第四章自动驾驶仪及控制规律
北京航空航天大学航空航天概论课件第四章 机载设备
3、测距差无线电导航 为飞行器提供经纬度位置。 甚低频,10KHz~14KHz,作用距离约1000Km以上。
C
A
B
4.2.2 惯性导航系统 惯性导航是通过安装在飞行器上的加速度计测量 飞行器的加速度经运算处理而获得飞行器当时的速度 和位置的方法进行导航的。 由于不依赖外界信息,所以是完全自主导航。 完全自主导航 由于测量误差随时间积累,要求制造精度高,或 加其它方法修正。 平台式惯导: X,Y 两个加速度计安装在陀螺平台上。 优点是陀螺平台不受飞机姿态的影响。 捷联式惯导:在飞机不同部位上安装多个加速度计, 测量轴与机体轴一致,对测量的参数进 行姿态修正后经计算得出导航参数。
(1) 仪表着陆系统
下滑信标 组成下滑面
跑道 航向信标组成航向面
航向信标:与跑道中心线相垂直的无线电方向航道信号 下滑信标:与跑道成 一定仰角的无线电下滑航道信号 指点信标:提供至跑道端头距离的地标位置信号
航向台
跑道
90Hz
150Hz
外指点信标
中指点信标
内指点信标
1公里 6.44--11.27公里
2. 微波着陆系统 以很窄的薄片形波束在一定范围内来回扫描, 飞机通过两次收到信号的时间间隔计算出自己的方 位和仰角。 航向扫描 俯仰扫描
4.4
其它机载设备
4.4.1 雷达设备 通过天线发射无线电波并接收被测物体的回波来 确定标的位置和速度。 合成孔径雷达和相控阵雷达。
B
C
D
A
4.4.3 防护和救生系统 1、座舱环境控制系统 座舱通风,温度、气压、氧气含量等控制 2、飞行员个体防护系统 个体防护包括:飞行服、抗过载服、氧气面罩 头盔等设备。
4.2.3 卫星导航系统 美国卫星全球定位系统GPS 俄罗斯全球导航卫星网Glonass 欧洲空间局“伽利略”导航卫星系统 中国“北斗”导航定位卫星系统 以GPS为例: 1、组成:地面站、卫星系统和飞行器上的接收机。 2、导航原理 从原理看,卫星向地面发射的信息有卫星位置、 时钟、发射信息的时刻等高频信息。 工作频率2200~2300MHz,覆盖全球。
第四章自动驾驶仪及控制规律备课讲稿

• L2
L3/L2
UZON
U ••
微分器
放大器
K1
舵机
K2 T S 1
1/S
d e
操纵杆系
e
Kf
测速电机
直升机
G(S)
• • •
U Z O ( U N U • U • • U g ) L 1 ( g ) L 2 L 3
•
•
•
••
eL(g)L•L••
•
eL ( g)d tL • L ••
K3 B1S
STS1
直升机
Kf
K1
U Z0U 舵回路综合输入信号 操纵杆系假定为1时,通道传递函数为:
e e(s) K1K2/S(TS1)
UZ0U U(S) 1K1K2Kf /S(TS1) 1
TS2
K1K2 SK1K2Kf
T
Kf S2 1
S1
K1K2Kf
K1K2Kf
e
1 Kf
UZ0U
只要满足条件:
(1 K1K 2 K f )
T S 1 K1K 2 K f
T S 1
•
e
1 Kf
UZO N
e
1
1 Kf S
UZO
N
K1K2K
f
只要满足条件: K1K2Kf 1 K1K2Kf T 速度反馈,舵机的时间常数减少了1K1K2Kf 倍
➢综合信号由测量和设置得到
U ZO N L 1( g)
•
eL(g)
L L1 / K f 传 L• L2 / K f 动
