PID控制的一阶倒立摆控制系统设计
PID控制的一级倒立摆优化控制课程设计
PID控制的一级倒立摆优化控制问题摘要:直线一级倒立摆,是由沿直线导轨运动的小车以及一端固定于小车的匀质长杆组成的非线性的、不稳定的系统。
本文主要介绍了将一阶倒立摆的数学模型加入PID调节来控制它,从而使其成为稳定的系统,并对整个过程进行了matlab仿真和分析。
关键字:一级倒立摆、PID调节控制器、matlab仿真Abstract:First-order linear inverted pendulum is composed of a trolley, moved along the linear guides, and a homogeneous pole, one end of which is fixed at the car. However, this system is non-linear and unstable.This paper describes the first-order mathematical model of inverted pendulum by adding PID regulator to control it, making it a stable system, and the whole process a matlab simulation and analysis.Keywords: Linear inverted pendulum、PID controller 、MATLAB simulation引言:倒立摆系统是理想的自动控制教学实验设备,使用它能全方位的满足自动控制教学的要求。
许多抽象的控制概念如系统稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆直观的表现出来。
学习自动控制理论的学生通过倒立摆系统实验来验证所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。
倒立摆不仅仅是一种优秀的教学实验仪器,同时也是进行控制理论研究的理想实验平台。
基于双闭环PID控制的一阶倒立摆控制系统设计
基于双闭环PID控制的一阶倒立摆控制系统设计一阶倒立摆是一种常见的控制系统,它由一个旋转臂和一个悬挂在旋转臂末端的摆杆组成。
控制目标是使摆杆保持垂直位置并保持在指定的角度范围内。
本文将基于双闭环PID控制设计一阶倒立摆控制系统,并对其进行详细的分析和讨论。
首先,我们需要明确控制系统的结构。
一阶倒立摆控制系统可以分为两个闭环:内环和外环。
内环用于控制旋转臂的角度,并将输出作为外环的输入。
外环用于控制摆杆的角度,并根据测量的摆杆角度和设定的目标角度来调整内环的输入。
在进行控制系统设计之前,我们需要先建立一阶倒立摆的数学模型。
假设倒立摆的质量集中在摆杆的一端,摆杆的长度为L,质量为m,摩擦系数为b,重力加速度为g。
通过应用牛顿第二定律,可以得到如下动力学方程:mL²θ¨ + bLθ˙ + mgLsinθ = u其中,θ是旋转臂的角度,u是旋转臂的扭矩。
为了简化方程,我们进行恒定参数修正和线性化处理,得到线性方程:θ¨ + 2ξωnθ˙ + ωn²θ = kru其中,ξ是阻尼比,ωn是无阻尼自然频率,kr是旋转臂的增益。
接下来,我们将按照以下步骤设计基于双闭环PID控制的一阶倒立摆控制系统:1.内环设计:-选择合适的内环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
可以使用试错法、经验法、系统辨识等方法进行参数调整。
-将PID控制器的输入设置为旋转臂角度误差,输出为旋转臂的扭矩。
2.外环设计:-选择合适的外环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
-将PID控制器的输入设置为摆杆角度误差,输出为旋转臂的角度设定值。
3.进行系统仿真和调试:-使用MATLAB等仿真工具建立一阶倒立摆的数学模型,并将设计的控制器与模型进行集成。
-调整控制器的参数,以满足性能指标和系统稳定性的要求。
基于双闭环PID控制的一阶倒立摆控制系统设计

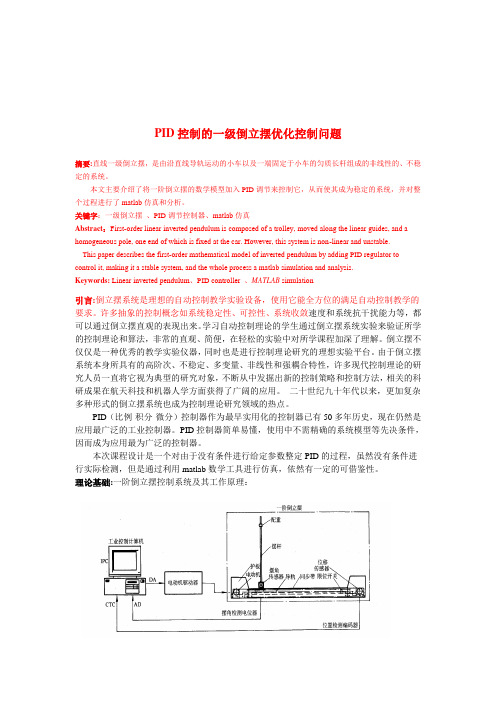
自动控制原理课程设计说明书基于双闭环PID控制的一阶倒立摆控制系统设计姓名:学号:学院:专业:指导教师:2018年 1月目录1 任务概述 (3)1.1设计概述 (3)1.2 要完成的设计任务: (4)2系统建模 (4)2.1 对象模型 (4)2.2 模型建立及封装 (5)3仿真验证 (9)3.1 实验设计 (9)3.2 建立M文件编制绘图子程序 (9)4 双闭环PID控制器设计 (12)4.1内环控制器的设计 (13)4.2外环控制器的设计 (13)5 仿真实验 (15)5.1简化模型 (15)5.2 仿真实验 (17)6 检验系统的鲁棒性 (18)6.1 编写程序求系统性能指标 (18)6.2 改变参数验证控制系统的鲁棒性 (19)7 结论 (22)附录 (22)1 任务概述1.1设计概述如图1 所示的“一阶倒立摆控制系统”中,通过检测小车位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC)完成。
