多孔板抓取机械手结构设计
工业机器人手部三指抓取的结构设计

工业机器人手部三指抓取的结构设计机械设计及其自动化学生指导教师【摘要】:随着工业的大规模的发展,越来越多工业机器人操作手应用于各个场所并逐渐受到各国开发者关注和重视。
而最后执行者作为机器人于环境互相作用的机械指已经被提到了新的高度,文中简要介绍机械抓取机构的概念,机械抓取机构的组成与分类国内外的发展状况及发展前景。
调研现有工业机器抓取机构工作原理和结构设计提出工业机器人三指抓取机构的结构原理,然后将任务要求和对象物体的几何物理特性以及环境信息综合起来考虑,经过分析建立于东学的模型,仿真各个手指在抓取时的运动姿态,同时完成分析在静平衡状态下手指和外界环境之间的作用力。
并将抓取的姿态推理出来,同时寻找抓取物体特征平面,确定出所需要抓取的平面,再在抓取的平面上进一步规划出三个抓取点,并最终完成抓取结构设计。
【关键词】工业机器人三指抓取机构结构设计Industrial robot manipulators three fingers grab theinstitutional structure design【Abstract】With the large-scale industrial development, more and more industrial robot manipulators used in various places, and gradually by the concern and attention of the Inter-developer. Mechanical means as robots interact with the environment the final implementation, has been referred to a new level. The paper briefly introduces the mechanical grab the concept of the composition and classification of mechanical grab institutions, the industrial robot refers to crawl the principle of the structure. And comprehensive task requirements and object geometrical physical characteristics, and environmental information into consideration to establish the kinematics of the model through the analysis, simulation of individual fingers crawl athletic stance, and finger to complete the analysis in the static equilibrium state and the external environment between the forces. Attitude reasoning and crawl out and grab objects by looking for characteristic plane, identified the need to capture the plane 3 crawl further planning, and then grab the plane, and the final completion of the crawl structure design.【Key words】Industrial robots Three fingers grab the institutional Structure design目录绪论.........................................................1.前言1.1机械手概述...............................................1.2机械手的组成和分类.......................................1.2.1机械手的组成.......................................1.2.2机械手的分类.......................................2.