L•• L3 / K f 比
一般形式积分式驾驶仪
给定装置 U g 测量元件 U 1
M11下册__自动飞行控制
自动飞行控制M11下第4章4.1自动驾驶仪的工作原理 (3)1. ◆自动驾驶仪的基本原理★P634 (3)2. ◆比例式,积分式自动驾驶仪公式(控制规律)中各项的作用,能产生什么影响?(以俯仰控制为例)★P639-641 (4)3. ◆解释三轴 AP,如果飞机当前在15000 英尺,当设定到新高度20000英尺后,比例式AP 如何进行控制?★★ (4)4. ◆比例式自动驾驶仪的工作原理,给出的是一个图(P639 页),让按照这个图说自动驾驶仪是如何工作的★★ (5)5. ◆自动驾驶仪舵回路原理?★P636 (6)6. ◆ CWS和CMD方式有什么区别,CMD方式的俯仰方式有哪几种?CMD方式的倾斜通道的工作方式?P644 ★ (6)7. ◆垂直导航(V NAV)接通时,自动驾驶如何完成纵向指令计算?P683 (6)8. ◆ MCP板上如何控制飞机俯仰方式,A/P之间关系(高度,高度保持),A/P方式?P664 (7)9. ◆ A/P有什么通道?每个通道有什么参数?P644 ★ (7)10. ◆ A/P衔接后,可以实现的主要功能有哪些? (7)11. ◆如何断开自动驾驶?P665 (7)4.2安定面配平、马赫配平 (8)12. ◆自动配平的原理 P647 ★ (8)13. ◆马赫配平的原理,配平时动什么舵面,当马赫数降低时舵面怎么动?★ (8)14. ◆自动配平作用,失控配平亮什么灯,怎么处理?P652 ★ (8)15. ◆非计划配平灯亮的原因P652 ★ (8)16. ◆马赫配平,安定面配平关系? (9)17. ◆马赫配平的题给了书上 652 页的图,要求解释?p652★★ (9)18. ◆速度配平的原理p650★★ (9)19. ◆死配平,失控配平、反向配平p652★★ (10)4.3偏航阻尼系统 (10)20. ◆荷兰滚产生的原因?P653 ★ (10)21. ◆偏航阻尼系统的原理及作用 P654★ (10)22. ◆偏航阻尼耦合器拆装注意事项?★□ (11)23. ◆偏航阻尼系统的组成及各部件的作用P655 (11)24. ◆偏航阻尼器INOP灯亮的原因P656 (11)25. ◆偏航阻尼的功用,正常转弯有没有影响,为什么?★★ (11)4.4飞行控制计算机(FCC)及系统 (12)26. ◆ FCC主要功能和组成部分P658 (12)27. ◆飞行控制计算机的基本工作原理P660 (12)28. ◆飞行控制计算机的软件组成P662 (12)29. ◆当按下CMD按钮时显示什么?如何断开自动驾驶? P664★ (12)30. ◆ FCC在维护,拆装以及搬运过程中的注意事项,为什么? P659只有一句□ 1331. ◆ FCC都计算哪些指令,这些指令通过MCP板怎样实现俯仰通道方式功能的?★ (13)32. ◆ FCC中值选择电路的功能?在A/P衔接工作情况下选择那部FCC作为主FCC?P670 (13)33. ◆自动着陆系统使用多余度控制,为什么?有一个通道失效以后,怎么工作?P669★ (13)34. ◆模拟式飞行控制系统的主要不足是什么?□ (14)35. ◆数字式飞行控制系统具有哪些主要优点?□ (14)4.5飞行指引仪 (14)36. ◆飞行指引仪的原理、功用。
【飞机系统PPT课件】自动飞行:飞行指引仪_自动驾驶仪

