基于MATLAB的液压系统的设计与仿真
MATLAB软件对液压破碎锤液压系统进行动态仿真
摘要液压破碎锤是工程机械的辅助机械,我国整个社会工业化进程尚未完成,大量的铁路、公路、水利基本建设正在和将要进行。
未来工程方面对各类现代化机械设备的需求将会越来越大,给液压破碎锤等提供了大量的市场机会。
因此要求对液压破碎锤性能上进行改进,提升产品的品质,能够提高工作效率,使其更有效的应用于工程建设。
本文分析了当今液压破碎锤的国内外现状及未来发展趋势,描述了液压破碎锤的研究现状和设计理论。
完成了着重两方面的研究:第一,对液压破碎锤的线性运动状态进行合理的假设和分析。
第二,利用MATLAB^件对液压破碎锤液压系统进行动态仿真和计算分析。
本论文工作注重理论研究,研究过程中取得的结果与实际相符合,为液压破碎锤的深入研究打下了良好基础。
关键词:液压破碎锤;运动状态;液压系统;动态仿真;MATLA计算分析AbstractThe hydraulic break ing hammer is assisted of Con structio n Mach in ery,our country as a whole has not yet completed the process of industrialization and a large number of railway,highway,water con serva ncywill be carried out.Future projects of all types of moder n machinery and equipment will be increasing on demanding for construction machinerysuch as hydraulic hammer to be provided a large number of market opportunities.Therefore,a hydraulic hammer will be improved performa nce.The maker will enhance the quality of their products,improve work efficiency and more effective so that it applies to engineering con struct ion.In this thesis,it an alyses the hydraulic break ing hammer of the curre nt status and future development of domestic and international trends,and describes the study of hydraulic break ing hammer of the curre nt situati on and desig n theory.The paper highlights two aspects of research Firstly,hydraulic breaking hammer of the state of linear movement and analysis of reas on able assumptio ns.Sec on dlythe use of software MATLAB to hydraulic break ing hammer of the hydraulic system modeli ng,simulatio n,calculatio n and an alysis.In this paper,it focus on the theoretical research,a nd the course of the study results would coin cide with the actual Hydraulic Breaker for the in-depth has laid a good foun datio n Key Words:Hydraulic break ing hamme; Moveme nt; Hydraulic system;Dyn amic simulati on;Calculatio n and an alysis of MATLAB目录附录3:MATLAB 解微分方程程序 .......................................... 错误!未定义书签。
