扒渣机液压系统设计与仿真分析_杨林
《2024年度无卡轴旋切机液压控制系统设计与仿真分析》范文

《无卡轴旋切机液压控制系统设计与仿真分析》篇一一、引言随着现代工业技术的飞速发展,自动化、智能化、高精度化的机械设备在各行各业得到了广泛应用。
无卡轴旋切机作为一种重要的木材加工设备,其性能的优劣直接影响到木材加工的效率和产品质量。
液压控制系统作为无卡轴旋切机的核心部分,其设计及性能的优劣对设备的整体性能具有决定性影响。
本文旨在探讨无卡轴旋切机液压控制系统的设计与仿真分析,以期为相关设备的研发和优化提供理论依据。
二、无卡轴旋切机液压控制系统设计1. 系统结构无卡轴旋切机液压控制系统主要由液压泵、执行机构、控制阀、压力传感器等组成。
其中,液压泵为系统提供动力,执行机构包括旋切机的刀片、电机等,控制阀负责调节系统的压力和流量,压力传感器则用于实时监测系统压力。
2. 设计原则在设计无卡轴旋切机液压控制系统时,应遵循以下原则:(1)稳定性:系统应具有良好的稳定性,以确保在各种工况下都能正常运行。
(2)精度:系统应具有较高的控制精度,以满足无卡轴旋切机的切割精度要求。
(3)安全性:系统应具备完善的安全保护措施,以防止因过载、过压等引起的设备损坏和人员伤害。
(4)节能性:系统应尽可能降低能耗,提高工作效率。
3. 设计流程无卡轴旋切机液压控制系统的设计流程主要包括需求分析、方案设计、系统建模、仿真分析、优化改进等步骤。
其中,需求分析是设计的基础,方案设计是关键,系统建模和仿真分析是设计的重要环节,优化改进则是提高系统性能的关键手段。
三、仿真分析利用计算机仿真技术对无卡轴旋切机液压控制系统进行仿真分析,可以有效地预测系统的性能,为实际设备的研发和优化提供理论依据。
仿真分析主要包括建模、参数设置、仿真实验及结果分析等步骤。
1. 建模根据无卡轴旋切机液压控制系统的实际结构和工作原理,建立系统的数学模型和物理模型。
数学模型主要用于描述系统的运动规律和性能指标,物理模型则用于模拟实际设备的运行过程。
2. 参数设置根据实际需求和设计要求,设置系统的各项参数,如液压泵的功率、执行机构的运动速度、控制阀的调节范围等。
基于Adams和Matlab的L_省略_120扒渣机扒渣力仿真测试及优化_郭年琴
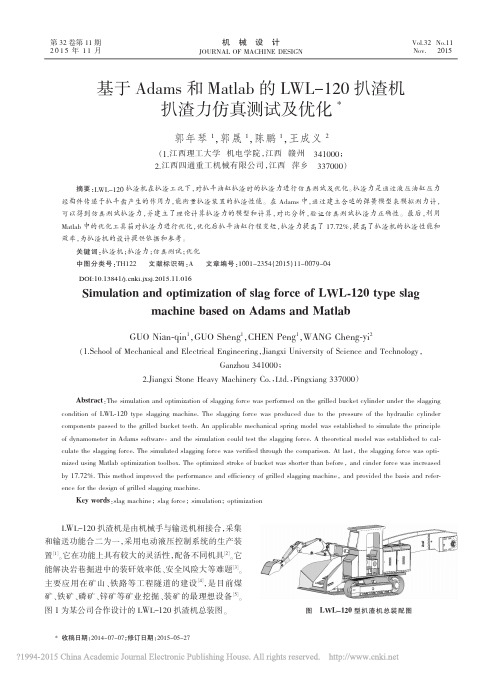
图 LWL-120 型扒渣机总装配图
* 收稿日期:2014-07-07;修订日期:2015-05-27
80
机械设计
第 32 卷第 11 期
1 扒斗油缸扒渣时的理论扒渣力计算 2 扒斗油缸扒渣时的扒渣力仿真测试
扒斗油缸扒渣时的理论扒渣力 FB 为:
FB =FL3 ×i=P×A3 ×i
(1)
式中:FL3 — ——扒斗液压缸提供的推力;
测试扒渣力的原理是通过建立合适的弹簧模拟测 力计来达到测试的目的。 而扒渣力主要是油缸压力经扒 渣装置上的各个杆件, 最后通过扒斗进行扒渣。 采用 SolidWorks 作为三维建模工具[6],利用 Adams 建立扒渣 装置的虚拟样机模型[7],设置环境变量[8],添加运动副和 驱动。 在测试中,扒渣装置上相关构件的初始位置要适 当的调整,有利于仿真的方便和准确。 在 Adams 中进行 位置调整比较麻烦。 利用 SolidWorks 和 Adams 的数据 交换接口实现数据交换 , [9-10] 将模型在 SolidWorks 中初 始位置调整好再导入 Adams,对扒斗油缸扒渣时的初始 状态进行调整,调整小臂和扒斗的铰点到铲斗油缸的垂 直距离最大,即要调整扒斗油缸活塞和扒斗油缸型腔之 间的长度,使扒斗油缸对扒斗的铰销产生的力矩最大。
A3 — ——扒斗液压缸大腔作用面积;
P — ——液压系统工作压力;
