仪!!!!!!!!!!!!!!使 用 说 明 书前言陀螺全站仪GP3130R/R3由通过专用接口连接的SET3130R/R3电子全站仪和GP1陀螺仪两大部分组成。
特点z GP1陀螺仪内置一个悬挂陀螺马达,由于地球的自转而引起的进动性使得陀螺马达绕地球的子午线(真北)来回摆动。
关于GP1原理参见“20.附录:GP1原理”z结合GP1陀螺仪、SET3130R/R3全站仪和专用处理软件,SET仪器可计算出真北方向。
z真北方向的测定可采用两种不同的测量方法,即跟踪逆转点法和中天法。
z在不考虑磁场条件影响的情况下,真北方向测定的平均精度为±20"(0.006百分度/0.1角密耳)z计算出的真北方向可以很方便地从SET显示的水平角读数获取。
本说明书阅读方法z除特别说明外,本说明书均以“GP3130R”表示“GP3130R/R3”,以“SET” 表示“SET3130R/R3”。
z本说明书使用下列符号和约定::表示操作前应阅读的注意事项和重要内容。
:表示参阅章节的名称。
:表示补充说明。
:表示特别术语或操作的说明。
[测距] 等 :表示所显示的软键内容。
{ESCAPE} 等 :表示SET操作键盘或无线遥控键盘上的操作键。
目录1.安全操作注意事项 (1)2.注意事项 (5)3.激光安全信息 (7)4.仪器部件名称 (9)5.仪器连接 (10)6.基本操作 (12)6.1模式图 (12)6.2键功能 (13)7.电池充电 (16)8.测量前准备工作 (17)8.1测量前准备工作 (17)8.2结束测量 (20)9.测量模式介绍 (21)9.1测量模式选择 (21)9.2方位角显示模式 (22)10.逆转点跟踪测量法 (23)10.1确定逆转点 (24)10.2逆转点跟踪测量步骤 (25)11.中天测量法 (27)12.仪器常数测定 (31)13.错误信息 (36)14.故障查找 (37)14.1更换保险丝 (38)14.2更换灯泡 (39)15.仪器检校 (40)15.1悬挂带检查 (41)15.2零位调整 (42)15.3分划板调整 (43)16.标准配置 (45)17.技术指标 (48)18.规范 (50)19.通讯指令 (52)20.附录:GP1原理 (53)1.安全操作注意事项为确保安全操作,避免造成人员身体伤害或财产损失,本说明书使用“警告”或“注意”来提示应遵循的条款。
全站仪使用指导书
全站仪使用指导书1. 全站仪安装到三角架上,一只手紧握全站仪上方提手,用另一只手旋紧三角架锁母与全站仪联接,在完成旋紧动作前手不要离开全站仪提手。
三角架必需带安全装置。
2. 全站仪开关机:按住全站仪显示屏开关上方一个键即可开机,同时按开关上下两个键即关机。
3. 手操器开关:按手操器开关键即可完成开,当短时间不用时按一下即进入待机状态;按住开关键2秒钟左右会出现一个对画框:当长时间不用时,按Power off 键即可实现长时间关机。
当系统出现故障时按Reset 键即实现系统重新启动。
当进行系统重新启动时,会出现:如下对画框:按OK 键进行系统重装(一般情况下,不要进行系统重装!),按Cancel 键即退出重装。
4. 单击Start 键出现3DimObserverV4或在Promgrams 文件夹中找到3DimObserverV4程序,单击后进入操作程序。
5. 选择English(en)进行语言选择,点键进入操作界面。
按single sheet 栏,出现如下菜单:如果是有靶标则选择第一栏,如无靶标则选择第二栏。
其它用的较少。
