四轴气动布局
四轴 原理

四轴原理
四轴原理即为四旋翼飞行器的工作原理。
四旋翼飞行器由四个相对对称的旋翼组成,每个旋翼都由一个电动机驱动,并通过控制电路进行精确的调节。
四轴飞行器的飞行原理是通过对四个旋翼的转速进行精确控制,实现悬停、上升、下降、前进、后退、向左、向右平移以及旋转等多种飞行动作。
具体原理如下:
1. 升力平衡原理:四个旋翼产生的升力将飞行器维持在空中,飞行器的重力与升力平衡,实现悬停状态。
2. 空气动力学平衡原理:四个旋翼的转速可以通过电机转速控制器进行精确调节,进而调节各个旋翼产生的升力大小,实现空气动力学平衡。
3. 控制算法原理:通过搭载的传感器(如加速度计、陀螺仪、磁力计等)实时监测飞行器的姿态信息,将监测到的数据传输给飞行控制器。
飞行控制器根据姿态信息计算出相应的控制指令,通过电调调节四个旋翼的转速,控制飞行器的姿态。
如需向前飞行,则增加后面两个旋翼的转速,减小前面两个旋翼的转速,使飞行器倾斜向前。
类似地,对其他方向的飞行也是通过对相应旋翼转速的调节实现的。
4. 电源与电路原理:四轴飞行器通过电池为电动机提供能量,电路控制系统将飞行器的控制信号转化为电流和电压输出供电给电动机。
通过对四个旋翼的转速进行精确控制,在合适的气动力学平衡和姿态控制下,四轴飞行器能够实现精确悬停、稳定飞行及各种飞行动作,具有广泛的应用前景。
混合动力通勤飞机推进系统气动布局研究

混合动力通勤飞机推进系统气动布局研究
伍庭佳;王宇;李湘;张帅
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)3
【摘要】使用VSPAERO气动分析模块,以X-57机翼作为算例,对螺旋桨滑流气动特性进行计算,将气动分析结果与文献中的CFD分析数据进行对比,验证软件的精度和可靠性。
将其应用于19座通勤类飞机,分别对1—3对电机+桨3种气动布局方案参数化建模,调整螺旋桨的位置、尺寸及性能参数,快速分析飞机以巡航马赫数飞行在不同迎角下的升阻特性。
结果表明:3种方案中六桨方案最优,此方案能显著降低全机诱导阻力,使总升阻比较双桨可提高14.8%,相对于四桨可提高31.9%。
【总页数】4页(P219-222)
【作者】伍庭佳;王宇;李湘;张帅
【作者单位】南京航空航天大学航空学院;中国商用飞机有限责任公司北京民用飞机技术研究中心
【正文语种】中文
【中图分类】V228.5
【相关文献】
1.飞翼气动布局飞机纵向短周期等效系统参数辨识技术研究
2.航天飞机的随控布局研究:航天飞机空气动力学问题之六
3.一种混合动力飞机动力系统试验台架的设
计研究4.氢电-锂电通勤飞机分布式推进系统匹配设计5.混合动力推进系统与飞机数字化设计现状与展望
因版权原因,仅展示原文概要,查看原文内容请购买。
无人机气动结构基础
①螺旋桨
② 电机座 ⑤电池仓支架
⑥起落架
④下中心板
知识点1
机架是多旋翼无人机的机身,是多旋翼无人机其他结构的安装基础,起承载作用。
三旋翼无人机
四旋翼无人机
六旋翼无人机
八旋翼无人机
四轴八旋翼无人机
油动十旋翼无人机
知识点1
机架材质 塑 料 、 玻 璃 纤 维 、 碳 纤 维 、 铝 合 金
机架布局 X 形 、 I 形 、V 形、Y 形 、I Y 形
机架轴距 对 角 线 两 个电动机或 者桨叶中心
的距离,单位为mm。
知识点1
电 池
螺旋桨
动力装置
电调
电 动 机
知识点1
飞控是无人机的大脑,集成了高精度的感应器原件,包括陀螺仪、加速度计、角速度 计、气压计、GPS、指南针和控制电路等。能够稳定无人机飞行姿态,并能控制无人机 自主或半自主飞行。
螺旋桨——产生升力
PART.4
垂直起降固定翼无人机气动结构
知识点1
垂直起降固定翼无人机是一种与多旋翼无人机类似起降方式 或直接推力等方式实现垂直起降,由固定翼飞行方式实现水平 飞行,且垂直起降与水平飞行方式可在空中自由转换的无人机。
总结
• 产生升力的主要部件是??
