自适应神经模糊推理系统及其仿真应用
基于自适应神经模糊推理的形变数据仿真计算
维普资讯
基 于 自适应神 经模糊 推理的形变数 据仿真计算
陈继 光 祝令 德 孙 立堂 ( 东大学土 建与水 利 学院 , 南 20 6 ) 山 济 50 1
!南水北 调 东线 山 东干 线有 限公 司 , ( 济南 2 0 1 ) 5 0 3
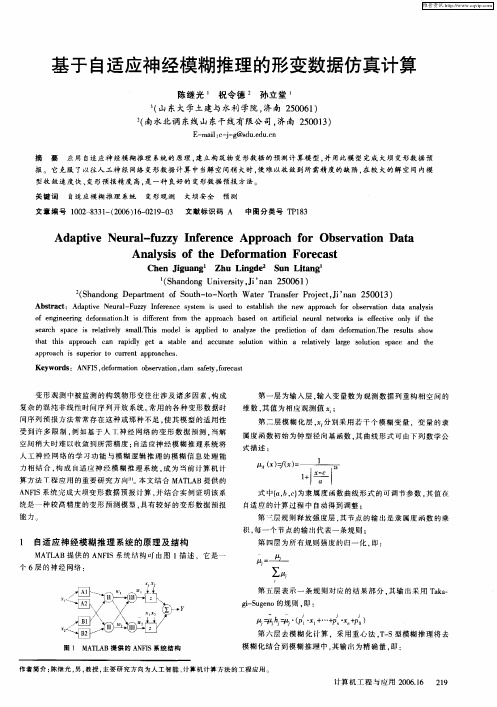
E m i: jg sueuc — al -- @ d . . c d n 摘 要 应 用 自适 应 神 经 模 糊推 理 系 统 的原 理 , 立构 筑物 变形 数 据 的 预 测计 算模 型 , 用此 模 型 完 成 大 坝 变形 数 据 预 建 并 报 。 它 克服 了 以往 人 工 神 经 网络 变形 数 据 计 算 中 当解 空 间 稍 大 时 , 难 以 收敛 到 所 需精 度 的 缺 陷 , 较 大 的解 空 间 内模 便 在
应用自适应神经模糊推理系统(ANFIS)进行建模与仿真
‘
- f: t t
一 qy+ t
=
+i f it
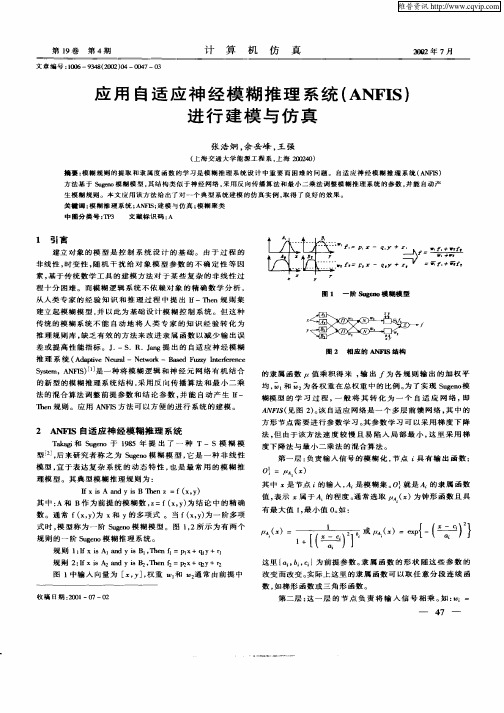
建 立 起 模 糊 模 型 , 以 此 为 基 础 设 计 模 糊 控 制 系 统 。 但 这 种 并 传 统 的 模 糊 系 统 不 能 自 动 地 将 人 类 专 家 的 知 识 经 验 转 化 为 推理 规 则库 , 乏 有 效 的方法 来 改进 隶 属 函数 以减 少 输 出误 缺 差 或 提 高 性 能 指 标 。 J 一S . .R. ag提 出 的 自适 应 神 经 模 糊 Jn
A I ( 图 2 。 自适应 网络 是一 个 多层 前 馈 网 络 , 中 的 NFS 见 )该 其
方 形节 点需 要 进行 参数 学 习 。 参数 学 习 可 以采 用 梯度 下 降 其 法 , 由于该 方法 速 度 较 慢 且 易 陷 入 局 部 最 小 , 里 采 用 梯 但 这 度 下 降法 与最 小二 乘 法 的混合 算法 。 第 一层 : 责输 入信 号 的模 糊 化 , 点 i 有输 出 函数 : 负 节 具
第 l卷 第4 9 期
文 章 编 号 :0 6—9 4 (0 2  ̄ 一0 4 10 3 S 20 ) 0 7—0 3
计
算
机
仿
真
加。 年 7 2 月
应 用 自适 应 神 经 模 糊 推 理 系统 ( ANF S I) 进 行 建 模 与 仿 真
张 浩 炯 , 岳 峰 , 强 余 王
推 理 系 统 ( d p v er — N tok— B sd F z t fr ̄e A at eN ua i l e r w ae uz I e ee ynr l
变量喷药自适应神经模糊控制器设计与仿真
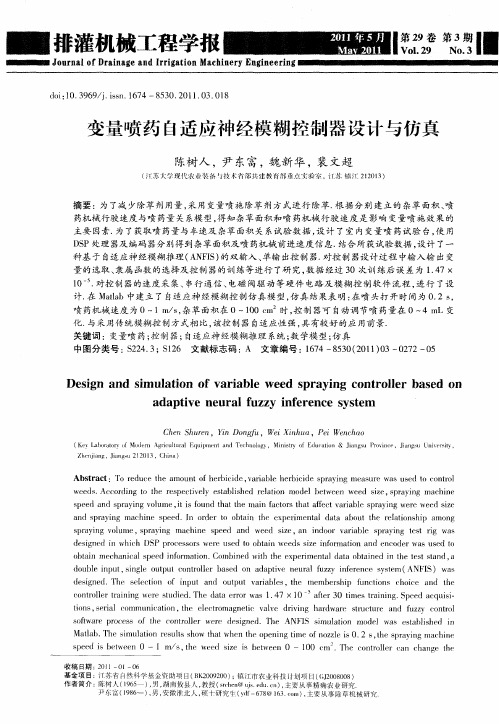
计. M t b中建 立 了 自适应神 经 模糊控 制仿 真模 型 , 真结 果表 明 : 喷 头打 开 时间为 0 2S 在 al a 仿 在 . ,
喷 药机械 速度 为 0~1m s杂 草面积 在 0~10e 时 , 制 器可 自动调 节喷 药量在 0~ L变 /, 0 m 控 4m 化. 与采 用传统模 糊控 制方式相 比 , 该控 制 器 自适应性 强 , 有较好 的应 用前景. 具 关键词 :变量啧 药; 制 器 ; 控 自适应神 经模糊推 理 系统 ; 学模 型 ; 真 数 仿 中图分 类号 : 2 4 3 S 2 文献标 志码 : ¥2 . ; 16 A 文章 编号 : 6 4— 5 0 2 1 ) 3— 2 2— 5 17 8 3 (0 1 0 0 7 0
变量 喷 药 自适 应神 经模 糊 控制 器 设计 与 仿真