i— — — 传 力 比 。
扒斗液压缸大腔作用面 积 A3 可通过其 直径 d 为 0.063 m 计算,液压系统的工作压力 P 为 20 MPa,传力
比 i 由扒渣装置扒斗连杆机构杆件力矩平衡方程计算。
扒渣装置上扒斗连杆机构杆件简化如图 2 所示。
F=20×106×3.14×0.031 52=62 313.3 N
锻造操作机液压系统设计与仿真分析

锻造操作机液压系统设计与仿真分析摘要:锻造操作机是核电、火电、轨道交通等重大装备制造的关键设备。
锻造操作机液压控制系统包括夹持系统、提升俯仰系统、水平移动系统、缓冲系统、大车行走系统和夹钳旋转系统。
采用平均流量法对液压泵站进行节能设计。
在数学模型的基础上对液压系统的关键控制性能(快速性、准确性、起动性)和可靠性进行仿真分析研究。
结果表明,通过对液压系统回路的合理设计,改善了液压系统的控制性能,提高了液压系统的可靠性,可为大流量液压系统的设计提供理论指导,实现锻造操作机的快速、精确、稳定、智能控制。
关键词:锻造操作机;液压系统;设计;仿真0引言目前,我国的大型操作机主要依赖进口,不仅价格昂贵、供货周期长,而且也使我国大型锻件的制造加工技术受制于人。
因此,自主研发大型锻造操作机对我国重大装备制造业的发展有重要意义。
锻造操作机的灵巧性和快速性是保证锻件质量的重要指标,而大型操作机的大负载、大惯量和冲击载荷对传动系统的设计带来了很大的困难,通常需要采用机电液混合驱动的方式来实现快速和准确控制,因此,液压系统是大型操作机设计的关键之一。
1操作机液压系统设计1.1操作机液压系统功能分析锻造操作机主要由大车、夹钳和台架三部分组成,为满足开坯、拔长、镦粗和整圆等锻造工艺要求,操作机需要具备行走、夹钳开闭、旋转、提升、平移和缓冲等多种功能。
对于大型操作机,上述功能主要由液压驱动方式来实现。
行走功能:由液压系统驱动大车前进和后退,实现锻件的水平移动。
通过液压马达来实现大车的运动和定位,同时控制大车起停带来的冲击。
夹持功能:由液压系统驱动夹钳实现锻件的夹持和旋转。
通过夹钳液压缸实现锻件的夹持,通过液压马达驱动夹钳旋转,并实现准确定位。
悬架功能:由液压系统驱动悬架液压缸实现夹钳和锻件的垂直移动和俯仰。
同时设置液压缓冲机构,以缓解锻压对夹钳的冲击。
1.2操作机液压控制系统的设计操作机在机构构型上通常采用解耦设计,将操作机主要功能分解成夹持、提升俯仰、水平移动、锻造缓冲、大车行走、夹钳旋转等6个相对独立的运动,这使得液压系统的设计也具有独立性。
基于ADAMS的液压破碎机液压系统仿真

安 徽 工 业 大 学 学 报
Jo h iU ie s yo e h oo y .f An u n v ri f c n lg t T
第 2卷 第 3 4 期
20 0 7年 7月
J l uy
2 0 07
c n e t n o i u lp ooy ig ic se o o etbih a d a ay e te vr a rttp n f h d a l o c pi fvr a rttpn ,d su sd h w t sa l n n lz h i u l p ooy ig o y rui o t s t c
液压破碎机是一种用于破碎 、 拆除的专用工程机械。 可以用于冶炼等各种炉窑清渣 , 抢险和修理, 并且广 泛应用于工业与民用建筑 、 道路建设 、 水力、 矿山、 市政工程等土石方施工 中。液压破碎机的各种主要动作是 通过液压缸的运动来实现 的, 其机械系统和液压系统之间有着密切的耦合关系。 机械系统承受液压系统输出
Hy r me h n c l mb n d Smu ain o d a l u h rBa e n AD d o c a i a Co i e i lt fHy r ui Cr s e s d o AMS o c