基于Matlab_Simulink的液压缸建模与仿真
2003.
作者简介 : 何忠蛟 (1974 - ) ,讲师 ,毕业于浙江大学信息学院 , 硕士 ,从事光通信技术 、电子线路 、光机电一体化技术等研究 ,发表论 文 8 篇. Tel :0571 - 85976253 , E - Mail :he335577 @eyou. com.
线 ,不仅减少了试验工作量 ,降低试验费用 ,而且试 验数据可靠 ,其实用性和曲线拟合性均很好 ,极具推 广价值 。
参考文献 : [ 1 ]高镇同. 疲劳应用统计学[ M ] . 北京 :国防工业出饭社 ,1996. [ 2 ]何忠蛟 ,张志斌. 输送机减速器疲劳试验原理研究 [J ] . 煤矿机
械 ,2004 , (5) :43 - 45. [ 3 ]林毓钅奇 ,陈瀚 ,楼志文. 材料力学 [ M ] . 西安 : 西安交通大学出版
收稿日期 :2005204201
Research of Transporter Restarder Fatigue Curve Based on
Maximum Likelihood Method
HE Zhong - jiao ( Information and Electron Engineering College ,Zhejiang Industry and Trade University , Hangzhou 310035 ,China)
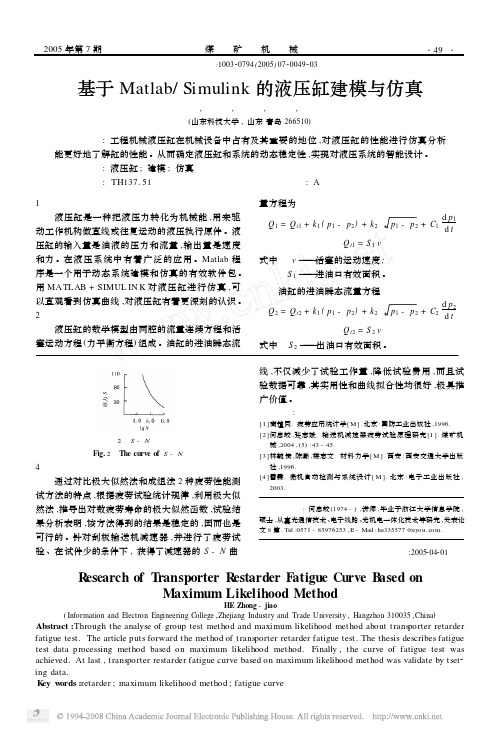
图 6 液压缸位移 x 与时间 t 的关系 Fig. 6 Relation of cylinder’s displacement x and time t
4 结语 从时间流速仿真图形可以看出 ,液压缸的流速
基于MATLAB simulink的液压系统动态仿真

汇报人:xxx
一、阀控液压系统缸简介
液压动力元件可以分为四种基本形式:阀控液压缸、阀控液压马达、泵控 液压缸和泵控液压马达。四种液压动力元件虽然结果不同,但其特性是类 似的。
阀控液压缸系统是工程上应用较广泛的传动和动力系统。由于阀控对称液
压缸系统比阀控非对称液压缸系统具有更好的控制特性,因此,在实际生 产中得到了广泛的应用,但是对称液压缸加工难度大,滑动摩擦阻力较大,
需要的运行空间也大,而非对称液压缸构造简单,制造容易。
四通阀控制对称液压缸是液压系统中一 种常用的液压动力元件 工作原理
如图1所示,四通滑阀控制液压缸拖 动带有弹性和粘性阻尼的负载作往复 运动。其中,假定供油压力Ps恒定, 回油压力P0近似为零。
图1 四通阀控制对称液压缸原理图
图2 常见四通阀图片
dxp
Vt dpL
2 d xp dxp 液压缸和负载 AppL mt 2 Bp Kxp FL 的力平衡方程: dt dt
三个基本方程经过拉氏变换得:
qL Kqxv KCpL dxp Vt dpL qL Ap CtppL dt 4 e dt d 2 xp dxp AppL mt 2 Bp Kxp FL dt dt
表1 仿真参数
仿真结果 (取样时间T=1s)
图4 系统压力P/Pa 图5 油缸输出力F/N
由仿真结果图得出:
可以看出系统的压力与液压缸的输出力从0逐渐上升,在t=0.5s时,系统达到 稳定状态,此时系统压力为 P=7.41×106 Pa,液压缸的输出力为F=5000 N, 符合预期设计要求
可以看出开始时,活塞杆的位移 很快达到2.8 mm且有振荡,随后 在系统达到稳定状态的过程中, 活塞杆的位移逐渐减小到0,这表 明活塞杆只在结构物破坏的一瞬 间有位移,其他时间活塞杆只输
基于MATLAB的液压仿真系统的研究_(3)

