单级倒立摆系统的分析与设计
倒立摆模糊控制系统设计

倒立摆模糊控制系统设计摘要:本文针对倒立摆的运动控制问题,设计了一种模糊控制系统,用于实现倒立摆的平衡控制。
首先,对于倒立摆的动力学建模进行了分析,并通过控制算法确定了控制系统的目标和控制策略。
然后,根据倒立摆在不同状态下的响应特点,设计了合适的模糊控制规则,并调节了控制参数,以实现系统的优化控制。
最后,在实验中验证了该控制系统的有效性和稳定性。
关键词:倒立摆;模糊控制;动态建模;控制规则设计目标:实现倒立摆的平衡控制,使其能稳定地保持在竖直状态。
设计过程:一、动态建模倒立摆是一种非线性系统,因此需要对其进行动态建模。
考虑倒立摆的运动方程:mL2θ¨+mgLsinθ=up其中,m为摆球的质量,L为摆杆的长度,g为重力加速度,θ为摆杆与竖直方向的夹角,up为施加在摆杆末端的控制力。
将θ和θ¨分别记做y和v,则系统的状态方程可以表示为:y'=v二、控制算法倒立摆的控制目标是使其保持在竖直状态,即y=0,v=0。
根据控制算法的思想,需要设计一个合适的控制策略,使得系统能够在有限时间内达到目标状态并保持在该状态。
采用PD控制器设计控制策略,其中Kp和Kd分别表示比例增益和微分增益。
up=Kp(y-0)+Kd(v-0)三、模糊控制规则根据倒立摆在不同状态下的响应特点,设计了合适的模糊控制规则。
具体而言,将y 和v的取值范围划分为若干个模糊集合,对应于不同的控制动作。
例如,当y远离目标点0时,需要施加较大的控制力;而当y接近目标点时,应逐渐减小控制力以避免过度响应。
通过实验和调节控制参数,确定了合适的模糊控制规则和参数设置,以实现倒立摆的优化控制。
结果与讨论:通过实验验证,该模糊控制系统能够实现倒立摆的平衡控制,并且具有一定的鲁棒性和稳定性。
在控制参数设置上,应根据倒立摆的特点和实际应用需求,进行适当调整,以实现最优控制效果。
电气系统综合设计实验报告直线一级倒立摆控制系统设计

电气控制系统设计——直线一级倒立摆控制系统设计学院轮机工程学院班级电气1111姓名李杰学号 36姓名韩学建学号 35成绩指导老师肖龙海2014 年 12 月 25 日小组成员与分工:韩学建主要任务:二阶系统建模与性能分析,二阶控制器的设计,二阶系统的数字仿真与调试,二阶系统的实物仿真与调试;二阶状态观测器的数字仿真与调试,二阶状态观测器的实物仿真与调试;李杰主要任务:四阶系统建模与性能分析,四阶控制器的设计,四阶系统的数字仿真与调试,四阶系统的实物仿真与调试;四阶状态观测器的数字仿真与调试,四阶状态观测器的实物仿真与调试;前言倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统,倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究;倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展;本报告通过设计二阶、四阶两种倒立摆控制器来加深对实际系统进行建模方法的了解和掌握随动控制系统设计的一般步骤及方法;熟悉倒立摆系统的组成及基本结构并利用MATLAB对系统模型进行仿真,利用学习的控制理论对系统进行控制器的设计,并对系统进行实际控制实验,对实验结果进行观察和分析,研究调节器参数对系统动态性能的影响,非常直观的了解控制器的控制作用;目录第一章设计的目的、任务及要求倒立摆系统的基本结构 (4)设计的目的 (4)设计的基本任务 (4)设计的要求 (4)设计的步骤 (5)第二章一级倒立摆建模及性能分析微分方程的推导 (5)系统的稳定性和能控能观性分析 (11)二阶的能观性、能控性分析 (13)四阶的能观性、能控性分析 (18)第三章倒立摆系统二阶控制器、状态观测器的设计与调试设计的要求 (22)极点配置 (22)控制器仿真设计与调试 (23)状态观测器仿真设计与调试 (28)第四章倒立摆系统四阶控制器、状态观测器的设计与调试设计的要求 (26)极点配置 (26)控制器仿真设计与调试 (27)状态观测器仿真设计与调试 (28)心得体会 (31)参考文献 (31)第一章设计的目的、任务及要求倒立摆系统的基本结构与工作原理图倒立摆系统硬件框图图倒立摆系统工作原理框图倒立摆系统通过计算机、I/O卡、伺服系统、倒立摆本体和光电码盘反馈测量元件组成一个闭环系统;以直线一级倒立摆为例,其工作原理框图如图所示;图中光电码盘1由伺服电机自带,小车的位移可以根据该码盘的反馈通过换算获得,速度信号可以通过对位移的差分得到;各个摆杆的角度由光电码盘2测量并直接反馈到I/O卡,而角速度信号可以通过对角度的差分得到;计算机从I/O卡实时读取数据,确定控制决策电机的输出力矩,并发给I/O卡;I/O卡经过电控箱内部电路产生相应的控制量,驱动电机转动,使小车按控制要求进行运动,以达到控制目的;实验过程中需要了解倒立摆装置基本结构;了解编码盘、行程开关等的基本工作原理;进行行程开关、编码盘和电机基本测试;设计的目的本设计要求我们针对设计要求,利用课堂所学知识及实验室实测来的系统数据采用工程设计法进行一级直线倒立摆控制系统设计;绘制原理图,同时在实验室进行实验检验设计结果,分析数据,编写设计报告;目的是使学生掌握随动控制系统设计的一般步骤及方法;设计的基本任务本课程设计的被控对象采用固高科技生产的GLIP2001一级直线倒立摆;通过设计与调试使学生能够:1熟悉倒立摆系统的组成及其基本结构;2掌握通过解析法建立系统数学模型及进行工作点附近线性化的方法;3掌握系统性能的计算机辅助分析;4掌握系统控制器的设计与仿真;5研究调节器参数对系统动态性能的影响;设计的要求1.