陈树 人 , 东富 , 新 华 , 文超 尹 魏 裴
( 苏 大学 现 代农 、装 备 技 术省部 共 建 教 育部 重 点 实 验室 ,江 苏 镇 江 2 2 1 ) 汀 【 } , j 10 3
摘 要 :为 了减 少除草 剂用量 , 采用 变量喷施 除 草 剂方 式进 行 除草. 据分 别 建立 的 杂草 面积 、 根 喷 药机 械行驶 速度 与喷 药量 关 系模 型 , 得知 杂草 面积和 喷 药机械 行驶 速 度是 影 响 变量喷 施 效果 的 主要 因素. 了获取喷 药量与 车速及 杂草 面积 关 系试验数 据 , 为 设计 了 室 内变量喷 药试 验 台, 用 使 D P处理 器及 编码 器分别得 到杂草 面积及喷 药机械 前进速 度信 息. S 结合 所获试验 数据 , 计 了一 设
I 排灌机械工程学报
嗣 豳●翻 _— J u n l fD a n g n r ia i n Ma h n r g n e i g o r a r i a ea d I rg to c i e yEn i e rn o
模糊推理神经网络诊断模型案例
模糊推理神经网络诊断模型案例[摘要]本文基于通用神经网络的自适应性和诊断的建模方法,建立了一种新的故障诊断模型一模糊神经网络诊断模型,并对它的智能诊断机理和突出特点进行了深入分析。
最后,将该诊断模型应用于某大型汽轮发电机组故障诊断中,分析得出它具有明显的提高诊断精确度的优越性。
[关键词]神经网络故障诊断智能诊断1模糊推理神经网络诊断模型建立1.1通用网络模型自适应动态特性比较两类典型的神经网络一前向BP网络与反馈Hopfied网络,可以发现其核心是单层神经网络,则两类网络可以用一个通用神经网络模型来描述。
根据点集拓扑理论和人工神经网络空间概念,对这个通用神经网络模型的特征进行分析得出以下两个结论,证明从略。
定理1神经网络空间在紧集上的连续函数空间C上以及按L2范数在平方可积函数空间I上都是稠密的。
推论1由通用神经网络模型所生成的任何开集可以一致逼近紧集上的连续映射函数f∈C(Rn。
Rm)。
由推论1表明,通用网络模型所概括的任何开集(如BP网络、Hopfied网络、BAM网络)通过自学习都能一致逼近紧集上的连续映射函数f∈(Rn,Rm),因而具有良好的自学习、自适应动态特性。
1.2诊断建模方法设xjn(j=1,2,...,k)对应反映设备运行状态第n个观测样本的k个特征参数,yin,(i=1,2,...l)对应第n个样本的1种故障模式,共有N个样本xjn∈RN,yin∈RN,[n=1,2,...,N),则故障模式向量Y={yin,i=1,2,...,l}与特征参数向量x={xin,i=1,2,...,k}间的内在关系用函数P表示,有:X=P(Y)。
当N→∞时,函数P的逆函数存在,以函数S表示,有:Y=S(X)诊断问题建模的实质就是根据有限的样本集,确定函数S(X)的一等价映射关系SS(X),使得对于任意的ε>0,满足:|| S(X)-SS(X)||=||y-YY||0)=(Y0)x→x0则映射SS建立了诊断问题的数学模型。
高速列车横向振动自适应神经模糊控制的仿真
制、 预测 控制 、 糊 控 制 和 神 经 网络 控 制 等口 。对 于 这 模 ] 些 控制方 法 , 都有 自己的优缺 点 。就 模糊 控 制 和神经 网
络控制 来说 , 模糊 控 制 的缺 点是 控 制 精度 低 、 控制 规 则 难 建立 , 当控制规 则 确 定 后 又不 会 改 变 , 就 导致 了模 这
高速 列车 横 向振 动 自适 应神 经模 糊 控 制 的仿真
成 新 明 , 启 志 唐
( 中南大 学 信 息科 学 与工 程 学院 ,湖南长 沙 4 0 8 ) 1 0 3
