CAN通信网络拓扑图和设计方案
CAN总线工程布线安装规范

CAN总线工程布线规范
1.CAN总线简介
CAN总线采用一对差分电缆作为传输介质,所有节点均直接连接到这一对公共传输介质上并行排列,接收或发送数据信息。
在总线两端,分别加入终端电阻予以终结,以防止节点在网络上发送的信号在到达电缆末端时反射,常见的CAN总线网络拓扑结构如图1所示。
图1 CAN总线网络拓扑结构
2. 理论安装布线
理论安装布线示意图如图2所示。
监控器和监控主机上均有对应的通讯端口CANH和CANL,工程布线安装时,从监控主机引出通讯线,所有监控器挂接到这两根通讯线缆上,通讯线最远端连接120Ω终端电阻。
CANH和CANL有极性之分,不可接反。
图2 理论安装布线示意图
注意,监控主机内部包含120Ω终端电阻,所以正常连接后,两根总线间阻值为60Ω左右,从主机端断开信号线,线间电阻为120Ω,通过测量阻值即可判别布线安装是否正确。
3.特殊分支布线
工程布线时,推荐按照理论安装方式布线,可保证通讯稳定性最佳,但实际应用时可能布线比较繁琐,增加成本。
如CAD图3所示,工程包含三栋建筑,每栋建筑六层,每层三个节点。
右下角为监控主机,通讯线首先分支进入最近的A栋建筑,而后分支进入B栋建筑,最后主干线进入最远的C栋建筑,每层亦可分支连接各个监控器,主干线在C栋建筑顶层最远的监控器处终结,连接120欧电阻盒。
工程若只有一栋建筑,可参照C栋连接方式布线。
注意,特殊分支布线方式通讯易不稳定,所以应尽量少用,且分支线越短越好,连接的节点越少越好。
如果某栋建筑的某一层有很多节点,最好采用理论安装方式布线,其他层节点较少,则可使用特殊分支方式布线。
图3 特殊分支布线。
基于FPGA的CAN总线星形拓扑结构设计

FPGA (现场可编程门阵列 , field p rogramm able gate array)是在 PAL、GAL、EPLD 等可编程器件的基础上进 一步发展的产物 。其经过几十年的发展 ,集成度越来 越高 ,功能也日渐强大 。 FPGA 具有非常丰富的触发 器 、存储器资源以及 I/O 资源 ,利用这些资源可以将其 配置成各种控制逻辑 。将 FPGA 用于实现 CAN 总线 星形拓扑结构的核心节点 ,可以有效地提高系统集成 度和处理速度 ,从而保证系统的可靠性 、稳定性 。
CAN-bus拓扑结构详解

Node 2
Node n
R
R
致远电子
传递价值 成就你我
http://www.embedcontrol. com
网络长度参数
CAN-bus 位速率:1Mbps
总线长度:最大40m 支线长度:最大0.3m 节点距离:最大40m
CAN-bus 位速率:5Kbps
总线长度:最大10Km 支线长度:最大6m 节点距离:最大10Km
CAN-bus国际标准 ISO 11898
ISO 11898-1/2/3 ISO 11898-4
注意:
CAN-bus 底层协议只定义物理层、数据链路层。 CAN 2.0规范、国际标准ISO 11898是设计CAN应用系统的基本依据。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑的扩展(二)
多条分支网络通过集线器(HUB)连接到干线 每个分支网络符合ISO 11898标准
CAN-bus CANhub 集线器
- Acceptance Filtering - Overload Notification - Recover Management
http://www.embedcontrol. com
CAN节点与总线连接
CAN节点通过支线连接到总线
CAN-bus总线现场布线和接口设计及电缆和连接器选择
等长 星型连接 2.2.1 “ ”
............................................................................................. 8
使用 总线插入式光电适配器的连接 2.2.2
CAN
..................................................... 9
引言 7.1
...................................................................................................................... 23
产品简介 7.2
............................................................................................................... 23
连接器 6.3 OPEN5
...................................................................................................... 21
附录 总线物理 逻辑分析和测量的新标准 7.