熟悉倒立摆系统结构,熟悉倒立摆装置的基本使用方法;2.建立系统的数学模型,并在工作点附近线性化;3.分析系统的稳定性、频域性能、能控性与能观性;4.采用状态空间的极点配置法设计控制器,要求系统调节时间ts<=3s,阻尼比ξ>= and ξ<=1;实验步骤1.倒立摆系统基本结构分析2.对象的建模3..系统性能分析4.控制器设计与调试5.设计报告的撰写第二章一级倒立摆建模及性能分析系统建模可以分为两种:机理建模和实验建模;实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出, 应用数学手段建立起系统的输入-输出关系;这里面包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容;机理建模就是在了解研究对象的运动规律基础上,通过物理、化学的知识和数学手段建立起系统内部的输入-状态关系;对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难;但是忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程;下面采用牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型;微分方程的推导在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图所示;我们不妨做以下假设:M 小车质量m 摆杆质量b 小车摩擦系数l 摆杆转动轴心到杆质心的长度I 摆杆惯量 F 加在小车上的力x 小车位置φ摆杆与垂直向上方向的夹角θ摆杆与垂直向下方向的夹角考虑到摆杆初始位置为竖直向下图是系统中小车和摆杆的受力分析图;其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量;注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向;分析小车水平方向所受的合力,可以得到以下方程:①由摆杆水平方向的受力进行分析可以得到下面等式:②即:③把这个等式代入①式中,就得到系统的第一个运动方程④为了推出系统的第二个运动方程,对摆杆垂直方向上的合力进行分析,可以得到下面方程:⑤⑥力矩平衡方程如下:⑦注意:此方程中力矩的方向,由于θ= π+φ,cosφ= -cosθ,sinφ= -sinθ,故等式前面有负号; 合并这两个方程,约去P 和N ,得到第二个运动方程:⑧设θ=π+φφ是摆杆与垂直向上方向之间的夹角,假设φ与1单位是弧度相比很小,即φ<<1,则可以进行近似处理:用u 来代表被控对象的输入力F ,线性化后两个运动方程如下:⑨对式3-9进行拉普拉斯变换,得到⑩注意:推导传递函数时假设初始条件为0;由于输出为角度φ,求解方程组的第一个方程,可以得到:⑾⑿如果令则有⒀把上式代入方程组的第二个方程,得到:⒁整理后得到传递函数:⒂其中,该系统状态空间方程为:⒃方程组对解代数方程,得到解如下:⒄整理后得到系统状态空间方程:⒅由9的第一个方程为对于质量均匀分布的摆杆有:于是可以得到:化简得到:⒆⒇以小车加速度为输入的系统状态空间方程:稳定性分析P=polyA;r=rootsP;ii=findrealr>0;n=lengthii;ifn>0disp'不稳定';elsedisp'稳定';end不稳定由此得到系统在未加控制器之前是发散的,不稳定的能控能观性分析A= 0 1 0 0;0 0 0 0;0 0 0 1;0 0 0;B= 0 1 0 3';C= 1 0 0 0;0 0 1 0;D= 0 0 ';>> n=4;Uc=ctrbA,B;Vo=obsvA,C;>> ifrankUc==nifrankVo==ndisp'系统状态即能控又能观'else disp'系统状态即能控,但不能观'endelse ifrankVo==ndisp'系统状态能观,但不能控'else disp'系统状态不能控,但也不能观' endend系统状态即能控又能观二阶的能观性、能控性分析>> A=0 1; 0;>> B=0 3';>> C=0 0 ;1 0;>> D=0;二阶能控性分析:>> M=ctrbA,BM =0 33 0>> rankMans =2说明系统是能控的二阶能观性分析:>> N=obsvA,CN =0 11 0>> rankNans =2说明系统是能观的四阶的能观性、能控性>> A=0 1 0 0; 0 0 0 0;0 0 0 1;0 0 0;;>> B=0 1 0 3';>> C= 1 0 0 0;0 0 1 0;>> D=0 0';四阶能控性分析:>> M=ctrbA,BM =0 0 00 0 00 00 0>> rankMans =4说明系统是能控的四阶能观性分析:>> N=obsvA,CN =0 0 00 0 00 0 00 0 00 0 0 00 0 00 0 0 00 0 0>> rankNans =4说明系统是能观的第三章倒立摆系统二阶控制器的设计设计的要求建立以X’’为输入,Φ与Φ’为状态变量,y为输出的模型分析系统的稳定性,能控能观性设计状态反馈控制器进行极点配置,是系统ξ>= ts<=3s极点配置取ξ=,Ts=;则Wn=,极点为±利用MATLAB进行计算:clear;T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1; 