毕业设计(论文)-基于MATLAB的液压系统的设计与仿真
基于Matlab_Simulink的液压缸建模与仿真
2003.
作者简介 : 何忠蛟 (1974 - ) ,讲师 ,毕业于浙江大学信息学院 , 硕士 ,从事光通信技术 、电子线路 、光机电一体化技术等研究 ,发表论 文 8 篇. Tel :0571 - 85976253 , E - Mail :he335577 @eyou. com.
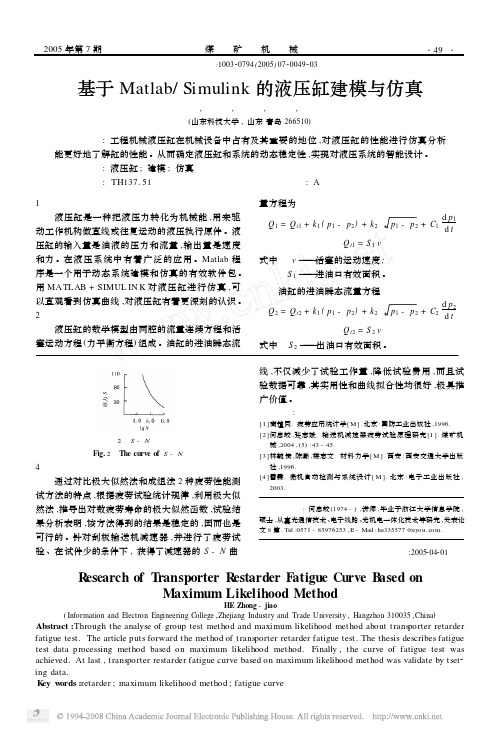
线 ,不仅减少了试验工作量 ,降低试验费用 ,而且试 验数据可靠 ,其实用性和曲线拟合性均很好 ,极具推 广价值 。
参考文献 : [ 1 ]高镇同. 疲劳应用统计学[ M ] . 北京 :国防工业出饭社 ,1996. [ 2 ]何忠蛟 ,张志斌. 输送机减速器疲劳试验原理研究 [J ] . 煤矿机
械 ,2004 , (5) :43 - 45. [ 3 ]林毓钅奇 ,陈瀚 ,楼志文. 材料力学 [ M ] . 西安 : 西安交通大学出版
收稿日期 :2005204201
Research of Transporter Restarder Fatigue Curve Based on
Maximum Likelihood Method
HE Zhong - jiao ( Information and Electron Engineering College ,Zhejiang Industry and Trade University , Hangzhou 310035 ,China)
图 6 液压缸位移 x 与时间 t 的关系 Fig. 6 Relation of cylinder’s displacement x and time t
4 结语 从时间流速仿真图形可以看出 ,液压缸的流速
基于MATLAB的液压仿真系统的研究_(3)

第四章液压系统仿真平台的建立系统仿真是一个资源、仿真、分析、可视化、通信与交互等功能的集成化运行环境[18],它具有以下特点:(1) 以数据库为核心,对包括工程、模型、算法、数据和多媒体对象等各种仿真资源进行统一资源管理;(2) 能支持多种仿真模型计算和多种应用问题求解,包括对动态和静态的、连续和离散的、结构化和随机的模型的仿真计算,使得各种工程和社会的应用问题都能在其上实现建模、运行、分析和可视化的功能;(3) 支持远程数据采集与通信,可利用现场工程数据进行实时仿真计算,并将仿真分析结果和参数返送到现场工控系统以实现对其监控和最优控制;(4) 支持直接运行其它仿真系统或与之进行数据交换,使仿真系统的功能进一步得到扩展和增强。
为实现这些功能和特点,我们在研究和实现方法上将一体化仿真的概念和原理概括成五个基本框架模型,即:信息结构模型、程序结构模型、网络与通信模型、系统互动模型、运行环境模型,并依据以上概念和模型构建开发了通用一体化仿真平台软件的原型系统。
前面三章,首先是基础知识的介绍,接下来应用电液相似原理的初步知识将液压系统理论中的有关概念转换为电理论的概念,在本章中就要进行程序系统搭建和仿真试验。
可以在一定的输入条件下根据某些系统参数的不同来测试对系统产生的影响,同时也可以根据不同的输入来测试模块仿真图的准确性。
将仿真系统和实际系统交互,首先可以建立精确数学模型,计算机采集数据后进行分析处理,研究高级控制算法、调整控制器参数以及建立寿命管理、专家诊断系统,实现设备监督和诊断功能等。
4.1 系统程序结构设计本文所设计的仿真平台的程序结构模型如图4-1所示。
初始区的功能是:设置界面,设置参数和变量,定义数组,设置仿真时间和步长,安排输出,配置仿真资源和生成实验框架。
动态区的功能是:构建模型和模型优化、在运行中解释模型、调用算法、按实验框架执行或终止计算、保存运行参数和计算结果数据等。
该区域由内部过程和函数、外部函数、控件和外部可执行程序组成,仿真平台系统的大部分算法和用户自定义功能是通过调用动态链接库的方式来实现。
基于Simulink组合机床液压系统设计与仿真