机翼
螺旋桨
感谢您的倾听
交叉式双旋翼直升机在机身顶部分别对称布置两副旋翼,其桨为两叶 桨,且旋转方向相反。
PART.3
多旋翼无人机气动结构
知识点1
多旋翼无人机又称多轴飞行器,是一种具有三个或三个及以上旋 翼轴的无人驾驶旋翼飞行器。
知识点1
多旋翼无人机主要由机架、动力装置、起落架、机载设备组成。
知识点1
③ 机臂
四旋翼的平衡及方向的控制原理
来源于网络。
今天我们来讨论一下如何调整四轴的4个电机的转速,来使四轴朝4个方向运动起来的。
多旋翼可能有很多轴,或者对称或者不对称。
我们以四轴,X 形状为例。
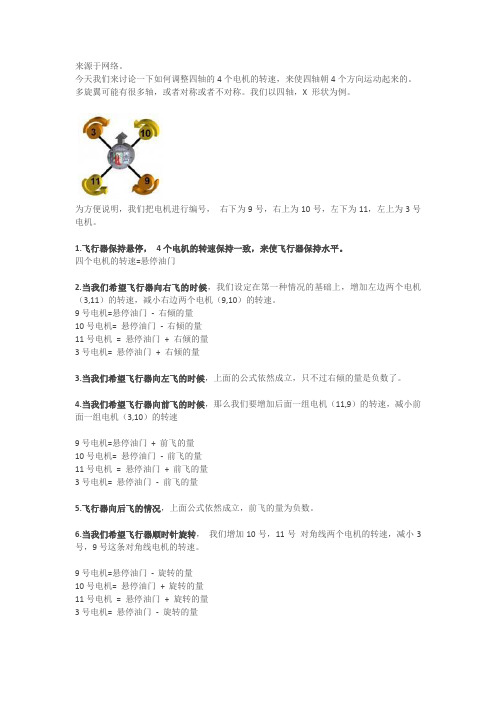
为方便说明,我们把电机进行编号,右下为9号,右上为10号,左下为11,左上为3号电机。
1.飞行器保持悬停,4个电机的转速保持一致,来使飞行器保持水平。
四个电机的转速=悬停油门2.当我们希望飞行器向右飞的时候,我们设定在第一种情况的基础上,增加左边两个电机(3,11)的转速,减小右边两个电机(9,10)的转速。
9号电机=悬停油门- 右倾的量10号电机= 悬停油门- 右倾的量11号电机= 悬停油门+ 右倾的量3号电机= 悬停油门+ 右倾的量3.当我们希望飞行器向左飞的时候,上面的公式依然成立,只不过右倾的量是负数了。
4.当我们希望飞行器向前飞的时候,那么我们要增加后面一组电机(11,9)的转速,减小前面一组电机(3,10)的转速9号电机=悬停油门 + 前飞的量10号电机= 悬停油门- 前飞的量11号电机= 悬停油门+ 前飞的量3号电机= 悬停油门- 前飞的量5.飞行器向后飞的情况,上面公式依然成立,前飞的量为负数。
6.当我们希望飞行器顺时针旋转,我们增加10号,11号对角线两个电机的转速,减小3号,9号这条对角线电机的转速。
9号电机=悬停油门 - 旋转的量10号电机= 悬停油门+ 旋转的量11号电机= 悬停油门+ 旋转的量3号电机= 悬停油门- 旋转的量7.当我们希望飞行器逆时针旋转,我们减小10号,11号对角线两个电机的转速,增加3号,9号这条对角线电机的转速。
继续使用上面的公式。
8. 最后,针对一个电机,它同时要负责前后左右和旋转的情况,那它就叠加了4种情况下的值:9号电机 = 悬停油门- 右倾的量 + 前飞的量 - 旋转的量10号电机= 悬停油门- 右倾的量 - 前飞的量 + 旋转的量11号电机= 悬停油门+ 右倾的量 + 前飞的量 + 旋转的量3号电机 = 悬停油门+ 右倾的量 - 前飞的量 - 旋转的量所以实现代码如下:#define PIDMIX(X,Y,Z) rcCommand[THROTTLE] + axisPID[ROLL]*X + axisPID[PITCH]*Y + YAW_DIRECTION * axisPID[YAW]*Z#ifdef QUADXmotor[0] = PIDMIX(-1,+1,-1); //REAR_Rmotor[1] = PIDMIX(-1,-1,+1); //FRONT_Rmotor[2] = PIDMIX(+1,+1,+1); //REAR_Lmotor[3] = PIDMIX(+1,-1,-1); //FRONT_L#endif一切对称,不对称的多旋翼布局都基于此理论,如果有爱的童鞋,可以补充解释Y3,Y6 ,V 尾的公式。