机械手的设计方案2.1机械手的坐标型式与自由度.............................. 2.2机械手的手部结构方案设计.............................. 2.3机械手的手臂结构方案设计.............................. 2.4机械手的手臂结构方案设计............................... 2.5机械手的驱动方案设计................................... 2.6机械手的控制方案设计................................... 2.7机械手的主要参数.......................................2.8机械手的技术参数列表...................................3.手部结构设计3.1夹持式手部结构......................................... 3.1.1手指的形状和分类................................. 3.1.2设计时考虑的几个问题.............................3.1.3动力设计...............................4.手臂伸缩的尺寸设计与校核4.1手臂伸缩结构的尺寸设计与校核....................... 4.1.1手臂尺寸.............................................. 4.2 尺寸校核.............................................4.3 尺寸校核.............................................5.结论.................................................致谢......................................................参考文献...................................................专业相关的资料.............................................绪论1.前言1.1机械手概述:机械手是可以模仿人手和臂的某些动作和功能的,常常用在按固定顺序抓取、搬运物件或操作难度大的工具的自动操作装置。
五自由度机械手的抓取设计

五自由度机械手的抓取设计随着工业自动化的快速发展,机器人技术也在不断进步,其中五自由度机械手作为机器人的重要组成部分,具有广泛的应用前景。
本文将围绕五自由度机械手的抓取设计展开讨论,旨在深入探讨其工作原理、设计方法及应用案例。
五自由度机械手、抓取设计、自由度、机械手机构、运动学、应用案例五自由度机械手是一种具有五个独立运动自由度的机器人手臂。
这五个自由度包括三个线性移动自由度和两个旋转自由度。
这种机械手能够在三维空间中完成各种复杂的动作,如抓取、搬运、装配等。
抓取设计是五自由度机械手的关键技术之一,通过对机械手爪部进行精确的定位和姿态调整,实现物体的稳定抓取和操作。
五自由度机械手主要由基座、臂部、手部和驱动器等部分组成。
其中,手部是进行抓取操作的关键部件,它通常包括一个或多个手指,以及相应的关节和驱动器。
手指的形状和大小应根据抓取物体的形状和大小进行设计,以确保良好的适应性。
机械臂的每个自由度都由一个电机驱动,通过控制器实现对机械手的位置、姿态和动作的精确控制。
五自由度机械手的五个自由度分别为三条臂的直线移动和两条臂的旋转运动。
通过这五个自由度的协调动作,机械手可以实现空间中的任意位置和姿态。
在抓取设计中,需要根据实际应用需求,对机械手的运动进行规划,以实现物体的稳定抓取和操作。
抓取设计还需要考虑手指与物体的接触方式。
这通常包括面接触、点接触和侧面接触等。
面接触适用于抓取表面较大的物体,可以提供较好的稳定性;点接触适用于抓取表面较小的物体;侧面接触则适用于抓取有一定长度的物体,可以通过多个手指的协同动作实现稳定抓取。
五自由度机械手的抓取设计具有许多优点。
它具有较高的灵活性和适应性,可以抓取各种形状和大小的物体。
五个自由度的设计使得机械手可以到达空间中的任意位置和姿态,实现了更大的操作空间。
通过精确的控制系统和运动规划,机械手可以实现精确的定位和稳定的操作。
然而,五自由度机械手的抓取设计也存在一些缺点。