6.坐标系统建立:点击测出第一点,点击测出第二点;点击下方键选则中的下拉菜单中的键进入新界面:点击进入以下界面。
点击选择点1和点2做为X轴上的两点,点进入点击选择点1做为坐标圆点,点入以下界面。
7.自动寻找已经测量的点:选中已测量的点的名称,点击键,点下拉菜单中的,再点下接菜单中的全站仪将自动旋转找到该测量点。
8.移位测量:将全站仪移位,重新调整水平;点击键,点下拉菜单中的进入以下界面;左边一栏为移动前所测点,右边栏为移位后所测点。
点左边的点然后点击OK 回到原先界面,全站仪移位完成。
移位检测:选择原先测过的点,点击,再点下接菜单中的全站仪将自动旋转找到该测量点,重新测量并检查该坐标数据,与移位前测量数量相同,证明全站仪移位后各点坐标数据不变,证明移位成功;可以找正其它点。
9.根据已知坐标数据,使用全站仪自动找出所需坐标点的实际位置。
陀螺全站仪使用方法
陀螺全站仪使用方法
陀螺全站仪是一种用于测量地面控制点坐标的仪器,其使用方法如下:
1. 设定基准点:选择一个已知坐标的控制点作为基准点,并将其坐标输入到陀螺全站仪。
2. 安装仪器:将陀螺全站仪安装在三脚架上,确保仪器水平放置。
3. 定位仪器:使用仪器内置的望远镜和准星,通过观察基准点等标志物,将仪器精确定位到控制点上。
4. 进行测量:通过仪器内置的触摸屏或遥控器,选择测量模式,并根据需要进行相应的测量操作,如测量水平、垂直、角度等。
5. 记录测量结果:测量完成后,将测量结果存储在仪器内部存储器中,或通过连接电脑进行导出和处理。
6. 数据处理:将测量的数据导入到后期处理软件中,进行坐标计算和误差校正等处理操作,得到最终的测量结果。
7. 定位下一个控制点:根据需要,移动仪器到下一个控制点,重复以上步骤,继续进行测量。
需要注意的是,使用陀螺全站仪时应注意保持仪器的稳定和精确定位,避免外部干扰和遮挡物的影响,以确保测量结果的准确性。
此外,使用陀螺全站仪需要具备一定的专业知识和技术技能,操作人员应具备相应的培训和资质。
陀螺全站仪使用说明书
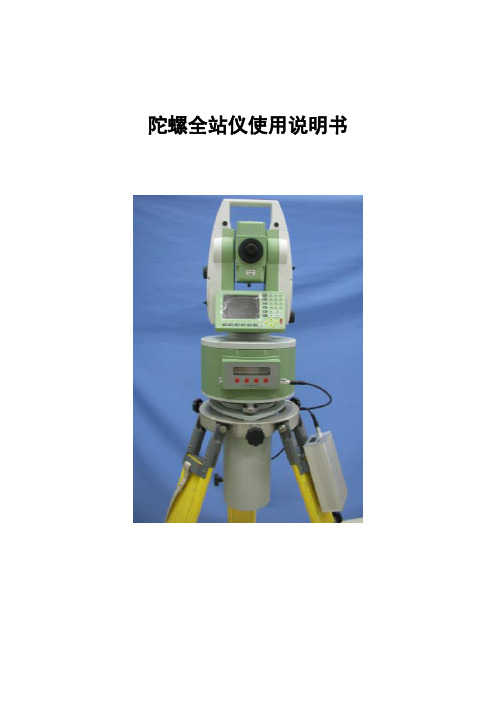
陀螺全站仪使用说明书目次1概述1.1功能和用途1.2主要性能参数2仪器组成3工作原理4使用方法4.1三脚架架设4.2陀螺全站仪主机架设4.3维度输入4.4测量程序4.5数据处理4.6仪器撤收5仪器常数标定5.1仪器常数标定方法5.2仪器常数修正方法6电源使用说明7典型故障及故障排除方法8使用注意事项9维护保养10仪器故障及解决方法1概述1.1功能和用途陀螺全站仪是全自动陀螺仪,其主要功能是提供北向方位基准,可为火炮、雷达提供初始方位基准,并可应用于大地测量、工程测量和矿山贯通测量等领域。
1.2主要性能参数仪器主要技术指标见表1。
表1 陀螺全站仪主要技术指标表2仪器组成产品配套情况见表2。
表2 陀螺全站仪产品配套表3工作原理陀螺全站仪的工作原理是用吊丝悬挂重心下移的陀螺灵敏部敏感地球自转角速度的水平分量,在重力作用下,产生一个北向进动的力矩,使陀螺敏感部主轴(即H向量)围绕子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号,转换为电信号,传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并对灵敏部进行加矩控制,解算出被测目标的北向方位角。
4使用方法陀螺全站仪主机的使用包括全站仪的使用,全站仪的详细使用方法参见相关全站仪的使用说明书。