第四章液压系统仿真平台的建立系统仿真是一个资源、仿真、分析、可视化、通信与交互等功能的集成化运行环境[18],它具有以下特点:(1) 以数据库为核心,对包括工程、模型、算法、数据和多媒体对象等各种仿真资源进行统一资源管理;(2) 能支持多种仿真模型计算和多种应用问题求解,包括对动态和静态的、连续和离散的、结构化和随机的模型的仿真计算,使得各种工程和社会的应用问题都能在其上实现建模、运行、分析和可视化的功能;(3) 支持远程数据采集与通信,可利用现场工程数据进行实时仿真计算,并将仿真分析结果和参数返送到现场工控系统以实现对其监控和最优控制;(4) 支持直接运行其它仿真系统或与之进行数据交换,使仿真系统的功能进一步得到扩展和增强。
为实现这些功能和特点,我们在研究和实现方法上将一体化仿真的概念和原理概括成五个基本框架模型,即:信息结构模型、程序结构模型、网络与通信模型、系统互动模型、运行环境模型,并依据以上概念和模型构建开发了通用一体化仿真平台软件的原型系统。
前面三章,首先是基础知识的介绍,接下来应用电液相似原理的初步知识将液压系统理论中的有关概念转换为电理论的概念,在本章中就要进行程序系统搭建和仿真试验。
可以在一定的输入条件下根据某些系统参数的不同来测试对系统产生的影响,同时也可以根据不同的输入来测试模块仿真图的准确性。
将仿真系统和实际系统交互,首先可以建立精确数学模型,计算机采集数据后进行分析处理,研究高级控制算法、调整控制器参数以及建立寿命管理、专家诊断系统,实现设备监督和诊断功能等。
4.1 系统程序结构设计本文所设计的仿真平台的程序结构模型如图4-1所示。
初始区的功能是:设置界面,设置参数和变量,定义数组,设置仿真时间和步长,安排输出,配置仿真资源和生成实验框架。
动态区的功能是:构建模型和模型优化、在运行中解释模型、调用算法、按实验框架执行或终止计算、保存运行参数和计算结果数据等。
该区域由内部过程和函数、外部函数、控件和外部可执行程序组成,仿真平台系统的大部分算法和用户自定义功能是通过调用动态链接库的方式来实现。
毕业设计(论文)-基于MATLAB的液压系统的设计与仿真

各专业完整优秀毕业论文设计图纸西南交通大学本科毕业设计(论文)基于MATLAB的液压系统的设计与仿真摘要液压电梯是现代社会中一种重要的垂直运输工具,由于其具有机房设置灵活、对井道结构强度要求低、运行平稳、载重量大, 以及故障率低等优点, 在国内外中、低层建筑中的应用已相当普遍。
液压电梯是集机、电、液一体化的产品,是由多个相互独立又相互协调配合的单元构成,对液压电梯的开发研究涉及机械、液压及自动控制等多个领域。
本文在对液压电梯的实际工作情况做了详细分析后,假定了一个电梯具体的工作条件(包括电梯的最大负载和运行速度等),选定电梯轿厢的支承方式为双缸直顶式、支承液压缸为三级同步液压缸,并设计了满足条件的电梯液压系统。
然后根据电梯的工作条件和已设定参数,对各个液压元件进行了设计计算。
最后结合实际的情况和一些具体的产品,对液压元件的型号和尺寸的进行了确定。
在此基础上,本文对电梯液压系统进行了数学模型的建立,在建模过程中采用拓扑原理建立系统的数学模型,即先根据系统的总体结构建立液压系统的拓扑结构图,将系统分成若干个可以独立的子系统,然后再分别建立每个子系统的数学模型,最后再根据拓扑结构组合成整个大系统的数学模型。
在建立了系统数学模型后,对液压系统进行了仿真分析,得到了系统的速度、压力和位移曲线,这就更直观的反应了系统的运行过程。
根据仿真结果分析,液压缸在运行过程中速度振动较大,本论文将PID控制算法加入到系统中,采用积分分离PID控制方法对本液压系统进行了仿真分析,结果显示加入PID控制方法后系统稳定性得到了提高,具有良好的工作性能。
关键词:液压电梯;双缸直顶式;三级同步液压缸;动态仿真;PID控制目录第1章绪论 (1)1.1液压电梯的发展概况 ............................................................. 错误!未定义书签。
1.1.1 国外液压电梯的发展简况 ......................................... 错误!未定义书签。
《2024年基于AMESim的液压系统建模与仿真技术研究》范文
《基于AMESim的液压系统建模与仿真技术研究》篇一一、引言随着现代工业技术的不断发展,液压系统在各种机械设备中扮演着至关重要的角色。