c l d rpso a h p rmee aibe ( ipa e n,v lct c a gn i i yi e i nSe c aa trv r ls d s lc me t eo i h n ig w t tme.h n te e c r e ee a ay e , n t a y) h T e h s u sw r n lzd v
mo e a sa l h d .Usn d lw se tbi e s i g MAT AB t o i l k f r smu ai n a a y i wo l a n d s v r l c r e f h d a l L o ]S mu i o i l t n lss n o u d g i e e e a u v s o y r u i c
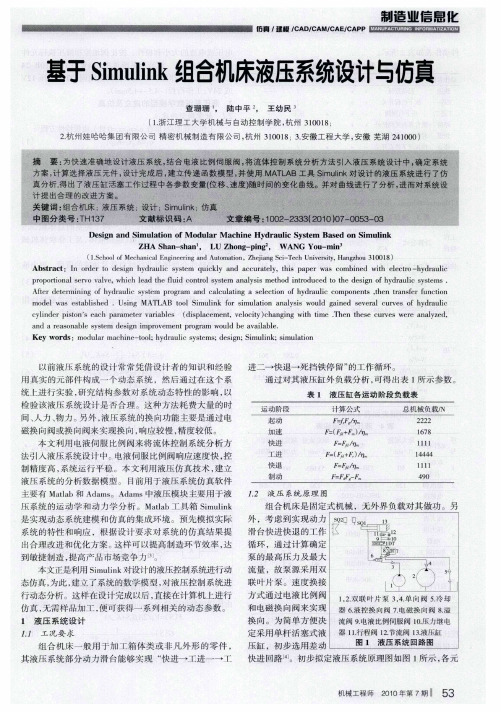
磁 换 向 阀或换 向阀来 实 现换 向 , 响应 较慢 , 度较 低 。 精 本 文 利 用 电液 伺 服 比例 阀来将 流 体 控 制 系统 分 析 方 法 引入 液 压 系统 设计 中。电 液伺 服 比例 阀响应 速 度快 , 控
制 精度 高 , 统运 行 平 稳 。本 文 利 用液 压 仿 真技 术 , 立 系 建
Z HA h n s a 。 LU o g p n W ANG u mi 3 S a - h n’ Zh n - i g , Yo - n
(.co l f ca i l n ier gadA tma o Z ein c— ehUnvri , n zo 10 8 1 ho o Meh nc gnei n uo t n, hj gS iT c i sy Haghu3 0 1 ) S aE n i a e t
a d a r a o a l y t m e in i r v me tp o r m u d b v i b e n e s n b e s s e d sg mp o e n r g a wo l e a al l . a Ke r s y wo d :mo u a c i e t o ; y r u i y t ms d sg ; i l k smu ai n d lr ma h n - o l h d a l s se ; e in S mu i , i l t c n o
基于MATLAB液位控制系统的设计与仿真开题报告

CQWU/JL/JWB/ZY012-14毕业论文(设计)开题报告论文(设计)题目:基于MTLAB液位控制系统的设计与仿真系别:电子电气工程学院年级:2009级专业(班):电气工程与自动化学号:学生姓名:指导教师:2012年10月10日重庆文理学院本科毕业论文(设计)开题报告题目基于MATLAB液位控制系统的设计与仿真系(院)专业电子电气工程学院电气工程与自动化年级开题日期2012-10-26学号姓名指导教师1、选题目的和意义:水箱控制系统正在为化工、电力、冶金、轻工、建材、核能等工业生产中各种最有优济指标、提高经济效益、节约能源、改善劳动条件、保护生态环境等方面起着越来越大的作用。
而现在MATLAB仿真软件在许多学科领域中已成为工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域研究和应用开发的基本工具和首选平台。
在MATLAB工具箱中,把模糊推理系统的各部分作为一个整体,提供了模糊推理系统数据结构管理函数,用以完成模糊规则的建立、解析与修改,模糊推理系统的建立、修改和存储管理以及模糊推理的计算及去模糊化等操作。
本仿真系统充分运用MATLAB/Simulink中模糊逻辑控制箱(Fuzzy logic Toolbox),利用模糊控制(Fuzzy Logic Control)和PID控制设计中的作用及优点使得用此次设计的系统完全可以通过Simulink的图形化界面进行,这样的结合使得一个比较复杂的水箱液位控制系统设计变得比较简单并直观。