4.1三脚架架设在测站架设三脚架,架设时应使三脚架的三个脚尖大致与测点标志中心基本等距,并注意脚架的张角和高度,伸缩脚架腿使圆水准器概略居中。
4.2陀螺全站仪主机架设陀螺全站仪主机架设按以下步骤进行操作。
a.取出陀螺全站仪主机。
三脚架架设完毕后,从包装箱中取出主机(切勿大角度倾斜或倒置),然后将其平稳置于三脚架上。
b.陀螺全站仪主机粗对北。
取出包装箱内的磁罗盘,按照其使用说明书规定的方法,确定当地大致北向;将陀螺寻北仪主机粗对北标记置于大致北向(北向可以借助磁罗盘确定,其使用方法见磁罗盘使用说明书);然后顺时针方向旋转锁紧三脚架上的三个对心手轮。
c.取出锂离子电池,放置在三脚架的固定位置上,然后将2芯电源电缆两端分别与主机和电池连接。
3-3陀螺全站仪操作方法打印版
3-3陀螺全站仪操作方法一、架设仪器1、架设三脚架,架腿螺丝拧紧。
开箱拿仪器,双手搬起仪器两边,放置三脚架上,根据待测边把陀螺仪放到架头中间的位置,以便在架腿上安防控制器和电池。
2、在安放仪器时,要注意读盘上的N指向接近北的位置,全站仪读盘上的红色箭头也指向一个接近北的位置【估计的方向】。
3、拧紧螺旋,固定住陀螺全站仪。
二、连接整平仪器1、三根连接线连接仪器,陀螺供电线、全站仪通讯线、控制器电源线。
卡口对准凹槽。
2、开机整平仪器(1)在开机之前,首先确认陀螺是锁紧状态,即从上往下看,逆时针方向拧紧(2)先开电源红色按钮,全站仪会自动打开,此时不要按下白色按钮。
开启之后全站仪会连续蜂鸣,表示全站仪和控制器通讯成功。
(3)整平仪器,使用电子气泡,按照指示调整即可。
(4)在使用之前,要在控制器上进入功能菜单,找到参数选项,输入当地的纬度,输入纬度的作用是便于粗寻北快速跟踪。
三、自摆零位观测1、在控制器上找到【测量】选项—【零位观测】—【自摆零位观测】。
2、下放陀螺,瞬时针拧开陀螺下放,过程要缓慢。
3、限幅。
使用下方陀螺手轮下面的小螺旋控制摆动幅度,把摆幅控制在±3分以内,当摆幅往正方向增大时限幅手轮逆时针旋转当摆幅往负方向增大时限幅手轮顺时针转动)根据其摆动的快慢程度来调整限幅手轮转动速度。
4、摆动幅度在3以内时,按下【确认】键,采集数据,大概五分钟左右,采集完成后,控制器会响一声提示。
按下确认键存储自摆零位。
5、托起锁紧陀螺。
控制器推到主界面。
四、粗北测量1、转动全站仪瞄准待测边端点。
2、启动电机(按下白色按钮),马达会启动,待控制器上的M不闪烁之后并听到控制器蜂鸣器响声,按下确认键。
3、下放陀螺,完全放下。
使用限幅手轮限幅在﹢100或﹣100之内,单边达到100以内即可。
按下【确认】键。
控制器显示采集数据,至采集完成会提示响一声。
4、托起陀螺。
5、转动全站仪使水平角为控制器上显示的数据。
陀螺全站仪简易操作步骤及注意事项

陀螺全站仪简易操作步骤及注意事项陀螺全站仪简易操作步骤及注意事项如下:1、对中,整平。
(注:摆脚架时,把脚架全部松开,然后将其端平(圆水准气泡)放到垂球下面,目估对中,踩紧脚架,紧固脚架;安防陀螺仪,调平,对中过程中,如果无法对中,根据垂球与仪器中心的关系升降脚架,让垂球与仪器中心反方向移动,并稍超过仪器中心,在调平对中,重复这个过程即可。
)2、在电控箱主界面上按“2”键,进行参数设臵。
(此过程是设臵测区纬度,一般情况不需要进行。
)3、设臵完成后,按“4”键返回主界面;(注:电源开关只是用于关注电源电压是否低于22V,低于22V必须换电源,该开关并不影响控制箱的运行,控制箱有单独开关进行控制。
)4、仪器预热,按“4”;(最好能够预热两次,并且每次预热后必须等5-10分钟才能开始下一步的操作。