FMA证实了两部自动驾驶仪已全都处于接通状态以及由此达到的系统裕度 (DUAL)。这将指令可能的最低决断高度。你将在“制导方式”模块中更为 详细地了解这一点。
现在我们来学习一下如何断开自动驾驶仪。
MENU
你现在正在作自动进近。当看到跑道时,你决定人工操纵。 按下侧杆上红色的自动驾驶仪脱开按钮以断开自动驾驶仪。该按钮也 称接替按钮。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可 以接通第二部自动驾驶仪。
不对,接通2号自动驾驶仪。
但是,在使用盲降自动进近时,两部自动驾驶仪可同时接通。这将为完成自动着陆、自动 滑跑或低高度复飞提供最佳的系统安全裕度。
因此,一旦获得盲降进近的许可,飞行员就可按下进近按钮以待命航道和下滑道;然后可 以接通第二部自动驾驶仪。
MENU
现在刚刚离地,距地面100英尺。为了减轻飞行员的工作 负担,加强飞机安全性,让我们接通一部自动驾驶仪。
不对,接通1号自动驾驶仪。
现在刚刚离地,距地面100英尺。为了减轻飞行员的工作 负担,加强飞机安全性,让我们接通一部自动驾驶仪。
不对,用AP 1按钮接通1号自动驾驶仪。
FMA证实了1号自动驾驶仪已经接通。 通常当机长是把杆驾驶员时,使用1号自动驾驶仪。当仪副驾驶时把杆驾驶 员时,使用2号自动驾驶仪。这确保在同一时刻,只有一部自动驾驶仪处于工 作状态。自动驾驶仪在飞机离地(5秒钟)后就可使用,从大约离地100英尺开 始一直可用到着陆滑跑。 在大多数情况下,同一时刻只能接通一部自动驾驶仪。
MENU
1号飞行指引仪已接通。1号PFD 上显示十字指令杆;两个PFD上的FMA都显示: FD接通状态为“1FD-”,意味着只有1号飞行指引仪接通, 与1号飞行指引仪相对应的方式。
飞机驾驶技术——自动驾驶仪
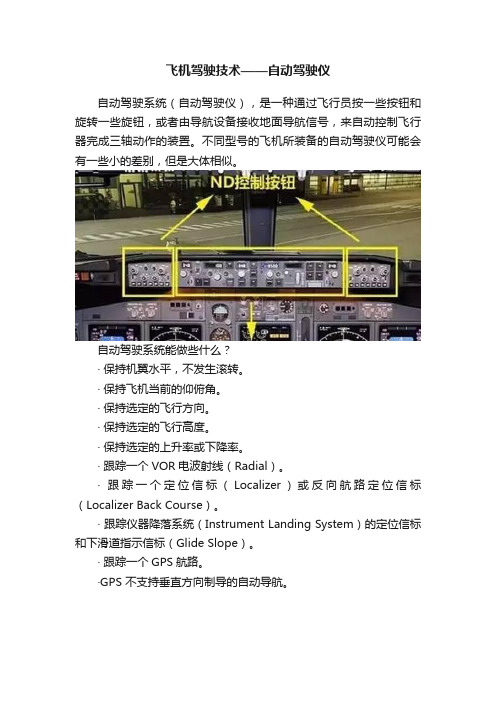
飞机驾驶技术——自动驾驶仪自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。
不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。
自动驾驶系统能做些什么?· 保持机翼水平,不发生滚转。
· 保持飞机当前的仰俯角。
· 保持选定的飞行方向。
· 保持选定的飞行高度。
· 保持选定的上升率或下降率。
· 跟踪一个VOR电波射线(Radial)。
· 跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。
· 跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。
· 跟踪一个GPS航路。
·GPS 不支持垂直方向制导的自动导航。
自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指引仪。
·保持一个选定的飞行速度(空速或地速)。
· 消除有害的偏航。
· 帮助飞行员正确的手动控制飞机。
·飞行管理计算机(Flight Management Computers)· 垂直方向导航(Vertical Navigation)· 横向导航(Lateral Navigation)· 飞行水平改变(Flight Level Change)· 机轮控制(Control Wheel Steering)· 自动降落(Autoland)为什么要使用自动驾驶仪?有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使用自动驾驶仪可以减少飞行员的工作量,特别是在仪器飞行规则(Instrument Flight Rules)的时候。