五自由度机械手的抓取设计
五自由度机械手的抓取设计一、本文概述随着现代工业自动化程度的不断提高,机械手作为实现自动化生产的关键设备之一,其设计和应用日益受到重视。
其中,五自由度机械手因其灵活的操作能力和广泛的适用范围,成为了研究和应用的热点。
本文旨在探讨五自由度机械手的抓取设计,包括其结构特点、抓取策略、运动规划与控制等方面,以期为实现高效、精确的抓取操作提供理论支持和实践指导。
本文将简要介绍五自由度机械手的基本结构和运动特点,包括其各个关节的转动范围和自由度分配,为后续的设计和分析奠定基础。
本文将重点分析五自由度机械手的抓取策略,包括抓取力的计算、抓取姿态的确定以及抓取过程中的稳定性分析等内容。
在此基础上,本文将探讨五自由度机械手的运动规划与控制方法,包括路径规划、速度控制、力位混合控制等方面,以实现快速、准确的抓取操作。
本文将通过实例分析,展示五自由度机械手在实际应用中的抓取效果,并总结其设计要点和注意事项。
本文的研究成果将为五自由度机械手的设计和应用提供有益的参考和借鉴,同时也为相关领域的研究和发展提供新的思路和方法。
二、五自由度机械手的抓取设计原理五自由度机械手的抓取设计主要基于机械臂的运动学和动力学原理,以及物体的形状、尺寸和重量等特性。
通过合理的设计,五自由度机械手可以实现精准、稳定、高效的抓取操作。
五自由度机械手的运动学设计是关键。
运动学主要研究物体的运动规律,而不考虑引起这些运动的力和力矩。
在五自由度机械手的抓取设计中,我们需要根据目标物体的位置和姿态,通过运动学计算,确定机械手的各个关节角度,使机械手的末端执行器能够准确地到达并适应物体的形状和尺寸。
动力学设计也是必不可少的。
动力学主要研究物体的运动状态和引起这些状态的力和力矩。
在抓取过程中,五自由度机械手需要克服物体的重力和摩擦力等外部力,因此,我们需要通过动力学计算,确定适当的关节力矩,以保证机械手能够稳定地抓取物体。
抓取设计还需要考虑物体的形状、尺寸和重量等特性。
管道机器人抓取机械手设计说明书

管道机器人抓取机械手设计说明书一、引言管道机器人是一种用于对管道进行检测、维修和清洁的自动化装置。
在管道维护和清洁过程中,机械手是其关键组成部分之一。
本文将详细介绍管道机器人抓取机械手的设计说明书,包括设计原理、结构组成、工作原理和性能指标等方面。
二、设计原理管道机器人抓取机械手的设计原理是基于机器人技术和物理学原理。
通过机械手的抓取装置,可以实现对管道内部的物体进行抓取、搬运和移动。
设计中考虑了机械手的力学性能、运动学特性和操作灵活性,以满足不同管道环境下的需求。
三、结构组成管道机器人抓取机械手主要由机械臂、抓取器、传动装置和控制系统等组成。
机械臂是机械手的主体部分,通过关节和连接杆件实现多自由度的运动。
抓取器是机械手的末端装置,用于抓取和释放物体。
传动装置包括电机、减速器和传动链条等,用于驱动机械手的运动。
控制系统负责对机械手进行控制和监测。
四、工作原理管道机器人抓取机械手的工作原理是通过控制系统发送指令,驱动机械臂的关节进行运动。
机械臂的运动可以通过电机和传动装置实现。
当机械臂到达目标位置时,抓取器会进行抓取或释放操作。
通过精确的控制和监测,机械手可以准确地抓取管道内的物体,并按照要求进行搬运和移动。
五、性能指标管道机器人抓取机械手的性能指标主要包括抓取力、抓取范围、定位精度和工作速度等。
抓取力是机械手抓取物体的最大力量,需要根据具体应用场景进行设计和计算。
抓取范围是机械手可以抓取物体的最大尺寸范围,需要根据管道内部的空间限制进行设计。
定位精度是机械手移动和抓取的准确度,需要考虑机械臂的运动学和传动装置的精度。
工作速度是机械手完成任务的时间,需要根据实际需求进行优化。
六、应用场景管道机器人抓取机械手广泛应用于各类管道维护、检测和清洁任务中。
例如,可以用于清洗石油管道内的沉积物,抓取堵塞管道内的异物,检测管道内的裂缝和损坏等。
由于机器人具有自主性和灵活性,可以适应不同管道环境的需求,提高工作效率和安全性。
多关节抓取灵巧手设计
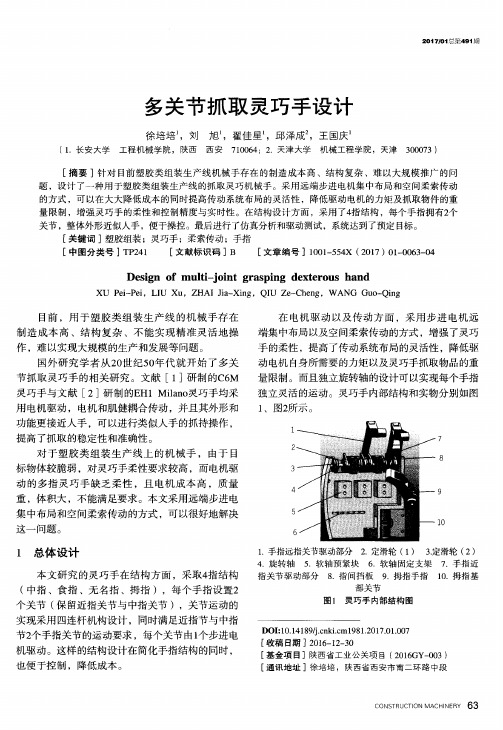
机驱动。这样的结构设计在简化手指结构的同时 ,
也便 于控 制 ,降低 成本 。
[ 收稿 日期 ] 2 0 1 6 — 1 2 — 3 0 [ 基金项 目 ]陕西省工业公关项 目 ( 2 0 1 6 GY 一 0 0 3)
[ 通讯地址 ]徐培 培 ,陕西省西 安市南 二环路 中段
C O N S T R U C T I O N M A C H I N E R Y 6 3