)5、开始陀螺测量,按“1”;(之后进入自动陀螺测量工作,在这个过程中,禁止触碰仪器、脚架等)6、自动陀螺测量完毕后,选择输入数据模式;(注:“1”是自动将全站仪测量数据传输到控制箱,“2”是手动将全站仪测量数据输入到控制箱。
)7、选择“1”后,进入全站仪的普通测量功能,瞄准目标,按全站仪上的记录(F3)键即可将左盘测量数据传输到控制箱,并记录到手簿;之后,按主控面板上的“确认”,主界面跳到要求输入盘右读数,瞄准目标,按全站仪上的记录(F3)键即可将右盘测量数据传输到控制箱,记录到手簿。
8、按“确认键”,弹出选择显示数据项对话框;9、按“1”键,显示测量数据;10、按“.”建,显示所有测量的相关数据,记录基准值、静态零位、An及最后一个陀螺方位值即可;11、对比各次陀螺测量数据之间的差值,最好低于30″;(注:每次陀螺测量必须进行至少三次,且相邻两次陀螺测量方位的差值不得大于30″,若大于该值,需继续测量,直到连续三次测量的值满足上述要求方可。
)************************************************** 重要:在进入全站仪的普通测量功能后,禁止使用设站和角度归零两项功能,否则导致前期测量的仪器常数(正常情况下,每个仪器常数有效期为3个月)失效,要重测,耗费时间、人力。
HGG05型陀螺仪使用说明书

目次1 概述 (2)1.1 功能及用途 (2)1.2 组成 (2)1.3 主要技术指标及使用环境 (7)2 注意事项 (8)3 操作使用 (8)3.1 对使用人员的要求 (8)3.2 操作前准备 (8)3.3 通电及其检查程序 (9)3.4 调整 (10)3.5 操作程序和方法 (12)4 检测 (13)4.1 仪器常数的标定 (13)4.2 经纬仪(全站仪)检校 (13)4.3 激光对中检校 (13)4.4 仪器精度的测量 (14)5 维护与保养 (15)6 24V直流电池组的充电 (15)7 运输和储存 (16)7.1 运输 (16)7.2 储存 (16)8 标装与标配 (16)1概述1.1功能及用途HGG05型陀螺仪(上置经纬仪或全站仪)是一款全自动、全天候的精密定向仪器,可方便快速实现真北方位角的测量。
仪器操作方便、精度高,可广泛应用于矿山、隧道及井下的定向测量。
1.2组成全套仪器由陀螺仪主机、电控箱、电池、三脚架以及连接电缆、电源线和附件组成。
主机上方架设的经纬仪或全站仪标准配置为南方测绘DT-02L型电子经纬仪或南方测绘NTS960型全站仪。
仪器供电方式可选用220V交流或24V直流,采用24V直流供电时,使用配备的电池及相应的电源线与电控箱连接;采用220V交流供电时,使用相应的电源线直接1.主机2.三脚架3.电源线4.电控箱5.电池6.连接电缆图2 仪器外形图(图中上置为标准配置南方测绘DT-02L型电子经纬仪)1.2.1主机主机由陀螺仪和经纬仪(全站仪)组成,构成见图3。
经纬仪(全站仪)用于照准目标读数;脚螺旋用于架设仪器时调平经纬仪(全站仪)上的水泡;主机上的不锈钢标牌指北标记在仪器初始架设时朝北;底部激光对中器激光点架设时对准测站点;电缆插座用于与电缆线连接。