0;B=0;3;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=S1,S2;K=placeA,B,P则:K0=,K1=;控制器的仿真测试与调试图二阶系统结构图以小车加速度为输入,摆杆偏移角度和角速度为状态变量的模型,K值为反馈矩阵,输出为角度的波形图仿真波形图:取 &= 极点为:Wn=则 K0= K1= 图仿真结果波形图有次图可得加入控制器之后系统可以稳定,可见控制器的设计是合理的硬件调试硬件调试结构图以小车加速度为输入,摆杆偏移角度和角速度为状态变量的模型,加入Л模块纠正反馈角度符号通过调试K值,当K取的时候,可使仿真结果较稳定;从摆杆的角度可以看出,角度可以稳定下来,施加一干扰后,摆杆可以很快恢复稳定;状态观测器的仿真测试与调试图二阶状态观测器数字仿真图以小车加速度为输入,摆杆偏移角度和角速度为状态变量的模型,K值为反馈矩阵,输出为角度的波形图仿真波形图:取 &= 极点为:Wn=则 K0= K1= 图仿真结果波形图反馈矩阵G的求法T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1; 0;B=0;3;C=1 0;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=S1,S2;OP=5P;G=placeA',C',OPG=实物调试由图可知,施加扰动后摆杆能很快恢复,符合系统要求;第四章倒立摆系统四阶控制器的设计设计要求根据设计要求,确定系统闭环极点,设计状态反馈控制器,并进行仿真、调试验证;极点配置取 &= T= Wn= 极点为:±;-20±利用MATLAB进行计算:T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1 0 0;0 0 0 0;0 0 0 1;0 0 0;B=0;1;0;3;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=,-20+,S1,S2;K=placeA,B,Pk0=,k1=,k2= ,k3=;则K=控制器的仿真测试与调试图四阶系统仿真结构图以小车加速度为输入,摆杆角度、角速度、小车位移、加速度为状态变量,上半部分为位移输出,下半部分为角度输出仿真结果:位移:角度:实物调试:图硬件调试结构图将K1、K2、K3、K4合并后反馈作用系统,系统为单输入双输出四阶一级倒立摆状态空间极点配置实时控制结果平衡时上为位移,下位角度直线一级倒立摆状态空间极点配置实时控制结果施加干扰上为位移,下位角度状态观测器仿真设计与调试图四阶状态观测器数字仿真图四阶系统仿真结构图以小车加速度为输入,摆杆角度、角速度、小车位移、加速度为状态变量,上半部分为位移输出,下半部分为角度输出反馈矩阵G的求法T=input'T=';zeta=input'zeta=';Wn=4/Tzeta;A=0 1 0 0;0 0 0 0;0 0 0 1;0 0 0;B=0;1;0;3;C=1 0 0 0;0 0 1 0;S1=-zetaWn-Wnsqrtzeta^2-1;S2=-zetaWn+Wnsqrtzeta^2-1;P=,-10+,S1,S2;OP=3P;G=placeA',C',OP'G =实物调试反馈矩阵G和增益矩阵K分别调用matlab程序即可实物仿真与结果心得体会通过此次课程设计,使我更加扎实的掌握了有关MATLAB方面的知识,在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足;实践出真知,通过亲自动手制作,使我们掌握的知识不再是纸上谈兵;课程设计诚然是一门专业课,给我很多专业知识以及专业技能上的提升,同时又是一门讲道课,一门辩思课,给了我许多道,给了我很多思,给了我莫大的空间;同时,设计让我感触很深;使我对抽象的理论有了具体的认识;通过这次课程设计,我掌握了倒立摆装置的识别和测试;熟悉了控制系统的设计原理;了解了现代控制理论的设计方法;以及如何提高倒立摆系统的性能等等,掌握了MATLAB、simulink的使用方法和技术,通过查询资料,对所学知识有了很多新的认识;自己写主要参考文献:1.夏德玲、翁贻方,自动控制理论.北京,北京工业大学出版社,2006年1月2.刘豹、唐万生,现代控制理论.北京,机械工业出版社,2006年6月3.李国勇、谢克明,计算机仿真技术与CAD.北京,电子工业出版社,2009年1月4.Googol Technology直线倒立摆系统GLIP系列安装与使用手册固高科技。
(完整版)一级倒立摆系统分析
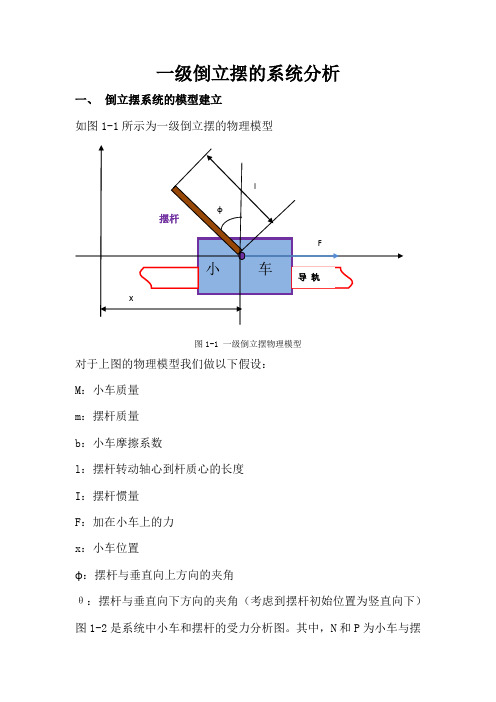
一级倒立摆的系统分析一、倒立摆系统的模型建立如图1-1所示为一级倒立摆的物理模型图1-1 一级倒立摆物理模型对于上图的物理模型我们做以下假设:M:小车质量m:摆杆质量b:小车摩擦系数l:摆杆转动轴心到杆质心的长度I:摆杆惯量F:加在小车上的力x:小车位置ɸ:摆杆与垂直向上方向的夹角θ:摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)图1-2是系统中小车和摆杆的受力分析图。
其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
注意:实际倒立摆系统中的检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。