图1 一阶倒立摆控制系统这是一个借助于“SIMULINK封装技术——子系统”,在模型验证的基础上,采用双闭环PID控制方案,实现倒立摆位置伺服控制的数字仿真实验。
1.2 要完成的设计任务:(1)通过理论分析建立对象模型(实际模型),并在原点进行线性化,得到线性化模型;将实际模型和线性化模型作为子系统,并进行封装,将倒立摆的振子质量m和倒摆长度L作为子系统的参数,可以由用户根据需要输入;(2)设计实验,进行模型验证;(3)一阶倒立摆系统为“自不稳定的非最小相位系统”。
将系统小车位置作为“外环”,而将摆杆摆角作为“内环”,设计内化与外环的PID控制器;(4)在单位阶跃输入下,进行SIMULINK仿真;(5)编写绘图程序,绘制阶跃响应曲线,并编程求解系统性能指标:最大超调量、调节时间、上升时间;(6)检验系统的鲁棒性:将对象的特性做如下变化后,同样在单位阶跃输入下,检验所设计控制系统的鲁棒性能,列表比较系统的性能指标(最大超调量、调节时间、上升时间)。
针对直线一级倒立摆的PID控制系统设计
沈阳航空航天大学课程设计(论文)题目针对直线一级倒立摆的PID控制系统设计班级 94070201学号 *************学生姓名农夫三拳指导教师沈阳航空航天大学课程设计任务书课程名称计算机控制技术课程设计院(系)自动化学院专业自动化班级9407201 学号2009040702020 姓名农夫三拳课程设计题目针对直线一级倒立摆的PID控制系统设计课程设计时间: 2012 年7 月9 日至2012 年7 月20日课程设计的内容及要求:1. 内容以直线一级倒立摆实验平台为实验对象,设计一个计算机控制的PID控制系统。
保证倒立摆的摆杆垂直于水平面。
2. 要求(1)制定设计方案,并绘制出系统工作框图。
(2)按要求设计PID控制算法,并编写程序。
(3)用matlab进行程序设计与调试并进行仿真。
(4)通过直线一级倒立摆实验平台检验PID控制器的实际控制效果。
(5)撰写一篇6000~8000字左右的课程设计报告。
指导教师年月日负责教师年月日学生签字年月日目录0. 前言 (1)1. 倒立摆数学模型和编码器基本理论 (2)2. 方案设计 (5)3. 硬件电路的工作原理 (6)3.1PID控制模块 (6)3.2real control模块 (6)4. 软件编程 (7)5. matlab仿真及系统调试和结果分析 (8)6. 结论及进一步设想 (13)参考文献 (14)附录1 元件清单 (15)课设体会 (16)针对直线一级倒立摆的PID控制系统设计农夫三拳沈阳航空航天大学自动化学院摘要:倒立摆系统的控制是控制理论应用的一个典型范例,其结构简单、成本较低,便于用模拟或数字方法进行控制。
虽然其结构形式多种多样,但无论何种结构,就其本身而言,都是一个非最小相位、多变量、绝对不稳定的非线性系统。
由于倒立摆系统的绝对不稳定性,必须采取有效的措施稳定它。
其控制方法在军工、航天、机器人领域和一般工业过程中都有着广泛的用途。
基于双闭环PID控制的一阶倒立摆控制系统设计
自动控制原理课程设计说明书基于双闭环PID控制的一阶倒立摆控制系统设计姓名:学号:学院:专业:指导教师:2018年 1月目录1 任务概述 (3)1.1设计概述 (3)1.2 要完成的设计任务: (4)2系统建模 (4)2.1 对象模型 (4)2.2 模型建立及封装 (5)3仿真验证 (9)3.1 实验设计 (9)3.2 建立M文件编制绘图子程序 (9)4 双闭环PID控制器设计 (12)4.1内环控制器的设计 (13)4.2外环控制器的设计 (13)5 仿真实验 (15)5.1简化模型 (15)5.2 仿真实验 (16)6 检验系统的鲁棒性 (18)6.1 编写程序求系统性能指标 (18)6.2 改变参数验证控制系统的鲁棒性 (19)7 结论 (22)附录 (22)1 任务概述1.1设计概述如图1 所示的“一阶倒立摆控制系统”中,通过检测小车位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC)完成。
图1 一阶倒立摆控制系统这是一个借助于“SIMULINK封装技术——子系统”,在模型验证的基础上,采用双闭环PID控制方案,实现倒立摆位置伺服控制的数字仿真实验。
1.2 要完成的设计任务:(1)通过理论分析建立对象模型(实际模型),并在原点进行线性化,得到线性化模型;将实际模型和线性化模型作为子系统,并进行封装,将倒立摆的振子质量m和倒摆长度L作为子系统的参数,可以由用户根据需要输入;(2)设计实验,进行模型验证;(3)一阶倒立摆系统为“自不稳定的非最小相位系统”。
将系统小车位置作为“外环”,而将摆杆摆角作为“内环”,设计内化与外环的PID控制器;(4)在单位阶跃输入下,进行SIMULINK仿真;(5)编写绘图程序,绘制阶跃响应曲线,并编程求解系统性能指标:最大超调量、调节时间、上升时间;(6)检验系统的鲁棒性:将对象的特性做如下变化后,同样在单位阶跃输入下,检验所设计控制系统的鲁棒性能,列表比较系统的性能指标(最大超调量、调节时间、上升时间)。
PID控制的一阶倒立摆控制系统设计