A 上 ,分 别 受驱 动 力矩M. 、 绕 同定 支架转 动 ,为 摆动副。 杆 件 为一 个 三副 构 件 , 与C 拥 有 相 同 的 长度, 此a 杆件 转动 的角 度 会等效 地 引起晰 件 的
转 动 。c 杆 件 与 同定 支架 的转 动 关系 代表 手 指 的 近
在 电机驱动 以及传动方 面 ,采用 步进 电机远
端集 中布 局 以及 空 间柔 索传 动 的方 式 ,增强 了灵 巧
手的柔性 ,提高了传动系统布局的灵活性 ,降低驱
动 电机 自身所需 要 的力矩 以及 灵巧 手抓 取物 品 的重 量 限制 。而且独 立旋 转轴 的设 计可 以实现每个 手 指 独 立灵 活 的运动 。灵 巧手 内部 结构 和实 物分别 如 图
指 节 ,当c 杆件 受 驱 动力 矩M, 驱 动时 ,会 引起 整 个
图 2 灵 巧 手 实 物 设 计 图
手 指 向 内转 动 。 杆 件 与 固定 支架A的转 动 关 系代 表 手指 的 中指 节 , Na 受 驱 动 力矩M, 的驱 动 时 ,会
2 机 械 结构 设 计
2 . 1 拇 指部 分设 计
De s i g n o f mu l t i - j o i n t g r a s p i n g d e x t e r o u s h a n d
抓取式机械手臂设计汪臻凯
抓取式机械手臂设计汪臻凯发布时间:2021-10-27T04:16:44.237Z 来源:《电力设备》2021年第8期作者:汪臻凯刘青松陈镇康瞿荣光汤诺为[导读] 在这个智能工业快速发展,科学技术不断创新的时代,我们身边越来越多的人工操作已被机械操作所取代。
机械手臂是机械人领域不可或缺的一部分,它能模仿人类或动物的某些动作来代替人类完成一些繁重的或突破人类极限的劳动,提高了人类生产生活的品质。
本文基于PLC技术介绍了机械手臂的一些结构组成和原理。
汪臻凯刘青松陈镇康瞿荣光汤诺为(嘉兴南湖学院浙江嘉兴)摘要:在这个智能工业快速发展,科学技术不断创新的时代,我们身边越来越多的人工操作已被机械操作所取代。
机械手臂是机械人领域不可或缺的一部分,它能模仿人类或动物的某些动作来代替人类完成一些繁重的或突破人类极限的劳动,提高了人类生产生活的品质。
本文基于PLC技术介绍了机械手臂的一些结构组成和原理。
关键字:机械手臂,Plc控制1.引言:机械手臂作为机械人领域不可或缺的一部分,机械手臂的更高精度,高强度,轻便一直是智能化发展的热点之一。
本文主要对关节设计,肩部、肘部关节设计,手腕结构设计,手臂结构设计手部结构设计等进行介绍分析。
并且通过PLC进行控制运行。
PLC是应用单片机构成的比较成熟的控制系统,是已经调试成熟稳定的单片机应用系统的产品,它具有成本低廉经济实用等特点,并且具有较强的通用性,稳定性和高可靠性。
2.硬件结构:机械臂在当今社会工业生产中应用广泛,一般由底座,回转单元,大臂,小臂等组成,而回转单位在下文设计中细分为肘关节,肩关节,手腕结构,手部结构,手臂结构。
机械臂的应用极大的提高了生产效率,降低了生产成本,加快了科技的发展。
2.1机械臂底座设计底座是支撑整个机器臂基的部分,底座下端固定在工作平面上,使机器人工作是存在合适的位置,,提高工作效率,为机器臂的工作提供了安全保障。
通过比较各种类型的管装结构以及其数据,最后发现圆形管的结构最为牢固,安全,受力更加均匀,更容易满足用户的使用需求和安全保障。
采摘机器人机械手结构设计与分析
采摘机器人机械手结构设计与分析一、本文概述1、采摘机器人的研究背景和意义随着农业技术的快速发展和人口老龄化的加剧,传统的人工采摘方式已经难以满足现代农业生产的需求。
采摘机器人作为一种新型的农业机械设备,具有高效、精准、省时省力等优点,正逐渐成为农业领域的研究热点。
采摘机器人的研究和应用,不仅可以提高农作物的采摘效率和质量,降低人工成本,还可以改善农民的工作环境和条件,推动农业现代化的进程。
机械手作为采摘机器人的核心部件,其结构设计直接影响到采摘机器人的性能和稳定性。
因此,对采摘机器人机械手结构的设计与分析显得尤为重要。
通过对采摘机器人机械手结构的研究,可以深入了解其运动特性、受力情况和优化方案,从而提高采摘机器人的采摘效率和准确性,推动采摘机器人在农业生产中的广泛应用。
这也为农业机械化、智能化和自动化的发展提供了重要的技术支撑和理论基础。
研究采摘机器人机械手结构设计与分析具有重要的理论意义和实践价值,对于推动农业现代化和提高农业生产效益具有重要意义。
2、机械手在采摘机器人中的重要作用在采摘机器人中,机械手的作用至关重要。