图1-2 小车及摆杆受力分析分析小车水平方向受力,可以得到以下方程:M ẍ=F-bẋ-N (1-1)由摆杆水平方向的受力进行分析可以得到以下方程:N =md 2dt 2(x +l sin θ) (1-2)即: N =mẍ+mlθcos θ−mlθ2sin θ (1-3)将这个等式代入式(1-1)中,可以得到系统的第一个运动方程: (M +m )ẍ+bẋ+mlθcos θ−mlθ2sin θ=F (1-4)为推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得出以下方程: P −mg =md 2dt 2(l cos θ) (1-5)P −mg =− mlθsin θ−mlθ2cos θ (1-6) 利用力矩平衡方程可以有:−Pl sinθ−Nl cosθ=Iθ (1-7)注意:此方程中的力矩方向,由于θ=π+ɸ,cosɸ=−cosθ,sinɸ=−sinθ,所以等式前面含有负号。
合并两个方程,约去P和N可以得到第二个运动方程:(I+ml2)θ+mgl sinθ=−mlẍcosθ (1-8)设θ=π+ɸ,假设ɸ与1(单位是弧度)相比很小,即ɸ<<1,则可以进行近似处理:cosθ=−1,sinθ=−ɸ,(dθdt )2=0。
用u来代表被控对象的输入力F,线性化后的两个运动方程如下:{(I+ml2)ɸ−mglɸ=mlẍ(M+m)ẍ+bẋ−mlɸ=u(1-9)假设初始条件为0,则对式(1-9)进行拉普拉斯变换,可以得到:{(I+ml2)Φ(s)s2−mglΦ(s)=mlX(s)s2(M+m)X(s)s2+bX(s)s−mlΦ(s)s2=U(s) (1-10) 由于输出为角度ɸ,求解方程组的第一个方程,可以得到:X(s)=[(I+ml2)ml −gs2]Φ(s) (1-11)或改写为:Φ(s)X(s)=mls2(I+ml2)s2−mgl(1-12)如果令v=ẍ,则有:Φ(s)V(s)=ml(I+ml2)s2−mgl(1-13)如果将上式代入方程组的第二个方程,可以得到:(M+m)[(I+ml2)ml −gs]Φ(s)s2+b[(I+ml2)ml+gs2]Φ(s)s−mlΦ(s)s2=U(s) (1-14) 整理后可得传递函数:Φ(s) U(s)=mlqs2s4+b(I+ml2)qs3−(M+m)mglqs2−bmglqs(1-15)其中q=[(M+m)(I+ml2)−(ml)2]假设系统状态空间方程为:X=AX+Buy=CX+Du (1-16) 方程组对ẍ,ɸ解代数方程,可以得到解如下:{ẋ=ẋẍ=−(I+ml2)bI(M+m)+Mml2ẋ+m2gl2I(M+m)+Mml2ɸ+(I+ml2)I(M+m)+Mml2uɸ=ɸɸ=−mlbI(M+m)+Mml2ẋ+mgl(M+m)I(M+m)+Mml2ɸ+mlI(M+m)+Mml2u(1-17)整理后可以得到系统状态空间方程:[ẋẍɸɸ]=[01000−(I+ml2)bI(M+m)+Mml2m2gl2I(M+m)+Mml200010−mlbI(M+m)+Mml2mgl(M+m)I(M+m)+Mml20][xẋɸɸ]+[(I+ml2)I(M+m)+Mml2mlI(M+m)+Mml2]uy=[xɸ]=[10000010][xẋɸɸ]+[0]u(1-18)由(1-9)的第一个方程为:(I+ml2)ɸ−mgl ɸ=mlẍ对于质量均匀分布的摆杆可以有:I=13ml2于是可以得到:(13ml2+ml2)ɸ−mgl ɸ=mlẍ化简可以得到:ɸ=3g4l ɸ+34lẍ(1-19)设X={x, ẋ, ɸ , ɸ},u=ẍ则有:[ẋẍɸɸ]=[010000000001003g4l0][xẋɸɸ]+[134l]uy=[xɸ]=[10000010][xẋɸɸ]+[0]u(1-20)以上公式推理是根据牛顿力学的微分方程验证的。
小车倒立摆
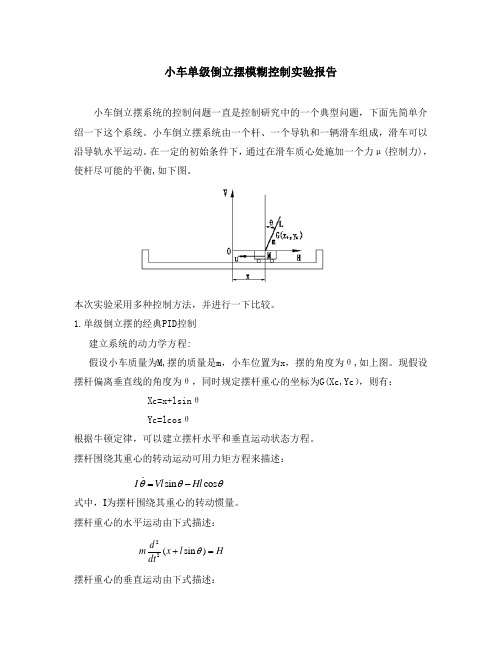
小车单级倒立摆模糊控制实验报告小车倒立摆系统的控制问题一直是控制研究中的一个典型问题,下面先简单介绍一下这个系统。
小车倒立摆系统由一个杆、一个导轨和一辆滑车组成,滑车可以沿导轨水平运动。
在一定的初始条件下,通过在滑车质心处施加一个力μ(控制力),使杆尽可能的平衡,如下图。
本次实验采用多种控制方法,并进行一下比较。
1.单级倒立摆的经典PID 控制 建立系统的动力学方程:假设小车质量为M,摆的质量是m ,小车位置为x ,摆的角度为θ,如上图。
现假设摆杆偏离垂直线的角度为θ,同时规定摆杆重心的坐标为G(Xc,Yc ),则有: Xc=x+lsin θ Yc=lcos θ根据牛顿定律,可以建立摆杆水平和垂直运动状态方程。
摆杆围绕其重心的转动运动可用力矩方程来描述: ..sin cos I Vl Hl θθθ=- 式中,I 为摆杆围绕其重心的转动惯量。
摆杆重心的水平运动由下式描述:22(sin )d m x l Hdt θ+=摆杆重心的垂直运动由下式描述:22cos d m l V mgdt θ=-小车的水平运动由下式描述:22d xm u Hdt =-假设θ很小,sin θ≈θ,cos θ≈1。
则以上各式变为: ..I Vl Hl θθ=- 1.1 ....()m x l H θ+= 1.2 0V mg =- 1.3 ..M x u H =- 1.4 由式1.2和1.4得:....()M m x ml u θ++= 1.5 由式1.2和1.3得:....2()I ml ml x mgl θθ++= 1.6 由1.5和1.6可得单级倒立摆方程:..22()()()m m M gl mlu m M I Mml m M I Mml θθ+=-++++222..22()()m gl I ml x u m M I Mml m M I Mml θ+=-++++ 式中,2112I mL =, l=0.5L .控制指标共有四个,即单级倒立摆的摆角θ、摆速.θ,小车位置x 和小车速度.x 。