摘 要 为 了设 计 出智 能 的列 车 悬 挂 系 统 , 出 了基 于 神 经 网 络 的 自适 应 模 糊 控 制 。模 糊 控 制 主 要 是 针 对 系 统 的 提
网络 是 对 动 态 采 集 的 数 据 进 行 训 练 , 训 练 过 程 中不 断 在
局部 相对 运动 有关 , 且其悬 挂特 性在 车辆 运行 过 程 中不 能 随激励 的变化而 任意进 行调 整 , 就 限制 了机 车 车辆 这
调 节模糊 控 制 的控 制 参 数 , 而 来改 变控 制 规 则 , 从 使控 制规则 能够随着路 面的变化而 变化 。这 种设 计不 仅可 以 减少列 车 的振动 , 而且 还 能适 应模 型建 立 不 精 确 、 感 传 器 测量不 准确 等情 况 , 断提 高控制 器 的 自适应 能力 。 不
性。
关键词
横 向 振 动 ;模 糊 控 制 ; 经 网络 ; 主 动 悬 挂 神 半
文 献 标 志 码 :A d i1 . 9 9 j is . 0 8 7 4 . 0 2 0 . 3 o :0 3 6 /.s n 1 0 — 8 2 2 1 . 5 0
基于自适应神经模糊推理系统的磁悬浮电动机控制
研究与应用化工自动化及仪表,2009,36(5):88—9lC ont r o l a nd I nst r um ent s i n C h em i ca l I ndust r y基于自适应神经模糊推理系统的磁悬浮电动机控制李惠光,张广路,周巧玲,杨国良(燕山大学电气工程学院,河北秦皇岛066004)摘要:磁悬浮电动机是一个非线性、强耦合的复杂系统。
阐述了它的工作原理并建立了数学模型,为使该系统具有良好的动态性能和稳定性,采用逆系统方法解耦线性化,然后以解耦后的伪线性子系统为对象,设计了神经模糊PI D控制器,该控制器利用PID算法实现控制的准确性,利用模糊控制的逻辑能力和神经网络的自学习能力来提高控制的快速性和自适应性。
仿真结果表明。
采用神经模糊P I D控制响应快、无超调、过渡时间短,实现了预期目的。
关键词:磁悬浮;解耦线性化;自适应神经模糊推理系统;神经模糊PI D中图分类号:T P273文献标识码:A文章编号:1000-3932(2009)05-0088-04l引言磁悬浮电动机因其体积小、临界转速高等优点已成为电磁轴承研究中的前沿课题。
但是,由于磁悬浮电动机系统的非线性和强耦合性,制约了其发展和应用的速度。
要实现磁悬浮电动机的稳定悬浮和可控旋转,必须对径向二自由度悬浮力之间进行动态解耦,并且需要对悬浮力、转矩、转子磁链之间进行线性化解耦。
近年来,智能控制的广泛应用为复杂的非线性系统提供了解决办法¨二1,国内的研究尚处于理论阶段。
本文应用非线性系统状态反馈解耦理论挣,实现了磁悬浮电动机的转矩、转子磁链、转子位置之间的动态解耦,并在此基础上设计了神经模糊PID控制器,该控制器利用模糊逻辑的“概念”能力和神经网络的自学习能力,通过两者的有机结合寻找最佳的P、I、D非线性组合控制规律,实现了对被控对象的在线控制,有效地解决了常规PI D控制器设计过程依赖于对象精确的数学模型且不能调整PI D参数的缺点,有效地增加了系统悬浮偏移量调节的自适应力,提高了系统的性能。
基于MATLAB的自适应模糊PID控制系统计算机仿真
摘要: 在分析自适应模糊控制及 HIJ 参数变化对系统性能影响的基础上 K 提出在动态过程中对 HIJ 参数进行整定。 仿真研究表 明 K 控制质量得到了提高 。 关键词: 模糊 HIJ 控制; 自适应; 仿真 E19F1G; 中图分类号: 9HCB&$ B 文献标识码: 1
&
E19F1G 简介