基于双闭环PID控制的一阶倒立摆控制系统设计一、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。
二、设计要求倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用MATLAB进行仿真,并用simulink对相应的模块进行仿真。
三、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡。
四、设计步骤首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图下面的工作是根据结构框图,分析和解决各个环节的传递函数!1.一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中: M :小车质量 m :为摆杆质量 J :为摆杆惯量 F :加在小车上的力 x :小车位置θ:摆杆与垂直向上方向的夹角 l :摆杆转动轴心到杆质心的长度根据牛顿运动定律以及刚体运动规律,可知: (1) 摆杆绕其重心的转动方程为(2) 摆杆重心的运动方程为得sin cos ..........(1)y x J F l F l θθθ=-2222(sin ) (2)(cos ) (3)x y d F m x l d td F mg m l d t θθ=+=-(3)小车水平方向上的运动为22..........(4)x d xF F M d t-=联列上述4个方程,可以得出一阶倒立精确气模型:()()()()()()()2222222222222222sin .sin cos cos cos .sin cos .lg sin cos J ml F ml J ml m l g x J ml M m m l ml F m l M m m m l M m J ml θθθθθθθθθθθθ⎧+++-⎪=++-⎪⎨+-+⎪=⎪-++⎩式中J 为摆杆的转动惯量:32ml J =若只考虑θ在其工作点附近θ0=0附近(︒︒≤≤-1010θ)的细微变化,则可以近似认为:⎪⎩⎪⎨⎧≈≈≈1cos sin 02θθθθ ⎪⎪⎩⎪⎪⎨⎧++-+=++-+=2..2222..)(lg )()()(Mml m M J mlF m m M Mml m M J g l m F ml J x θθθ 若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2 l =1m,重力加速度取g=2/10s m ,则可以得 一阶倒立摆简化模型:....0.44 3.330.412x F F θθθ⎧=-⎪⎨⎪=-+⎩即 G 1(s)= ; G 2(s)=一阶倒立摆环节问题解决!2.电动机驱动器选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下:222()0.4()12() 1.110()s F s s x s s s s θθ-⎧=⎪-⎪⎨-+⎪=⎪⎩驱动电压:U=0~100V 额定功率:PN=200W 额定转速:n=3000r/min 转动惯量:J=3×10-6kg.m2 额定转矩:TN=0.64Nm 最大转矩:TM=1.91Nm 电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s经传动机构变速后输出的拖动力为:F=0~16N ;与其配套的驱动器为:MSDA021A1A ,控制电压:UDA=0~±10V 。
直线一级倒立摆系统的PID控制算法设计
摘要直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一。
设计直线一级倒立摆前,首先要应清楚直线一级倒立摆的定义及它的特性,其次用数学建模的方法建立直线一级倒立摆模型。
再次PID控制器的结构与参数设计,将直线一级倒立摆当作简单的单输入单输出系统(忽略了小车位移的控制),采用了 PID控制器设计方法进行了控制器结构设计和参数设计。
确定PID控制器主要参数KP、KI、KD,通过改变这三个参数的值,使直线一级倒立摆由开环不稳定系统变为闭环稳定系统。
直线一级倒立摆系统在PID控制器下用MATLAB进行仿真,通过改变控制器PID主要参数,使得仿真曲线更接近理论曲线。
这些便是直线一级倒立摆系统的PID控制算法设计的主要内容。
关键词:直线一级倒立摆;Matlab仿真;PID控制ABSTRACTInverted pendulum linear 1-stage stands upside down suspends is composed by the translation module and the level pendulum mass module, is most common stands upside down suspends one Front the design straight line level stands upside down suspends, first must be supposed the clear straight line level