飞机气动布局简介.

飞机气动布局简介想必很多人对飞机很感兴趣,因为飞机大多是很漂亮的,流线型的机身,舒展的机翼,实现了人类在蓝天翱翔的梦想。
其实飞机外型的美观虽然是人类主动的设计创作,而实质却是受制于空气阻力的被动结果,从某种意义上讲,这种符合人类审美标准的流畅线条其实是空气动力原理的杰作。
大千世界千变万化,飞机也是形态各异,大的、小的、胖的、瘦的,四个翅膀的、两个翅膀的甚至还有一个翅膀的,打个比方,飞机的式样就像宠物狗一样,当真是品种丰富,血统复杂。
俗话说外行看热闹,内行看门道,既然飞机的外观是空气动力原理决定的,那么这么多种飞机的形状在飞机设计中就有个称谓,叫做空气动力布局。
下面我们就逐一介绍一下各种气动布局,当了解到气动布局这个概念后再回过头来看这些飞机,就会发现自己不会再看花眼了,其实全世界的飞机品种再多,也无非就以下这几种气动布局而已。
各种空气动力布局的主要差别就在于机翼位置上的差别,首先介绍一个最常见的布局——常规布局。
这种布局的特点是有主机翼和水平尾翼,大的主机翼在前,小机翼也就是水平尾翼在后,有一个或者两个垂直尾翼。
世界上绝大多数飞机属于这种气动布局,特别是客运、货运大型飞机,几乎全是这种布局,例如波音系列、欧洲的空中客车系列,我国的运七、运八、ARJ21,美国的C130等。
我国的军用飞机中除了歼10猛龙战斗机以外,都是常规气动布局。
常规布局最大的优点是技术成熟,这是航空发展史上最早广泛使用的布局,理论研究已经非常完善,生产技术也成熟而又稳定,同其他气动布局相比各项性能比较均衡,所以目前无论是民用飞机还是军用飞机绝大多数使用这种气动布局。
常规气动布局机型——我国的ARJ21祥凤支线客机常规气动布局机型——我国的FC-1枭龙歼击机常规气动布局机型——我国的歼11B歼击机常规布局中还有一个另类——变后掠翼布局,就是主翼的后掠角度可以改变,高速飞行可以加大后掠角,相当于飞鸟收起翅膀,低速飞行时减小后掠角,展开翅膀。
飞机的常见气动布局

飞机的常见气动布局亲爱的同学们大家好:今天,我想和大家讲一讲,飞机的常见气动布局。
大家知道的都有哪些呢?目前我们所知的可行的飞机的空气动力布局方式有:常规、鸭式、三翼面、变后掠、无尾、飞翼、前掠翼。
这些布局方式各有特色各有长短,我将为大家逐个讲解。
首先是常规,常规布局也就是主翼在前,水平尾翼在后,有一个或两个垂尾的气动布局方式。
使用这种气动布局设计的具有代表性的战斗机有,美国——洛克希德马丁公司:F22猛禽。
俄罗斯——苏霍伊设计局:苏27侧卫。
但其实,我们常见的客货机几乎全是这种设计的。
常规布局的优点是技术成熟,理论研究已经非常完善,生产技术也成熟而又稳定,同其他气动布局相比各项性能比较均衡。
只是由于均衡所以也没有特别出色的地方。
然后是鸭式。
因为当初这种气动布局的飞机飞起来像鸭子,故此得名。
说到鸭式布局,我们就不得不说世界上第一架飞机——莱特兄弟的飞行者一号。
它所使用的布局其实就是鸭式布局。
