陀螺仪测试方法V1.0
陀螺仪标准基线定向测量方法

第2期
许文媳,等:陀螺仪标准基线定向测量方法
81
高精度角度测量获得。 装置中平行光管C是定制的标准器,焦距/ =
550 nnn,可提供稳定的、接近无穷远的十字丝目 标⑴。对于a°c定向而言,整个过程相对单一,可行 性较高,而Sc的定向过程中却存在测角方法变换,
仪与平行光管对调焦误差引入的不确定度进行估 测。估测方法是以平行光管的十字丝为目标,使用 TS60照准目标读取水平角值,进行远近调焦后再照 准目标,并读取水平角读数,最后取2次读数差的绝 对值为不符值,完成一次试验。经过10次试验后, 最大不符值和最小不符值分别为0"和1.5",试验数 据按“极差法”评定不确定度:
依据JJG(测绘)5201 - 2013(陀螺经纬仪》的 要求,为了保障隧道工程定向的准确性,需对陀螺仪 进行检定。陀螺仪检定的计量标准器一般是指陀螺 仪标准基线,其主要作用就是提供方向基准。本文 主要探讨解决陀螺仪标准基线长、短目标点定向难 的问题。
2陀螺仪标准基线定向
2. 1陀螺仪标准基线的建设 参照《陀螺经纬仪》对陀螺仪计量标准装置的
Standard Baseline Orientation Measurement for Gyroscopes
XU Wenjing, WANG Lulu, DONG Xuming, WU Xuewen, SHEN Yingguang
摘要:陀螺仪标准基线是陀螺仪检定的主要计量标准器,标准基线组成的特殊性会导致其定向时 存在前后视距差过大的问题,进而在定向结果中引入不可控的调焦误差,大大降低定向精度。经过 大量的试验测试和研究,提出利用大视距差高精度测角法来消除调焦误差对定向精度的影响,并论 证了该方法的测量结果具有较高的可信度。 关键词:陀螺经纬仪检定;标准基线;调焦误差;定向精度;不确定度
陀螺操作手册

压在不接电缆时为 45V 左右。它随外接电缆长度(电缆电阻)的增加而升高,最高不会 超过 110V。陀螺不工作时为 110V 左右。当开关②置于电流位置时,显示探管供电电流, 这个电流在测量时为 150mA 左右,陀螺不工作时为 0mA。 ⑧ 高边/磁性按钮,该按钮用于切换高边和磁性工作方式,用于陀螺测量时,为高边和北 向高边工作方式。 ⑨ 锁定控制开关 当开关⑨设置于锁定位置(按下)时,按下启动按钮③可以启动陀螺, 进行测量。当开关⑨设置于关闭位置时,主机停止给探管供电,无法进行测量工作。关 闭陀螺后再启动,时间间隔必须大于 30 秒钟。 ⑩ 外接司钻显示器插座。
并注意上扣过程中,装有陀螺仪的抗压外壳不可有跳动,碰撞; 使用电缆绞车起、下仪器时,每次电缆从静止到运动、或相反,必须缓慢加速或缓慢
减速,加速度应小于 5cm/s²; 定向开窗侧钻过程中,仪器坐键的下放速度不可以过快,应控制在 15 米/分钟以内; 陀螺仪在工作状态下必须静止姿态,禁止晃动陀螺测斜仪探管; 控制测量温度,不要超过规定范围,否则会降低陀螺仪寿命,甚至导致测量失败; 每次开机启动陀螺测斜仪之前,必须保证仪器处于静止状态。陀螺测斜仪运行中的任
3
MDRO-021(Ф38)型陀螺测斜仪操作手册
第三章 仪器各部件说明
一、地面仪器主机(见附图 3-1)
图 3-1 主机控制箱 ① 电源总开关 ② 探管电流/电压指示切换开关 ③ 启动陀螺按钮,在开关⑨置于锁定状态下,用于启动陀螺,并开始测量。 ④ 测量控制开关,用于有线随钻/陀螺(115/230)测斜模式切换。 ⑤ 停止陀螺按钮,在开关⑨置于锁定状态时,按下停止按钮⑤可以让陀螺停止工作。 ⑥ 测量指示灯,在测量控制开关⑨置于锁定位置时,按下启动按钮③,该指示灯闪烁 30