W r Du - i g CEN - n LUO i g U n m n , Yu wa , M n
析 的方法 , 出液压破碎机工作装 置斗杆液压举 升系统虚拟样机的一个分析 实例 。仿真结果表 明 , 给 破碎机在液压缸 的驱动下可 以完成工作过程中的主要动作 , 液压缸运行平稳 , 无较大 冲击。
关键词: D M ; A A S液压系统 ; 虚拟样机 ; 联合仿真
《2024年度无卡轴旋切机液压控制系统设计与仿真分析》范文
《无卡轴旋切机液压控制系统设计与仿真分析》篇一一、引言随着现代机械制造业的快速发展,无卡轴旋切机作为木材加工行业的重要设备,其性能的优劣直接影响到产品的质量和生产效率。
液压控制系统作为无卡轴旋切机的核心部分,其设计合理与否直接关系到设备的稳定性和工作效率。
因此,本文将重点探讨无卡轴旋切机液压控制系统的设计与仿真分析。
二、无卡轴旋切机液压控制系统设计1. 系统结构及工作原理无卡轴旋切机液压控制系统主要由液压泵、控制阀、执行元件和辅助元件等组成。
其中,液压泵为系统提供动力,控制阀负责调节和分配液压能,执行元件则实现具体的动作,辅助元件则包括油箱、过滤器、冷却器等,保障系统的正常运行。
2. 液压泵和马达的选择根据无卡轴旋切机的工作需求,选择合适的液压泵和马达是至关重要的。
一般而言,应选择高效率、低噪音的液压泵和具有高转矩、低速稳定的马达。
此外,还需考虑系统的压力和流量要求,以确保系统能够满足无卡轴旋切机的实际工作需求。
3. 控制阀的设计控制阀是无卡轴旋切机液压控制系统的核心部件,其性能直接影响到系统的稳定性和工作效率。
设计时,应考虑阀的响应速度、控制精度和可靠性等因素,以确保系统能够快速、准确地完成各种动作。
三、液压控制系统的仿真分析为了验证无卡轴旋切机液压控制系统的设计是否合理,需要进行仿真分析。
本文采用MATLAB/Simulink软件进行仿真分析。
1. 建立仿真模型根据无卡轴旋切机液压控制系统的结构和工作原理,建立相应的仿真模型。
模型中应包括液压泵、控制阀、执行元件等主要部件,以及油箱、过滤器等辅助元件。
2. 仿真结果分析通过仿真分析,可以得到无卡轴旋切机液压控制系统的压力、流量、速度等参数的变化情况。
通过对这些参数的分析,可以评估系统的性能和稳定性。
同时,还可以通过仿真分析优化系统的设计,提高系统的效率和可靠性。
四、结论本文对无卡轴旋切机液压控制系统进行了设计与仿真分析。
通过合理选择液压泵、马达和控制阀等部件,以及建立仿真模型进行仿真分析,可以评估系统的性能和稳定性。
液压系统建模与仿真分析课程设计 (2)

液压系统建模与仿真分析课程设计一、引言液压系统作为一种常见的动力传递方式,在机械领域得到了广泛的应用。
在设计和开发液压系统时,充分了解系统的特性和性能至关重要。
因此,液压系统建模与仿真分析是机械工程领域的重要学科之一,本文介绍了液压系统建模与仿真分析的课程设计。
二、液压系统建模2.1 液压系统的基本组成部分液压系统包括液压泵、液压缸、液压阀等多个组成部分。
在液压系统中,液压泵将机械能转化为液压能,经过一系列管路和元件转换后,再将液压能转化为机械能,从而完成机械运动。
2.2 液压系统的建模方式液压系统的建模方式分为符号法和数值法两种。
符号法建模主要依据流量平衡和能量平衡等原理,采用符号公式的方式对系统进行表示。
数值法建模采用数值计算的方式对系统进行模拟,通过求解系统的微分方程或者差分方程来得到系统的状态。
而在实际应用中,一些较为复杂的系统往往需要采用更为高级的数值计算方法进行建模。
三、液压系统仿真分析液压系统仿真分析是指利用计算机对液压系统进行虚拟实验,预测系统的性能和行为,对系统进行优化和改进的过程。