一阶倒立摆控制系统设计matlab
一阶倒立摆控制系统设计matlab一、控制系统简介控制系统是指通过对某些物理系统或过程的改变以获取期望输出或行为的一种系统。
其中涉及到了对系统的建模、分析以及控制方法的选择和设计等多方面的问题。
控制系统可以通过标准的数学和物理模型来描述,并可以通过物理或者仿真实验进行验证。
本文将围绕一阶倒立摆控制系统设计和仿真展开。
主要内容包括:1.一阶倒立摆系统简介2.系统建模3.系统分析4.设计控制器5.仿真实验及结果分析一阶倒立摆(controlled inverted pendulum)是一种比较常见的控制系统模型。
它的系统模型简单,有利于系统学习和掌握。
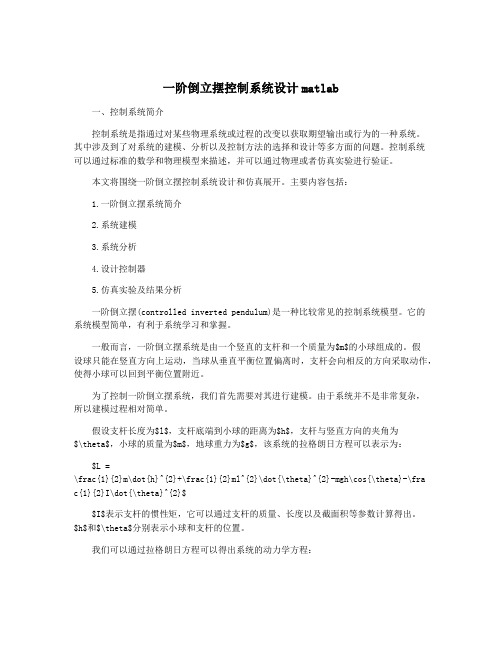
一般而言,一阶倒立摆系统是由一个竖直的支杆和一个质量为$m$的小球组成的。
假设球只能在竖直方向上运动,当球从垂直平衡位置偏离时,支杆会向相反的方向采取动作,使得小球可以回到平衡位置附近。
为了控制一阶倒立摆系统,我们首先需要对其进行建模。
由于系统并不是非常复杂,所以建模过程相对简单。
假设支杆长度为$l$,支杆底端到小球的距离为$h$,支杆与竖直方向的夹角为$\theta$,小球的质量为$m$,地球重力为$g$,该系统的拉格朗日方程可以表示为:$L =\frac{1}{2}m\dot{h}^{2}+\frac{1}{2}ml^{2}\dot{\theta}^{2}-mgh\cos{\theta}-\frac{1}{2}I\dot{\theta}^{2}$$I$表示支杆的惯性矩,它可以通过支杆的质量、长度以及截面积等参数计算得出。
$h$和$\theta$分别表示小球和支杆的位置。
我们可以通过拉格朗日方程可以得出系统的动力学方程:$b$表示摩擦系数,$f_{c}$表示对支杆的控制力。
由于一阶倒立摆会发生不稳定的倾斜运动,即未受到外部控制时会继续倾斜。
我们需要对系统加上控制力,使得系统保持在稳定的位置上。
在进行控制器设计之前,我们需要对系统进行分析,以便更好地了解系统在不同条件下的特性表现。
倒立摆系统技术报告

倒立摆系统的简介1.1.1倒立摆系统的研究背景及意义倒立摆系统的最初分析研究开始于二十世纪五十年代,是一个比较复杂的不稳定、多变量、带有非线性和强耦合特性的高阶机械系统,它的稳定控制是控制理论应用的一个典型范例。
倒立摆系统存在严重的不确定性,一方面是系统的参数的不确定性,一方面是系统的受到不确定因素的干扰。
通过对它的研究不仅可以解决控制中的理论问题,还将控制理论涉及的相关主要学科:机械、力学、数学、电学和计算机等综合应用。
在多种控制理论与方法的研究和应用中,特别是在工程中,存在一种可行性的实验问题,将其理论和方法得到有效的验证,倒立摆系统可以此提供一个从控制理论通过实践的桥梁。
近些年来,国内外不少专家、学者一直将它视为典型的研究对象,提出了很多控制方案,对倒立摆系统的稳定性和镇定问题进行了大量研究,都在试图寻找不同的控制方法实现对倒立摆的控制,以便检查或说明该方法的严重非线性和绝对不稳定系统的控制能力,其控制方法在军工、航天、机械人领域和一般工业过程中都有着广泛的用途,如精密仪器的加工、机器人行走过程中的平衡控制、火箭发射中的垂直度控制、导弹拦截控制、航空对接控制、卫星飞行中的姿态控制等方面均涉及到倒置问题。
因此,从控制这个角度上讲,对倒立摆的研究在理论和方法论上均有着深远意义。
倒立摆系统是一个典型的自不稳定系统,其中摆作为一个典型的振动和运动问题,可以抽象为许多问题来研究。
随着非线性科学的发展,以前的采用线性化方法来描述非线性的性质,固然无可非议,但这种方法是很有局限性,非线性的一些本质特征往往不是用线性的方法所能体现的。
非线性是造成混乱、无序或混沌的核心因素,造成混乱、无序或混沌并不意味着需要复杂的原因,简单的非线性就会产生非常的混乱、无序或混沌。
在倒立摆系统中含有极其丰富和复杂的动力学行为,如分叉、分形和混沌动力学,这方面的问题也值得去探讨和研究。
无论哪种类型的倒立摆系统都具有如下特性:(1)非线性倒立摆是一个典型的非线性复杂系统。
单级倒立摆系统的分析与设计
单级倒立摆系统的分析与设计小组成员:武锦张东瀛杨姣李邦志胡友辉一.倒立摆系统简介倒立摆系统是一个典型的高阶次、多变量、不稳定和强耦合的非线性系统。
由于它的行为与火箭飞行以及两足机器人行走有很大的相似性,因而对其研究具有重大的理论和实践意义。
由于倒立摆系统本身所具有的上述特点,使它成为人们深入学习、研究和证实各种控制理论有效性的实验系统。
单级倒立摆系统(Simple Inverted Pendulum System)是一种广泛应用的物理模型,其结构和飞机着陆、火箭飞行及机器人的关节运动等有很多相似之处,因而对倒立摆系统平衡的控制方法在航空及机器人等领域有着广泛的用途,倒立摆控制理论产生的方法和技术将在半导体及精密仪器加工、机器入技术、导弹拦截控制系统、航空器对接控制技术等方面具有广阔的开发利用前景。
倒立摆仿真或实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案。
最初研究开始于二十世纪50年代,单级倒立摆可以看作是一个火箭模型,相比之下二阶倒立摆就复杂得多。
1972年,Sturgen等采用线性模拟电路实现了对二级倒立摆的控制。
目前,一级倒立摆控制的仿真或实物系统已广泛用于教学。
