反馈控制
反馈控制名词解释管理学

反馈控制名词解释管理学反馈控制是管理学中的一个重要概念,指的是管理者通过回顾和评估过去的绩效和结果,以及根据这些信息采取相应的纠正措施并调整未来行动和目标的过程。
反馈控制在管理和组织的决策制定和实施中具有重要的作用,它可以帮助管理者监测和评估组织的业绩,识别问题,并采取纠正行动,最终实现预期的结果。
反馈控制包括三个主要的组成部分:设定目标和标准、收集和比较实际结果和目标、采取纠正行动。
首先,设定目标和标准是反馈控制的起点。
管理者需要通过制定明确的目标和标准来指导组织的行为和绩效。
这些目标和标准应该是具体、可量化和可衡量的,以便能够进行有效的评估和比较。
其次,收集和比较实际结果和目标是反馈控制的核心环节。
管理者需要收集和分析组织的实际绩效和结果,与设定的目标和标准进行比较。
这可以通过定期的绩效评估、数据分析和报告来实现。
通过比较实际结果和目标,管理者可以确定组织的偏差和问题所在,并识别出需要采取的纠正行动。
最后,采取纠正行动是反馈控制的关键一步。
当发现与目标差距较大或发生偏差时,管理者需要采取相应的纠正行动来调整组织的行为和目标。
这可能包括修改目标、调整资源分配、重新分配任务或重新制定策略。
纠正行动应该是及时的、适当的和可行的,以便能够快速纠正问题并实现预期的结果。
反馈控制对于管理和组织来说具有多重重要意义。
首先,它可以帮助管理者监测和评估组织的业绩。
通过收集和比较实际结果和目标,管理者可以了解组织的绩效表现如何,是否达到预期的目标,并识别出任何问题或偏差。
其次,反馈控制可以帮助管理者识别问题和改进机会。
通过对实际结果和目标的比较,管理者可以确定组织的弱点和优势,并找到改进机会。
这可以促使管理者采取必要的纠正行动,以最大程度地提高组织的绩效和效率。
此外,反馈控制可以促进组织的学习和适应。
通过反馈控制,组织可以不断地调整和改善自己的行为和目标,以适应不断变化的环境和市场需求。
这可以使组织更加灵活和适应性强,提高其竞争力和生存能力。
《反馈控制原理》课件
系统复杂性与可维护性
总结词
随着反馈控制系统变得越来越复杂,系统的可维护性和可靠性成为亟待解决的问题。
详细描述
随着系统规模的扩大和组件的增多,反馈控制系统的复杂性也随之增加,这给系统的维护和故障排查 带来了挑战。为了提高系统的可靠性和稳定性,需要加强系统的可维护性和故障预防措施,同时优化 系统架构和组件之间的交互方式。
STEP 02
STEP 01
稳定性的分类
稳定性的定义
如果一个系统受到扰动后 能够回到原来的平衡状态 ,则称该系统是稳定的。
STEP 03
稳定性判据
常用的稳定性判据有劳斯 判据、赫尔维茨判据和奈 奎斯特判据等。
根据系统响应的不同,稳 定性可以分为线性稳定性 和非线性稳定性。
动态响应分析
动态响应的定义
系统在输入信号的作用下,从初始状态变化到最终状 态的过程称为动态响应。
动态响应的分类
根据系统响应的快慢,动态响应可以分为瞬态响应和 稳态响应。
动态响应的性能指标
常用的性能指标有超调量、调节时间和稳态误差等。
误差分析
01
02
03
误差的定义
实际输出与期望输出之间 的差值称为误差。
误差的分类
根据误差的性质,误差可 以分为随机误差和系统误 差。
反馈控制概念
反馈控制原理的核心在于通过不断获取系统的状态信息,与期望状态进行比较,并采取 相应的调整措施,以实现系统的稳定和性能优化。
反馈控制的重要性
提高系统稳定性
通过反馈控制,系统能够 及时发现并纠正偏差,提 高系统的稳定性和可靠性 。
优化系统性能
通过反馈控制,系统能够 不断调整自身状态,以适 应外部环境变化,提高系 统性能和效率。
反馈控制的概念

反馈控制的概念
反馈控制是一种控制系统中常见的概念,用于调整和维持系统的稳定性和性能。
它基于监测系统输出,并将其与期望输出(设定值)进行比较,然后根据比较结果采取控制动作来使实际输出逼近期望输出。