液压系统仿真分析能为液压系统的实际应用提供参考和指导,并在系统设计和开发阶段为工程师提供更加精确和可行的方案。
3.1 液压系统的仿真分析工具常见的液压系统仿真分析工具包括MATLAB、Simulink、AMESim等。
这些仿真工具都提供了一系列的仿真库和仿真模型,可以快速地对液压系统进行建模和仿真分析。
同时,这些仿真工具也具有界面友好、数据可视化等特点,方便工程师快速分析系统的性能和行为。
3.2 液压系统仿真分析的应用液压系统仿真分析是液压系统设计和开发中的重要工具之一。
通过液压系统仿真分析,可以对系统的运行情况进行预测和评估,并在可能的情况下对系统进行优化和改进。
同时,液压系统仿真分析也能为液压系统的维护和故障排除提供重要的参考和指导。
四、液压系统建模与仿真分析的案例分析为了更好地展示液压系统建模与仿真分析的应用,本文以液压式机械手臂为例进行案例分析。
煤矿掘进机液压管路仿真分析
煤矿掘进机液压管路仿真分析煤矿掘进机液压管路仿真分析摘要:本文通过对煤矿掘进机液压管路的仿真分析,探讨了液压管路在提高掘进机运行效率和稳定性方面的重要性。
首先介绍了煤矿掘进机和液压管路的基本概念,接着详细介绍了液压传动系统的结构和工作原理。
通过利用仿真软件,对煤矿掘进机液压管路进行建模和仿真,分析了管路中各个元件的工作状态,找出了管路中存在的问题,并提出相应的改进方法,最后给出了仿真结果和总结。
1.引言随着煤矿掘进机的快速发展,液压管路作为掘进机的重要组成部分,对于掘进机的运行效率和稳定性起着至关重要的作用。
因此,对煤矿掘进机液压管路进行仿真分析,对于提高掘进机的工作效率和安全性具有重要意义。
2.煤矿掘进机和液压管路概述2.1 煤矿掘进机概述煤矿掘进机,是在煤矿井下用于采掘煤矿的专用机械设备,具有高效、安全、节能等特点。
它主要由工作部分、传动部分和控制部分组成,其中液压传动系统是掘进机的核心部分。
2.2 液压管路概述液压管路是液压系统中负责传递动力和工作流体的管道系统。
它由油箱、泵、阀、油缸、管道等组成,通过液体的流动来实现对机械装置的控制。
3.液压传动系统的结构和工作原理3.1 液压传动系统的结构液压传动系统由液压泵、阀门、液压缸和液压管线等组成。
其中,液压泵负责将机械能转化为液压能,阀门用于控制液压流向和流量,液压缸将液压能转化为机械能。
3.2 液压传动系统的工作原理液压传动系统的工作原理是利用液体传递的压力来实现机械装置的运动和控制。
当液压泵工作时,通过泵入的液体产生一定的压力,经过阀门控制传递到液压缸,从而驱动机械装置工作。
4.煤矿掘进机液压管路的仿真分析4.1 煤矿掘进机液压管路的建模通过利用仿真软件对煤矿掘进机液压管路进行建模,将液压管路的各个元件分别建立模型,包括液压泵、阀门和液压缸等。
4.2 煤矿掘进机液压管路的仿真分析通过对煤矿掘进机液压管路进行仿真分析,可以模拟出管路在不同工况下的工作状态,包括压力、流量和速度等参数。
扒渣机液压系统详细设计方案20190811
扒渣机液压控制系统详细设计方案陕西亚琛液压控制技术有限公司目录1系统功能与组成 (4)2主要引用文件标准 (4)3液压系统设计说明 (5)3.1液压系统主要技术参数指标 (5)3.2液压系统功能要求 (5)3.3液压系统原理及概述 (6)3.4液压系统性能参数计算 (10)3.5系统液压元件选型 (14)4气压刹车系统设计说明.............................. 错误!未定义书签。
5电器设计及其选型. (16)5.1电器控制柜功能 (16)5.2电器元件选型 (16)6刹车控制系统 (17)6.1蓝油和气刹控制系统概述: (17)6.2红油控制系统概述:......................... 错误!未定义书签。