为了更好地理解液压系统的性能,优化其设计,以及进行故障诊断和预测,建模与仿真技术显得尤为重要。
本文将介绍基于AMESim的液压系统建模与仿真技术研究,以期为相关领域的研发和应用提供有益的参考。
二、AMESim软件概述AMESim是一款功能强大的工程仿真软件,广泛应用于机械、液压、控制等多个领域。
它提供了一种直观的图形化建模环境,用户可以通过简单的拖拽和连接元件来构建复杂的系统模型。
此外,AMESim还支持多种物理领域的仿真分析,包括液压、气动、热力等。
三、液压系统建模在AMESim中,液压系统的建模主要包括以下几个方面:1. 液压元件建模:包括液压泵、液压马达、油缸、阀等元件的建模。
这些元件的模型可以根据实际需求进行参数设置和调整。
2. 流体属性设置:根据液压系统的实际工作情况,设置流体的属性,如密度、粘度等。
3. 系统拓扑结构构建:根据实际系统的结构,搭建系统拓扑结构,并设置各元件之间的连接关系。
4. 仿真参数设置:根据仿真需求,设置仿真时间、步长等参数。
四、液压系统仿真在完成液压系统的建模后,可以通过AMESim进行仿真分析。
仿真过程主要包括以下几个方面:1. 初始条件设置:设置系统的初始状态,如初始压力、流量等。
2. 仿真运行:根据设置的仿真时间和步长,运行仿真程序。
3. 结果分析:通过AMESim提供的可视化工具,分析仿真结果,如压力、流量、温度等参数的变化情况。
五、技术应用与优势基于AMESim的液压系统建模与仿真技术具有以下优势:1. 高效性:通过图形化建模环境,可以快速构建复杂的液压系统模型,提高建模效率。
2. 准确性:AMESim提供了丰富的物理模型和算法,可以准确模拟液压系统的实际工作情况。
3. 灵活性:用户可以根据实际需求,灵活地调整模型参数和仿真条件,以获得更符合实际的结果。
液压系统建模与仿真分析课程设计 (2)

液压系统建模与仿真分析课程设计一、引言液压系统作为一种常见的动力传递方式,在机械领域得到了广泛的应用。
在设计和开发液压系统时,充分了解系统的特性和性能至关重要。
因此,液压系统建模与仿真分析是机械工程领域的重要学科之一,本文介绍了液压系统建模与仿真分析的课程设计。
二、液压系统建模2.1 液压系统的基本组成部分液压系统包括液压泵、液压缸、液压阀等多个组成部分。
在液压系统中,液压泵将机械能转化为液压能,经过一系列管路和元件转换后,再将液压能转化为机械能,从而完成机械运动。
2.2 液压系统的建模方式液压系统的建模方式分为符号法和数值法两种。
符号法建模主要依据流量平衡和能量平衡等原理,采用符号公式的方式对系统进行表示。
数值法建模采用数值计算的方式对系统进行模拟,通过求解系统的微分方程或者差分方程来得到系统的状态。
而在实际应用中,一些较为复杂的系统往往需要采用更为高级的数值计算方法进行建模。
三、液压系统仿真分析液压系统仿真分析是指利用计算机对液压系统进行虚拟实验,预测系统的性能和行为,对系统进行优化和改进的过程。
液压系统仿真分析能为液压系统的实际应用提供参考和指导,并在系统设计和开发阶段为工程师提供更加精确和可行的方案。
3.1 液压系统的仿真分析工具常见的液压系统仿真分析工具包括MATLAB、Simulink、AMESim等。
这些仿真工具都提供了一系列的仿真库和仿真模型,可以快速地对液压系统进行建模和仿真分析。
同时,这些仿真工具也具有界面友好、数据可视化等特点,方便工程师快速分析系统的性能和行为。
3.2 液压系统仿真分析的应用液压系统仿真分析是液压系统设计和开发中的重要工具之一。
通过液压系统仿真分析,可以对系统的运行情况进行预测和评估,并在可能的情况下对系统进行优化和改进。
同时,液压系统仿真分析也能为液压系统的维护和故障排除提供重要的参考和指导。
四、液压系统建模与仿真分析的案例分析为了更好地展示液压系统建模与仿真分析的应用,本文以液压式机械手臂为例进行案例分析。
基于MATLAB的液压仿真系统的研究_(1)
东南大学硕士学位论文第二章 MATLAB及数据库技术在现代仿真中,业界现有集中主要的仿真软件如Witness,Labview,MATLAB,Flexsim 等,它们都是针对不同的领域而开发的平台。