1.经纬仪(全站仪)2.陀螺仪3.电缆插座4.脚螺旋5.激光对中6.仪器标牌图3 陀螺仪主机1.2.2电控箱电控箱是陀螺仪控制、操作和参数设置的主体,主要由控制电路板、操作按键、液晶显示板等组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺全站仪使用说明书目次1概述功能和用途主要性能参数2仪器组成3工作原理4使用方法三脚架架设陀螺全站仪主机架设维度输入测量程序数据处理仪器撤收5仪器常数标定仪器常数标定方法仪器常数修正方法6电源使用说明7典型故障及故障排除方法8使用注意事项9维护保养10仪器故障及解决方法1概述功能和用途陀螺全站仪是全自动陀螺仪,其主要功能是提供北向方位基准,可为火炮、雷达提供初始方位基准,并可应用于大地测量、工程测量和矿山贯通测量等领域。
主要性能参数仪器主要技术指标见表1。
表1 陀螺全站仪主要技术指标表≤15 (1)055-20 C +50C-40 C +50C2仪器组成产品配套情况见表2。
表2 陀螺全站仪产品配套表3工作原理陀螺全站仪的工作原理是用吊丝悬挂重心下移的陀螺灵敏部敏感地球自转角速度的水平分量,在重力作用下,产生一个北向进动的力矩,使陀螺敏感部主轴(即H向量)围绕子午面往复摆动,通过光电传感器将陀螺灵敏部往复摆动的光信号,转换为电信号,传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并对灵敏部进行加矩控制,解算出被测目标的北向方位角。
4使用方法陀螺全站仪主机的使用包括全站仪的使用,全站仪的详细使用方法参见相关全站仪的使用说明书。
三脚架架设在测站架设三脚架,架设时应使三脚架的三个脚尖大致与测点标志中心基本等距,并注意脚架的张角和高度,伸缩脚架腿使圆水准器概略居中。
陀螺全站仪主机架设陀螺全站仪主机架设按以下步骤进行操作。
a.取出陀螺全站仪主机。
三脚架架设完毕后,从包装箱中取出主机(切勿大角度倾斜或倒置),然后将其平稳置于三脚架上。
b.陀螺全站仪主机粗对北。
取出包装箱内的磁罗盘,按照其使用说明书规定的方法,确定当地大致北向;将陀螺寻北仪主机粗对北标记置于大致北向(北向可以借助磁罗盘确定,其使用方法见磁罗盘使用说明书);然后顺时针方向旋转锁紧三脚架上的三个对心手轮。
c.取出锂离子电池,放置在三脚架的固定位置上,然后将2芯电源电缆两端分别与主机和电池连接。
d.取出通讯电缆,将通讯电缆两端分别接主机和全站仪。
e.陀螺全站仪主机调平。
打开全站仪电源开关,通过按键进入电子水泡界面,通过主机的三个角螺旋将水泡调平。
f.对心操作。
将垂球悬于仪器下面的挂钩上,移动三脚架,使垂球顶点位于测点标志中心附近(仪器自身所在的点位),利用三脚架上的对心手轮精确对心,然后再次按e步骤调平全站仪主机,否则可能给设备造成严重损坏。
维度输入仪器架设结束后,打开电池盒开关,陀螺全站仪上电自检后,显示屏显示仪器当前的温度和工作点纬度,例如图1:图1陀螺全站仪在“面板按键”控制方式下完成寻北工作,面板上共有4个按键分别为:“翻滚”、“返回”、“确认”、“停止”。
面板按键示意图见图2图2 面板按键示意图按“翻滚”键,纬度值的十位数字闪动,按“翻滚”键改变闪动的数字,按“停止”键将闪动的数字设为当前值,纬度值个位闪动,按“翻滚”键改变闪动的数字,按“停止”键闪动的数字设为当前值。
按“确认”键保存当前设置的纬度值,数字不再闪动。
按“确认”键进入测量界面(如图3)。
测量程序进入测量程序后,显示如图3:图3注:MODE1:代表“模式一”寻北,寻北时间:10分钟;SystemSetting:代表系统参数设置,包括两类参数:显示屏亮度设置参数(100% 75% 50%)和仪器常数参数设置。
按“确认”键,MODE1测量程序开始运行。