陀螺仪测试方法V1.0
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
测试各轴晃动时,将手机朝向变为左
6
方位测试
侧横放,但不改变晃动方向(即XYZ 三轴随着手机的朝向变动而变动,非
绝对固定)
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
7
测试各轴晃动时,将手机朝向变为右 侧横放,但不改变晃动方向(即XYZ 三轴随着手机的朝向变动而变动,非 绝对固定)
1.Z轴应为蓝线,若发现围绕 Z轴晃动时,出现的不是蓝 线,那就是问题; 2.晃动的越快,线条越密 集;晃动的越慢,线条越稀 疏; 3.晃动幅度越大,线条越高 度越大;晃动幅度越小,线 条高度越小; 4.在线条图的下方坐标值显 示处,Z坐标值会根据晃动幅 度和晃动速度计算出来,值 越大,表示晃动幅度和晃动 速快越快
备注
1.Y轴应为绿线,若发现围绕 X轴晃动时,出现的不是绿 线,那就是问题; 2.晃动的越快,线条越密 集;晃动的越慢,线条越稀 疏; 3.晃动幅度越大,线条越高 度越大;晃动幅度越小,线 条高度越小; 4.在线条图的下方坐标值显 示处,Y坐标值会根据晃动幅 度和晃动速度计算出来,值 越大,表示晃动幅度和晃动 速快越快
在线条图的下方坐标值显示处z坐标值会根据晃动幅度和晃动速度计算出来值越大表示晃动幅度和晃动速快越快测试各轴晃动时将手机朝向变为平放桌面但不改变晃动方向即xyz三轴随着手机的朝向变动而变动非绝对固定测试效果图中的xyz线条不会随着手机朝向的改变而改变原因
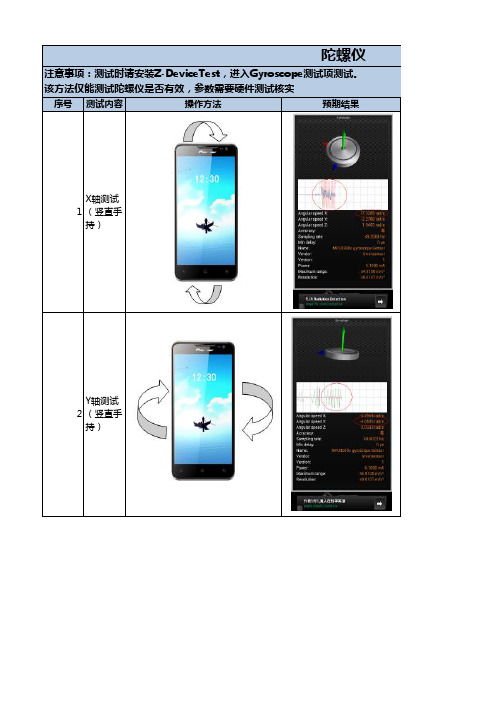
陀螺仪
注意事项:测试时请安装Z-DeviceTest,进入Gyroscope测试项测试。 该方法仅能测试陀螺仪是否有效,参数需要硬件测试核实
原因:陀螺仪仅关注晃动方 向,不会根据手机实际方向 改变
陀螺仪漂移及测试

KM I Bx /H
ωe cos cosK
2019/12/14
19
§6.4 陀螺测试的力矩反馈法
二 力矩反馈法法中陀螺相对地理坐标系的取向
陀螺相对地理坐标系的位置需借助转台
3.陀螺自转轴沿当地铅垂线方向
z x
ey ecoscosK
ly y
ωd
Mb
mgly H
KM IBx /H
陀螺漂移产生的原因是作用在陀螺上的干扰 力矩根据干扰力矩的性质及其变化规律,干扰力 矩可以分为两类:
• 确定性干扰力矩 有规律、可试验或计算确定,易于 补偿。
• 随机性干扰力矩 无规律性。引起陀螺的随机漂移, 只能用统计方法来估计其概率统计 特性。
2019/12/14
5
§6.2 影响陀螺漂移的主要因素
d ey p
精确定位定向,即陀螺输入轴与转台轴平行,并且要使 转台在地理坐标系中精确定向。 精确地测出转台的转速。
2019/12/14
12
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
首先在一段时间间隔内,观测转台相对地球的转角,然后根 据地球自转角速度沿转台方向的分量通过计算求得在这段时 间内地球相对惯性空间的转角
ie ey T
得到在同一时间间隔内转台相对惯性空间的转角
ip ie p
用时间间隔相除,即得到陀螺的漂移角速度
d ip / T ey p
2019/12/14
13