E19F1G 软件于 &B?/ 年由美国的 E)82W",X7 公司推出 K 该软件使用简单、方便 。自 &BBC 年以来 K E)82W",X7 公司相继推出了 E19F1G /$ . 、 E19F1G /$ %、 E19F1GD$ %、 E19F1G <$ . 等版本。本文在 E19Z F1G<$ . 基础上 K 介绍如何利用 RIE4FI’[ 和 \4]]^ 工具箱构造某模糊控制系统的结构框图和进行仿真研 究的方法及步骤。 &$ & 模糊逻辑工具箱 模糊逻辑工具箱 @ 0+PP-#";3:8""#Q"_ A 提供了模糊逻辑控制器及系统设计的各种途径。工具箱提供了生成 和编辑模糊推理系统 @ \IR A 常用的工具函数 K 如 *6W037, )OO5),, )OOM0, )OO,+##6, 768037, W,386037 等 K 它包括了产
!"#$ %& ()*+),-
’"$ & %../
安徽工业大学学报 ($ "0 1*2+3 4*356,738- "0 96:2*"#";-
第 %& 卷 第 & 期 %../ 年 &月
4 自适应模糊控制-智能控制——理论基础、算法设计与应用-刘金琨-清华大学出版社

R x y B x i1i2 u
:如果
为 且 1
Ai1 1
2
为 Ai2 2
,则
为 i1i2
其中,i1 1, 2, , N1, i2 1, 2, , N2
将模糊集Bi1i2 的中心(用y i1i2 表示)选择为
y g e , e i1i2
i1
i2
1
2
(4.1)
步骤3:采用乘机推理机,单值模糊器和中心平
自适应模糊控制是指具有自适应学习算法的模糊逻辑系 统,其学习算法是依靠数据信息来调整模糊逻辑系统的参数。 一个自适应模糊控制器可以用一个单一的自适应模糊系统构 成,也可以用若干个自适应模糊系统构成。与传统的自适应 控制相比,自适应模糊控制的优越性在于它可以利用操作人 员提供的语言性模糊信息,而传统的自适应控制则不能。这 一点对具有高度不确定因素的系统尤其重要。
采用乘机推理机单值模糊器和中心平均解模糊器根据条规则来构造模糊系统42412模糊系统的逼近精度万能逼近定理表明模糊系统是除多项函数逼近器神经网络之外的一个新的万能逼近器
第4章 自适应模糊控制
模糊控制的突出优点是能够比较容易地将 人的控制经验溶入到控制器中,但若缺乏这样 的控制经验,很难设计出高水平的模糊控制器。 而且,由于模糊控制器采用了IF-THRN控制规 则,不便于控制参数的学习和调整,使得构造 具有自适应的模糊控制器较困难。
取控制律为
u
1 g(x)
f
x
y (n) m
ΚTe
(4.9)
将(4.9)代入(4.7),得到闭环控制系统的方程:
e(n) k e(n1) k e 0
1
n
(4.10)
由 的选取,可得 t 时 e(t) 0 ,即系统的输
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应神经模糊推理系统及其仿真应用
刘雨刚,耿立明,杨威
辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛(125105)
摘 要:本文介绍了自适应神经模糊推理系统的结构,以及如何用MATLAB 模糊工具箱提供的ANFIS 应用工具仿真,完成训练模糊神经网络。
关键词:自适应神经模糊推理系统,MATLAB ,模糊神经网络
0 引言
由Jyh-Shing R.Jang 提出的自适应神经模糊推理系统[1],是一种基于Takagi -Sugeno 模型的模糊推理系统(简称ANFIS )。
研究表明,当输入模糊集采用非梯形/非三角形的隶属函数时,Sugeno 型模糊系统需要的模糊规则及输入的模糊集的个数较少。
1 基于Takagi -Sugeno 模型的自适应神经模糊推理系统
所考虑的模糊推理系统有两输入和,单输出f 。
1x 2x 对于零阶T-S 模糊模型,模糊规则的第i 条规则有如下形式:
