机械结构认识实验-报告

实验 机械结构认识实验 实验报告
一、实验目的
从整体和系统的两个角度来认识和了解机电产品的实际结构,掌握产品的设计原理,提高创新力、想像力和解决实际问题的能力;
二、实验要求
1、 首先了解创意模型的工件翻转机械手的工作原理。
2、 根据自己的设计思路在明确机器功能目标的基础上,进行相似实物考察、查阅相关资料,充分发挥想象力和创造力,构思出各动作的实现方法,处理好各动作间的时序关系,进行机器的方案选型设计。
3、 利用组装确定方案的实物模型,并检验是否实现预定的运动要求,从中发现问题,进行改进。
4、 通过电脑编程控制实物模型,实现设计要求的运动轨迹。
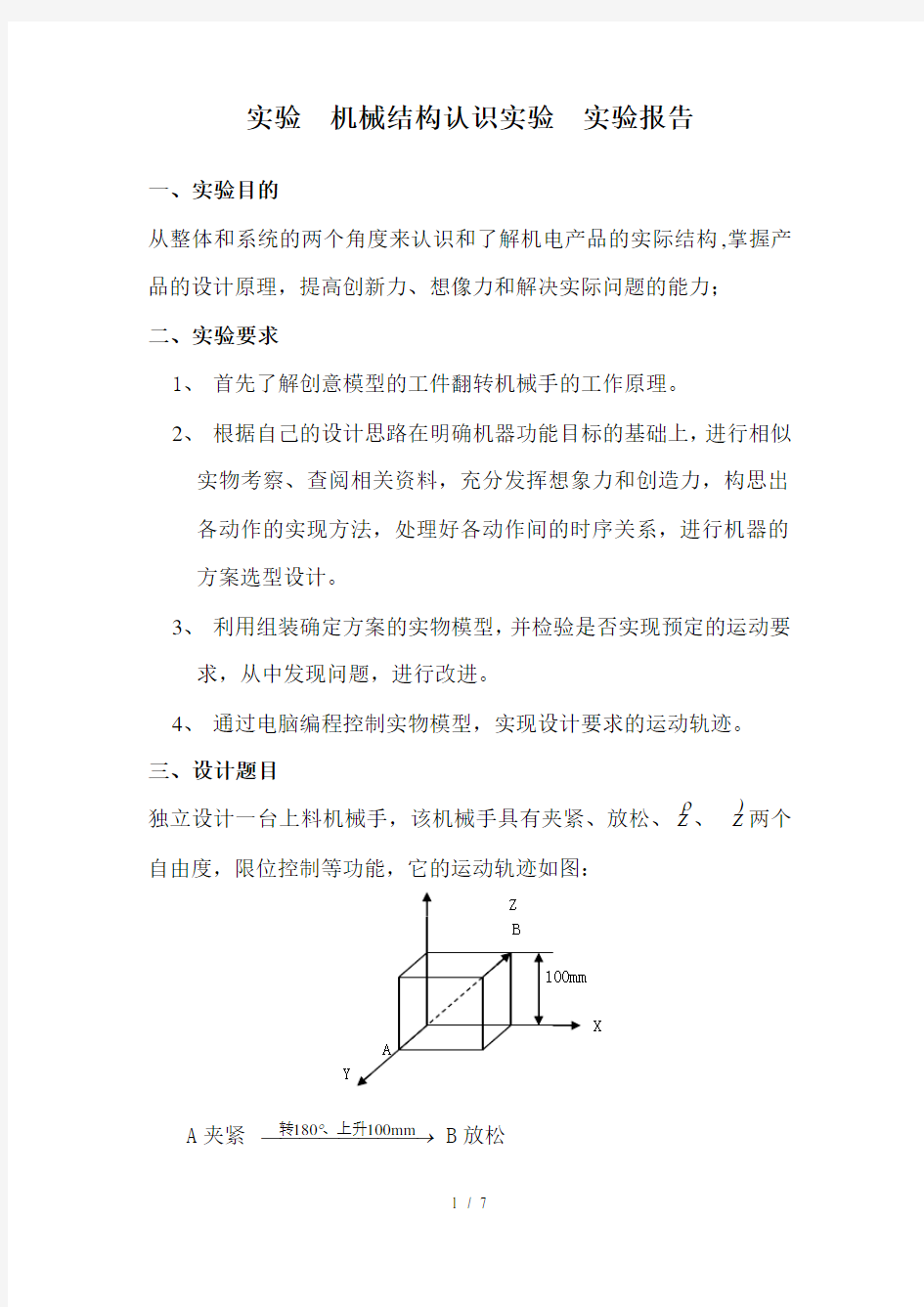
三、设计题目
独立设计一台上料机械手,该机械手具有夹紧、放松、Z 、Z 两个
自由度,限位控制等功能,它的运动轨迹如图:
A 夹紧 100mm 180、上升转
B 放松
设计要求:结构紧凑、合理、运动平稳。
四、方案拟定
1,使用蜗轮蜗杆结构,实现旋转运动,将其固定在Z轴上。2,使用蜗杆传动,带动螺纹套实现上下运动。
3,将具有夹紧,松开功能的机械手固定在螺纹套上。
4,设置各种传感器,实现数字化。
5,编写运动程序,实现指定路径的运动。
五、实验结果
1. 模型方案示意图
2. 搭接模型
3. 设计方案评述(就其是否满足设计要求作必要的说明)
该方案满足设计要求,运行科实现机械手在A处夹取物件,然后上升,旋转,并在B处松开,符合两个自由度的设计要求。而且该设计简单轻便,很好的解决了因机械臂过重而引起的马达动力不足问题。
4. 模型控制,编程流程图
5. 设计方案改进建议
机械手与螺纹套的衔接不太稳定,有时会出现松动,应该改进固定装置使其更加稳定,或者增加一个横向传动机构,多一个自由度可实现更多的功能,但还要增电机的动力,使其能提供足够的能量。还可以对程序进行调整,使其实现循环取物。
六、感想与体会
通过这个实验,我的动手能力得到了大大地提高,让我明白合作意识的重要性。不仅如此,这个实验让我对机械结构的各个组成部分都有了全新的认识以及了解他们的部分功能,以及对有些的机构能做到了正确的组合和应用,从模拟到实践,活学活用。我通过合作,与同实验者一起发现问题,解决问题,各方面的能力得到了极大地提高,为以后的更好的学习打下了基础。
建议:模拟的结构希望能尽可能的实现实际结构的功能,尤其是齿轮的啮合,这对模拟的效果有着至关重要的作用!