7供电需求.. (23)28安装调试及设备验收 (25)8.1包装及运输 (25)8.2安装调试 (25)8.3验收 (26)9售后服务及保障 (26)9.1维修性和安全性措施 (26)9.2售后服务 (27)9.3技术培训 (27)9.4设计图纸及技术文件清单 (27)参考资料GB/T 17446-1998 《流体传动系统及元件术语》;GB/T 3766-2001 《液压系统通用技术条件》;JB/T 10205-2000 《液压缸技术条件》;GB/T 15622-2005 《液压缸试验方法》;GB/T 14039-2002 《液压传动油液固体颗粒度等级代号》;JB/T 7938-1999 《液压泵站油箱公称容量系列》;GB/T 2351-1993 《液压气动系统用硬管外径和软管内径》;GB/T 7932-2003 《气动系统通用技术条件》;GB/T 14038-2008 《气动连接气口和螺柱端》;31系统功能与组成扒渣机液压控制系统主要完成扒渣机行进,掘进,姿态调整等功能。
扒渣机液压控制系统。
其中油源动力部分。
电器控制部分。
油源部分由以下四部分构成:⏹行走控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
整机质量 外形尺寸
总功率 爬坡能力 扒装范围 行走速度 一运输送形式 一运运输速度 运输能力 履带宽度 接地比压 最小转弯半径
12 600 kg 7 000 mm × 2 000 mm × 2 000 mm
55 kW ± 26° 2 600 mm × 4 200 mm × 2 100 mm 0 ~ 1 km / h 单链单驱动 1 m/s 120 m3 / h 380 mm 0. 12 MPa ≤7 m
关键词: 扒渣机; 液压系统; 建模与仿真 中图分类号: TD421. 4 文献标识码: A 文章编号: 1001 - 3881 ( 2013) 20 - 082 - 5
Design and Simulation of Hydraulic System for Cinder Scraper
YANG Lin,YANG Yang ( Chongqing Branch of Chinese Coal Research Institute,Chongqing 400039,China)
图 1 ZWY-120 /55L 型扒渣机结构简图 扒渣机特 殊 的 应 用 环 境 决 定 了 其 应 具 有 结 构 紧 凑、推进力大、扒取范围广、可以全断面装岩、不留 死角、不需人工辅助清理工作面等性能; 扒渣机的主 要动作宜采用液压先导控制,从而使系统操作轻松简 便,工作平稳无冲击,维修方便; 同时要具有优良的 人性化设计; 液压系统通过采用风冷的方式来减少扒 渣机水路系统和提高扒渣机的机动性能; 液压系统还 应具有行程超限、油温超高、油路堵塞、电机过载等 报警功能。要做到最大限度地减轻工人的劳动强度, 同时要保证掘进出矸的安全可靠性。
液压系统是扒渣机的核心系统,其性能的好坏直 接决定 了 扒 渣 机 的 工 作 效 率、操 作 性 能 及 使 用 寿 命[2]。作者介绍了 ZWY-120 /55L 型扒渣机的结构组 成及功能要求,分析了液压系统的常用控制方法; 在 此基础上对其液压系统进行了设计,并对各回路进 行了分析。利用 AMESim 软件构建了该液压系统的 仿真平台,并对该液压系统的动态特性进行了仿真 分析,为扒渣机液压系统的开发、应用和优化奠定 了基础。 1 扒渣机概述
2013 年 10 月 第 41 卷 第 20 期
机床与液压
MACHINE TOOL & HYDRAULICS