作为采摘机器人的核心部件之一,机械手负责直接与目标农作物进行交互,完成识别、抓取、剪切和放置等一系列复杂动作。
这些动作的成功执行,直接决定了采摘机器人的工作效率、采摘质量和适应性。
机械手的设计直接决定了采摘机器人的工作能力。
通过合理的结构设计,机械手可以适应不同形状、大小和成熟度的农作物,实现精准、高效的采摘。
机械手的运动轨迹和速度控制也是影响采摘效率的关键因素。
因此,对机械手的精确控制是实现高效采摘的关键。
机械手的性能直接影响到采摘机器人的采摘质量。
在采摘过程中,机械手需要保持稳定的抓取力度,避免对农作物造成损伤。
同时,机械手还需要具备足够的灵活性和精度,以确保能够准确地将农作物采摘下来。
这些要求都对机械手的设计和制造提出了极高的挑战。
机械手的适应性也是采摘机器人性能的重要评价指标。
多用途抓取类机械手设计及分析
在人们的社会活动和生产生活当中,多用途抓取类机械手发挥了较大的作用,能够帮助人们在危险的环境中进行各种操作,目前抓取类机械手在工业生产中也有较大的发挥。
为了进一步提高抓取类机械手的工作效果,需要在对不同种类机械手的整体特点和结构进行分析的基础上,在机械手端部采取电磁铁进行吸附连接,以此来实现多种机械手之间的灵活转换,形成多用途抓取类机械手,并且在机械手部分加上压力传感器和远程控制系统,以此来对物品的硬度进行判断,从而选择更加合适的传动方式和驱动方式。
1 多用途抓取类机械手的仿真1.1 建模仿真目前常见的多用途抓取类机械手主要包括吸盘式、两爪式和三爪式等类型,分别在不同场合中进行工作,在对这些多用途抓取类机械手进行仿真建模的过程中,其主要包括液压系统、机械系统、控制系统和动力系统。
机械系统是多功能机械手完成各项动作的执行结构,通常包括机械手抓、前臂、支架和底座等工作装置,在对机械系统进行建模的过程中,需要对不同的结构配件执行最基本的建模命令,形成相应的机械结构部件。
然后根据机械部件类型的不同,将机械系统中的机械部件进行相互连接,主要包括机械手底座与后臂之间的连接,前臂孔和后臂孔之间的连接,在机械系统连接完成之后,对液压装置进行装配,形成完整的机械手模型[1]。
1.2 对重要元件进行选择为了保证多用途抓取类机械手能够在不同的环境场合中进行工作,同时在最大程度上提高机械手的抓取效果,需要对其中的重要元件进行选择。
这些重要元件主要包括这样几个部分:首先是压力传感器,压力传感器主要安装在机械手指之间,在机械手进行抓取动作的过程中,压力传感器能够在对物体的硬度进行判断的基础上,对所施加的压力进行控制,保证机械手能够顺利地夹取不同硬度的物体,在压力传感器的选择上,可以选择薄片式电阻式应变片来进行使用。
另外一种重要元件为PIC 控制系统,根据实际情况来对P LC 控制系统设定参考压力值,在输入压力和参考压力值进行比较之后,对电动机的输出功率进行调节,以此来对机械手爪的输出动力进行控制,方便机械手爪抓取各种不同硬度的物体,对于PLC控制器的选择,可以使用三菱FX1S-14M T-E S S/U L 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多孔板抓取机械手的机械结构设计系别:机电与自动化学院专业班:机械电子工程1104班姓名:罗雄学号:20111100139指导教师:王姣2015年5月多孔板抓取机械手的机械结构设计Porous plate fetching manipulator structure design摘要本文以实际项目“细菌鉴定与培养”为背景,设计多孔板抓取机械手,是机械手具有抓取、移动多孔板的功能,能够在细菌实验中完成任务要求,实现实验过程的自动化,从而改善工作人员的工作环境和减轻工作强度,提高了实验结果的效率和精度。
本文分析了多孔板抓取机械手的工作任务以及运动方式,设计出了多孔板抓取机械手的机械结构,完成了机械手的驱动系统和传动系统的选型,根据机械手最大转矩选出了驱动电机类型以及联轴器的类型,根据机械手的运动方式,选出传动系统中的滚珠丝杠的类型。
然后,根据细菌培养多孔板的结构形式,设计了合适的机械手末端执行器。
完成了机械手的总装配图绘制,使用ug对机械手进行了三维建模,并导出工程图。
本论文完成了细菌实验过程中多孔板抓取机械手的初步研究,为整个实验奠定了重要基础,具有一定的应用价值。
