机械手手爪设计类型及其计算
机械手气动手爪的结构分析与选择
机械手气动手爪的结构分析与选择水利部信息研究所 吴淑英 在自动生产线中,各种型式的机械手应用越来越广泛。
现代的机械手采用各种电气、机械、液压、气动传动机构,并用电子系统进行控制,以实现模仿人的手臂和手指动作。
而其手爪的结构也是各式各样,但以气动手爪应用较为普遍。
1 气动手爪的优缺点 优点:(1)快速性。
气动手爪以压缩空气驱动,具有气压传动的优点,运动速度快,手爪的开闭时间短,工作频率可达100~180次 m in。
(2)体积小,重量轻。
由于采用铝合金等轻金属,并实现紧凑的设计,手爪机构一般重量在300~1500g之间。
(3)采用特殊密封结构,不必润滑。
(4)开闭动作均可用压缩空气驱动,工作压力可调,把持力稳定可靠。
(5)具有内部磁性发讯装置,手爪的开闭动作可以得到确认,提高工作可靠性。
(6)一般气动手爪机构都考虑在各个方向上可以安装,方便用户,并备有各种形状的手指,适应不同工件。
缺点:把持力受一定限制,当需要较大把持力时,手爪体积过大。
2 气动手爪的分类与结构分析 气动手爪目前已经逐渐成为一种标准产品,由专业气动元件厂生产并供给用户选择。
综合各种手爪结构,按手爪的运动情况分平行开闭型手爪;支点开闭型手爪;180°转角开闭型手爪;三爪或四爪定心式手爪。
结构分析选例以下几种(其中平行开闭型手爪有4种)。
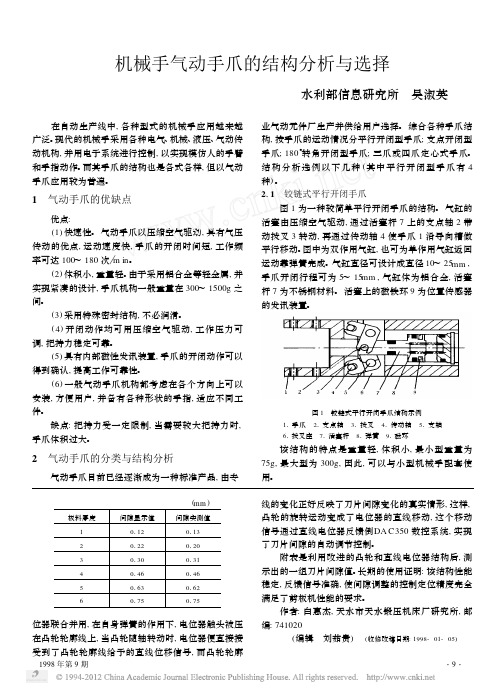
211 铰链式平行开闭手爪图1为一种较简单平行开闭手爪的结构。
气缸的活塞由压缩空气驱动,通过活塞杆7上的支点轴2带动拨叉3转动,再通过传动轴4使手爪1沿导向槽做平行移动。
图中为双作用气缸,也可为单作用气缸返回运动靠弹簧完成。
气缸直径可设计成直径10~25mm,手爪开闭行程可为5~15mm,气缸体为铝合金,活塞杆7为不锈钢材料。
活塞上的磁铁环9为位置传感器的发讯装置。
图1 铰链式平行开闭手爪结构示例11手爪 21支点轴 31拨叉 41传动轴 51支轴 61拨叉座 71活塞杆 81弹簧 91磁环该结构的特点是重量轻,体积小,最小型重量为75g,最大型为300g,因此,可以与小型机械手配套使用。
机械手设计计算说明书

毕业设计设计题目棒料抓装机械手的设计学生姓名学号专业班级指导教师院系名称目录中文摘要 (3)英文摘要 (4)第一章绪论 (5)1.1 工业机械手 (5)1.1.1 工业机械手概述 (5)1.1.2 选题背景 (6)1.1.3 设计目的 (6)1.2 机械手的组成和分类 (7)1.2.1机械手的组成 (7)1.2.2机械手的分类 (10)1.3 国内外发展状况 (12)1.4 课题的主要要求 (13)第二章手部结构 (14)2.1 手部结构设计 (14)2.1.1概述 (14)2.2手部计算 (16)2.2.1 驱动力的计算 (16)2.2.2夹紧缸驱动力计算 (18)2.3 两支点回转式钳爪的定位误差的分析 (18)第三章腕部结构 (19)3.1腕部的结构设计 (19)3.1.1概述 (19)3.1.2 腕部的结构形式 (19)3.2手腕驱动力矩的计算 (20)第四章臂部的结构 (21)4.1 臂部设计的基本要求 (22)4.2 手臂的典型机构以及结构的选择 (23)4.2.1 手臂的典型运动机构 (23)4.2.2 手臂运动机构的选择 (23)4.3 手臂直线运动的驱动力计算 (23)4.3.1 