§6.3 陀螺测试的伺服跟踪法
三 伺服跟踪法的转台轴的取向
1. 输入轴在水平面内沿东西方向
1. 摩擦力矩及其引起的漂移 2. 不平衡力矩及其引起的漂移 3. 非等弹性力矩及其引起的漂移
陀螺仪漂移及测试课件

陀螺仪测试中的注意事项
在进行陀螺仪测试时,应确保测试环 境干净整洁,避免灰尘、污垢等杂质 对测试结果造成影响。
在进行动态测试时,应遵循安全操作 规程,确保测试过程中的安全。
测试前应对陀螺仪进行充分的预热, 以确保其性能稳定。
对于高精度的陀螺仪,应采用高精度 的测试设备进行测试,以确保测试结 果的准确性。
陀螺仪的种类和用途
机械陀螺仪
微机械陀螺仪
利用旋转轴的定轴性,用于方向测量 和控制系统,如导弹、飞机、船舶等 导航系统。
利用微机械加工技术制造,具有低成 本、小型化、集成化等特点,用于消 费电子产品、智能穿戴设备等。
光学陀螺仪
利用光束的干涉效应,具有高精度、 抗电磁干扰等特点,用于高精度测量 和控制系统,如卫星定位系统、惯性 导航系统等。
CHAPTER
陀螺仪静态测试
01
02
陀螺仪静态测试是指将 陀螺仪置于静止状态下 进行测试,以评估其性能。
测试内容包括检查陀螺 仪的零点稳定性、分辨 率、噪声水平等。
03
静态测试通常在实验室 环境下进行,以确保测 试结果的准确性。
04
静态测试还可以用于评 估陀螺仪在不同温度和 湿度条件下的性能表现。
陀螺仪动态测试
01
02
03
04
陀螺仪动态测试是指在实际运 动状态下对陀螺仪进行测试, 以评估其在动态环境中的性能。
测试内容包括检查陀螺仪的动 态响应速度、抗干扰能力、稳
定性等。
动态测试通常在振动台、离心 机等设备上进行,以模拟实际
使用中的各种运动状态。
动态测试还可以用于评估陀螺 仪在不同运动状态下的性能表 现,如旋转、俯仰、滚动等。
CHAPTER
第6章-陀螺仪漂移及测试
陀螺仪的测试与标定
2018/2/25
1
§6.1 陀螺漂移的基本概念
一 自由陀螺的漂移 由于各种原因,在陀螺上往往作用有人们所不 希望的各种干扰力矩,在这些可能是很小的干扰力 矩的作用下,陀螺将产生进动,从而使角动量向量 慢慢偏离原来的方向,我们把这种现象称为陀螺的 漂移。把在干扰力矩作用下陀螺产生的进动角速度 称为陀螺的 陀螺漂移的数学模型
陀螺漂移的物理模型
ωd D0 D y a y Dz a z D yy a Dzz a
2 y 2 z
ax a ay az
Dxy a x a y D yz a y a z Dxz a x a z
一 伺服跟踪法的基本原理
双自由度陀螺的单轴转台测漂
2018/2/25 13
§6.3 陀螺测试的伺服跟踪法
二 伺服跟踪法的测速方法
d ey p
精确定位定向,即陀螺输入轴与转台轴平行,并且要使 转台在地理坐标系中精确定向。 精确地测出转台的转速。
2018/2/25
14
§6.3 陀螺测试的伺服跟踪法
2018/2/25
26
§6.5 陀螺漂移的数学模型
普遍采用的陀螺误差模型
ax a a y az
2 d D0 Dx a x D y a y Dz a z D yy a y Dzz a z2
Dxy a x a y D yz a y a z D xz a x a z (ip ) y
二 伺服跟踪法的测速方法
首先在一段时间间隔内,观测转台相对地球的转角,然后根 据地球自转角速度沿转台方向的分量通过计算求得在这段时 间内地球相对惯性空间的转角
陀螺仪检验方法
陀螺仪检验方法陀螺仪是一种广泛应用于航空航天、导航系统、惯性导航等领域的传感器,用于测量角速度和角度变化。