to stand upside down the definition and its characteristic which suspends, next stands upside down with mathematics modelling method establishment straight line level suspends the model. Once more the PID controller structure and the parameter design, stood upside down Inverted pendulum linear 1-stage suspends the regard simple single input list output system (to neglect car displacement control), used the PID controller design method to carry on the controller structural design and the parameter design. Determined PID controller main parameter KP, KI, KD, through change these three parameters the value, causes the straight line level to stand upside down suspends becomes the closed loop stable system by the split-ring unstable system. Inverted pendulum linear 1-stage stands upside down suspends the system to carry on the simulation under the PID controller with MATLAB, through the change controller PID main parameter, causes the simulation curve closer theoretical curve.These then are the straight line level stands upside down suspends the system the PID control algorithm design primary coverage.Keywords:Inverted pendulum linear;Matlab Simulation; PID control目录第1章绪论 (1)第2章倒立摆系统 (2)2.1 系统的组成 (3)2.1.1 倒立摆本体 (3)2.1.2 电控箱 (4)2.1.3 电机 (4)2.1.4 编码器 (4)2.1.5 控制卡 (5)2.2 系统使用说明 (5)2.2.1 直线一级摆硬件操作系统 (5)2.2.2 一级摆软件操作说明 (5)第3章自动控制及MATLAB软件介绍 (7)3.1自动控制概念 (7)3.2 自动控制系统的类型 (8)3.2.1 随机系统与自动调整系统 (8)3.2.2 线性系统和非线性系统 (9)3.2.3 连续系统和离散系统 (9)3.2.4 单输入单输出系统和多输入多输出系统 (9)3.2.5 确定系统与不确定系统 (9)3.2.6 集中参数系统和分布参数系统 (9)3.3 自动控制理论概要 (10)3.3.1 自动控制系统所要分析的问题 (10)3.3.2 自动控制系统的设计问题 (10)3.4 MATLAB实验软件 (10)3.5.1 MATLAB的基本介绍 (11)3.5.2 MATLAB程序设计基础 (12)第4章 PID控制 (13)4.1 PID控制原理 (13)4.2 数字PID控制 (14)4.2.1 位置式PID控制算法 (14)4.2.2 增量式PID控制算法 (15)4.3 常见的PID控制系统 (15)4.3.1 串级PID控制 (15)4.3.2 纯滞后系统的大林控制算法 (16)4.3.3 纯滞后系统的smith控制算法 (17)第5章直线一级倒立摆的牛顿—欧拉方法建模 (19)5.1 微分方程的推导 (19)5.2 传递函数 (21)5.3 状态方程 (21)5.4 实际系统模型 (23)5.5 采用MATLAB语句形式进行仿真 (24)第6章直线一级倒立摆控制器设计及仿真 (27)6.1 PID参数的调整 (28)6.2 PID控制回路运行 (28)6.3直线一级倒立摆PID控制器设计 (29)6.4直线一级倒立摆PID控制器设计MATLAB仿真 (32)结论 (37)参考文献 (38)致谢 (39)附录 (40)第1章绪论计算机的诞生和发展给自动控制增添了先进的工具,现代控制理论的发展,又给自动控制提供了新的理论支柱。
直线一级倒立摆系统的PID控制算法设计
摘要直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一。