并通过计算机软件MATLAB的仿真,综合地应用了各种专业技能知识,熟悉了模糊控制系统(Fuzzy Control System)和PID控制系统的设计方法及MATLAB仿真方法;提高电气工程与自动化专业的系统性、科学性、及全面性的设计素质;开拓自身的设计思路,增强理论知识与实践相结合的能力。
2、国内外研究现状综述:MATLAB研究现状MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
液压系统建模和仿真SimHydraulics

液压系统建模和仿真SimHydraulics--液压系统建模和仿真SimHydraulics是液压传动和控制系统的建模和仿真工具,扩展了Simulink?的功能。
使用这个工具可以建立起含有液压和机械元件的物理网络模型,可用于跨专业领域系统的建模。
SimHydraulics提供了构成液压系统的元器件模块库,库中也包括了用于构造其它元件的基本元素模块。
SimHydraulics适用于汽车,航空,国防和工业装备等领域中的各种应用,例如自动变速器,舵面操纵系统和重载驱动装置的建模分析。
SimHydraulics同SimMechanics,SimDriveline和SimPowerSystems一同使用,能够支持对复杂机液系统和电液系统的建模,以分析他们相互交联的影响。
主要功能液压和液压机械系统的物理建模环境超过75个液压和机械元器件模型,包括泵,阀,蓄能器和管路基本液压构造元素库,还有基本机械和运算单元可定制的常用液压流体工作介质SimHydraulics可在Simulink下建立液压系统回路的网络模型,模型表达基于ISO1219流体传动系统标准,并且建立的模型可以同机械和控制器模型相结合。
机械液压和液压系统网络建模使用SimHydraulics可以建立起完整的液压系统模型,过程如同组建一个真实的物理系统。
SimHydraulics使用物理网络方式构建模型:每个建模模块对应真实的液压元器件,诸如油泵,液压马达和控制阀;元件模块之间以代表动力传输管路的线条连接。
这样,就可以通过直接描述物理构成搭建模型,而不是从基本的数学方程做起。
SimHydraulics库提供了75个以上的流体和液压机械元件,包括油泵,油缸,蓄能器,液压管路和一维机构单元,大部分商品化元器件都可以找到对应模型。
SimHydraulics的模型符号符合ISO1219流体动力系统标准,SimHydraulics可以自动从模型原理图综合出描述系统行为特征的方程组。
基于MATLAB/Simulink液压伺服系统辨识仿真
模型参数 , 验证模型的准确性 。该仿真研究对建立精确模型及控制 系统研究有参考意义。 关键 词 : 对称缸 液压 伺服 系统 ; 线 性化 ; MA T A L B / S i m u l i n k ; 最小二 乘 法
中 图分类 号 : T H1 3 7 文献标 志码 : B 文 章编 号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 5 ) 1 0 - 0 1 2 0 - 0 4
1 2 O
d o i : 1 0 . 1 1 8 3 2 / j . i s s n . 1 0 0 0 - 4 8 5 8 . 2 0 1 5 . 1 0 . 0 2 8
液压 与 气动
2 0 1 5年 第 1 O期
基 于 MAT L A B / S i mu l i n k液 压 伺 服 系 统 辨 识 仿 真
s i mu l a t e o n MATALB/ Si mu l i n k wi t h t h e l e a s t s q u a r e me t h o d .Th e s t u d y p r o v i d e s a r e f e r e n c e f o r e s t a b l i s hi n g a c c u — r a t e mo de l a nd r e s e a r c h o n c o n t r o l s y s t e ms .