A CAN
&
....................................................... 23
三通布线 3.2
............................................................................................................... 10
CAN控制器局域网总线协议详解拓扑图错误状态种类

一提到总线,就很容易让我们联想到错综复杂的计算机电线,可是这些总线总能起着十分重要的作用,今天我们就来认识下CAN 总线协议。
CAN 控制器局域网总线是一种实施应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。
最常用的领域是汽车。
CAN 协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配线线束。
【特点】1.CAN 是目前位置唯一有国际标准的现场总线2.CAN 为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而且部分主从3.在报文标识符上,CAN 上的节点分成不同的优先级,可满足不同的实时要求4.CAN 采用非破坏总线仲裁技术5.CAN 节点只需通过对报文的标识符滤波即可实现点对点、一点对多点及全局广播几种方式接收数据6.CAN 上的节点数主要取决于总线驱动电路7.报文采用短帧结构,传输时间段,受干扰概率低,数据出错率极低8.CAN 的每帧信息都有CRC 校验及其他检错措施,具有极好的检错效果9.CAN 的通信介质可为双绞线、同轴电缆或光纤,选择灵活10.CAN 节点在错误严重的情况下具有自动关闭输出功能,已使总线上其他节点的操作不受影响11.CAN 总线具有较高的性能价格比【总线拓扑图】CAN 控制器根据两根线上的电位差来判断总线电平。
总线电平分为显性电平和隐性电平,二者必居其一。
发送方通过使总线电平发生变化,将消息发送给接收方,如图。
【错误状态种类】1.主动错误状态 主动错误状态是可以正常参加总线通信的状态。
处于主动错误状态的单元检测出错误时,输出主动错误标识。
2.被动错误状态 被动错误状态是易引起错误的状态。
处于被动错误状态的单元虽能参加总线通信,但为不妨碍其他单元通信,接收时不能积极地发送错误通知。
处于被动错误状态的单元即使检测出错误,而其他处于主动错误状态的单元如果没有发现错误,整个总线也被认为是没有错误的。
CAN-bus总线现场布线、接口、电缆和连接器
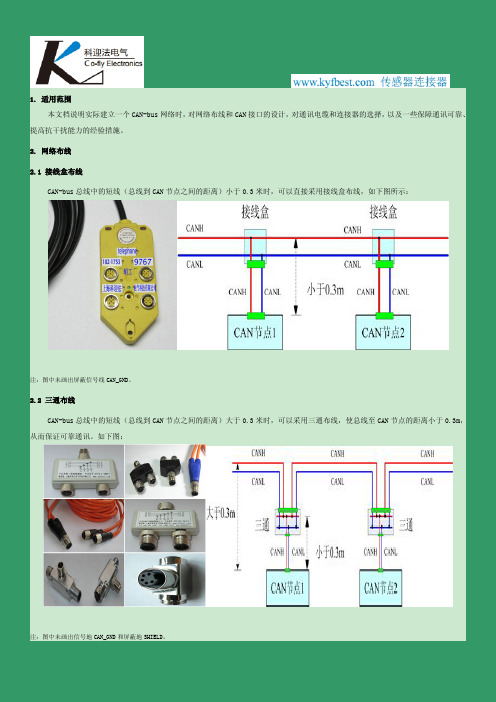
1.适用范围本文档说明实际建立一个CAN-bus网络时,对网络布线和CAN接口的设计,对通讯电缆和连接器的选择,以及一些保障通讯可靠、提高抗干扰能力的经验措施。
2.网络布线2.1接线盒布线CAN-bus总线中的短线(总线到CAN节点之间的距离)小于0.3米时,可以直接采用接线盒布线,如下图所示:注:图中未画出屏蔽信号线CAN_GND。
2.2三通布线CAN-bus总线中的短线(总线到CAN节点之间的距离)大于0.3米时,可以采用三通布线,使总线至CAN节点的距离小于0.3m,从而保证可靠通讯。
如下图:注:图中未画出信号地CAN_GND和屏蔽地SHIELD。
2.3接线盒和三通布线CAN-bus总线中的短线(总线到CAN节点之间的距离)大于0.3米时,为了布线方便,可以同时选用接线盒和三通布线,如下图:注:图中未画出屏蔽信号线CAN_GND。
实际布线中,可以将接线盒与CAN节点之间的线缆和连接器(三通)进行标准化设计,然后作为布线施工中的标准化配件。
如下图:注:图中未画出信号地CAN_GND和屏蔽地SHIELD。
CAN总线发展控制器局域网CAN(Controller Area Network)属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。
是由德国博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。
由于其高性能、高可靠性以及独特的设计而越来越受到人们的重视,被广泛应用于诸多领域。
而且能够检测出产生的任何错误。
当信号传输距离达到10km时,CAN仍可提供高达50kbit/s的数据传输速率。
由于CAN总线具有很高的实时性能和应用范围,从位速率最高可达1Mbps的高速网络到低成本多线路的50Kbps网络都可以任意搭配。