手臂摩擦力的分析与计算 (23)4.3.2 手臂惯性力的计算 (25)4.3.3 密封装置的摩擦阻力 (25)4.4 液压缸工作压力和结构的确定 (26)第五章机身的设计计算 (29)5.1 机身的整体设计 (29)5.2 机身回转机构的设计计算 (30)5.3 机身升降机构的计算 (33)5.3.1 手臂偏重力矩的计算 (33)5.3.2 升降不自锁条件分析计算 (34)5.3.3 手臂做升降运动的液压缸驱动力的计算 (34)5.3.4 油缸结构尺寸的确定 (35)第六章液压系统 (37)6.1液压系统的设计 (37)6.1.1液压系统简介 (37)6.1.2液压系统的组成 (37)6.2机械手液压系统的控制回路 (37)6.2.1 压力控制回路 (37)6.2.2 速度控制回路 (38)6.2.3方向控制回路 (38)6.3 机械手的液压传动系统 (39)6.3.1上料机械手的动作顺序 (39)6.3.2自动上料机械手液压系统原理介绍 (39)6.4机械手液压系统的简单计算 (41)6.4.1 双作用单杆活塞油缸 (42)6.4.2油泵的选择 (45)6.4.3 确定油泵电动机功率N (45)第七章PLC控制回路的设计 (46)7.1电磁铁动作顺序 (47)7.2 根据机械手的动作顺序表 (48)7.3 PLC与现场器件的实际连接图 (49)7.4 梯形图 (50)7.5指令程序 (52)结论 (56)致谢 (57)参考文献: (58)棒料抓装机械手的设计摘要:当今社会信息化、科技化时代到来,机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,可以通过编程控制及检测反馈技术的成熟实现无人化操作,是当代研究十分活跃,应用日益广泛的领域。
机器人手部设计

§4-5手部设计
一、概述 工业机器人的手部(Hand)也叫做末端操作器
(End-effector),它是装在工业机器人手腕上直 接抓握工件或执行作业的部件。人的手有两种 含义:第一种含义是医学上把包括上臂、手腕 在内的整体叫做手;第二种含义是把手掌和手 指部分叫做手。工业机器人的手部接近于第二 种含义。
3.按手指或吸盘数目分 机械手爪可分为:二指手爪、多指手瓜。 机械手爪按手指关节分:单关节手指手爪、多关节手指手爪。 吸盘式手爪按吸盘数目分:单吸盘式手爪、多吸盘式手爪。 图4-49所示为一种三指手爪的外形图,每个手指是独立驱动的。
这种三指手爪与二指手瓜相比可以抓取像立方体、圆柱体、球体 等不同形状的物体。图4-50所示为一种多关节柔性手指手爪,它 的每个手指具有若干个被动式关节(PassivejointS),每个关节不是 独立驱动。在拉紧夹紧钢丝绳后柔性手指环抱住物体,因此这种 柔性手指手爪对物体形状有一种适应性。但是,这种柔性手指并 不同于各个关节独立驱动的多关节手指。
工业机器人手部的特点:
(1)手部与手腕相连处可拆卸。手部与手腕有机械接 口,也可能有电、气、液接头,当工业机器人作业对 象不同时,可以方便地拆卸和更换手部。
(2)手都是工业机器人末端操作器。它可以像人手那 样具有手指,也可以是不具备手指的手;可以是类人 的手爪,也可以是进行专业作业的工具,比如装在机 器人手腕上的喷漆枪、焊接工具等。
机械手手爪部位毕业设计方案说明指导书讲解样本