设计直线一级倒立摆前,首先要应清楚直线一级倒立摆的定义及它的特性,其次用数学建模的方法建立直线一级倒立摆模型。
再次PID控制器的结构与参数设计,将直线一级倒立摆当作简单的单输入单输出系统(忽略了小车位移的控制),采用了 PID控制器设计方法进行了控制器结构设计和参数设计。
确定PID控制器主要参数KP、KI、KD,通过改变这三个参数的值,使直线一级倒立摆由开环不稳定系统变为闭环稳定系统。
直线一级倒立摆系统在PID控制器下用MATLAB进行仿真,通过改变控制器PID主要参数,使得仿真曲线更接近理论曲线。
这些便是直线一级倒立摆系统的PID控制算法设计的主要内容。
关键词:直线一级倒立摆;Matlab仿真;PID控制ABSTRACTInverted pendulum linear 1-stage stands upside down suspends is composed by the translation module and the level pendulum mass module, is most common stands upside down suspends one Front the design straight line level stands upside down suspends, first must be supposed the clear straight line level to stand upside down the definition and its characteristic which suspends, next stands upside down with mathematics modelling method establishment straight line level suspends the model. Once more the PID controller structure and the parameter design, stood upside down Inverted pendulum linear 1-stage suspends the regard simple single input list output system (to neglect car displacement control), used the PID controller design method to carry on the controller structural design and the parameter design. Determined PID controller main parameter KP, KI, KD, through change these three parameters the value, causes the straight line level to stand upside down suspends becomes the closed loop stable system by the split-ring unstable system. Inverted pendulum linear 1-stage stands upside down suspends the system to carry on the simulation under the PID controller with MATLAB, through the change controller PID main parameter, causes the simulation curve closer theoretical curve.These then are the straight line level stands upside down suspends the system the PID control algorithm design primary coverage.Keywords:Inverted pendulum linear;Matlab Simulation; PID control目录第1章绪论 (1)第2章倒立摆系统 (2)2.1 系统的组成 (3)2.1.1 倒立摆本体 (3)2.1.2 电控箱 (4)2.1.3 电机 (4)2.1.4 编码器 (4)2.1.5 控制卡 (5)2.2 系统使用说明 (5)2.2.1 直线一级摆硬件操作系统 (5)2.2.2 一级摆软件操作说明 (5)第3章自动控制及MATLAB软件介绍 (7)3.1自动控制概念 (7)3.2 自动控制系统的类型 (8)3.2.1 随机系统与自动调整系统 (8)3.2.2 线性系统和非线性系统 (9)3.2.3 连续系统和离散系统 (9)3.2.4 单输入单输出系统和多输入多输出系统 (9)3.2.5 确定系统与不确定系统 (9)3.2.6 集中参数系统和分布参数系统 (9)3.3 自动控制理论概要 (10)3.3.1 自动控制系统所要分析的问题 (10)3.3.2 自动控制系统的设计问题 (10)3.4 MATLAB实验软件 (10)3.5.1 MATLAB的基本介绍 (11)3.5.2 