Ab s t r a c t :Ai mi n g a t t h e s y mme t r i c a l h y d r a u l i c s e r v o — s y s t e m ,we e s t a b l i s h i t s l i n e a r i z a t i o n ma t h e ma t i c a l mo d e l a n d
基于MATLAB的液压仿真系统的研究_(1)
东南大学硕士学位论文第二章 MATLAB及数据库技术在现代仿真中,业界现有集中主要的仿真软件如Witness,Labview,MATLAB,Flexsim 等,它们都是针对不同的领域而开发的平台。
在其中,MATLAB是专门针对系统仿真这个领域而开发的。
在本课题的研究中,借助于它的强大的支持,可以相对方便的建立模块并得出结果。
2.1 MATLAB2.1.1 MATLAB的历史MATLAB是由MathWorks公司于1984年推出的数学软件[9],其名称是由“矩阵实验室”(MATricLABoratory)所合成的,由此可知其最早的开发理念是提供一套非常完善的矩阵运算命令。
但随着数值计算需求的演变,MATLAB已经成为各种系统仿真、数字信号处理、科学可视化的标准语言。
MATLAB虽然在1984年首次推出商用版,但其前身早在1978年即已现身。
在早期的版本中,MATLAB以矩阵运算为主,但随着科学可视化的需求日增,于是在MATLAB第四版推出句柄图形(Handle Graphics),这是一个里程碑,自此之后,所有的Demo都包含友好的图形用户界面。
另一个里程碑则是在MATLAB第五版,允许用户建立许多不同的数据类型(如多维数组、结构数组、异质数组等),而不再只是局限于二维数组的矩阵而已。
MATLAB是一个计算核心,围绕这个计算核心,有许多针对不同应用所开发的应用程序,称为工具箱(Toolboxes),MathWorks本身所提供的工具箱大概有40多个,另外还有其他公司或研究所提供的工具箱,总数已达上百个之多。
除了MATLAB之外,MathWorks还有两项主要相关产品,即Simulink及Stateflow。
Simulink专用于连续或离散时间的动态系统仿真,Stateflow则用于仿真有限状态机或者事件驱动系统。
Simulink是一个仿真核心,围绕着这个核心所开发出的应用程序称为方块集。
从的发展过程来看,MathWorks的大方向已由纯粹的数值运算慢慢转到计算仿真与硬件实现的集成,尤其是现有Simulink与Stateflow的C 程序代码自动生成功能,以及将来的定点运算方块集与C程序代码至VHDL的自动转换功能,可以预见在不远的将来,从顶层的系统仿真到底层的芯片算法计算,都可以用MATLAB 相关的工具箱来实现。
基于MATLAB的液压伺服系统的仿真研究
丫
检测器 I
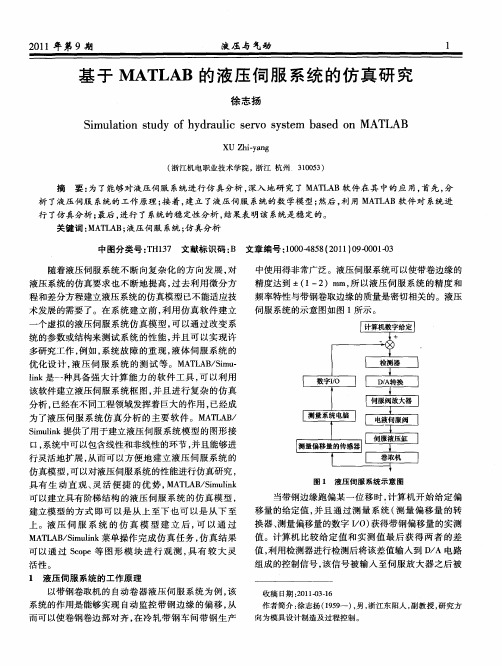
lk i 是一种具备强大计算能力的软件工 具 , 以利用 n 可 该 软件 建立 液压 伺服 系 统 框 图 , 且进 行 复杂 的仿 真 并 分析 , 已经在不同工程领域发挥着巨大的作用 , 已经成
为 了液 压伺 服 系 统 仿 真 分 析 的主 要 软 件 。M T A / A LB SI l k提 供 了用 于建立 液压 伺 服 系统 模 型 的 图形 接 iui n n 口, 系统 中可 以包 含线性 和 非线性 的环节 , 并且 能够 进 行灵活地扩展 , 从而可以方便地建立液压伺服系统的
XU iy n Zh — a g
( 江机 电职 业 技 术 学 院 , 江 杭 州 浙 浙
305) 10 3