在寻北过程中,显示面板实时显示仪器的当前工作状态,显示如图4:图4注:STEP-1:代表步骤一,MODE1模式寻北分为三步骤进行,在寻北过程中先后出现STEP-1、STEP-2、STEP-3的工作状态信息。
MD1:代表寻北模式;XXXs:代表寻北时间:单位(s);Working…:代表仪器目前处于正常工作状态。
寻北测量结束时,伴随有蜂鸣器的响声提示用户,同时显示屏出现如图5所示信息,表示寻北结束,用户可以瞄准待测目标。
图5打开通用全站仪电源开关,通过按键进入测量水平方位角的菜单界面,用全站仪的照准部对待测目标点进行精确对准后,按下寻北仪显示面板“确认”键,陀螺全站仪显示屏上显示的角度即为北向方位角(如图6所示)。
图6在同一地点测试,用户可以根据需要只进行一次寻北工作,完成不同目标点北向基准的测试,只需在上述步骤结束后(见图6),瞄准不同的目标点,再次按寻北仪主机上的“确认”键,自动显示不同待测目标点的北向方位角。
注意:陀螺全站仪完成进行多次寻北测量时,每两次测量之间,系统应断电10分钟后,再按上述节~节 的内容进行重复操作即可。
数据处理按上述方法观测6~9组实测值。
∑=-=n1n 1i iαα (1)用下式可计算寻北精度和一次寻北误差Δαi :1)(12--±=∑=-n a ni i ασ (2)Δαi =αi -αN …………………………………………(3)式中: N a —基准边方位值;a i —每次在基准方位上的测量值; n —观察次数,一般取6~9组。
仪器撤收先关闭全站仪上电源开关,再关闭锂离子电池盒开关,取下主机与电池盒之间的电源电缆,取下主机与全站仪之间的通讯电缆,松开对心手轮后,从三脚架上平稳地取下主机并放在主机包装箱中;再将取出的有关附件一一放回主机包装箱原处,然后锁上主机包装箱,最后合上三脚架。
5仪器常数标定对基准边的精度要求:不大于5″(三等天文基准边)。
仪器常数标定方法仪器常数测试方法同精度测试操作方法相似,只是在条数据处理上有所区别,按~进行寻北测试后,测试结果记为αgi 则:K i =N gi a a - (4)式中: αN —基准边方位角;K i —第i 次测量得到的仪器常数。
仪器常数K 为:∑==n1i iKK (5)式中: n =6~9。
仪器常数修正方法计算出仪器常数后,应通过陀螺全站仪显示屏的“SystemSetting ”选项进入参数设置模式,参加图3所示,通过“翻滚”键,选择“SystemSetting ”选项后,按“确认”,显示如图7所示:图7按“翻滚”键,选择“”,按“确认”键,进入仪器常数设置界面,显示如图8所示:图8显示屏上显示仪器原有出厂时的仪器常数,按节计算出K值后,仪器常数修改公式如下:新仪器常数=旧仪器常数+K。
修改方式与节的纬度输入的按键控制方式相同。
6电源使用说明锂离子电池性能及其供电说明陀螺全站仪使用锂离子电池供电,电池组每次充足电后,在环境温度为10~50℃时,可以连续工作15次;在环境温度为-20℃时,可以连续工作6次。
当电池电量指示灯出现少于5个指示灯亮的时候,应充足电后再使用。
当电池贮存超过一个月,应充足电后再使用。
锂离子电池充电器说明电池盒及充电器照片见图9,充电器输入:AC220V±10V,50Hz。
电池充电方法:连接充电器与电池盒,当打开电池开关时,充电器指示灯为红色,表示电池正在充电,若为绿色,表示电池已经充满或电池开关没有打开。
电池充电时间:≤5小时。