反馈控制系统主要由以下几个要素组成:
1. 传感器(传感器): 用于监测系统的实际输出,并将其转换为可供控制器处理的信号。
2. 控制器(Controller): 通过计算和决策基于传感器提供的反馈信息,确定控制动作,以调整系统状态。
控制器根据实际输出与期望输出之间的偏差(误差)来调节控制信号。
3. 执行器(Actuator): 根据控制器的输出信号,执行指定的控制动作,调整系统的运行状态。
执行器可以是电动机、阀门、伺服驱动器等。
4. 反馈路径(Feedback Path): 反馈路径将系统的实际输出信号转发给控制器进行处理,形成一个控制回路,使控制器能够根据当前状态实时调整控制动作。
反馈控制系统的基本原理是,通过不断地对实际输出和期望输出之间的差异进行监测和调整,使系统能够自动控制自身,并实现所需的控制目标。
反馈控制系统具有自适应性和鲁棒性,可以应对外部扰动和内部变化,并保持相对稳定的性能。
反馈控制在各个领域广泛应用,例如工业自动化、机器人控制、交通管理、电力系统、水处理等等。
它能够有效地解决系统的稳定性、响应速度、抗干扰性等问题,提高系统的性能和可靠性。
反馈控制的基本原理
反馈控制的基本原理1.引言1.1 概述概述反馈控制是现代控制理论中的一个重要概念,它在各个领域都有广泛的应用。
从最简单的家用电器到复杂的工业自动化系统,都离不开反馈控制的支持。
反馈控制通过采集被控对象的输出信息,并将其与期望的输出进行比较,然后作出相应调整,以实现所需的控制目标。
在日常生活中,我们也常常使用反馈控制的原理。
比如,当我们开车时,会根据速度表上的速度和路况的变化,来调整油门和刹车的力度,以保持车辆稳定行驶。
这就是一个简单的反馈控制系统,由车速作为输入,驱动力作为输出。
反馈控制系统由被控对象、传感器、执行器和控制器等几个基本组成部分构成。
被控对象是系统中需要被控制的实际物理过程或设备,例如温度、速度、位置等。
传感器用于检测被控对象的状态或输出信息,并将其转化为电信号。
执行器根据控制信号进行相应的动作,改变被控对象的状态。
控制器是反馈控制系统的核心部分,它根据传感器反馈的信息和期望的输出信息之间的差异,计算出控制信号,使被控对象的输出逼近期望的输出。
反馈控制的基本原理是通过对被控对象的状态进行监测,并根据监测到的信息进行调整,使被控对象的输出接近期望的输出。
在控制过程中,控制器会不断地与被控对象进行交互,并进行参数调整,以实现系统的稳定性和性能要求。
通过不断地反馈和调整,反馈控制系统可以对被控对象的状态进行精确控制,从而实现预定的控制目标。
本文将详细介绍反馈控制的概念、基本组成和基本原理。
同时,还将讨论反馈控制在各个领域的实际应用,以及展望反馈控制的未来发展。
反馈控制是现代控制理论中的基础概念之一,对于提高系统的稳定性、精确性和鲁棒性具有重要意义。
深入了解反馈控制的基本原理,有助于我们更好地理解和应用控制技术,推动科技的发展和进步。
1.2 文章结构本文主要围绕反馈控制的基本原理展开讨论。
文章由引言、正文和结论三个部分构成。
在引言部分,我将对整篇文章进行概述,介绍反馈控制的基本概念以及文章的目的。
名词解释 反馈控制

名词解释反馈控制
嘿,咱今儿就来唠唠“反馈控制”。
你知道吗,反馈控制就像是你走
路的时候,时不时回头看看自己走的路直不直。
比如说,你在玩游戏,你根据游戏的情况做出操作,然后游戏给你一个结果,这结果就是一
种反馈。
就好像你打怪,你打它一下,它掉了多少血,这就是反馈呀!这不就跟你学习一样嘛,你做了一套题,然后看自己错了多少,对了
多少,这也是反馈呀!
反馈控制的作用可大了去了。
咱可以想想,要是没有反馈控制,那
不就像闭着眼睛走路,瞎碰瞎撞嘛!比如说工厂生产东西,如果没有
对生产过程的反馈控制,那可能生产出来一堆废品,这得多大损失呀!再比如你做饭,你不尝尝咸淡,就一直放调料,那最后做出来的能好
吃吗?