Oct. 2013 Vol. 41 No. 20
DOI: 10. 3969 / j. issn. 1001 - 3881. 2013. 20. 027
扒渣机液压系统设计与仿真分析
杨林,杨洋
( 中煤科工集团重庆研究院,重庆 400039)
1. 1 扒渣机组成及性能需求 ZWY-120 /55L 型 扒 渣 机 由 扒 臂 部、行 走 部、一
运部、机架部、液压系统和电控系统组成 ( 如图 1 所 示) 。其中扒装部由水平摆动基座、动臂、斗杆、铲 斗及相应的驱动油缸组成; 一运部由刮板输送链及一 运马达组成; 液压系统由泵站、多路阀、各执行机 构、控制手柄及冷却系统组成 。
Abstract: In order to meet the demands of the structure and functions,hydraulic system of the cinder scraper was designed on the basis of LUDV. Its simulation model was built,the simulation and analyses for the key components and the system static-dynamic performance were made. The results indicate that the designed hydraulic system is feasible and correct. It provides a basis for design and optimization of hydraulic system of the cinder scraper.
摘要: 针对 ZWY-120 /55L 型扒渣机结构组成及功能需求,进行了基于 LUDV 的扒渣机液压系统设计。利用 AMESim 模 块化仿真平台,建立了扒渣机液压系统的仿真模型,并进行了关键部件和系统动静态性能的仿真与分析。仿真结果验证了 液压系统的可行性和正确性,为扒渣机液压系统的设计与优化提供了依据。
收稿日期: 2012 - 10 - 08 作者简介: 杨林 ( 1981—) ,硕士研究生,主要从事煤矿工程机械研发工作。E - mail: 23793993@ qq. com。
Hale Waihona Puke 第 20 期杨林 等: 扒渣机液压系统设计与仿真分析
·83·
1. 2 主要技术参数 ZWY-120 /55L 型扒渣机主要技术参数见表 1,为
Keywords: Cinder scraper; Hydraulic system; Modeling and simulation
提高煤炭开采的机械化与自动化程度,提高采煤 机械的技术水平,走减人提效之路,是我国煤矿开采 的目标。而扒渣机是实现煤矿生产机械化和现代化的 重要设备之一。扒渣机是由机械手与输送机相接合, 采集和输送功能合二为一,采用电动液压控制的生产 装置,具有安全环保、能耗小、效率高的特点,是矿 山及小型隧洞井巷必不可少的先进掘进装备。扒渣机 的使用能大大地提高隧洞和井下巷道的掘进作业进 度,有效提高单进水平[1]。
2 液压系统设计 扒渣机的 工 作 过 程 包 括 下 列 几 个 非 连 续 性 的 运
动: 动臂升降、斗杆收放、铲斗转动、扒臂回转、整 机行走和其他辅助运动。通过动臂、斗杆、铲斗和扒 臂转台的运动可以实现扒装作业。由于作业对象和工 作条件的多变,扒渣机实现上述运动时的阻力在时刻 变化,这是扒渣机工况的一个特点。同时,为了满足 作业需要,提高作业效率,主机在工作过程中,往往 有多个动作同时进行,这就需要液压系统具有良好的 控制特性和动作协调性。 2. 1 液压系统控制方式的确定