二.系统建模1.单级倒立摆系统的物理模型图1:单级倒立摆系统的物理模型单级倒立摆系统是如下的物理模型:在惯性参考系下的光滑水平平面上,放置一个可以在平行于纸面方向左右自由移动的小车(cart ),一根刚性的摆杆(pendulum leg )通过其末端的一个不计摩擦的固定连接点(flex Joint )与小车相连构成一个倒立摆。
倒立摆和小车共同构成了单级倒立摆系统。
倒立摆可以在平行于纸面180°的范围内自由摆动。
倒立摆控制系统的目的是使倒立摆在外力的摄动下摆杆仍然保持竖直向上状态。
在小车静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆受到微小的摄动时就会发生不可逆转的破坏而使倒立摆无法复位,这时必须使小车在平行于纸面的方向通过位移产生相应的加速度。
基于频域响应法直线一级倒立摆系统设计
基于频域响应法直线一级倒立摆系统的设计【摘要】:倒立摆系统具有高阶次、不稳定、多变量、非线性和强耦合特性,运用频域响应法对直线一级倒立摆进行了控制器设计,仿真及实控曲线表明,控制器的设计是正确、可行的。
【关键词】:倒立摆频域响应控制器引言倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来,通过倒立摆系统实验来验证所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。
1、直线一级倒立摆的性能分析直线一级倒立摆系统的传递函数:倒立摆的开环传递函数为:未校正系统的nyquist图如图2:matlab中的m文件如下:num=[0.02725]den=[0.0102125 0 -0.26705]nyquist(num,den)开环传递函数在s 右半平面有一个极点,图1的奈奎斯特图并没有逆时针绕-1 点一圈,因此系统不稳定。
2、控制器设计加控制器后系统的方框图如图2。
为了使系统稳定,需添加控制器。
2.1设计方法(1)首先通过控制器引入一个积分环节,使得原点处的零点被对消掉,原点处共有两个零点和两个极点了,曲线如图3。
图3中nyquist曲线顺时针方向绕-1点一圈,右半平面仍有两个极点,则需要增加相位使曲线逆时针绕-1点一周,增加零点可以增加相位。
(2)给控制器增加一个位于-1点的零点,如图4。
从图4可以看出,相位仍然不够,绕-1的曲线还是顺时针方向的。
(3)增加第二个零点,使得图形成为图5:从图5可以看出,nyquist曲线仍然是顺时针绕-1点。
(4)增加增益的方法,使得nyquist曲线被向左侧拉伸,最终使曲线逆时针方向的圆圈围绕-1点。
得到图6:图6中nyquist曲线逆时针绕-1点一圈,系统是稳定的。
然而如果要求系统的稳定时间小于5秒,则现有控制器不满足性能指标要求。
直线一级倒立摆实验报告
Gs KDs2 KPs KI
s
相当于给系统增加了一个位于原点的开环极点和两个位置可变的开环零点,因此 对于低阶已知数学模型的系统,根据期望的性能指标可以采用根轨迹法确定PID 参数。
2、频域法确定PID参数 对于已知频率特性曲线的系统,PID控制器相当于 给频率特性曲线增加了积分环节和一个二阶微分环节,通过调整PID参数,可以 改变PID控制器的频率特性,进而改变闭环系统的频率特性。
当摆杆被控时,小车的运动的位移也受到导轨实际长度的限制。因此,输出量除 了摆杆角度外,还有一个小车运动的位移。位移与输入量小车加速度之间的关系 为:
X (s) 1
Rs s2
控制系统结构图:
1
s2
Transfer Fcn1
Pos
3
In1 Out1
Step
s2+-29.4
Addห้องสมุดไป่ตู้
Transfer Fcn
Step 0.08
0.06
0.04
0.02
0
0
1
2
3
4
5
6
7
8
9
10
Pos.
0
-2
-4
0
1
2
3
4
5
6
7
8
9
10
Ang.
4
3
2
1
0
0
1
2
3
4
5
6
7
8
9
10
由曲线可以看出,系统角度超调量为33.6%,调整时间接近0.55秒,位移变化平 稳,角度输出稳定。故这组参数可以作为PID控制参数;
2、基于计算机MATLAB 平台进行现场倒立摆控制,绘制实验曲线; 直线一级倒立摆系统是小车在光滑的导轨上运动,小车上铰链了一根摆杆,
基于MATLAB的单级倒立摆系统研究
【=C +Du v x
图 1
其中 ,为状态 向量 ,i x 为状态向量对时间 的微分 , 为输出向量 , y u
图2
为输入或 控制 向量 , A为系统矩 阵 , B为输入矩阵 , C为输 出矩阵 , D为 前 向反馈矩阵。
2单级倒立摆系统的控制方法分析 . 21倒立摆系统的 PD控制方法 . I
(,,,) ( )一 x ABQR , K= K 。 u 2 倒立摆 系统 的模糊控制 . 3 模糊控制是以模 糊集合论 、模糊语言变量及模糊逻辑 推理 为基础 的计算机智能控 制。 模糊控 制的核心部分是模糊控制器, 其实现主要包 括3 个部分, 模糊化 、 即: 模糊推理 、 解模糊化 。 在倒立摆 系统 的控制 中,
的原理如图 Βιβλιοθήκη 所示 。 2 倒立摆 系统 的 L R控制方法 . 2 Q
二次最优调节器 ( Q 针对状态方程 := x B , L R1 是 x A + u 通过确定最佳
控制量 ut K (使得 控制性能 指标达 到极小 。其 中 Q为正定( (一 x) ) t 或半 正定 ) 厄米 特或实对称矩 阵 , R为正 定厄米特或实对 阵矩阵 , Q和 R分 别 表示对状态变量和输入变量的加权值 。 Q L R控制器 的增益 为 K L R =Q
单级倒立摆 系统的控 制性能进行 了仿真分析。 [ 关键词 ] 单级倒立摆 控制 系统 MA L T ̄ 仿真
0引 言 .