因此,CAN己经在汽车业、航空业、工业控制、安全防护等领域中得到了广泛应用。
随着CAN总线在各个行业和领域的广泛应用,对其的通信格式标准化也提出了更严格的要求。
1991年CAN总线技术规范(Version2.0)制定并发布。
整车CAN通讯协议的基本拓扑结构详解
整车CAN通讯协议的基本拓扑结构详解电动汽车,以电池和(电机)系统取代了内燃机汽车的发动机系统,使得汽车上主要的结构和(电气)件发生了很大变化。
在传统汽车上已经比较成熟的(CAN)(总线技术),电动汽车仍然需要作出必要调整才能够使用。
1 电动汽车的CAN协议常用车辆CAN总线通讯协议,大多直接采用SAE-J1939的形式制定。
电动汽车首先遇到了电池系统、电机系统等新加入电器需要重新设定PGN码等问题。
CAN协议始终处在诸侯割据的状态。
在过去的几年中,国家及相关机构也一直在对电动汽车的CAN通讯协议进行研究,希望形成统一的协议体系。
统一的CAN协议,首先是零部件供应商的福音。
当前主流主机厂,每家都有自己的整车通讯协议,各个供应商,需要根据整车厂的定义,修改零部件的CAN协议。
制定电动汽车的CAN协议,基本的思路是在SAE-J1939的基础上,根据自身电动汽车的需求,做出必要的调整。
1.1 原则常用的CAN总线协议标准SAE-J1939中,标准给OSI(开放系统互联参考模型)定义成七层:物理层,数据链路层,(网络)层,传输层,会话层,表示层,应用层。
其中物理层和数据链路层是最基础的两层,在标准ISO 11898中进行定义,并且不可变更。
而SAE-J1939定义了应用层的相关会话规则,所谓通讯协议。
因此我国的CAN (通信)协议的制定主要包括物理层和应用层协议两个方面,其中最主要的工作还是集中在应用层上。
1.2 物理层物理层对一系列(硬件)参数进行了规定,包含总线供电电压、接入系统设备数目、允许的连接器类型、线缆长度以及波特率等。
我们的物理层特性基本完全继承J1939物理层规范,相应的,参数基本与J1939保持一致。
比如CAN2.0B,接入系统的设备数目,最多30个;终端电阻阻值120欧姆,波特率250kbits,线束建议采用双绞线、同轴电缆等等。
1.3 应用层应用层主要规定的内容包括:标识符的分配,报文的发送和接收规则,系统内节点的优先级分配等等。
can总线解决方案
can总线解决方案
《Can总线解决方案》
Can总线是一种广泛应用于汽车、工业控制和其他领域的串行
通信协议,它具有高可靠性、低成本和实时性强的特点。
随着现代汽车和工业控制系统对通信效率和可靠性要求的提高,Can总线技术也不断得到改进和完善。
为了解决Can总线在实际应用中可能遇到的问题,人们提出了各种解决方案。
首先,Can总线解决方案的关键之一是网络拓扑结构的设计。
不同的应用场景需要不同的网络拓扑结构,如星型、环型、总线型等。
合理的网络拓扑结构可以提高系统的稳定性和可靠性,降低通信延迟。
其次,Can总线解决方案还包括通信协议的优化。
Can总线通
信协议本身具有一定的帧格式和传输速率,但在实际应用中可能需要额外的协议或协议栈来满足特定要求。
例如,对于高速高精度的工业控制系统,可能需要使用Canopen或DeviceNet
等协议来实现更复杂的通信功能。
此外,Can总线解决方案还涉及硬件和软件方面的优化。
在硬
件设计上,可以采用抗干扰性能更好的芯片和模块,增强系统的抗干扰能力;在软件开发上,可以采用更高效的通信协议栈和驱动程序,提高数据传输的速度和稳定性。
总之,Can总线解决方案是一个综合性的工程问题,需要考虑
硬件、软件、通信协议等多个方面的因素。
只有在这些方面都
得到合理的设计和优化,才能实现Can总线系统的高效、稳定和可靠运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAN通信网络试题设计要求
(1)通信拓扑图
利用CAN分析仪,完成控制中心与列控中心之间的CAN数据通信。
绘制CAN分析仪、列控中心、控制中心的无线通信网络拓扑图,划线时无粗细和箭头要求,但要在信号线上标注好CAN通信总线接口定义。
将此拓扑图截图,命名为“图2-12-CAN通信网络拓扑”,并将图片粘贴至U盘根目录“提交资料\竞赛答题卡.doc”指定位置。
(2)设计方案
在U盘根目录“提交资料\竞赛答题卡.doc”指定位置填写以下表格,完成CAN分析仪、列控中心、控制中心的通信方案设计,从而实现列控中心与控制中心间的数据透传。