它的工作原理是通过感应旋转的力矩来检测物体的转动。
由于其在各个领域的重要性,对陀螺仪的准确性和可靠性的检验显得尤为重要。
下面我们将介绍一些常见的陀螺仪的检验方法。
1.环境温度测试:陀螺仪的性能受环境温度变化的影响较大,因此在检验之前需要对其在不同温度下的性能进行测试。
一种常见的方法是将陀螺仪放置在恒温箱中,通过逐步提高温度或降低温度来模拟不同的工作温度,然后对陀螺仪的输出进行监测和记录,以评估其温度稳定性和性能。
2.角速度精度测试:陀螺仪的主要功能是测量角速度,因此角速度精度是其最重要的指标之一。
通常采用基准陀螺仪或精密加速度计作为参考,将待检验陀螺仪与参考仪器同时连接在同一测试平台上,并进行角速度输入。
通过比较待检验陀螺仪和参考仪器的输出,计算其误差,来评估陀螺仪的角速度精度。
3.初始校准误差测试:陀螺仪的初始校准误差是指在其初始启动时由于制造或安装原因引起的误差。
为了准确测量角度变化,陀螺仪的初始校准非常重要。
常见的测试方法是将陀螺仪安装在一个可以自由转动的平台上,然后对其进行起动和停止操作,并记录其输出值。
通过分析输出值的变化,可以评估陀螺仪的初始校准误差。
4.动态性能测试:陀螺仪在实际应用中往往需要承受各种复杂的运动和振动,在这些情况下,其动态性能是一个关键指标。
常见的方法是将陀螺仪安装在机械臂或转台上,通过控制机械臂或转台的运动来产生特定的加速度和角速度输入,然后记录陀螺仪的输出。
通过分析输出和输入之间的差异,可以评估陀螺仪的动态性能。
5.稳定性和重复性测试:陀螺仪的稳定性和重复性是指其在多次测量中输出值的一致性。
为了测试陀螺仪的稳定性和重复性,常见的方法是对同一角度或角速度进行多次测量,并计算其平均值和标准偏差。
通过分析平均值和标准偏差的变化,可以评估陀螺仪的稳定性和重复性。
综上所述,陀螺仪的检验方法包括环境温度测试、角速度精度测试、初始校准误差测试、动态性能测试以及稳定性和重复性测试。
飞机爱好者A3 EVO 6 轴陀螺仪使用说明书
中文使用说明书版本:V1.0 2021/10感谢您购买和使用我们的产品。
A3 EVO是一款专门为遥控固定翼模型飞行设计的高性能、功能强大的6轴陀螺仪产品。
为了让您更好地了解和使用本产品和安全飞行,请认真阅读本说明书并按说明书的要求进行相关设置。
注意事项•遥控飞机模型不是玩具!螺旋桨高速旋转带来的潜在风险相当高,它们可能会导致严重的伤害,一切的使用要符合并遵守共同的安全规则和相关法规。
我们建议您在第一次使用我们的陀螺仪进行飞行时,寻求具有丰富飞行经验的玩家的指导和帮助;•A3 EVO在通电后需要进行精确的陀螺仪校准,所以,在接通飞机电源后,请保持飞机静止,等待蓝灯闪烁若干秒完成校准后,才能开始飞行,如果在这个阶段陀螺仪检测到有轻微的移动,蓝灯会一直保持常亮,直至飞机不再移动才重新开始校准过程,尽管如此,开机初始化阶段只需要保持静止即可,并不需要将飞机水平放置;•A3 EVO在通电后还需要进行摇杆中位校准,所以,通电前,先把发射机的所有摇杆放在中间位置,油门摇杆放在最低,打开发射机电源,然后再接通飞机电源,在初始化过程中不要移动任何摇杆直至初始化完成;•安装完成后请务必逐一检查副翼、升降、方向三个通道的陀螺仪修正方向是否正确!并且养成在每次起飞前都检查确认陀螺仪方向的习惯,错误的陀螺仪方向将会导致失控甚至坠机!•安装陀螺仪后,由于舵机的修正动作明显增加,将导致工作电流增大,请务必确保UBEC或电调的内置BEC能够提供足够的输出电流,否则可能造成电压不稳定,对飞行带来安全隐患。