图9 锂离子电池盒及充电器照片7典型故障及故障排除方法陀螺全站仪在工作过程中具有一定故障保护功能,主要包括:紧急退出功能图10当寻北仪工作过程中出现如图10状态信息,仪器自动进入紧急退出程序,原因可能为:a.人为判断有紧急情况,按下显示面板上的“停止”键,仪器自动进入紧急退出程序;b.寻北测量过程中,仪器自动测量陀螺马达转速有波动,进入保护程序;c.设备测量过程中,有突然断电的情况发生,再次上电后,仪器自动进入保护程序。
故障处理方法:当出现如图10所示状态信息,用户只需要等待5分钟后,关闭电池电源,再次上电后便可重新进入正常工作状态。
仪器初始架设角度偏差过大保护功能图11图12当寻北仪工作过程中出现如图11或图12状态信息,表示操作者初始架设寻北仪偏离北向过大,超出了10范围,寻北仪自动进入保护测序。
注:“RIGHT”:提示用户应该顺时针转动架设仪器;“LEFT”:提示用户应该逆时针转动架设仪器;故障处理方法:当出现如图11、图12所示状态信息,用户只需要等待5分钟后,关闭电池电源,重新调整好仪器的初始架设角度,再次上电后便可重新进入正常工作状态。
8使用注意事项全自动陀螺全站仪为特殊的精密基准测量设备,虽然该仪器具有较高的自动化程度,但对操作者仍有严格的要求,操作者在使用仪器前必须仔细阅读本说明书,并且经过一定培训,在初步了解仪器工作特点后方能使用。
使用或检查仪器时必须牢记以下注意事项:▲a. 在仪器进入寻北测量前,必须先调平陀螺寻北仪主机,否则可能对设备造成严重损坏;当由于人为原因忘记调平陀螺寻北仪主机,已经进入测量程序,也应该立即按下“停止”键,使设备进入保护程序,减少对设备的损坏程度。
▲b.如遇突然断电情况,不要立即搬运设备,应该重新上电,使仪器自动运行复位程序,等待10min后才可以对设备进行正常操作;▲c. 禁止对全站仪进行水平角度清零工作,并且应将全站仪的水平角度增量方式设为右,即顺时针转动全站仪为水平角度的递增方向,否则设备将无法正常使用。
▲d. 在仪器进入寻北测量过程中,切记不可碰触或操作仪器及三脚架,也不可在仪器附近做可能产生振动影响的动作;e. 仪器架设的地点应选择基础稳定的地方,避免车辆和人等振动因素影响其工作;f. 在搬运仪器时,要小心轻放,严禁大角度倾斜或倒置;g. 仪器架设时要注意三脚架大致调平,且三个支腿锁紧可靠,仪器锁紧螺钉尽量松开(便于仪器放置);h. 在进行电缆插拔时,必须捏住电缆插头插拔,切不可拉扯电缆;i. 寻北仪两次测量时间间隔不少于10min;j. 在仪器进入寻北测量过程中,用户可以按仪器显示面板上的“停止”键,仪器自动进入紧急退出程序,当显示屏左上方显示“EXIT”时,表示退出成功,用户可以断电5分钟后重新进行寻北测量。
k. 仪器使用时应尽量避免太阳光长期直射;雨、雪天使用时,应采取防护措施,避免雨、雪直接落到仪器表面;l. 如果仪器使用环境温度与仪器存放温度相差大于15℃,应将仪器提前放置在工作环境温度下稳定2~4h。
▲为操作者操作时应该特别注意事项9维护保养a.每个月应对仪器作一次通电检查,电池盒进行充电一次。
b. 仪器应注意防霉,包装箱内干燥剂应定期更换;在潮湿环境中工作一定时间后,应将仪器放入高温箱中进行40~45℃烘干;c. 仪器外表应保持清洁,清洗时要保证液体不会侵入仪器内部。
10仪器故障及解决方法发现设备工作故障时,请用户记录好故障显现(显示屏显示的信息),不可擅自打开机箱检查,需厂家专业人员进行检修,必要时应将仪器进行返厂检修。
陀螺全站仪精度检查表基准边方位角():测试日期:测试者:检验员:数据处理(结果保留小数点后一位有效数据):一次寻北误差:一次寻北误差最大值:寻北精度:式中:n—寻北测量次数, i=1,2n;—n次寻北测量结果的平均值;寻北时间:。