MATLAB程序设计基础 (12)第4章 PID控制 (13)4.1 PID控制原理 (13)4.2 数字PID控制 (14)4.2.1 位置式PID控制算法 (14)4.2.2 增量式PID控制算法 (15)4.3 常见的PID控制系统 (15)4.3.1 串级PID控制 (15)4.3.2 纯滞后系统的大林控制算法 (16)4.3.3 纯滞后系统的smith控制算法 (17)第5章直线一级倒立摆的牛顿—欧拉方法建模 (19)5.1 微分方程的推导 (19)5.2 传递函数 (21)5.3 状态方程 (21)5.4 实际系统模型 (23)5.5 采用MATLAB语句形式进行仿真 (24)第6章直线一级倒立摆控制器设计及仿真 (27)6.1 PID参数的调整 (28)6.2 PID控制回路运行 (28)6.3直线一级倒立摆PID控制器设计 (29)6.4直线一级倒立摆PID控制器设计MATLAB仿真 (32)结论 (37)参考文献 (38)致谢 (39)附录 (40)第1章绪论计算机的诞生和发展给自动控制增添了先进的工具,现代控制理论的发展,又给自动控制提供了新的理论支柱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于双闭环PID控制的一阶倒立摆控制系统设计一、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。
二、设计要求倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用MATLAB进行仿真,并用simulink对相应的模块进行仿真。
三、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡。
四、设计步骤首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图 F 面的工作是根据结构框图,分析和解决各个环节的传递函数!1•一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和 匀质杆组成的系统,如下图所示, 其中:M :小车质量 m :为摆杆质量J :为摆杆惯量F :加在小车上的力 x :小车位置。
:摆杆与垂直向上方向的夹角l :摆杆转动轴心到杆质心的长度根据牛顿运动定律以及刚体运动规律, (1) 摆杆绕其重心的转动方程为J 0=F/sin 0-F/cos 0(1)yx'/(2) 摆杆重心的运动方程为d 2=m-d 2t工业控制计算机电动机驰动器一阶倒立摆—Lb D 购*.—dl卜DI ⑸J bD I 即可知: (x +1sin 0)(l cos0)d 2t(3) 小车水平方向上的运动为d 2x d 2t联列上述4个方程,可以得出一阶倒立精确气模型:J +ml 2)F +mlG +ml 2)(M +m )-m 2/2cos 20+m )m lgsin 0ml 2)""若只考虑e 在其工作点附近e=0附近(-10°<0<10。
)的细微变化,则可以近似认为: (J +ml 2)F -m 2l 2g 0x =J (M +m )+Mml 2©(M +m )m lg 0-mlF0=—J (M +m )+Mml 2若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2l =1m,重力加速度取g=10m /s 2,则可以得 一阶倒立摆简化模型:0(s )=-0.4F (s )s 2-12X (s )=-1.1s 2+100(s )s 2一阶倒立摆环节问题解决!2.电动机驱动器J +ml 2)sin 0.02-m 212g sin 0cos 0ml cos 0.F +m 212sin 0cos 0020=式中J 为摆杆的转动惯量:J =ml 202u 0 <sin 0u 0 cos 0u 1X =0.44F -3.3300=-0.4F +120-1.1/-1QG i (s)二-_-0.4m 212cos 20-(M +m拉氏变换选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下: 驱动电压:U=0~100V 额定功率:PN=200W额定转速:n=3000r/min 转动惯量:J=3X10-6kg.m2额定转矩:TN=0.64Nm 最大转矩:TM=1.91Nm电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s经传动机构变速后输出的拖动力为:F=0~16N;与其配套的驱动器为:MSDA021A1A,控制电压:UDA=0~±10V。
若忽略电动机的空载转矩和系统摩擦,就可以认为驱动器和机械传动装置均为纯比例环节,并假设这两个环节的增益分别为Kd和Km。
KvTTs2+Ts+1mlmG(s)=KKK=Kdvm.K=^max==1.6s U10max即D3(s)=1.6电动机驱动器部分问题解决!3•双闭环PID控制器设计剩下的问题就是如何确定控制器D(S”D]和D(S Y D'(S)的结构和参数。