机械手手爪部位毕业设计方案说明指导书讲解目录摘要 (1)引言 (1) (2) (2) (2) (4) (5) (6) (6) (6) (1)1 (1)1 (1)3 (1)4 (1)8 (1)8 (1)8结束语 (2)6致谢 (2)6参考文献 (2)6附录 (2)7摘要机械手设计包括机械结构设计,检测传感系统设计和控制系统设计等,是机械、电子、检测、控制和计算机技术的综合应用。
本课题通过对设计要求的分析,设计出机械手的总体方案,重点阐述了手部结构的设计以及控制系统硬软件的设计,完成了整个系统工作的动画设计。
实现了机械手的基本搬运功能,达到了预期要求,具有一定的应用前景。
关键词:机械手PLC 动画引言随着世界经济和技术的发展,人类活动的不断扩大,机器人应用正迅速向社会生产和生活的各个领域扩展,也从制造领域转向非制造领域,各种各样的机器人产品随之出现。
像海洋开发、宇宙探测、采掘、建筑、医疗、农林业、服务、娱乐等行业都提出了自动化各机器人化的要求。
随着机器人的产生和大量应用,很多领域,许多单一、重复的机械工作由机器人(也称机械手)来完成。
工业机器人是一种能进行自动控制的、可重复编程的,多功能的、多自由度的、多用途的操作机, 广泛采用工业机器人,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。
和计算机、网络技术一样,工业机器人的广泛应用正在日益改变着人类的生产和生活方式。
机械手是一种模仿人手动作,并按设定的程序来抓取、搬运工件或夹持工具,机械手可在空间抓放物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于自动生产线、自动机的上下料、数控设备的自动换刀装置中。
机械手一般由执行系统、驱动系统、控制系统和人工智能组成,主要完成移动、转动、抓取等动作。
控制系统是机械手的指挥系统,它通过控制驱动系统,让执行器按照规定的要求进行工作,并检测其正确与否。
齿轮齿条式回转型机器人手爪结构设计

齿轮齿条式回转型机器人手爪结构设计机械手爪作为工业机器人最常见的末端执行器,其性能的优劣对于机器人整体的工作效率有着非常重要影响。
我国生产的机械手爪从仿制开始起步,近期产品的质量较早期有所提高。
但受国产配套件质量及设计水平等的影响,我国目前生产的机械手爪的总体水平与进口产品及港口用户的要求仍有较大差距,机械手爪的生产也是如此,为满足市场需求,开发出一种新型的机械手爪势在必行!此次设计主要通过对三种方案的分析,确定了方案三为本设计的最终方案,方案三的手爪,体积较小,重量轻盈。
其中与机器人手腕连接的部分采用了国家标准件的法兰盘,其中的销等零部件,也是通过查询国家标准库后选取的标准件,有利于降低生产企业的制造成本以及使用单位的维护成本。
在满足系统工艺要求的前提下,将机械手系统中相对独立的环节采用高性价比且相对简洁的结构形式和控制系统,采用模块化设计,大量采用标准化、模块化的通用元配件,从而使成本大为降低,具有显著的技术经济性。
通过对比液压驱动、气压驱动、电机驱动的特点,合理选择了气压驱动为本设计的驱动装置。
通过SolidWorks软件进行手爪结构的有限元分析和运动学分析,使得机械手爪完全符合最初的设计要求。
关键词:机械手;SolidWorks;有限元分析1 绪论1.1 设计背景随着社会,尤其是科学技术的不断进步和发展,机械自动化的发展,已经成为新时代的发展的重要的话题之一。
其中,机械手也使用在工业生产过程中最重要的工具,其发展是最快的。
在机械制造业中,机械手也被称为工业机器人,它主要用于运输处理原材料或特定机床转换工具和机器装配等等一些自动化流水生产线。