自动驾驶系统
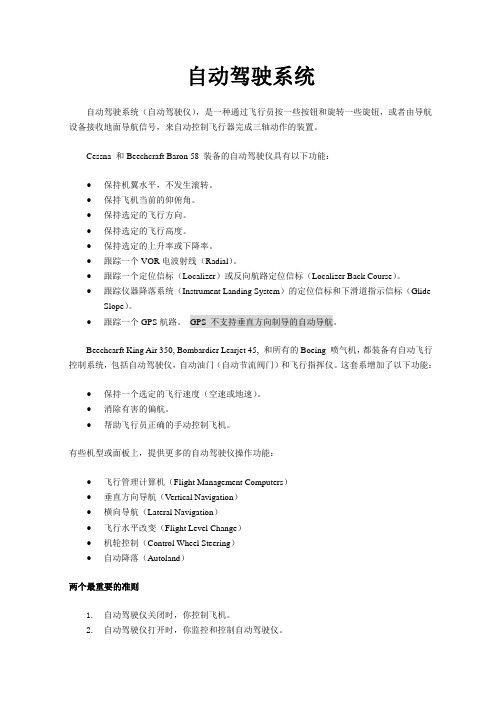
自动驾驶系统自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。
Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能:•保持机翼水平,不发生滚转。
•保持飞机当前的仰俯角。
•保持选定的飞行方向。
•保持选定的飞行高度。
•保持选定的上升率或下降率。
•跟踪一个VOR电波射线(Radial)。
•跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。
•跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。
•跟踪一个GPS航路。
GPS 不支持垂直方向制导的自动导航。
Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。
这套系增加了以下功能:•保持一个选定的飞行速度(空速或地速)。
•消除有害的偏航。
•帮助飞行员正确的手动控制飞机。
有些机型或面板上,提供更多的自动驾驶仪操作功能:•飞行管理计算机(Flight Management Computers)•垂直方向导航(Vertical Navigation)•横向导航(Lateral Navigation)•飞行水平改变(Flight Level Change)•机轮控制(Control Wheel Steering)•自动降落(Autoland)两个最重要的准则1.自动驾驶仪关闭时,你控制飞机。
2.自动驾驶仪打开时,你监控和控制自动驾驶仪。
自动驾驶和飞行有了自动驾驶仪并不意味着你就可以睡大觉了。
使用自动驾驶仪的目的是使你有更多的注意力去完成其他重要的操作。
别茫然的盯着窗外傻看,你还有很多事情要做:•知道自己的位置。
自动驾驶仪

自动驾驶仪一、自动驾驶仪的组成为了弄清自动驾驶仪的组成以及它是如何来代替驾驶员的问题。
我们先来看看驾驶员是如何操纵飞机的。
如果要求飞机作水平直线飞行,飞机必须有一起始的俯仰角(等于平飞时的迎角)来产生一定的升力与飞机的重力平衡.同时升降舵应向上偏转一定角度产生一定的操纵力矩与飞机的稳定力矩平衡.此时陀螺地平仪的指示小飞机应水平线位置,表明飞机作水平直线飞行.若某种干扰使飞机偏离起始姿态(如抬头△角),这时驾驶员从地平仪观察到此变化,于是他的大脑作出决定,前推驾驶杆,使升降舵下偏一个角,产生一低头力矩从而使飞机趋于水平驾驶员从地平仪中看到此变化,于是把驾驶杆逐渐回收到原来的平衡位置,升降舵也回到位置,这时飞机又作水平下线飞行.上述驾驶过程可用图8.20来表示。
由图可知,驾驶员与飞机组成了一个闭环系统,图中虚线框表示驾驶员。
若用自动驾驶仪来代替驾驶员上述驾驶过程的话,那么驾驶仪必须满足如下条件:1.它应能知道飞机偏离预定姿态角的情况,并按偏离方向,使舵面作相应的偏转.2.舵面偏转的大小与飞机偏离的大小应成一定的比例关系.即机头偏离大时,舵偏角也应大。