单级倒立摆系统是一个典 型多变 量 、不稳定和强耦合 的非线性 系 统。 对于单级倒立摆系统, 目前已有多种控制方法可对其实现稳摆控制。 典型的有线性 PD控制 、 I 常规 PD控制 、 Q I L R控制 、 智能控制等 。 倒立摆 的控制方法在军工 、 航天 、 机器人领域 和一般工业过程 中都有 着广 泛的 用途 , 如机器人行走过程 中的平衡控 制 、 火箭发射 中的垂直 度控制和卫 星飞行中的姿态控制等 。对倒立摆 系统的研究能有效地反 映控制中的 许多典型问题 , 如非线性问题 、 鲁棒性 问题 、 随动 问题 以及跟踪 问题等。 因此倒立 摆系统通 常用来检验 控制策略 的效果, 是控 制理 论研究 中较
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单级倒立摆系统的分析与设计小组成员:武锦张东瀛杨姣李邦志胡友辉一.倒立摆系统简介倒立摆系统是一个典型的高阶次、多变量、不稳定和强耦合的非线性系统。
由于它的行为与火箭飞行以及两足机器人行走有很大的相似性,因而对其研究具有重大的理论和实践意义。
由于倒立摆系统本身所具有的上述特点,使它成为人们深入学习、研究和证实各种控制理论有效性的实验系统。
单级倒立摆系统(Simple Inverted Pendulum System)是一种广泛应用的物理模型,其结构和飞机着陆、火箭飞行及机器人的关节运动等有很多相似之处,因而对倒立摆系统平衡的控制方法在航空及机器人等领域有着广泛的用途,倒立摆控制理论产生的方法和技术将在半导体及精密仪器加工、机器入技术、导弹拦截控制系统、航空器对接控制技术等方面具有广阔的开发利用前景。
倒立摆仿真或实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案。
最初研究开始于二十世纪50年代,单级倒立摆可以看作是一个火箭模型,相比之下二阶倒立摆就复杂得多。
1972年,Sturgen等采用线性模拟电路实现了对二级倒立摆的控制。
目前,一级倒立摆控制的仿真或实物系统已广泛用于教学。
二.系统建模1.单级倒立摆系统的物理模型图1:单级倒立摆系统的物理模型单级倒立摆系统是如下的物理模型:在惯性参考系下的光滑水平平面上,放置一个可以在平行于纸面方向左右自由移动的小车(cart ),一根刚性的摆杆(pendulum leg )通过其末端的一个不计摩擦的固定连接点(flex Joint )与小车相连构成一个倒立摆。
倒立摆和小车共同构成了单级倒立摆系统。
倒立摆可以在平行于纸面180°的范围内自由摆动。
倒立摆控制系统的目的是使倒立摆在外力的摄动下摆杆仍然保持竖直向上状态。
在小车静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆受到微小的摄动时就会发生不可逆转的破坏而使倒立摆无法复位,这时必须使小车在平行于纸面的方向通过位移产生相应的加速度。
依照惯性参考系下的牛顿力学原理,作用力与物体位移对时间的二阶导数存在线性关系,单级倒立摆系统是一个非线性系统。
各个参数的物理意义为:M — 小车的质量 m — 倒立摆的质量F — 作用到小车上的水平驱动力L — 倒立摆的长度 x — 小车的位置 θ— 某一时刻摆角整个倒立摆系统就受到重力、驱动力和摩擦阻力的三个外力的共同作用。
这里,驱动力F 是由连接小车的传动装置提供,控制倒立摆的稳定实际上就是依靠控制驱动力F 使小车在水平面上做与倒立摆运动相关的特定运动。
为了简化模型以利于仿真,假设小车与导轨以及摆杆与小车铰链之间的摩擦均为0。
2.单级倒立摆系统的数学模型令小车的水平位移为x ,运动速度为v ,加速度a 。
小车的动能为212kc E Mx =,选择特定的参考平面使得小车的势能为0。
摆杆的长度为L ,某时刻摆角为θ,在摆杆上与固定连接点距离为q (0<q<l )的位置处取一质量为△m 的质元,则有sin cos m m x x q y q θθ=+⎧⎨=⎩ 该质元的动能为:2222211()(2cos )22km m m E m x y m x q x q θθθ=+=++ 势能为:cos p m E m g q θ=⋅⋅ , 其中 m dq ρ=⋅,ρ是摆杆的线密度 则系统的总动能可以通过对和从0到L 积分获得:2220111()cos 226lk kc k m E E E dq M m x ml x ml θθθ=+=+++⎰ 01cos 2l p p m E E dq mgl θ==⎰ 其中小车的动能和势能为: 212kc E Mx = , 0pc E = 系统的拉格朗日方程可写为:2221111()cos cos 2262k p L E E M m x ml x ml mgl θθθθ=-=+++- 由欧拉—拉格朗日方程: d L L F dt x x ∂∂-=∂∂ , 0d L L dt θθ∂∂-=∂∂ 可以确定摆杆的运动方程: 211222111232()cos sin cos sin 0m M x ml ml F ml x ml mgl θθθθθθθ⎧++⋅-⋅=⎪⎨+-=⎪⎩为避免复杂的求解微分方程的运算,考虑摆角在θ=0附近的微小变化,倒立摆在垂直位置可以近似为:cos θ≈1,sin θ≈0,运动方程可简化为:1221132()()()0m M x ml F t ml ml x g θθθ⎧++=⎪⇒⎨+-=⎪⎩ 令所有作用力、位移与角度参数为时间t 的函数,则2()[()()]t F t m M x mlθ=-+ 2[()()]()032l ml F t m M x x g θ-++-= ∴ 43()()44mg x F t t m M m M θ=-++ 22()43()[()()]44m M mg F t F t t ml ml m M m M θθ+=--++ 66()()()(4)(4)g m M F t t l m M l m M θ+=-+++ 将转换后的线性系统用两个2阶微分方程描述,系统的状态矢量为:令(,,,),()T x x x f F t θθ== ,则状态方程描述为: x Ax Bf y Cx=+⎧⎨=⎩ 将相关参数带入,得到010006()6000(4)(4)()000103400044g m M l m M l m M f t x x mgm M m M ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥++⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎢⎥⎢⎥++⎣⎦⎣⎦01006()000(4)000130004g m M l m M A mgm M ⎡⎤⎢⎥+⎢⎥+⎢⎥=⎢⎥⎢⎥⎢⎥-⎢⎥+⎣⎦ 06(4)044l m M B m M ⎡⎤⎢⎥⎢⎥-+⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦10000010C ⎡⎤=⎢⎥⎣⎦三. 