(一)内环控制器的设计图5-27反锻校正控制的系统内环框图其中,Ks=1.6为伺服电动机与减速机构的等效模型1.控制器的选择内环系统未校正时的传递函数为FS )=話2对于内环反馈控制器D2(s)可有PD ,PI ,PID 三种可能的结构形式,怎么选 取呢?这里,不妨采用绘制各种控制器结构下“系统根轨迹”的办法加以分析比较,从之选出一种比较适合的控制器结构。
各种控制器的开环传函的传递函数分别为:—6.4KP :ps 2—12—6.4Ks —6.4KPD :D ps 2—12 —6.4Ks —6.4KPI :pis (s 2一12)—6.4Ks 2—6.4Ks —6.4KPID :p p 1s (s 2—⑵在MATLAB 下输入以下程序用“凑试”的方法画根轨迹图:num=[分子]; den=[分母];xlabel('RealAxis'); ylabel('ImagAxis');axis([横、纵坐标范围]); title('RootLocus'); grid;rlocus(num,den)下图为各种控制器下的系统根轨迹。
(a )PD(b )PD芒②15-10上:5111520脳1嘟rKElLctLH;(c )PId )PID从根轨迹不难发现,采用PD 结构的反馈控制器,结构简单且可保证闭环系统的稳定。
所以,选定反馈控制器的结构为PD 形式的控制器。
2•控制器参数的选定首先暂定K=-20。
这样可以求出内环的传递函数为:-04()-20k 1.6<・W :Kgs )=壬1221+KKG s )D (s )阪U0K ;S +K )32-^力d212.8s 2+12.K d2S +12.^-12注释:工程上常用阻尼比g =0.707作为二阶系统最优解!10W 2=12.8K -12=12.8np22W =12.8K =2x 0.707<\.'I28-Tnd 2解得:K =1.94p2K =0.39 d2n D =0.3%+1.94 2系统内环传递函数为:⑶=2 12.8s 2+5s +12.8AJKMnIK£K <己BJrlEE-3.系统内环的simulink仿真及结果FieEdtShJazorformat]>:店潼p□Q釦』]瞻电|E斜卜■|B®i I S ns t®I--f卜12BIA勺■I■=.0]仿真结果为:L;bes|.inti|Urtls|Style伽ffterClBracieri&lksShawsettingtinewthn|?Shawrisetime1rom二)外环控制器的设计12.8-1.1s 2+1012.8(-l.1s 2+10)W(s)G(s)=x=21s 2+5s+12.8s 2s 2(s 2+5s+12.8) 可见,系统开环传递函数可视为一个高阶(4阶)且带有不稳定零点的“非最小相位系统”,为了便于设计,需要首先对系统进行一些简化处理(否则,不便利用经典控制理论与方法对它进行设计)。
1•系统外环模型的降阶1)对内环等效闭环传递函数的近似处理将高次项s 2忽略,有12.81W (s )沁=(2)25s +12.80.39s +1近似条件可由频率特性导出,即12.812. W (s )= 2 12.8 s 2+5s +12.8 (1)(j®)2+5(j®)+12.8—(12.8―:2)+5妙由(2)得:12.8 5j®+12.812.8 ®2<c10 即:®<1.13c(2)对象模型G1(s)的近似处理-1.1s2+10G(s)= 1 s2(3)G1(s)10U——s2(4)由(3)得:G1(j®)=-1.1(j®)2+1010+1.1®2―®21.102<巴c 10W (s )=D (s )W (s )G (s )=121 取o 二0.9c2.564W (s )=顾吋K p (s +"I 再由“典型II 型”系统Bode 图特性(K =oo )知:1c20K =1x0.9K =0.045 pp3.用simulink 对小车的位置在阶跃信号输入下的响应进行仿真:系统框图为由(4)得: 10 10 一①225.64 s 2(s +2.564),所以,有o W0.95c1p能,采用单位反馈(D ;(s )二K 二1)縣成外环反馈通道,如图所示:仿真结果:倒立摆位置在阶跃信号下的响应3.系统的simulink仿真连接图如下:仿真结果为:倒立摆在阶跃信号下摆杆和小车位置的响应从图中可以看出建立的一阶倒立摆控制系统在matlab中能够实现倒立摆的要求,能通过电动机牵引机构带动小车的移动来控制摆杆和保持平衡。
为了进一步验证在不同摆杆下的,该一阶倒立摆控制系统是否还具有鲁棒特性,分别取摆杆不同的质量和摆长,进行simulink仿真!由图可知,建立的一阶倒立摆模型在不同摆长下能实现要求。
但摆长不能过长!同理,建立的一阶倒立摆模型在不同质量的摆杆下能也实现要求,但同样不能过重!五、课程设计心得1、通过实验了解了一阶倒立摆是的非线性、不确定性、不稳定系统和约束限制,同时倒立摆也是经常作为研究比较不同控制方法的典型例子。
2、对一阶倒立摆控制系统的研究使我了解到倒立摆还有二阶倒立摆、三阶倒立摆,甚至四阶倒立摆,同时还涉及到起摆的问题!增加了了倒立摆研究的兴趣!3、建立的一阶倒立摆控制系统忽略了许多因素,应用一些简化处理,即建立的只是一阶倒立摆控制系统的简化模型。
当摆杆的质量和摆长超过一定范围,系统失效,所以该系统有待改进!。