因此自动驾驶仪也应具有代替驾驶员眼、神经与肌肉、手或脚的一些装置.如起眼睛作用的敏感元件,起神经与肌肉作用的变换放大元件与起手起脚作用的执行元件。
如图8.21所示.由图可知,自动驾驶仪主要由敏感元件、变换放大元件与执行元件三大部分组成.1.敏感元件:有时也称为传感器,它是用来感受或测量飞机的姿态及飞行参数,并输出相应电信号的一些装置。
如测量飞机俯仰、倾斜与航向姿态的垂直陀螺仪放4量飞机绕机体轴转动角速度的速率陀螺仪此外还有大气数据传感器、高度差传感器与加速度计等敏感元件。
2.变换放大元件:从敏感元件输出的电信号一般都是很微弱的,为了使执行元件能够工作,并按一定规律工作,必须将信号加以放大与变换,使得足以推动执行元件,并按一定规律动作。
最常用的变换放大元件有电子放大器、磁放大器与液压放大器等。
民航电子设备——自动驾驶仪

自动驾驶仪 AUTOPILOT
AP
1
内容
一、基本功用 二、组成 三、工作原理 四、驾驶舱中的主要组成部件 五、接通条件和断开方法 六、小结及复习思考题
2
一、基本功用
1、稳定飞机 飞机受到干扰偏离原始状态,自动驾驶仪 能将飞机修正到原状态。
3
一、基本功用
2、操纵飞机 自动驾驶仪根据指令将飞机从原状态改变 到另一状态。
3、一个通道的原理组成
8
9
二、组成
3、一个通道的原理组成 测量装置 计算放大部分 回输部分 控制部分 舵机
10
三、工作原理
1、稳定飞机的原理 (1)稳定飞机的原理
11
12
1)初始状态:假设飞机平飞,升降舵中立,回输 信号为零。
2)受干扰,飞机上仰,测量装置感受到飞机的俯 仰角后,产生测量信号,送到计算机。
5)当回输信号等于指令信号时,舵面停止偏转。
21
6) 飞机在舵面的作用下开始抬头上仰,测量 装置测出飞机的上仰信号,并送给计算机。
7) 这样, 输入计算机中的测量信号、指令信 号、回输信号之差不为零,极性与指令信 号的极性相反。
8) 该信号经放大后,送至舵机使舵面回收, 但总舵面仍是向上偏转。
9) 舵面的回收,使回输信号减小。飞机在舵 面的作用下仍上仰,测量信号增大。
10)如此反复,当测量信号等于指令信号时, 舵面中立,回输信号为零。
22
四、驾驶舱中的主要组成部件
1、AP控制显示板
23
MCP
24
MCP
25
四、驾驶舱中的主要组成部件
1、AP控制显示板
2、AP脱开电门及脱开警告灯
26
27
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e
U
L2 测量元件
K f (S )
反馈元件
U Z 0 n L0 ( g ) L2
L1 L2 e ( g ) L ( g ) L Kf Kf
G ( S)
主控信号:
L ( g )
一、比例式控制规律 舵机输出量(自动倾斜器的偏转角)在自动驾驶仪 控制下与各输入信号之和(综合信号)成正比,此类 控制规律称比例式控制规律。 具有比例式控制规律的自动驾驶仪成为比例式驾驶 仪。
基本控制方案
U Z 0U
K1
K2 d S (T S 1)
自动倾斜器 操纵杆
e
K f (S )
a L L
r K K
c KH H
操纵量与控制信号成比例,即为比例式驾驶仪。
二、积分式控制规律
舵机输出量(自动倾斜器的偏转角速度)在自动倾斜器 作用下与各输入信号对时间的积分之和(综合信号)成正 比,此类控制规律称为积分式控制规律。 具有积分式控制规律的自动驾驶仪称为积分式驾驶仪。