为了获得更加稳定的电压,建议将配送的大电容插在陀螺仪或接收机的任意一个空闲的接口上。
使用一片附带的双面胶将陀螺仪牢固地安装在机身内部,安装时应尽量靠近飞机的重心位置,使陀螺仪外壳的三条边与飞机的三个旋转轴完全平行,并且保持陀螺仪与安装平面平行,尽量减小安装角度的误差,这样可以更好地发挥陀螺仪的性能。
A3 EVO可以水平或垂直安装,但无论是哪种安装方式,都要保证带按钮的一侧短边正对机头方向,即飞行的前进方向,排针指向后方,否则自动平衡模式和自动吊机模式将不能正常工作。
陀螺仪检验方法
陀螺仪检验方法
陀螺仪的检验方法主要包括以下几个步骤:
标度因子(偏移和灵敏度)测试:这是陀螺仪性能测试中最重要和最常见的一项。
标度因子是指陀螺仪输出与其输入之间的比例关系,包括偏移和灵敏度两部分。
非线性误差测试:非线性误差是指陀螺仪输出与输入之间的非线性关系。
这种误差通常通过比较陀螺仪的实际输出和理论输出来测量。
偏差测试:偏差是指陀螺仪在没有输入时的输出。
这种误差通常通过在陀螺仪静止时测量其输出来得到。
分辨率测试:分辨率是指陀螺仪能够检测到的最小的输入变化。
这种性能通常通过测量陀螺仪在微小输入变化下的输出变化来得到。
灵敏度对温度漂移和灵敏度对加速度漂移的测试:这两项测试是为了评估陀螺仪在温度变化和加速度变化下的性能变化。
校准:在使用陀螺仪前,需要进行校准。
校准过程通常包括将陀螺仪放置在静止状态下一段时间,然后按照说明书中的步骤进行校准,包括改变陀螺仪的姿态,并根据陀螺仪的指示进行调整。
光纤陀螺仪测试方法
光纤陀螺仪测试方法1 范围本标准规定了作为姿态控制系统、角位移测量系统和角速度测量系统中敏感器使用的单轴干涉性光纤陀螺仪(以下简称光纤陀螺仪)的性能测试方法。
2 规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注目期的引用文件,其随后所有的修改单(不包含勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB 321-1980 优先数和优先系数CB 998 低压电器基本实验方法GJB 585A-1998 惯性技术术语GJB 151 军用设备和分系统电磁发射和敏感度要求3 术语、定义和符号GJB 585A-1998确立的以及下列术语、定义和符号适用于本标准。
3.1 术语和定义3.1.1 干涉型光纤陀螺仪 interferometric fiber optic gyroscope仪萨格奈克(Sagnac)效应为基础,由光纤环圈构成的干涉仪型角速度测量装置。
当绕其光纤环圈等效平面的垂线旋转时,在环圈中以相反方向传输出的两束相干光间产生相位差,其大小正比于该装置相对于惯性空间的旋转角速度,通过检测输出光干涉强度即反映出角速度的变化。
3.1.2 陀螺输入轴 input axis of gyro垂直于光纤环圈等效平面的轴。
当光纤陀螺仪绕该轴有旋转角速度输入时,产生光纤环圈相对于惯性空间输入角速度的输出信号。
3.1.3 标度因数非线性度 scale factor nonlinearity在输入角速度范围内,光纤陀螺仪输出量相对于最小二乘法拟合直线的最大偏差值与最大输出量之比。
3.1.4 零偏稳定性 bias stability当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。