在生活中,反馈控制无处不在呢。
你和朋友聊天,朋友的表情和回
应就是对你说话内容的反馈,你就能知道自己说得好不好,要不要调整。
这不就跟开汽车一样嘛,你看着路,根据路况调整速度和方向,
这就是反馈控制在起作用呀!
咱再深入想想,反馈控制就像是我们人生的导航仪。
它能让我们及
时发现问题,然后调整自己的行动。
如果我们一直走在错误的道路上,没有反馈控制告诉我们,那我们不就越走越远了吗?
我觉得反馈控制真的是超级重要的呀!它就像我们的小助手,时刻提醒我们,让我们变得更好。
我们可不能小瞧它,要好好利用它,让我们的生活、学习、工作都更上一层楼!你说是不是呀?。
反馈控制
G& + H&G&
(6-29)
对 G 求导数
dG f = (1+ GH ) − GH = 1
dG
(1+ GH )2
(1+ GH )2
因为 G f = G (1+ GH ) ,所以
dG f = 1 ⋅ dG G f (1+ GH ) G
(6-30)
可见,有负反馈以后,闭环增益的相对变化量比开环增益相对变化量低1 (1+ GH ) ,反馈越深,闭环增益
=
X& d
G&X& d + G&H&X& d
=
1
G& + G&H&
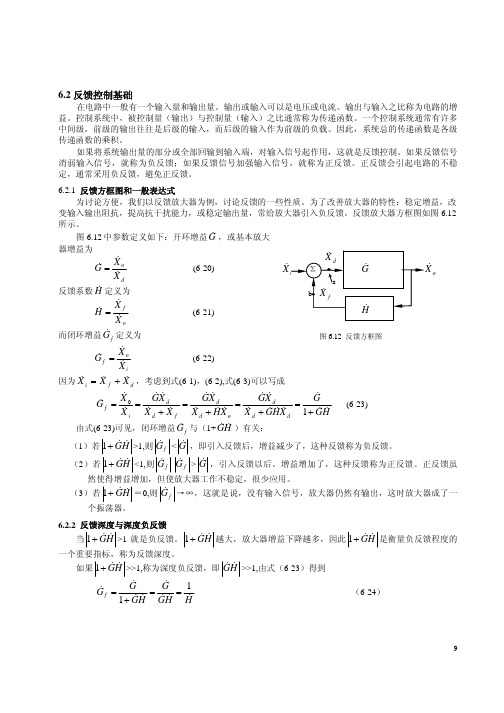
由式(6-23)可见,闭环增益 G& f 与(1+ G&H& )有关:
(6-23)
(1)若 1 + G&H& >1,则 G& f < G& ,即引入反馈后,增益减少了,这种反馈称为负反馈。
(2)若 1+ G&H& <1,则 G& f G& f > G& ,引入反馈以后。增益增加了,这种反馈称为正反馈。正反馈虽
式(6-23)右边分母中的‘1’是 X& d = X& i − X& f ―输入信号与反馈信号的差值信号-放大器的净输入 信号。 G&H& >>1,就是说反馈信号远远大于净输入信号。如果反馈信号是电压,净输入电压为零,称为虚
短;如果反馈信号为电流,则净输入为零。称为虚断。
6.2.3 环路增益
说明前馈控制与反馈控制各自的优缺点

说明前馈控制与反馈控制各自的优缺点前馈控制与反馈控制是控制系统中常用的两种控制方法。
它们各自具有一些优点和缺点,本文将对这两种控制方法进行详细说明。
一、前馈控制的优点:1. 响应速度快:前馈控制是根据预测模型进行控制,可以提前预测系统的变化趋势,因此能够快速响应外部干扰或参考信号的变化。
2. 稳定性好:前馈控制可以有效抑制系统的不稳定因素,提高系统的稳定性。
通过提前补偿干扰或参考信号,可以减小系统的误差,使系统更加稳定。
3. 控制精度高:前馈控制可以根据预测模型精确地计算出控制信号,避免了传统反馈控制中由于传递函数等原因引起的误差积累,从而提高了控制精度。
4. 抗干扰能力强:前馈控制可以提前补偿系统的干扰,减小干扰对系统的影响,从而提高系统的抗干扰能力。
二、前馈控制的缺点:1. 对系统模型的要求高:前馈控制需要准确的系统模型作为基础,如果系统模型存在误差或不准确,将会导致控制效果下降甚至失效。
2. 对干扰的预测能力有限:前馈控制是根据预测模型进行控制,对于无法准确预测的干扰或非线性因素,前馈控制的效果会受到限制。
3. 对系统参数的变化敏感:前馈控制的控制策略是基于系统模型的,一旦系统参数发生变化,需要重新设计前馈补偿器,对于参数变化频繁或不确定的系统,前馈控制的应用会受到限制。
三、反馈控制的优点:1. 对系统模型的要求低:反馈控制是根据系统的实际输出进行控制,不需要准确的系统模型作为基础,因此适用范围更广。