U U f 反向恢复
过程分析
仅有角位置信号的自动驾驶仪
e L ( g )
俯仰角控制静态情况 对于瞬时干扰,驾驶仪稳定俯仰角不存在原理静差, 但对常值干扰则存在静差,修正力矩与常值干扰力矩 平衡时:
my e my
e
my L jc my
jc m y L m y
相当于比例式控制规律中的角速度信号,起阻尼作用, 使自动倾斜器的角速度动作相应提前。 引入角位置信号
L ( g )
消除常值力矩作用下的静差。当常值干扰力矩作用 达到稳定时,需要自动倾斜器保持一定的偏转角来 平衡,这一偏转角不是直接由角位置偏差来提供, 而是通过积分来获得。
舵机
U ZON
放大器
K1
K2 T S 1
1/S
d e
操纵杆系
e
L2
U
L3/L2
微分器
Kf
测速电机 直升机
G(S)
U ZON (U U
U
U g ) L1 ( g ) L2 L3
第四章 自动驾驶仪及控制规律
自动驾驶仪是一种能够稳定和控制直升机运动状态的 自动控制装置。 是一个能保持直升机姿态,辅助驾驶员(有人)控制直 升机航迹的自动调节设备。
直升机的自动驾驶仪一般有四个通道,分别由油门、变 距杆+自动倾斜器和尾桨变距机构控制。 控制通道是4个,可操作的对象有3个,其中自动倾斜 器实现总距、纵向周期变距和横向周期变距。
给定装置
U
g
测量元件
U
U
1
放大器
ZON
舵机
d
e
操纵杆系
e
速度反馈 测量元件
U
n
直升机
1 (u1 u2 ...... un ug ) Kf
三、比例加积分控制规律
U zon
K1
d K2 S (T S 1)
Kf Te S 1
Kf
1 T S 1 e Kf Te S d (S ) T 1 U zon S2 S 1 K1 K 2 K f K1K 2 K f
稳定过程中控制信号U由角位置信号、角速度信号和 角加速度信号三者合成。
U L ( g ) L L
达到稳定时 e L ( g )dt C
时间响应定性分析
角位置信号可使积分式 自动驾驶仪消除稳态误 差――无差控制系统。 工程实际:若角速度陀 螺存在一定的不灵敏度, 此时又无角位置信号作 用,则当直升机姿态角 发生缓慢偏离时,角速 度陀螺无信号输出,则 随时间的积累,会导致 大的误差。换而言之, 若无角位置信号,积分 式自动驾驶仪便无法检 验直升机是否按要求的 姿态飞行。
操纵杆系假定为1时,通道传递函数为:
e e ( s ) K1K 2 / S (T S 1) U Z0U U ( S ) 1 K1K 2 K f / S (T S 1) K1K 2 2 T S S K1K 2 K f 1 Kf T 1 S2 S 1 K1K 2 K f K1K 2 K f
反馈信号不是与自动倾斜器的偏转成正比,而是与其
偏转角速度成正比。测速电机输出与转子转速即自动 倾斜器的偏转速度成正比。 反馈信号与俯仰角偏差信号的差值,取决于自动倾斜 器的偏转角速度。
基本控制方案
L1 Uzon K1
K2 S (T S 1)
操纵杆系
e
Kf S
L1 G(S)
积分式控制律舵回路反馈元件为测速反馈
第四节 侧向角运动控制基本工作原理
侧向角运动包括滚转运动和偏航转动。 滚转角和偏航角的控制分别由滚转通道和航向通道来实现。
一、滚转角自动控制原理
绕直升机纵轴的常值干扰力矩一般不大,故滚转通道往往采用 与俯仰通道相似的控制规律,各信号作用类似。 比例式控制律: L ( ) L