以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
3.1.5 零偏重复性 bias repeatability在同样条件下及规定间隔时间内,多次通电过程中,光纤陀螺仪零偏相对其均值的离散程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
原因:陀螺仪仅关注晃动方 向,不会根据手机实际方向 改变
原因:陀螺仪仅关注晃动方 向,不会根据手机实际方向 改变
原因:陀螺仪仅关注晃动方 向,不会根据手机实际方向 改变
原因:陀螺仪仅关注晃动方 向,不会根据手机实际方向 改变
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
5
测试各轴晃动时,将手机朝向变为扣 在桌面,但不改变晃动方向(即XYZ 三轴随着手机的朝向变动而变动,非 绝对固定)
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
测试各轴晃动时,将手机朝向变为左
6
方位测试
侧横放,但不改变晃动方向(即XYZ 三轴随着手机的朝向变动而变动,非
陀螺仪
注意事项:测试时请安装Z-DeviceTest,进入Gyroscope测试项测试。 该方法仅能测试陀螺仪是否有效,参数需要硬件测试核实
序号 测试内容
操作方法
预期结果
X轴测试 1 (竖直手
持)
Y轴测试 2 (竖直手
持)
Z轴测试 3 (竖直手
持)
4
测试各轴晃动时,将手机朝向变为平 放桌面,但不改变晃动方向(即XYZ 三轴随着手机的朝向变动而变动,非 绝对固定)
绝对固定)
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
7
测试各轴晃动时,将手机朝向变为右 侧横放,但不改变晃动方向(即XYZ 三轴随着手机的朝向变动而变动,非 绝对固定)
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
8
测试各轴晃动时,将手机朝向变为倒 立竖直放置,但不改变晃动方向(即 XYZ三轴随着手机的朝向变动而变 动,非绝对固定)
备注
1.Y轴应为绿线,若发现围绕 X轴晃动时,出现的不是绿 线,那就是问题; 2.晃动的越快,线条越密 集;晃动的越慢,线条越稀 疏; 3.晃动幅度越大,线条越高 度越大;晃动幅度越小,线 条高度越小; 4.在线条图的下方坐标值显 示处,Y坐标值会根据晃动幅 度和晃动速度计算出来,值 越大,表示晃动幅度和晃动 速快越快
1.Z轴应为蓝线,若发现围绕 Z轴晃动时,出现的不是蓝 线,那就是问题; 2.晃动的越快,线条越密 集;晃动的越慢,线条越稀 疏; 3.晃动幅度越大,线条越高 度越大;晃动幅度越小,线 条高度越小; 4.在线条图的下方坐标值显 示处,Z坐标值会根据晃动幅 度和晃动速度计算出来,值 越大,表示晃动幅度和晃动 速快越快
测试效果图中的X、Y、Z线 条不会随着手机朝向的改变 而改变
9
游戏体验
安装Gyro 畅度
Island与对比机对比体验流
与对比机差不多
仪
。
结果分析
测试结果 测试者
1.X轴应为红线,若发现围绕 X轴晃动时,出现的不是红 线,那就是问题; 2.晃动的越快,线条越密 集;晃动的越慢,线条越稀 疏; 3.晃动幅度越大,线条越高 度越大;晃动幅度越小,线 条高度越小; 4.在线条图的下方坐标值显 示处,X坐标值会根据晃动 幅度和晃动速度计算出来, 值越大,表示晃动幅度和晃 动速快越快