2. 适应性强:反馈控制可以根据系统的实际输出进行调整,能够适应系统参数变化和干扰的影响,具有较好的适应性和鲁棒性。
3. 控制效果稳定:反馈控制能够通过不断调整控制器的参数,使系统的输出逐渐趋近于参考信号,从而实现稳定的控制效果。
4. 易于实现和调试:反馈控制不需要准确的系统模型和预测算法,通常可以通过实验和试错的方式进行参数调试,具有较好的实用性和可操作性。
四、反馈控制的缺点:1. 响应速度较慢:反馈控制依赖于系统的实际输出,需要等待系统的响应,因此相对于前馈控制而言,响应速度较慢。
反馈控制系统原理

反馈控制系统原理反馈控制系统是现代工业控制系统的基础,它的原理可以应用于各种领域,包括机械、电子、化工、航空、航天等。
本文将介绍反馈控制系统的原理,包括反馈控制系统的概念、组成和分类、反馈控制系统的基本原理、反馈控制系统的稳定性和性能分析、反馈控制器的设计方法等。
一、反馈控制系统的概念、组成和分类反馈控制系统是一种通过测量输出信号并将其与所需信号进行比较,从而调节系统输入信号的控制系统。
反馈控制系统由四个基本部分组成:传感器、误差放大器、执行器和反馈控制器。
其中,传感器用于将系统的输出信号转换为电信号,误差放大器用于比较输出信号和所需信号之间的误差,执行器将误差信号转换为系统的输入信号,反馈控制器则用于调节误差信号。
根据系统的反馈路径,反馈控制系统可以分为开环控制系统和闭环控制系统。
开环控制系统是指输入信号不受输出信号的影响,输出信号也不会对输入信号产生影响的控制系统。
闭环控制系统是指系统的输出信号会对输入信号进行反馈调节的控制系统。
闭环控制系统的反馈路径可以分为负反馈和正反馈两种情况。
负反馈是指输出信号与所需信号之间的误差信号通过反馈路径返回到误差放大器进行比较调节,从而减小误差。
正反馈则是指误差信号通过反馈路径返回到系统的输入端口,增加误差,使得系统失去控制。
二、反馈控制系统的基本原理反馈控制系统的基本原理是通过误差信号来调节系统的输入信号,使得系统的输出信号与所需信号尽可能接近。
反馈控制系统的调节过程可以分为三个阶段:传递函数的建立、稳态误差的计算和控制器的设计。
传递函数是反馈控制系统的重要参数,它描述了系统输入信号与输出信号之间的关系。
传递函数可以通过系统的数学模型进行推导,通常采用拉普拉斯变换的方法进行求解。
传递函数的形式为:G(s) = Y(s) / X(s)其中,G(s)表示系统的传递函数,s为复频域变量,Y(s)和X(s)分别表示系统的输出信号和输入信号。
稳态误差是指系统在稳定状态下输出信号与所需信号之间的误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 * * * * 0 a0
Hurwitz稳定判据:全部特征根都位于 左半平面的充分必要条件是Hurwitz行 列式的各阶主子式均大于0。
a3 s 3 a2 s 2 a1s a0 0 以三阶系统为例,特征方程为
其Hurwitz行列式为:
a 2 a0 0 D a3 a1 0 0 a 2 a0 3 2 在上例中 s 2s s 1 0 ,其Hurwitz行列式的各
d (n) y d ( n 1) y dy d ( m )u d ( m1)u du an an 1 +a1 a0 y bm bm1 b1 b0u dt n dt n 1 dt dt m dt m1 dt
Laplace变换
k
F (s) f (t )e st dt
“不,”店主说,“我每天下午5点按照城堡的 鸣炮声来调钟。告诉我,军士,为什么你每天都要停 下来对表呢?” 军士答道:“我是城堡中的炮手!”