鸭式布局也是主翼在后面,前面加个小机翼叫做鸭翼。
简单地来看,鸭式布局就是将常规布局中的水平位移移到了主翼前方,但鸭翼与平尾并不是一个概念。
虽然鸭翼也承担着控制俯仰的责任,但除此之外,鸭翼还会产生涡流。
这些涡流吹过主翼会带来强大的增升效果,也就是说,鸭翼能提供额外的升力。
如此,鸭式布局的飞机的短距起降性能更强,因为它们在低速度状况下也能获得较高的升力。
鸭式布局的飞机在高速飞行中有着更高的稳定性,机动性也要比常规布局飞机更加出色。
有时鸭式布局飞机还会在机身的后下方增加两片叫做腹鳍的翼面,以增加大迎角情态下的飞行稳定性,这是因为在大迎角情态下,常规布局的飞机的垂尾还会接触到由主翼和平尾的间隙间吹过的气流,而鸭式布局的飞机的主翼往往会阻断流往垂尾的气流,如此垂尾便不能很好地控制飞机的水平方向稳定,而在机身下方增加的腹鳍则能解决这个问题。
这也是鸭式布局飞机的一个不同之处。
鸭式布局设计的代表战机有:中国成飞歼20,欧洲双风:阵风、台风。
飞行器气动布局的优化与性能评估
飞行器气动布局的优化与性能评估在航空航天领域,飞行器的气动布局设计是决定其性能的关键因素之一。
良好的气动布局能够显著提高飞行器的飞行效率、稳定性和操纵性,从而满足各种任务需求。
本文将探讨飞行器气动布局的优化方法以及性能评估的重要方面。
一、飞行器气动布局的基本概念飞行器的气动布局是指其外形和各部件的相对位置关系,这些设计特征直接影响着飞行器在空气中的流动特性和受力情况。
常见的气动布局类型包括常规布局(如机翼在前、平尾在后)、鸭式布局(前置鸭翼)和无尾布局等。
不同的布局形式具有各自的特点和适用范围。
二、气动布局优化的目标与意义优化飞行器的气动布局旨在实现多个目标。
首先是提高升阻比,这意味着在相同的动力条件下,飞行器能够获得更远的航程或更高的飞行速度。
其次是增强稳定性和操纵性,确保飞行器在各种飞行状态下都能保持可控,并对驾驶员的指令做出准确响应。
此外,降低阻力还可以减少燃油消耗,降低运营成本,并减少对环境的影响。
三、优化方法1、数值模拟随着计算机技术的飞速发展,数值模拟已成为飞行器气动布局优化的重要手段。
通过建立飞行器的数学模型,并利用计算流体力学(CFD)软件求解流场方程,可以预测飞行器在不同工况下的气动性能。
在此基础上,通过改变几何参数进行大量的模拟计算,寻找最优的设计方案。
2、风洞试验风洞试验是一种传统而可靠的方法。
将按比例缩小的飞行器模型放置在风洞中,通过测量模型表面的压力分布、气动力等参数,直接获取气动性能数据。
风洞试验能够提供真实的气流环境,但成本较高,且试验周期较长。
3、优化算法在优化过程中,常常采用各种优化算法,如遗传算法、粒子群优化算法等。
这些算法能够自动搜索设计空间,找到最优的参数组合,提高优化效率。
四、性能评估指标1、升力与阻力升力是支持飞行器在空中飞行的力量,阻力则是阻碍其前进的力量。
升阻比(升力与阻力的比值)是衡量气动性能的重要指标,越高越好。
2、稳定性包括纵向稳定性(俯仰方向)、横向稳定性(滚转方向)和方向稳定性(偏航方向)。
微型四旋翼气动布局