关键词:机械手,细菌实验,结构设计AbstractThe to the actual project "identification of bacteria and culture" as the background, design of porous plate manipulator is mechanical hand is grasping, moving porous p--late, can in the experimental bacteria complete mission requirements, realize autom--ation of the experiment process, so as to improve the staff working environment and reduce the work intensity, improve the efficiency and accuracy of the experimental results.This paper analyzes the porous plate manipulator and motion design the mechanical structure of the porous plate manipulator, completed the manipulator drive system and drive system of selection, according to the manipulator maximum torque elected drive motor type and type of shaft coupling device, according to the movement of the mani- -pulator, elected the type of ball screw drive system. Then, according to the structure of the porous plate, a suitable manipulator is designed.. The total assembly drawing of the manipulator was completed, and the 3D model of the manipulator was modeled by ug, and the engineering chart was deduced..In this thesis, the preliminary study of the porous plate grasping manipulator is accomplished, which lays the important foundation for the whole experiment, and has some application value.Key word:manipulator ,bacteria ,the structure design目录摘要 (I)Abstract (II)第一章绪论 (1)1.1机械手的现状及发展趋势 (1)1.2机械手的应用 (2)1.3课题的选取及主要的工作 (3)1.3.1 课题的目的和意义 (3)1.3.2 课题的主要工作 (4)第二章多孔板抓取机械手的总体结构设计 (5)2.1 整体方案的确定 (7)2.1.1 多孔板抓取机械手基本参数的确定 (7)2.1.2 驱动方式的选择 (9)2.1.3 传动方式的选择 (10)2.1.4 整体结构的设计 (11)2.2 结构的设计及选型 (12)2.2.1 支架部分结构设计 (12)2.2.2 手臂的设计 (13)2.2.3 驱动电机的选型 (14)2.2.4 联轴器的选型 (18)2.3 多孔板抓取机械手总体效果 (21)2.4 本章小结 (21)第三章末端执行器的结构设计 (22)3.1 末端执行器介绍 (22)3.2 末端执行器的选型 (23)3.2.1 夹持器末端执行器选型的基本要求 (24)3.2.2 末端执行器结构 (25)3.3 夹紧装置 (26)3.3.1 夹紧装置的分类 (27)3.4 本章小结 (27)致谢 (28)参考文献 (29)第一章绪论1.1机械手的现状及发展趋势机械手是一种能够模仿人手和手臂的某些功能的自动化机械,机械手有执行末端、机械手臂、驱动系统以及传动系统等组成,机械手的执行末端用来完成抓取等作业任务,机械手臂的主要功能是完成机械手到达指定位置的移动或转动,驱动系统主要为机械手的移动或执行末端的抓取动作提供动力,传动系统抓药是用来传递驱动系统传递的动力给执行末端,工业机械手的种类有很多类型,按驱动方式分可分为液压驱动机械手、气压驱动机械手、电机驱动机械手等;按照运动坐标类型可分为直角坐标型机械手、球坐标型机械手、球坐标机械手等,按照通用范围可分为通用机械手和专用机械手。