在其中,MATLAB是专门针对系统仿真这个领域而开发的。
在本课题的研究中,借助于它的强大的支持,可以相对方便的建立模块并得出结果。
2.1 MATLAB2.1.1 MATLAB的历史MATLAB是由MathWorks公司于1984年推出的数学软件[9],其名称是由“矩阵实验室”(MATricLABoratory)所合成的,由此可知其最早的开发理念是提供一套非常完善的矩阵运算命令。
但随着数值计算需求的演变,MATLAB已经成为各种系统仿真、数字信号处理、科学可视化的标准语言。
MATLAB虽然在1984年首次推出商用版,但其前身早在1978年即已现身。
在早期的版本中,MATLAB以矩阵运算为主,但随着科学可视化的需求日增,于是在MATLAB第四版推出句柄图形(Handle Graphics),这是一个里程碑,自此之后,所有的Demo都包含友好的图形用户界面。
另一个里程碑则是在MATLAB第五版,允许用户建立许多不同的数据类型(如多维数组、结构数组、异质数组等),而不再只是局限于二维数组的矩阵而已。
MATLAB是一个计算核心,围绕这个计算核心,有许多针对不同应用所开发的应用程序,称为工具箱(Toolboxes),MathWorks本身所提供的工具箱大概有40多个,另外还有其他公司或研究所提供的工具箱,总数已达上百个之多。
除了MATLAB之外,MathWorks还有两项主要相关产品,即Simulink及Stateflow。
Simulink专用于连续或离散时间的动态系统仿真,Stateflow则用于仿真有限状态机或者事件驱动系统。
Simulink是一个仿真核心,围绕着这个核心所开发出的应用程序称为方块集。
从的发展过程来看,MathWorks的大方向已由纯粹的数值运算慢慢转到计算仿真与硬件实现的集成,尤其是现有Simulink与Stateflow的C 程序代码自动生成功能,以及将来的定点运算方块集与C程序代码至VHDL的自动转换功能,可以预见在不远的将来,从顶层的系统仿真到底层的芯片算法计算,都可以用MATLAB 相关的工具箱来实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西南交通大学本科毕业设计(论文)基于MATLAB的液压系统的设计与仿真摘要液压电梯是现代社会中一种重要的垂直运输工具,由于其具有机房设置灵活、对井道结构强度要求低、运行平稳、载重量大, 以及故障率低等优点, 在国内外中、低层建筑中的应用已相当普遍。
液压电梯是集机、电、液一体化的产品,是由多个相互独立又相互协调配合的单元构成,对液压电梯的开发研究涉及机械、液压及自动控制等多个领域。
本文在对液压电梯的实际工作情况做了详细分析后,假定了一个电梯具体的工作条件(包括电梯的最大负载和运行速度等),选定电梯轿厢的支承方式为双缸直顶式、支承液压缸为三级同步液压缸,并设计了满足条件的电梯液压系统。
然后根据电梯的工作条件和已设定参数,对各个液压元件进行了设计计算。
最后结合实际的情况和一些具体的产品,对液压元件的型号和尺寸的进行了确定。
在此基础上,本文对电梯液压系统进行了数学模型的建立,在建模过程中采用拓扑原理建立系统的数学模型,即先根据系统的总体结构建立液压系统的拓扑结构图,将系统分成若干个可以独立的子系统,然后再分别建立每个子系统的数学模型,最后再根据拓扑结构组合成整个大系统的数学模型。
在建立了系统数学模型后,对液压系统进行了仿真分析,得到了系统的速度、压力和位移曲线,这就更直观的反应了系统的运行过程。
根据仿真结果分析,液压缸在运行过程中速度振动较大,本论文将PID控制算法加入到系统中,采用积分分离PID控制方法对本液压系统进行了仿真分析,结果显示加入PID控制方法后系统稳定性得到了提高,具有良好的工作性能。
关键词:液压电梯;双缸直顶式;三级同步液压缸;动态仿真;PID控制目录第1章绪论 (1)1.1液压电梯的发展概况 ............................................................. 错误!未定义书签。
1.1.1 国外液压电梯的发展简况 ......................................... 错误!未定义书签。