综上所述,机械手的应用更为有效,可以降低生产成本。
工业自动化水平是PLC的一大特色与亮点,可以以更高的水平获得控制它的能力,并且自动化程度较高。
PLC经常被用于工业生产,同时它的地位急剧增加,功能也有很大的提高。
对于PLC,他的程度是很容易撰写的,使用简单的操作系统也是其一个优势,并在同一时间,以实现控制也方便,这是提高工业生产和加工质量效率。
机械手设计计算说明书
毕业设计设计题目棒料抓装机械手的设计学生姓名学号专业班级指导教师院系名称目录中文摘要 (3)英文摘要 (4)第一章绪论 (5)1.1 工业机械手 (5)1.1.1 工业机械手概述 (5)1.1.2 选题背景 (6)1.1.3 设计目的 (6)1.2 机械手的组成和分类 (7)1.2.1机械手的组成 (7)1.2.2机械手的分类 (10)1.3 国内外发展状况 (12)1.4 课题的主要要求 (13)第二章手部结构 (14)2.1 手部结构设计 (14)2.1.1概述 (14)2.2手部计算 (16)2.2.1 驱动力的计算 (16)2.2.2夹紧缸驱动力计算 (18)2.3 两支点回转式钳爪的定位误差的分析 (18)第三章腕部结构 (19)3.1腕部的结构设计 (19)3.1.1概述 (19)3.1.2 腕部的结构形式 (19)3.2手腕驱动力矩的计算 (20)第四章臂部的结构 (21)4.1 臂部设计的基本要求 (22)4.2 手臂的典型机构以及结构的选择 (23)4.2.1 手臂的典型运动机构 (23)4.2.2 手臂运动机构的选择 (23)4.3 手臂直线运动的驱动力计算 (23)4.3.1 手臂摩擦力的分析与计算 (23)4.3.2 手臂惯性力的计算 (25)4.3.3 密封装置的摩擦阻力 (25)4.4 液压缸工作压力和结构的确定 (26)第五章机身的设计计算 (29)5.1 机身的整体设计 (29)5.2 机身回转机构的设计计算 (30)5.3 机身升降机构的计算 (33)5.3.1 手臂偏重力矩的计算 (33)5.3.2 升降不自锁条件分析计算 (34)5.3.3 手臂做升降运动的液压缸驱动力的计算 (34)5.3.4 油缸结构尺寸的确定 (35)第六章液压系统 (37)6.1液压系统的设计 (37)6.1.1液压系统简介 (37)6.1.2液压系统的组成 (37)6.2机械手液压系统的控制回路 (37)6.2.1 压力控制回路 (37)6.2.2 速度控制回路 (38)6.2.3方向控制回路 (38)6.3 机械手的液压传动系统 (39)6.3.1上料机械手的动作顺序 (39)6.3.2自动上料机械手液压系统原理介绍 (39)6.4机械手液压系统的简单计算 (41)6.4.1 双作用单杆活塞油缸 (42)6.4.2油泵的选择 (45)6.4.3 确定油泵电动机功率N (45)第七章PLC控制回路的设计 (46)7.1电磁铁动作顺序 (47)7.2 根据机械手的动作顺序表 (48)7.3 PLC与现场器件的实际连接图 (49)7.4 梯形图 (50)7.5指令程序 (52)结论 (56)致谢 (57)参考文献: (58)棒料抓装机械手的设计摘要:当今社会信息化、科技化时代到来,机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,可以通过编程控制及检测反馈技术的成熟实现无人化操作,是当代研究十分活跃,应用日益广泛的领域。