在这个故事中,是正反馈还是负反馈占优势?若 这个珠宝店的“精密”时钟每24小时慢2分钟,军士 的表每8小时慢3分钟的话,那么12天后,城堡中鸣炮 的时间误差是多少?
反馈控制的原理
在以上反馈装置中,发电机为被控对象,其端 电压U为被控量,实现控制的设备称为控制器,被 控对象与控制器组成的系统称为控制系统。先从被 控对象获取信息,反过来又把调节被控量的作用馈 送给被控对象,这种控制方法称为反馈控制,按被 控量偏离整定值的方向而向相反方向改变控制量的 反馈称为负反馈。其中信息的传送途径是一个自身 闭合的环,称为闭环。
稳定性的萌芽思想
2000年前 ,汉朝的淮南王刘安 《淮南子•说山训》 : “下轻上重,其覆必易”; 宋朝沈括在 《梦溪笔谈》中把这种观察到的事实付诸 于应用 ,他在《忘怀录》 中指出:“安车车轮不欲高, 高则摇” ; 类似稳定,至少可以追溯1500年前到晋书上所述“行 人安稳,布帆无恙” ; 西方“stable”源出于拉丁文“stabilis” ,表示坚持、 保持的意思; 以上说法与观念表现了对稳定这一概念的最初理解。
G( s) C ( sI A) 1 B D d ( s) det(sI A)
我们可以利用系统的特征根来判断系统的稳定性,以 下例说明,设系统的传递函数为:
s 2 2s 1 G( s) 3 s 2s 2 s 1 它的特征方程: s 3 2s 2 s 1 0 的根是: s1 1.7549, s2,3 0.1226 0.7449i
(3)再选正定的Lyapunov函数
2 V ( x) ( x1 x2 ) 2 2 x12 x2 0 2 2 则 V ( x) 2( x1 x2 ) 0 ,因此系统渐近稳定。
实例分析2:传染病的传播 将被调查人数分为3类,其人数分别记为x1,x2,x3, x1 表示易受感染人数,x2表示已染病人数,x3表示从最初 人群中剔除出去的人数,其原因可能是接受了免疫治疗, 也可能是与传染病源相隔离,还可能是已经死亡。描述 传染病传播过程的反馈系统状态微分方程为:
则G(s)称为该动态系统的传递函数,一个线性动态系 统的传递函数是零初值条件下输出量的Laplace变换 与输入量的Laplace变换之比。d(s)称为特征多项式, d(s)=0称为特征方程,其根称为特征根,即传递函数 的极点。n(s)的零点称为传递函数的零点。 对于用状态空间描述的系统
x Ax Bu y Cx Du
dx1 x1 x2 u1 (t ) dt dx2 x1 x2 u 2 (t ) dt dx3 x1 x2 dt
其中u1,u2分别为新加入易受感染者和新加入染病者的速 率。
写成矩阵形式
x1 d x2 dt x3 0 x 1 0 1 x 0 1 u1 (t ) 0 2 u (t ) x3 0 0 0 2
系统的稳定性
稳定性的定义
稳定性可以这样定义:当一个实际的系统处于 一个平衡的状态时(就相当于小球在木块上放置的 状态一样)如果受到外来作用的影响时(相当于对 小球施加的力),系统经过一个过渡过程仍然能够 回到原来的平衡状态,我们称这个系统就是稳定的, 否则称系统不稳定。一个控制系统要想能够实现所 要求的控制功能就必须是稳定的。
(3) 判定V (x ) 的负定性
2 V ( x) 2 x1 x1 2 x2 x2 2a( x12 x2 ) 2
显然有 x 0时V ( x) 0,因此系统渐近稳定。
选择合适的Lyapunov函数!