只要满足条件: K1K2 K f 1
K1K2 K f T
速度反馈,舵机的时间常数减少了 1 K1K2 K f 倍
综合信号由测量和设置得到
U ZON L1 ( g )
e L ( g )
e L ( g )dt
e
e
静差 jc与L成反比,要 求静差小时,L须选的大。
俯仰角控制动态过程
俯仰平衡条件
LpwYpw TxY Ty X 0
当干扰作用时,自动驾驶仪测得俯仰角,使自动倾斜器前倾。 Tx加大 TxY加大抑制上仰恢复到原状态。
L不同,过渡过程呈现不同形式
从稳定性看,L不能太大。
1 e U Z0U Kf
只要满足条件:
K1K2 K f 1
K1K2 K f T
自动倾斜器偏转角与综合信号成正比关系,比例系数 是位置反馈系数的倒数。
比例式自动驾驶仪
g
L1
U
U
g
L1
U Z 0U
K1
d K2 S (T S 1)
自动倾斜器 操纵杆
a
g
g
L L
U
g
U
U
Z 0U
K2
K 3 d S (T S 1)
K f (S )
自动倾斜器 操纵杆
a
U
L
测量元件 反馈元件
比例式自动驾驶仪结构图
G(S)
积分式控制律:
a L ( g )dt L L
L
自动倾斜器偏转角速度 与俯仰角速度成正比。 如当直升机受扰动后 上仰,角速度陀螺输 出俯仰角速度,自动 倾斜器以相应的角速 度向前偏转产生恢复 力矩,使直升机向原 状态恢复。当俯仰角 速度信号改变符号, 自动倾斜器也随之改 变转动方向。
引入角加速度信号
L
e L ( g ) L L
L L1 / K f
e L ( g )dt L L
L L2 / K f
L L3 / K f
传 动 比
一般形式积分式驾驶仪
以上结论也适用于滚 转通道,偏航通道。
二、积分式自动驾驶仪控制俯仰角
基本工作过程
e L ( g )dt L L
积分式自动驾驶仪俯仰通道原理框图
过程分析
仅有角速度信号 :
L 在比例式中起阻尼作用,在积分
式作为主控信号与比例式中的角位置 信号同等作用
从静差看,L须选的大。 为了保证原始精度,使系统选取较大的L值时,仍 具有良好的动态品质,引入俯仰角速度反馈。
引入俯仰角速度信号的自动驾驶仪
e L ( g ) L
L
俯仰角速度 信号传动比
自动倾斜器的动作比 只有角信号时提前了。
不仅不会产生严重振 荡,还缩短了恢复初 态的时间。同时,为 增大主控信号L , 尽量减小俯仰角稳态 误差创造了条件,但 不可能彻底消除误差, 成为有差控制系统。
L L1 / K f
自动倾斜器纵向偏转角与俯仰角偏差的积分成正比。
仅有角位置信号的积分式驾驶仪难以稳定工作。为 了改善其稳定性 ,在引入角位置主控信号外,一般 还引入一些辅助信号,如角速度、角加速度信号。
纵向通道积分式驾驶仪
g
给定装置
U
L1
垂直陀螺 U
g
g
L1
速度装置 U
自动测量直升机的飞行状态参数。 将所测结果与给定(初始)状态比较,求出偏差。 将偏差信号转换成能推动自动倾斜器偏转的信号,操纵旋 翼锥体按一定的规律倾斜,使直升机控制到给定状态/恢 复到初始状态。
[例] 驾驶员操纵作等速水平飞行
第二节 基本控制规律
自动驾驶仪的输入信号(综合信号)与舵机输出量(自动倾 斜器的偏转角度或角速度 )之间的函数关系,称为自动驾 驶仪的控制规律。 控制律设计方法很多,对自动驾驶仪控制律设计而言可归纳 为两种基本类型:比例式、积分式。