摘 要 : 了能够 对液 压伺服 系统进 行 仿 真 分析 , 入 地研 究 了 MA L B软 件在 其 中的 应 用 , 先 , 为 深 TA 首 分 析 了液压 伺服 系统 的 工作 原 理 ; 着 , 接 建立 了液 压 伺服 系统 的数 学模 型 ; 然后 , 用 M T A 利 A L B软 件对 系统进
方 向 和流量 大小 , 终能 够完 成伺 服液 压 缸 的移动 , 最 进 而 带动 带钢 边缘 的移动 , 到控 制 带 钢 边 缘 的跑 偏 量 达 的 目的 。如 果 带钢 边缘 的位 移 量 等 于 给 定 值 , 测 值 实
一
精度达到 ± 1 2 m, 以液压伺 服系统 的精度和 ( — )m 所 频率特性与带钢卷取边缘的质量是密切相关的。液压
伺 服 系统 的示 意 图如 图 1 示 。 所
计算机数 拟 的液压 伺服 系 统 仿 真模 型 , 以通 过 改 变 系 可
统 的参数 或结 构 来测 试 系 统 的性 能 , 且 可 以实 现许 并 多研 究 工作 , 例如 , 统 故 障 的重 现 , 体 伺 服 系 统 的 系 液 优 化设 计 , 压 伺 服 系 统 的测 试 等 。MA L B Sm — 液 T A / iu
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
各专业完整优秀毕业论文设计图纸西南交通大学本科毕业设计(论文)基于MATLAB的液压系统的设计与仿真摘要液压电梯是现代社会中一种重要的垂直运输工具,由于其具有机房设置灵活、对井道结构强度要求低、运行平稳、载重量大, 以及故障率低等优点, 在国内外中、低层建筑中的应用已相当普遍。
液压电梯是集机、电、液一体化的产品,是由多个相互独立又相互协调配合的单元构成,对液压电梯的开发研究涉及机械、液压及自动控制等多个领域。
本文在对液压电梯的实际工作情况做了详细分析后,假定了一个电梯具体的工作条件(包括电梯的最大负载和运行速度等),选定电梯轿厢的支承方式为双缸直顶式、支承液压缸为三级同步液压缸,并设计了满足条件的电梯液压系统。
然后根据电梯的工作条件和已设定参数,对各个液压元件进行了设计计算。
最后结合实际的情况和一些具体的产品,对液压元件的型号和尺寸的进行了确定。
在此基础上,本文对电梯液压系统进行了数学模型的建立,在建模过程中采用拓扑原理建立系统的数学模型,即先根据系统的总体结构建立液压系统的拓扑结构图,将系统分成若干个可以独立的子系统,然后再分别建立每个子系统的数学模型,最后再根据拓扑结构组合成整个大系统的数学模型。
在建立了系统数学模型后,对液压系统进行了仿真分析,得到了系统的速度、压力和位移曲线,这就更直观的反应了系统的运行过程。
根据仿真结果分析,液压缸在运行过程中速度振动较大,本论文将PID控制算法加入到系统中,采用积分分离PID控制方法对本液压系统进行了仿真分析,结果显示加入PID控制方法后系统稳定性得到了提高,具有良好的工作性能。
关键词:液压电梯;双缸直顶式;三级同步液压缸;动态仿真;PID控制目录第1章绪论 (1)1.1液压电梯的发展概况 ............................................................. 错误!未定义书签。
1.1.1 国外液压电梯的发展简况 ......................................... 错误!未定义书签。
1.1.2 国内液压电梯的发展简况 ......................................... 错误!未定义书签。