⑴ 后件为恒值:Ri : ),...,2,1( , 221121n i f y Then A x A x If i i i ==是和是
⑵ 后件为一阶线性方程:Ri :
0,1,2)(j ),( ,...,2,1 ),( , 221102*********是常数是和是=++===ij i i i i i i i a x a x a a x x f n
i x x f y Then A x A x If 式中,Ri 表示第i 条规则,Ai 表示模糊子集,即{NL ,NM ,NS ,ZO ,PS ,PM ,PL}={“负
大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”}。
在T-S 模型中,每条规则的结论部分是个线性方程,表示系统局部的线性输入/输出关系,而系统的总输入是所有线性子系统输出的加权平均,可以表示全局的非线性输入输出关系,所以,T-S 模型是一种对非线性系统局部线性化的描述方法,它具有非常重要的研究意义和广泛的应用范围[2]。
典型的单交叉路口东、南、西、北四个方向,每个方向均有右行、直行和左行三股车流。
依据各个车道的车流信息,以路口流通能力最大或排队候车的时间最短为目标,通过设计自适应神经模糊推理系统,对交叉路口交通信号进行控制,实时确定各个相位的配时,具体地
说每一相交通信号的配时e i (i=1,2,3,4)
由该相位的主队列w1、后继相的主队列w2两者确定,当前相的主队列起决定作用,后继相的主队列起调节作用。
所谓主队列是一个相位两个方向中车辆等待数较大的等待队列。
2 ANFIS 的结构
根据给出的模糊系统模型,输入为w1和w2,模糊标记取{负大,负中,负小,零,正小,正中,正大},由此可构造出一个具有模糊功能的神经网络,如图1所示的ANFIS 结构
图1 ANFIS 结构
由图1可以看出,输入w1和w2各自被送入一个前向人工神经网络,该网络的激活函数的形状即代表模糊隶属函数的形状,确定采用线性或指数型,分别对应模糊隶属函数的三角型和高斯型,输入层神经元的个数代表模糊标记数,通过调节输入层网络的权值和偏差,可以达到调节激活函数的宽度及其中心位置的目的。
各层的功能如下:
第1层:将输入变量x=[x,y]T 模糊化,输出对应模糊集的隶属度,这一层的每个节点i 是一个有节点函数的自适应节点,其中一个节点的传递函数可以表示为:
)()1(x u O i A i
= , i=1,2 式中为模糊集A 的隶属度,并且它确定了给定输入满足量A 的程度。
这里A 的
隶属度可以是任意合适的参数化隶属函数,根据所选择的隶属函数的形式,可以得到相应的参数集,称为条件参数。
如高斯隶属函数:
()1i O ()⎟⎟⎠⎞⎜⎜⎝
⎛−−=22exp i i i A c x x u σ 则条件参数集为所有
{}i i c ,σ的集合。
本层参数称为规则的前提部分参数。
第2层:实现条件部分的模糊集的运算,每个节点的输出对应每条规则的适用度,是所有输
入信号的乘积: ()()y u x u O Bi i A i i ×==ω2 ,i=1,2 第3层:对各条规则的适用度进行归一化处理。
213ωωωω+==i
i i O ,i=1,2
第4层:每个节点的传递函数为线性函数,表示局部的线性模型,计算出每条规则的输出:
())214
,x x f f O i i i i i ωω== ,i=1,2 第5层:计算所有规则的输出之和:
∑∑∑===i i
i
i i i i i f f f O ωωω5 ,i=1,2
模糊推理系统的参数学习可归结为对条件参数(非线性参数)的调整。
在采用神经网络实现模糊化、模糊推理和解模糊化过程中,为了运算简单,模糊神经网络系统采用的模糊推理方式是用乘积—求和代替模糊系统中常用的最小—最大推理法,且输出变量的隶属函数取单值型。