五自由度机械手的抓取设计

五自由度机械手的抓取设计随着工业自动化的快速发展,机器人技术也在不断进步,其中五自由度机械手作为机器人的重要组成部分,具有广泛的应用前景。
本文将围绕五自由度机械手的抓取设计展开讨论,旨在深入探讨其工作原理、设计方法及应用案例。
五自由度机械手、抓取设计、自由度、机械手机构、运动学、应用案例五自由度机械手是一种具有五个独立运动自由度的机器人手臂。
这五个自由度包括三个线性移动自由度和两个旋转自由度。
这种机械手能够在三维空间中完成各种复杂的动作,如抓取、搬运、装配等。
抓取设计是五自由度机械手的关键技术之一,通过对机械手爪部进行精确的定位和姿态调整,实现物体的稳定抓取和操作。
五自由度机械手主要由基座、臂部、手部和驱动器等部分组成。
其中,手部是进行抓取操作的关键部件,它通常包括一个或多个手指,以及相应的关节和驱动器。
手指的形状和大小应根据抓取物体的形状和大小进行设计,以确保良好的适应性。
机械臂的每个自由度都由一个电机驱动,通过控制器实现对机械手的位置、姿态和动作的精确控制。
五自由度机械手的五个自由度分别为三条臂的直线移动和两条臂的旋转运动。
通过这五个自由度的协调动作,机械手可以实现空间中的任意位置和姿态。
在抓取设计中,需要根据实际应用需求,对机械手的运动进行规划,以实现物体的稳定抓取和操作。
抓取设计还需要考虑手指与物体的接触方式。
这通常包括面接触、点接触和侧面接触等。
面接触适用于抓取表面较大的物体,可以提供较好的稳定性;点接触适用于抓取表面较小的物体;侧面接触则适用于抓取有一定长度的物体,可以通过多个手指的协同动作实现稳定抓取。
五自由度机械手的抓取设计具有许多优点。
它具有较高的灵活性和适应性,可以抓取各种形状和大小的物体。
五个自由度的设计使得机械手可以到达空间中的任意位置和姿态,实现了更大的操作空间。
通过精确的控制系统和运动规划,机械手可以实现精确的定位和稳定的操作。
然而,五自由度机械手的抓取设计也存在一些缺点。
齿轮齿条式回转型机器人手爪结构设计
齿轮齿条式回转型机器⼈⼿⽖结构设计齿轮齿条式回转型机器⼈⼿⽖结构设计机械⼿⽖作为⼯业机器⼈最常见的末端执⾏器,其性能的优劣对于机器⼈整体的⼯作效率有着⾮常重要影响。
我国⽣产的机械⼿⽖从仿制开始起步,近期产品的质量较早期有所提⾼。
但受国产配套件质量及设计⽔平等的影响,我国⽬前⽣产的机械⼿⽖的总体⽔平与进⼝产品及港⼝⽤户的要求仍有较⼤差距,机械⼿⽖的⽣产也是如此,为满⾜市场需求,开发出⼀种新型的机械⼿⽖势在必⾏!此次设计主要通过对三种⽅案的分析,确定了⽅案三为本设计的最终⽅案,⽅案三的⼿⽖,体积较⼩,重量轻盈。
其中与机器⼈⼿腕连接的部分采⽤了国家标准件的法兰盘,其中的销等零部件,也是通过查询国家标准库后选取的标准件,有利于降低⽣产企业的制造成本以及使⽤单位的维护成本。
在满⾜系统⼯艺要求的前提下,将机械⼿系统中相对独⽴的环节采⽤⾼性价⽐且相对简洁的结构形式和控制系统,采⽤模块化设计,⼤量采⽤标准化、模块化的通⽤元配件,从⽽使成本⼤为降低,具有显著的技术经济性。
通过对⽐液压驱动、⽓压驱动、电机驱动的特点,合理选择了⽓压驱动为本设计的驱动装置。
通过SolidWorks软件进⾏⼿⽖结构的有限元分析和运动学分析,使得机械⼿⽖完全符合最初的设计要求。
关键词:机械⼿;SolidWorks;有限元分析1 绪论1.1 设计背景随着社会,尤其是科学技术的不断进步和发展,机械⾃动化的发展,已经成为新时代的发展的重要的话题之⼀。