机械手可以按照认为输入的程序完成一系列的指定动作,如抓取货物、搬运物件、焊接等任务,由于机械手的这些功能,机械手可以代替人从事单调、危险、繁重以及简单重复的体力劳动,机械手已被应用于各行各业,实现了工业生产及其它产业的生产自动化过程。
机械手可以实现工业生产过程的自动化,改善人们的工作环境,改善人们的生活方式,机械手在社会生产生活中扮演越来越重要的角色,机械手的动作的准确性、对环境的雾污染性、以及机械手的自动化性能等等变得越来越重要,为了将来机械手更好的应用于社会的生产生活,机械手到达指定位置以及重复到达指定位置的精确程度,这些将会是机械手发展的方向,为了机械手能够更好地应用于生产生活,为了适应精密行业的无污染要求,机械手要实现无给油化,为了适应行业的自动化要求,机械手要实现机电一体化的要求。
以上这些都将是机械手未来的发展趋势及方向。
1.2机械手的应用手虽然目前还不是很灵活,但它具有能不断重复相同的动作、不知疲倦、不俱危险、抓取力量比人手大机械等特点,可以实现生产的自动化和机械化,因此,机械手已经受到许多部门的重视,并越来越广泛的得到了应用。
例如,机床加工工件的装卸,特别是在自动化车床、组合机床上的使用较为普遍;在装配作业中应用广泛,在电子行业中它可以用来装配印制电路板,在机械行业中它可以用来组装零部件,以代替人的劳动;它可以在危险的场合下工作,如军用品的装卸、危险品及有害物质的搬运等;还可用于宇宙机海洋的开发及军事工程和生物医学方面的研究和实验等。
机械手的组成部分主要有运动机构和手部。
其中手部是用来对目标工件进行抓取的一种部件,它的结构形式与被抓持物件的形状、尺寸、重量、工作要求和材料性能有关,可分为托吃型、吸附性和夹持型等。
运动机构可以改变被抓持物件的姿势和位置,它通过使手部完成各种移动、转动或复合运动来完成规定的动作。
在整个空间内为了使机械手能够抓取空间中任意位置的物体,需有6个自由度。
自动化的机械手装置主要由驱动机构、传送机构、抓取机构、控制机构和传感装置、行程检测装置等部分组成。
它们之间的相互关系如图 1.1所示。
抓取机构主要对工件进行抓取和放置,传送机构主要改变工件的方向和位置,驱动部分主要为传送和抓取机构提供动力,行程监测装置主要对机械手各运动进行检测和制,控制部分主要控制工件动作的顺序、位置和时间等,传感装置主要用于检测抓取机构与工件接触情况以及检测工件是否抓稳等。
机械手自 20 世纪 60 年代初期产生以来,历经了近五十年发展,现在已经发展成为了机械制造业生产自动化中十分重要的一种机电设备,并且机械手的种类也在逐渐增加,应用领域也变得越来越广泛。
1.3课题的选取及主要的工作1.3.1 课题的目的和意义现在,医学微生物临床实验的自动化程度越来越高,应用于医学微生物临床实验的机械手的发展也越来越受到世人的关注,在当今人们对卫生健康安全的要求越来高,它为人们的生命和生活提供了一层重要的保障。
它是自动化技术下的产物,与传统手工进行微生物培养与鉴定比,具有以下的优势(1)缩短了检测周期;(2)准确率;(3)降低了试验劳动强度;(4)促进了生活水平发展等。
虽然,应用于医学微生物临床培养、鉴定的机械手具有许多优势,但它的投入及生产成本非常昂贵,对于国内一些小型医药生物公司及医疗场所,它们根本无力购买这种比较先进设备,这就极大影响到了自动微生物机械手的推广,所以在国内微生物自动化培养程度相对不高,国外设备价格昂贵的情况下,极其有必要对多孔板抓取机械手的一些关键技术进行研究改进。
在细菌的培养、鉴定等临床实验过程中,细菌培养板作为陈放细菌菌液的装置设备,它从指定位置到恒温孵箱的自动化,是细菌培养鉴定临床实验过程中一个很重要的过程。
在国内一些半自动的细菌培养、细菌鉴定仪中,有许多的设备依然用手工的方法对细菌培养板进行加样和进行指定位置的移取,这样不仅很大程度降低了工作效率,浪费了大量的资源、人力,同时也可能导致操作过程中细菌的污染,给培养、鉴定结果带来影响,造成巨大的失,所以对细菌培养多孔板的自动化移取的研究具有很高的实际应用值。
本课题根据给定细菌培养多孔板,设计出了一套用于抓取细菌培养多孔板的可实现自动化的机械手装置。
从而使全自动细菌培养、鉴定仪能够大众化,更好的推动人们健康生活水平的发展。
1.3.2 课题的主要工作细菌培养多孔板抓取机械手,在本文中简称为多孔板抓取机械手,它是抓取细菌培养板到达指定位置的一种自动化机械设备。