3 模糊神经网络结构的设计
利用MATLAB7.1环境中的模糊逻辑工具箱提供的ANFIS应用工具设计下面的自适应神经一模糊网络并进行初始化、学习和仿真。
3.1 系统生成流程,如图2所示。
图 2 系统生成流程
3.2模糊神经网络仿真过程和步骤
本文用Matlab软件中的模糊逻辑工具箱[3]进行仿真演示,控制系统生成过程主要有以下步聚:
(1)设置系统及其环境的各种参数;给出初始训练数据和检验数据根据所收集的样本数据进行模糊神经网络训练,确定各层的节点阀值及各层之间的连接权重,完成模糊神经网络的设计。
将选取的训练数据和检验数据分别写入两个.dat文件或在程序中直接写入。
训练数据为trnData=[…],检验数据chkData=[…],训练数据用于训练ANFIS,而检验数据仅用于验证ANFIS。
要使用ANFIS图形界面编辑器,可在命令行中键入“anfisedit”载入训练数据,检验数据。
如图3所示。
图 3 训练数据和检验数据
(2) 确定FNN的输入变量的隶属度函数的类型和数目,产生隶属函数个数和规则组数,构成ANFIS的初始网络结构
网络系统采用两输入、单输出的结构。
确定隶属函数个数为7个,规则数为49,隶属函数选为高斯型隶属函数,这样网络的前件确定后,可利用线性最小二乘法估计每条规则的方程即结论部分,由此得到一个初始FIS结构。
(3)进行神经网络的训练,设定ANFIS训练参数,选择训练时长和训练误差容忍限。
确定算法进行学习,训练ANFIS模型,经过一定步数得学习后将得到一个FNN的控制系统。
在训练中,设定epochs为160;error tolerance为0;算法为backpropa(反向传播算法),在训练中调整隶属函数并在图形区画出训练数据(或检验数据)误差图。
如图4所示。
图 4 训练数据(或检验数据)误差图
4 结束语
本篇文章只是通过一个简单的具体实例说明sugeno型模糊神经网络的应用情况,经过以上控制方案的仿真、分析,可以得知,对要实现的交通信号系统来说,模糊神经网络建模比常规方法有更快的收敛速度和较高的误差精度,模糊神经自适应控制策略有很好的控制性能,是一种行之有效的方法。
参考文献
[1]刘增良等.模糊逻辑与神经网络.北京:北京航空航天大学出版社.1996
[2]王士同等.神经模糊系统及其应用.北京:北京航空航天大学出版社.1998
[3]龚晓芳.MATLAB环境下的ANFIS仿真.全国计算机新科技与计算机继续教育论文集,2003:57~61.
Adaptive network based fuzzy inference system and
simulation application
Liu Yugang, Geng Liming, Yang Wei
Department of Electrical Engineering, Liaoning Technical University, Huludao,
China (123000)
Abstract
This article introduces the adaptive network based fuzzy inference system structure, as well as how to use the ANFIS application tool to simulate which is provided by the MATLAB fuzzy toolbox, to complete the training fuzzy neural network.
Keywords:adaptive network based fuzzy inference system;MATLAB;fuzzy neural network。