微型四旋翼气动布局摘要为研究不同旋翼间距对微型四旋翼飞行器气动性能的影响,通过仿真实验和数值模拟,分析了不同旋翼间距下微型四旋翼飞行器最大飞行速度和升阻比的变化规律。
基于软件对不同翼型的螺旋桨进行建模,并对四组不同桨叶在相同设置下的气动分析,最终选用D型旋翼结构模型作为四旋翼中心轴线间距对气动特性影响分析的理论模型。
在四旋翼机械结构的气动分析中,得到了四组不同间距下四旋翼的压力、速度分布情况,进而对四旋翼飞行器在不同旋翼间距下表现出的不同气动特性进行对比。
研究结果表明:D翼型的旋翼对于本研究中的四旋翼旋叶的气动性能有明显的优势,并且在旋翼间距为300mm时,四旋翼飞行器最大速度为155.485m/s,升阻比达到了4.23,具有良好的气动特性,是本论文研究范围内微型四旋翼系统的最佳气动布局。
关键词:四旋翼飞行器;气动布局;空气动力学;低雷诺数;CFD1.引言微型四旋翼飞行器是利用无线电遥控设备和自备程序控制装置操纵的不载人飞机,或由车载计算机完全或间歇地自主操作。
近些年关于四旋翼间的气流干扰问题在国内外关注度均较低,且国内外相关文献研究主要集中在四旋翼飞行器的姿态和轨迹控制方面。
文献[[1]]对四旋翼的旋翼与机身相互作用进行数值研究,对四旋翼飞行器进行悬停和前飞的数值模拟试验,发现悬停时旋翼间相互作用引起的入流比单个旋翼高,但没有得到直观的流场分布规律;文献[[2]]通过风洞试验研究四旋翼在均匀流场的气动特性,发现前飞时由于前旋翼对后旋翼的干涉作用,导致后旋翼升力系数明显降低。
本论文主要研究微型四旋翼飞行器的四旋翼结构设计和气动性能分析,首先对单个桨叶进行建模及气动性能分析,分析数据得出最优桨叶,完成桨叶选型工作。
采用SolidWorks软件建模技术,建立不同间距下四旋翼的机械结构模型。
采用网格划分方法,获取四旋翼在流场运动时的三维网格,使四旋翼在AnsysFluent软件中实现旋转仿真,在进口流速一定的情况下,分析出不同间距下四旋翼模型的相对压力、最大速度及升阻比,进而研究不同间距下四旋翼的气动性能,并将结果进行分析比较。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力和力矩的方向
面对面 背对背
方法1
对角线上的两根机臂(侧面投影)
电机
旋翼
旋翼
电机
机臂
机臂
2、利用柔性材料改造机架
天津大学实验
最好
PS: 气囊厚度很重要
4mm
方法2
椴木层板
贝雷片
木棍
铝座
蒙皮
Hale Waihona Puke 惯性力和粘性力的比值改善四轴气动特性的办法 算法角度(飞控)
相对比较成功
较难
气动布局角度
通过改变轴的形状,电机位置,气道方向等方式,降低 空气粘性的影响。
柔性机架
在机架中加入柔性材料,利用弹性形变来抵消阵风或突 变气流的影响。
扑翼式飞行器
二、改善四轴气动性能的想法
1、改变气道方向(改变发动机角度)
一、常规尺寸四轴和微型四轴
常规尺寸四轴
微型四轴
特点:
尺寸不超过150mm 重10~100g 续航20~60min 速度30~60km/h
微型四轴的气动特性
尺寸小 质量小 惯性小 速度慢 雷诺数低
抗风型差
雷诺数
一种可用来表征流体流动情况的无量纲数
Re=ρvd^2/μ
微型四轴Re:103~104