例:
x1 x2 x2 x1 x2
an s n an1s n1 ... a1s a0 0
构造Hurwitz行列式D
an 1 an 0 D 0 0 0 0
an 3 an 2 an 1 an 0 ... ...
an 5 ... ... ... an 4 ... ... ... an 3 ... ... ... an 2 ... ... ... ... ... ... ... ... ... ... ... a1 ... ... a2
0
d f (t ) 公式: s k F ( s) s k 1 f (0) s k 2 f ' (0) ... f ( k 1) (0) dt d s dt
y( s) G( s)u( s)
bm s m bm 1s m 1 ... b1s b0 n( s ) G (s) n n 1 a n s an 1s ...a1s a0 d (s)
稳定性科学概念的发展
18世纪下半叶到19世纪末 ,发生了一些具有深远 影响的事件,从中人们可以看到稳定性理论产生的必 然性。 J. Watt 1765改进了T. Newcomen 发明的蒸气机 ,引 发了工业革命; J. L. Lagrange 1780年出版 《分析力学》,科学地讨 论了平衡位置的稳定性; C. Hermite 1856年建立了关于多项式对根交错的理论; J. C. Maxwell 1868年发表的“论调节器” ,讨论了蒸 气机自动调速器与时钟机构的运动稳定性;
两个主要学派
Routh-Hurwitz (1875,1895)通过判断系 统的特征根是否在左半平面判定系统是否稳 定; A.M. Lyapunov 1892发表著名的博士论文 《运动稳定性一般问题》,通过考察系统能 量是否衰减来判定稳定性。
设一个单输入单输出的动态系统可用以下线性微分 方程表示:
2 V ( x) 2 x12 x2 0
(1)试选正定的Lyapunov函数
则V ( x) 2 x1 x2 2 x2是不定的,不能提供稳定性的信息。 (2)另选正定的Lyapunov函数
2 2 V ( x) x12 x2 0 2 则 V ( x) 2 x2 0 ,可知系统至少是稳定的。
阶主子式均大于0,
D1 a2 2, D2
因此系统稳定。
a 2 a0 a3 a1
21 11
1, D3 D 1
Nyquist判据
G(s) k
设G(s)=n(s)/d(s), d(s), n(s)分别是n次,m 次实系数多项式,n>m,d(s)在右半平面有p 个零点,在虚轴上无零点,那么上图所示的 闭环系统稳定当且仅当由-到+时G(j) 绕(-1/k,0)点p圈。当G(s)稳定时,即d(s)的 根均在开左半平面,则上图所示的闭环系统 稳定当且仅当由-到+时不包含(-1/k, 0)在内部。
负反馈:使系统的输出值与目标值的偏差愈来愈小
正反馈:使系统的输出值与目标值的偏差愈来愈大
正反馈并不都是不好的,有的系统需要正反馈 的作用。如原子弹引爆装置中要用到的裂变链式反 应。又如在植物保护中,为了消灭有害的昆虫,大 量繁殖这种害虫的天敌。
实例分析1:军士与店主 一个军士每天早晨9点钟路过珠宝店时,都与橱 窗里的精密时钟对表。一天,这个军士走进店内,向 店主恭维那只精密时钟的准确性。 “它是不是按照阿林顿的时间信号精确对时的?” 军士问。
如何用Lyapunov方法 判断系统的稳定性? 例:
2 x1 x2 ax1 ( x12 x2 ) 2 x2 x1 ax2 ( x12 x2 ), a 0
(1) 确定平衡点,可得 x1 x2 0.
(2) 寻找正定的Lyapunov函数
2 V ( x) x12 x2 0
稳定性科学概念的发展
A.L. Cauchy 在19世纪给出了关于极限描述的-, -N语言; H. Poincare在微分方程定义的积分曲线和天体力 学方面作出了贡献; G. Peano,I. Bendixson和G. Darboux微分方程解 对初值及参数连续依赖性的研究。
上述这些重要事件及相关科学的进展促成了19世 纪末稳定性理论的两个主要学派的形成。
b x (t ) , ( a2 0) a2
静态解
对应的特征方程 通解
2 a1 a2 0
2t
b a2
高阶系统
d n x(t ) d n 1 x(t ) an an 1 a0 x(t ) bu(t ), t 0 n n 1 dt dt
则系统的解可以表示为:
y(t ) Ae1.7549t Be0.1226t sin(0.7449 t ) y* (t ) y * (t ) 是方程的一个特解,由输入u(t)确定。前两项
是相应的其次方程的通解,其中A,B,是待定常数,由 初始条件确定。经充分长时间以后,系统的解 y (t )终 y * (t )的无限小临域,即完全由输入量确定而与 将进入 初始条件无关。这在工程上认为系统进入了静态,对 应的特解称为静态解或稳态解,则系统是稳定的。