1.2 液压电梯工作原理概述 (1)1.3 液压电梯的技术特点 (2)1.3.1 液压电梯的性能要求 (2)1.3.2 液压电梯的优点 (2)1.3.3 液压电梯的缺点 (3)1.4 本论文的选题意义及研究内容 (3)1.4.1 本论文的选题意义 (3)1.4.2 本论文的研究内容 (4)第2章液压电梯的液压系统设计 (6)2.1设计背景及工况分析 (6)2.2 液压系统设计 (7)2.3 液压缸的设计 (9)2.3.1 同步伸缩液压缸的工作原理 (9)2.3.2 同步伸缩缸的参数计算 (10)2.3.3 缸盖和活塞头设计 (14)2.3.4 柱塞缸和各级活塞缸的长度计算 (17)2.3.5 液压缸的密封 (19)2.4 泵和电机的选择 (20)2.4.1 泵排量的计算 (20)2.4.2 电机的选择 (20)2.5 液压管路的设计 (21)2.5.1 管路内径的选择 (21)2.5.2 管道壁厚计算 (22)2.6 油箱设计 (22)2.7 过滤器的设计 (23)2.8 阀的选择 (23)2.8.1 单向阀的选择 (23)2.8.2 电磁溢流阀 (23)2.8.3 节流阀 (23)2.9 本章小结 (24)第3章电梯液压系统模型的建立 (25)3.1电梯上行的数学模型 (27)3.1.1 泵的数学模型 (27)3.1.2 单向阀的数学模型 (28)3.1.3 比例流量阀的数学模型 (28)3.1.4 液压桥的数学模型 (30)3.1.5 液控单向阀的模型 (31)3.1.6 液压缸的数学模型 (31)3.1.7 系统上行的模型 (34)3.2 电梯下行的数学模型 (35)3.3 本章小结 (37)第4章电梯液压系统的动态仿真 (38)4.1 simulink简介 (38)4.2电梯上行时液压系统的仿真分析 (39)4.2.1 供油子系统的仿真模型 (40)4.2.2 液压桥和液控单向阀组成调整子系统的仿真模型 (40)4.2.3 三级同步液压缸构成运行系统的仿真模型 (41)4.3 电梯上行液压系统的仿真 (45)4.3.1 电梯上行液压缸的速度曲线 (46)4.3.2 电梯上行液压缸的位移仿真曲线 (48)4.3.3 电梯上行液压缸各级缸筒压力仿真曲线 (48)4.4 本章小结 (49)第5章电梯液压系统的PID控制 (50)5.1 PID控制原理 (51)5.2 位置PID控制算法 (52)5.3 数字PID控制算法的该进 (53)5.4 液压电梯液压系统的PID控制器的设计与仿真 (55)5.4.1 PID控制器设计 (55)5.4.2 采样周期的确定 (56)5.4.3 PID控制器参数整定 (57)5.4.4 电梯液压系统PID控制器仿真 (57)5.5 本章小结 (63)结论与展望 ........................................................................................... 错误!未定义书签。
致谢 ................................................................................................... 错误!未定义书签。
参考文献 ............................................................................................... 错误!未定义书签。
第1章绪论1.2 液压电梯工作原理概述液压电梯作为除电动电梯之外的另外一个电梯种类,其工作原理和曳引电梯有很大的不同。
液压电梯是通过电力驱动的泵传递液压油到油缸,柱塞(或者活塞)通过直接或间接的方式作用于轿厢,实现轿厢上行:通过载荷和轿厢重力的作用使油缸中的液压油流回到油箱,实现轿厢下行[13]。
液压电梯的液压传动系统包括以下几个主要部件:(a)、液压泵站,即电机、油泵、油箱。
油泵是将电动机输入的机械能转化为流动油液的压力能。
油箱包括控温元件、滤油器、消音器及油管等辅件,以保证液压系统可靠、稳定、持久的工作;(b)、控制阀,它是由多种阀组合而成的控制阀块,控制液压油的流向、速度及加减速度,从而使轿厢达到良好的运行性能;(c)、油缸,动力执行元件,将油液的压力能转换为与其直接联接的轿厢运动机械能。