其中,机械⼿也使⽤在⼯业⽣产过程中最重要的⼯具,其发展是最快的。
在机械制造业中,机械⼿也被称为⼯业机器⼈,它主要⽤于运输处理原材料或特定机床转换⼯具和机器装配等等⼀些⾃动化流⽔⽣产线。
综上所述,机械⼿的应⽤更为有效,可以降低⽣产成本。
⼯业⾃动化⽔平是PLC的⼀⼤特⾊与亮点,可以以更⾼的⽔平获得控制它的能⼒,并且⾃动化程度较⾼。
PLC经常被⽤于⼯业⽣产,同时它的地位急剧增加,功能也有很⼤的提⾼。
对于PLC,他的程度是很容易撰写的,使⽤简单的操作系统也是其⼀个优势,并在同⼀时间,以实现控制也⽅便,这是提⾼⼯业⽣产和加⼯质量效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三爪(外抓)08
精 机选械p手p结t 构P形a式ge 2P2age 22
三爪内撑结构
精 机选械p手p结t 构P形a式ge 2P3age 23
连杆结构四爪
精 机选械p手p结t 构P形a式ge 2P4age 24
斜楔杠杆式手爪01
精 机选械p手p结t 构P形a式ge 2P5age 25
斜楔杠杆式手爪02
布线合理
精 机选械p手p结t 构P形a式ge 4P5age 45
机械手抓图册
汽车行业机械手抓 手.pdf
汽车行业机械手抓图册 大概有73种抓手装配图
工业机械手图册.p df
比较老的书,讲机械手 方案设计
精 机选械p手p结t 构P形a式ge 4P6age 46
真空吸取机械手抓 手.pdf
章鱼吸盘(大面积真空 吸具)运用类型
用途较少
移动式可适应抓 取物体直径变化
平行连杆两爪01
精 机选械p手p结t 构P形a式ge 5Page 5
平行连杆两爪02
精 机选械p手p结t 构P形a式ge 6Page 6
平行连杆两爪03
精 机选械p手p结t 构P形a式ge 7Page 7
平行连杆两爪04
精 机选械p手p结t 构P形a式ge 8Page 8
柔性自适应手爪
精 机选械p手p结t 构P形a式ge 3P0age 30
真空吸盘手爪
精 机选械p手p结t 构P形a式ge 3P1age 31
码垛机械手手爪 袋装
精 机选械p手p结t 构P形a式ge 3P2age 32
Hale Waihona Puke 码垛机械手手爪 纸箱精 机选械p手p结t 构P形a式ge 3P3age 33
轮胎手爪(内撑式)
工业机器人.pdf
比较老的书,讲机械手 手抓设计与计算等
真空吸盘计算
工件参数 材料:SUS304 表面特征:光滑、平坦、干燥 尺寸:2500x1250x2.5mm 搬运加速度:x ,y ,z轴 5m/s^2
解:(1求工件质量 m=LxWxHxρ L=长度(m) W=长度(m) H=长度(m) ρ=密度(kg/m^3)
m=2.5x1.25x0.0025x7850 =61.33kg
精机选械p手p结t 构P计a算ge4P7age 47
真空吸盘计算
2.1真空吸盘水平放置,并垂直移动
2.2真空吸盘水平放置,并水平移动
精机选械p手p结t 构P计a算ge4P8age 48
真空吸盘计算
2.3真空吸盘垂直放置,并垂直移动
2.4吸盘大小计算 F=P*A A=PI*(D/2)^2 P=真空度 一般取0.5MP F=吸盘满足移动所需的力 根据上式可以推倒出吸盘直径
平行连杆两爪05
精 机选械p手p结t 构P形a式ge 9Page 9
平行连杆两爪06
精 机选械p手p结t 构P形a式ge 1P0age 10