1.1.2 国内液压电梯的发展简况 ......................................... 错误!未定义书签。
1.2 液压电梯工作原理概述 (1)1.3 液压电梯的技术特点 (2)1.3.1 液压电梯的性能要求 (2)1.3.2 液压电梯的优点 (2)1.3.3 液压电梯的缺点 (3)1.4 本论文的选题意义及研究内容 (3)1.4.1 本论文的选题意义 (3)1.4.2 本论文的研究内容 (4)第2章液压电梯的液压系统设计 (6)2.1设计背景及工况分析 (6)2.2 液压系统设计 (7)2.3 液压缸的设计 (9)2.3.1 同步伸缩液压缸的工作原理 (9)2.3.2 同步伸缩缸的参数计算 (10)2.3.3 缸盖和活塞头设计 (14)2.3.4 柱塞缸和各级活塞缸的长度计算 (17)2.3.5 液压缸的密封 (19)2.4 泵和电机的选择 (20)2.4.1 泵排量的计算 (20)2.4.2 电机的选择 (20)2.5 液压管路的设计 (21)2.5.1 管路内径的选择 (21)2.5.2 管道壁厚计算 (22)2.6 油箱设计 (22)2.7 过滤器的设计 (23)2.8 阀的选择 (23)2.8.1 单向阀的选择 (23)2.8.2 电磁溢流阀 (23)2.8.3 节流阀 (23)2.9 本章小结 (24)第3章电梯液压系统模型的建立 (25)3.1电梯上行的数学模型 (27)3.1.1 泵的数学模型 (27)3.1.2 单向阀的数学模型 (28)3.1.3 比例流量阀的数学模型 (28)3.1.4 液压桥的数学模型 (30)3.1.5 液控单向阀的模型 (31)3.1.6 液压缸的数学模型 (31)3.1.7 系统上行的模型 (34)3.2 电梯下行的数学模型 (35)3.3 本章小结 (37)第4章电梯液压系统的动态仿真 (38)4.1 simulink简介 (38)4.2电梯上行时液压系统的仿真分析 (39)4.2.1 供油子系统的仿真模型 (40)4.2.2 液压桥和液控单向阀组成调整子系统的仿真模型 (40)4.2.3 三级同步液压缸构成运行系统的仿真模型 (41)4.3 电梯上行液压系统的仿真 (45)4.3.1 电梯上行液压缸的速度曲线 (46)4.3.2 电梯上行液压缸的位移仿真曲线 (48)4.3.3 电梯上行液压缸各级缸筒压力仿真曲线 (48)4.4 本章小结 (49)第5章电梯液压系统的PID控制 (50)5.1 PID控制原理 (51)5.2 位置PID控制算法 (52)5.3 数字PID控制算法的该进 (53)5.4 液压电梯液压系统的PID控制器的设计与仿真 (55)5.4.1 PID控制器设计 (55)5.4.2 采样周期的确定 (56)5.4.3 PID控制器参数整定 (57)5.4.4 电梯液压系统PID控制器仿真 (57)5.5 本章小结 (63)结论与展望 ........................................................................................... 错误!未定义书签。
致谢 ................................................................................................... 错误!未定义书签。
参考文献 ............................................................................................... 错误!未定义书签。
第1章绪论1.2 液压电梯工作原理概述液压电梯作为除电动电梯之外的另外一个电梯种类,其工作原理和曳引电梯有很大的不同。
液压电梯是通过电力驱动的泵传递液压油到油缸,柱塞(或者活塞)通过直接或间接的方式作用于轿厢,实现轿厢上行:通过载荷和轿厢重力的作用使油缸中的液压油流回到油箱,实现轿厢下行[13]。
液压电梯的液压传动系统包括以下几个主要部件:(a)、液压泵站,即电机、油泵、油箱。
油泵是将电动机输入的机械能转化为流动油液的压力能。