(d)、牵引装置,液压缸的运动,通过牵引装置来牵引电梯轿厢的运动。
轿厢的运动是由电力驱动的泵使具有压力的液压油通过控制阀和管路从油箱流入液压缸,或从液压缸流回油箱来实现的。
控制阀及油泵电机靠机房内的控制柜来控制。
液压电梯的控制系统是一个速度控制系统。
其工作过程是这样的:当液压电梯上行时,电机带动油泵迫使一部分油液进入油缸,推动柱塞以一定的加速度伸出油缸;接着油泵输出的油液全部进入油缸,轿厢以额定速度运行;当轿厢接近所选层站时,液压电梯捕捉到井道中的减速信号,通过控制系统进入油缸的油液减少,使轿厢以平层速度运行,通常在0.05-0.lm/s之间。
当轿厢与所选层站水平时,电梯又捕捉到井道中的停止信号,控制系统关闭所有的上行阀,随后油泵电机停止工作,电梯停在所选层站,同时液压控制系统中的单向阀阻止油液流回油箱,轿厢保持静止。
为了使轿厢下行,电器操纵的下行阀打开,靠轿厢重力及载荷使油液通过控制阀以一定的流量流回油箱,柱塞缩回到油缸中,从而实现轿厢下行,其加减速度与上行时基本相同[22]。
液压电梯与电动电梯相比,由于技术实现上完全不同,因此具有其本身的一些特点:液压系统功率重量比大,而且传送距离长,因此机房面积小且设置灵活;一般不带配重,因此减小了井道尺寸;载重可通过油缸直接作用在地基上,因此载重量大,而且井道不受力,降低了建筑费用。
上述特点使得液压电梯适合于中低层建筑(<40m)、大载重 (>1t)、旧屋改造等场合,如仓库、停车场、机场等等,或者在古典建筑、旧房中增设电梯。
因此,尽管液压电梯存在着提升高度低、速度低等局限性而受到曳引电梯的巨大挑战,但上述优势使得液压电梯依然在市场中占有可观的份额,而且技术的进步使其依然具有很好的发展前景。
1.3 液压电梯的技术特点1.3.1 液压电梯的性能要求电梯工业经过多年的发展,在电梯制造与安装安全规范、电梯技术条件、电梯试验方法、电梯钢丝绳、电梯轿厢、井道、轿厢等各方面都已形成各种严格的技术要求和安装规范,己形成统一的国家标准[11]。
液压电梯除了要满足这些要求外,在电梯性能方面,也需要满足以下几项指标:1)、安全可靠性、稳定性液压电梯作为一种载人的交通工具,安全性要求十分重要,电梯要求故障率小,应急设施齐全,在任何正常工况(负载变化、油温变化、电网扰动)下,均能按要求的运行曲线反复保持可靠地运行,不得有漏油现象。
2)、经济性液压电梯结构简单,装拆方便,维护费用低廉,是其保持强有力的市场竞争的根本。
3)、舒适性特别对于乘客液压电梯,其舒适性的好坏至关重要。
人们常常将上浮感、下沉感、不稳定感等统称为不舒适感,产生这种不舒适感的主要原因是人对垂直运动往往比较敏感,尤其是在电梯的加速或者减速段。
1.3.2 液压电梯的优点液压电梯与其它驱动方式(如曳引电梯)的垂直运输工具相比,具有以下优点[12]: 1)、机房设置灵活。
液压电梯靠油管传递动力,因此,机房位置可设置在离井道周围20m的范围内,且机房面积仅4-5m,,再也不需要用传统方式将机房设置在井道上部,可使建筑结构简化。
2)、井道结构强度要求较低。
因液压电梯轿厢自重及载重等垂直负荷均通过液压缸全部作用于地基上,对井道墙及顶部的建筑性能要求低。
3)、井道利用率高。
一般液压电梯不设置对重装置,故可提高井道面积的利用率。
相同规格的液压电梯要比曳引电梯的井道面积少12%。
4)、结构紧凑。
在相同主参数情况下,液压传动系统比曳引驱动系统的体积小、重量轻。
1.3.3 液压电梯的缺点由于输入功率、控制及结构等条件的限制,一般液压电梯的升程有限(40m),速度不高(lm/s以下)。
需要输入的功率大。
因为液压电梯不设配重,在额定载重量、额定速度及提升高度相同的情况下,液压电梯所需要的电机功率是曳引电梯的2.5-3倍,因为液压电梯配套的动力电路容量比曳引电梯大。
尽管液压电梯电机只在上行时工作,但其能量消耗至少为同等曳引电梯的2倍左右。