平行连杆两爪06
精 机选械p手p结t 构P形a式ge 1P1age 11
齿轮齿条两爪
精 机选械p手p结t 构P形a式ge 1P2age 12
双齿轮手爪01
2、齿轮齿条 3、双齿轮驱动 4、斜楔杠杆式 5、槽轮滑动式 6、柔性自适应 7、真空及电磁吸附式 8、仿生机械手
精 机选械p手p结t 构P形a式ge 3P8age 38
仿生机械手视频
精 仿选生p机p械t 手P视a频ge 3 9Page 39
仿生机械手视频
精 He选repcpotmesPaygoeur4f0ooter Page 40
精 机选械p手p结t 构P形a式ge 1P3age 13
双齿轮手爪02
精 机选械p手p结t 构P形a式ge 1P4age 14
三爪(外抓)01
精 机选械p手p结t 构P形a式ge 1P5age 15
三爪(外抓)02
精 机选械p手p结t 构P形a式ge 1P6age 16
三爪(外抓)03
精 机选械p手p结t 构P形a式ge 1P7age 17
精 机选械p手p结t 构P形a式ge 3P4age 34
仿生机械手
精 机选械p手p结t 构P形a式ge 3P5age 35
仿生机械手指
精 机选械p手p结t 构P形a式ge 3P6age 36
仿生机械手
精 机选械p手p结t 构P形a式ge 3P7age 37
机械手结构类型总结
从爪子数量来分: 两个、三个、四个或者更多 其中两爪最多 从抓取方式来分: 外卡式与内撑式 从结构形式来分:1、平行连杆
机械手结构设计时需要注意的细节
一、定位方式 二、易互换 三、灵巧,布线合理 四、稳定可靠
精 机选械p手p结t 构P形a式ge 4P1age 41
机械手手爪参考视频
精 机选械p手p结t 构P形a式ge 4P2age 42
定位方式
精 机选械p手p结t 构P形a式ge 4P3age 43
易互换
精 机选械p手p结t 构P形a式ge 4P4age 44
精机选械p手p结t 构P计a算ge4P9age 49
连杆结构计算
精机选械p手p结t 构P计a算ge5P0age 50
解:P=2*P1*SINa P1=P/(2*SINa)
因N*L1=P1*L2 N=P1*L2/L1
=P*L2/(2*L1*SINa)
三爪(外抓)04
精 机选械p手p结t 构P形a式ge 1P8age 18
三爪(外抓)05
精 机选械p手p结t 构P形a式ge 1P9age 19
三爪(外抓)06
精 机选械p手p结t 构P形a式ge 2P0age 20
三爪(外抓)07
精 机选械p手p结t 构P形a式ge 2P1age 21
带纠正功能可 参考视频
机械手手爪设计类型及其计算
人手抓取方式有那些?
夹
捏
握
精 He选repcpotmesPaygoeur2footer Page 2
机械手抓取方式
捏
握
夹
精 He选repcpotmesPaygoeur3footer Page 3
机械手手爪从人手抓取物体中得到的结构形式
形式最多 用途最广
精 He选repcpotmesPaygoeur4footer Page 4
精 机选械p手p结t 构P形a式ge 2P6age 26
斜楔杠杆式手爪03 电动机座加工自动线卸料机械手
精 机选械p手p结t 构P形a式ge 2P7age 27
适应不同直径手爪
精 机选械p手p结t 构P形a式ge 2P8age 28
槽轮自动调节位置手爪
精 机选械p手p结t 构P形a式ge 2P9age 29