油箱包括控温元件、滤油器、消音器及油管等辅件,以保证液压系统可靠、稳定、持久的工作;(b)、控制阀,它是由多种阀组合而成的控制阀块,控制液压油的流向、速度及加减速度,从而使轿厢达到良好的运行性能;(c)、油缸,动力执行元件,将油液的压力能转换为与其直接联接的轿厢运动机械能。
(d)、牵引装置,液压缸的运动,通过牵引装置来牵引电梯轿厢的运动。
轿厢的运动是由电力驱动的泵使具有压力的液压油通过控制阀和管路从油箱流入液压缸,或从液压缸流回油箱来实现的。
控制阀及油泵电机靠机房内的控制柜来控制。
液压电梯的控制系统是一个速度控制系统。
其工作过程是这样的:当液压电梯上行时,电机带动油泵迫使一部分油液进入油缸,推动柱塞以一定的加速度伸出油缸;接着油泵输出的油液全部进入油缸,轿厢以额定速度运行;当轿厢接近所选层站时,液压电梯捕捉到井道中的减速信号,通过控制系统进入油缸的油液减少,使轿厢以平层速度运行,通常在0.05-0.lm/s之间。
当轿厢与所选层站水平时,电梯又捕捉到井道中的停止信号,控制系统关闭所有的上行阀,随后油泵电机停止工作,电梯停在所选层站,同时液压控制系统中的单向阀阻止油液流回油箱,轿厢保持静止。
为了使轿厢下行,电器操纵的下行阀打开,靠轿厢重力及载荷使油液通过控制阀以一定的流量流回油箱,柱塞缩回到油缸中,从而实现轿厢下行,其加减速度与上行时基本相同[22]。
液压电梯与电动电梯相比,由于技术实现上完全不同,因此具有其本身的一些特点:液压系统功率重量比大,而且传送距离长,因此机房面积小且设置灵活;一般不带配重,因此减小了井道尺寸;载重可通过油缸直接作用在地基上,因此载重量大,而且井道不受力,降低了建筑费用。
上述特点使得液压电梯适合于中低层建筑(<40m)、大载重 (>1t)、旧屋改造等场合,如仓库、停车场、机场等等,或者在古典建筑、旧房中增设电梯。
因此,尽管液压电梯存在着提升高度低、速度低等局限性而受到曳引电梯的巨大挑战,但上述优势使得液压电梯依然在市场中占有可观的份额,而且技术的进步使其依然具有很好的发展前景。
1.3 液压电梯的技术特点1.3.1 液压电梯的性能要求电梯工业经过多年的发展,在电梯制造与安装安全规范、电梯技术条件、电梯试验方法、电梯钢丝绳、电梯轿厢、井道、轿厢等各方面都已形成各种严格的技术要求和安装规范,己形成统一的国家标准[11]。
液压电梯除了要满足这些要求外,在电梯性能方面,也需要满足以下几项指标:1)、安全可靠性、稳定性液压电梯作为一种载人的交通工具,安全性要求十分重要,电梯要求故障率小,应急设施齐全,在任何正常工况(负载变化、油温变化、电网扰动)下,均能按要求的运行曲线反复保持可靠地运行,不得有漏油现象。
2)、经济性液压电梯结构简单,装拆方便,维护费用低廉,是其保持强有力的市场竞争的根本。
3)、舒适性特别对于乘客液压电梯,其舒适性的好坏至关重要。
人们常常将上浮感、下沉感、不稳定感等统称为不舒适感,产生这种不舒适感的主要原因是人对垂直运动往往比较敏感,尤其是在电梯的加速或者减速段。
1.3.2 液压电梯的优点液压电梯与其它驱动方式(如曳引电梯)的垂直运输工具相比,具有以下优点[12]: 1)、机房设置灵活。
液压电梯靠油管传递动力,因此,机房位置可设置在离井道周围20m的范围内,且机房面积仅4-5m,,再也不需要用传统方式将机房设置在井道上部,可使建筑结构简化。
2)、井道结构强度要求较低。
因液压电梯轿厢自重及载重等垂直负荷均通过液压缸全部作用于地基上,对井道墙及顶部的建筑性能要求低。
3)、井道利用率高。
一般液压电梯不设置对重装置,故可提高井道面积的利用率。
相同规格的液压电梯要比曳引电梯的井道面积少12%。
4)、结构紧凑。
在相同主参数情况下,液压传动系统比曳引驱动系统的体积小、重量轻。
1.3.3 液压电梯的缺点由于输入功率、控制及结构等条件的限制,一般液压电梯的升程有限(40m),速度不高(lm/s以下)。
需要输入的功率大。
因为液压电梯不设配重,在额定载重量、额定速度及提升高度相同的情况下,液压电梯所需要的电机功率是曳引电梯的2.5-3倍,因为液压电梯配套的动力电路容量比曳引电梯大。
尽管液压电梯电机只在上行时工作,但其能量消耗至少为同等曳引电梯的2倍左右。
温度及载荷变化对液压电梯的起制动、加减速有一定的影响。