控制对象的初步分析倒立摆系统的基本数据:M ——小车质量2Kgm ——摆杆质量0.5KgL ——摆杆长度 0.5m得到系统的状态方程如下:100034.5882000 1.4118000101.72940000.4706u x x x x θ⎡⎤θ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥θ-θ⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦10000010y x x x θθθ⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦由状态方程可知,系统的开环特征值为:开环系统有极点在右半平面,因此原系统为不稳定系统。
由能控性的定义,根据状态方程x Ax Bu =+^2^3S=[B AB A B A B],rank(S)=4,满秩,所以系统完全能控;由能观性的定义,^2^3T P=[C CA CA CA ],rank(P)=4,满秩,所以系统完全能观。
四.控制器的设计1.控制方案的选取经典控制理论主要采用频域分析方法,能够很好地解决单输入单输出问题。
单级倒立摆系统的控制对象是一个单输入(力)两输出(角度和位移)的非最小相位系统。
根据对系统的力学分析,应用牛顿第二定律,建立小车在水平方向运动和摆杆旋转运动的方程,并进行线性化,拉氏变换,得出传递函数,从而得到零、极点分布情况。
为使闭环系统能稳定工作,需引入适当的反馈,使闭环系统特征方程的根都位于左平面上。
用经典控制理论的频域分析法设计非最小相位系统的控制器不需要十分精确的对象数学模型。
因为只要控制器使系统具有充分大的相位裕量,就能获得系统参数很宽范围内的稳定性。
与经典控制理论相比,现代控制理论有较强的系统性,从分析到设计、综合都有比较完整的理论和方法。
以单级倒立摆为例,这是一个多变量系统,应用最优状态调节器理论和状态观测器理论的控制思想,控制器采用线性定常状态反馈和观测器的结构。
控制对象(小车、摆杆)分别由传感器检测出两个位置量,然后由观测器重构系统状态,通过状态反馈,组成一个闭环系统,使不稳定系统变为稳定系统,系统的瞬态和静态性能良好。
此外,很多文献介绍了基于输出反馈的PID控制系统,但其控制效果不理想,主要原因是系统的高阶次和多变量。
以及基于模糊神经网络的倒立摆控制系统,该方法由于模糊神经网络系统的自适应能力,有效地克服了系统存在的非线性和不确定性,但该方法过分依赖人直接控制被控对象的经验。
这里我们结合《最优控制》课程的学习,选用基于状态空间设计法的LQR 最优调节器,较好地兼顾了系统的稳定性和快速性,应用实例说明了该方法的有效性。
对倒立摆系统进行控制的目的是:(1)通过状态反馈变不稳定系统为稳定系统;(2)使系统的瞬态和静态性能良好,系统的调节过程迅速,振荡不要太大。
由前面的分析可知,单级倒立摆系统是不稳定的,但系统的状态是完全可控和可观的。
根据线性系统控制理论,倒立摆经过适当的状态反馈后,所得到的闭环系统是可以稳定的,并且反馈所需的全部状态可以用状态观测器重构。
具体选择控制器方案时要考虑:在保证达到上述控制目标的前提下,控制器的设计和结构尽可能简单,容易实现。
控制器设计方案如下:(1) 应用确定性系统的控制理论,该系统为确定性系统;(2) 控制规律采用线性定常状态反馈,反馈增益由LQR 调节器理论算出;(3) 采用状态观测器重构系统状态。
2.最优调节器设计线性定常系统的状态反馈增益可由闭环系统的极点配置来确定,也可由最优控制理论计算获得,这里采用后一种方法。
单级倒立摆控制对象模型是一个单输入、双输出系统,它的状态方程为: x Ax Bu =+设状态反馈调节器的形式为u(k)=-K x(k),1T K R B P -=通过使性能指标函数T T 0J=x (k)Qx(k)+u (k)Ru(k)∞⎰ 为最小,其中,(1) Q 为4*4对称半正定矩阵,R 是标量,R>0(2) 矩阵P 是Riccati 代数方程10T T PA A P PBR B P Q -+-+=的唯一正定解。
图2:最优调节器设计3.状态观测器的设计采用状态反馈可以更好地改善系统的动态性能指标,然而在实际的控制系统中,并不是所有的状态变量都能够方便测量。
龙伯格状态观测器利用控制对象杜输入变量u 和输出变量y 对系统的状态变量x 进行估计,从而解决某些状态变量不能直接测量的问题,为实现状态反馈提供了可能性。
龙伯格状态观测器的状态方程为:(*)x A G C x Bu Gy =-++式中,u ,y 是系统可测量的输入与输出x 是待观测杜状态变量的估计值可见,观测器的实现,关键是确定未知矩阵G已验证系统是完全能观的,故先化为能观标准型,再进行设计。
按照状态观测理论,求得矩阵G =0033.58820001.72941⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦图3:观测器结构子图4.二次型性能指标中加权矩阵Q,R 的选择考虑简单情形,把对状态偏差的加权矩阵Q 选为对角矩阵,1234i Q=diag(q ,q ,q ,q ),q 0≥i q 表示对状态i x 平方的加权,i q 越大表示i x 的偏差在性能指标中占的比重越大,为使倒立摆稳定,认为摆杆的偏差比小车的偏差影响要小,加权系数取小些。