毕业设计--高速无人艇设计及运动预报仿真系统
水面高速无人艇的概念设计研究

哈尔滨工程大学硕士学位论文水面高速无人艇的概念设计研究姓名 况小梅申请学位级别 硕士专业 船舶与海洋结构物设计制造指导教师 邹劲哈尔滨 程大学硕士学位论文摘要水面高速无人艇具有高速、隐身、智能等优点 因而能够用于灵活作战。
目前国外已有多种水面高速无人艇应用于军事领域 特别是以美国为代表的西方国家已将其列为重要的发展方向 国内在水面高速无人艇技术方面的研究还处于起步阶段 为了更好地完善海上作战体系 带动相关军工企业的发展 本文进行了水面高速无人艇的概念设计工作。
这里的水面高速无人艇是指具有一定的智能、能够高速航行于水面、具有较大的航程和良好的隐身性能、而且能根据任务需求搭载各种不同模块、可以自主完成一系列任务的滑行艇。
本文进行的主要工作有 一、从任务需求的快速、隐身、优良的大倾角稳性和抗沉性等特点出发 结合各种相关设计资料 设计出三种合适的水面高速无人艇艇型设计方案 二、对三种方案进行快速性、大倾角稳性、抗沉性、隐身性分析 再结合模型试验优化成最优方案进行后续设计 三、对水面高速无人艇进行主机、推进器选型和主要结构的设计 四、运用 公司的有限元分析软件 结合 对水面高速无人艇使用复合材料制造的船体机舱进行强度校核。
关键词 水面高速无人艇 概念设计 强度校核哈尔滨工程大学硕士学位论文 埘 曲哈尔滨工程大学学位论文原创性声明本人郑重声明 本论文的所有工作 是在导师的指导下 由作者本人独立完成的。
有关观点、方法、数据和文献的引用已在文中指出 并与参考文献相对应。
除文中已注明引用的内容外 本论文不包含任何其他个人或集体已经公开发表的作品成果。
对本文的研究做出重要贡献的个人和集体 均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
作者 签字 日期 甜 年≥月 『日堕堡婆二要奎兰堕主堂堡堡奎第 章绪论 引言在过去 年中 无人驾驶运载工具开始真正呈现出复兴的势头。
正在从简单的无人驾驶靶机向可提供兵力倍增作战能力的系统方面过渡。
一种内河海事无人艇路径规划算法设计与仿真

一种内河海事无人艇路径规划算法设计与仿真吴博;文元桥;肖长诗【摘要】In order to solve the problem of path-planning for inland maritime unmanned surface vessel, a traversal algorithm based on inland electronic chart is presented. The grids method in the algorithm is selected to choose navigation area based on the layered inland electronic chart, using global path planning and local path planning method to find approximate navigable path. The Voronoi diagram is selected to establish the navigation path set for dynamic objects or obstacles which can be regarded as particles. Bezier curves and quadratic programming mathematical methods are used to optimize the path of the navigable which is the public area of navigation area(or minor hinders navigation area)and the navigation path set. Matlab based simula-tions demonstrate that when the obstacle position coordinates or destination location coordinates can generate approximate navi-gable path. Generating different approximate navigable path can be optimized for optimal safety navigable path, so the construct-ing environment model and the use of the path planning algorithm are available and effective.%为了解决内河海事无人艇路径规划问题,提出了一种基于电子江图的路径遍历算法。
高速游艇驾驶仿真系统研究与设计

高速游艇驾驶仿真系统研究与设计姜文刚;尚婕;邓志良;汪电明;李绍鹏【摘要】对高速游艇的舵机、主机、运动和姿态进行了建模和计算机仿真.结合高速游艇船体等实物,构造了半实物的高速游艇驾驶实时仿真系统.给出了系统的设计方案,完成了整个系统的硬件和软件设计、调试及半实物实时仿真.实际应用表明,本文研制的高速游艇驾驶仿真系统可以作为船舶驾驶和操纵的模拟演示装置,也可作为训练船舶驾驶员的仿真器.【期刊名称】《江苏科技大学学报(自然科学版)》【年(卷),期】2005(019)006【总页数】4页(P12-15)【关键词】高速游艇;仿真;驾驶【作者】姜文刚;尚婕;邓志良;汪电明;李绍鹏【作者单位】江苏科技大学电子信息学院,江苏,镇江,212003;南京理工大学自动化系,江苏,南京,210094;江苏科技大学电子信息学院,江苏,镇江,212003;江苏科技大学电子信息学院,江苏,镇江,212003;江苏科技大学电子信息学院,江苏,镇江,212003;江苏科技大学电子信息学院,江苏,镇江,212003【正文语种】中文【中图分类】U661.10 引言现有的船舶驾驶仿真系统都是针对大的船舶而研制的[1-2],与一般的船舶相比,游艇具有速度快、运动姿态多等特点,对其运动仿真比一般船舶要复杂的多。
目前船舶驾驶仿真平台有4种方式实现:硬件模拟[3]、纯软件模拟[4]、虚拟现实[1,5]和半实物。
硬件模拟灵活性差,纯软件模拟缺乏真实感,虚拟现实尚存有大量未解决的难题以及理论和技术上的盲区且价格高昂[6]。
半实物仿真具有很强的真实感,能实时仿真船舶的驾驶过程。
本文研制的高速游艇驾驶仿真系统作为江苏省科学宫的展品,为了实现系统的科学性和真实性,研究了真实的船舶舵机、船舶主机以及船舶运动的特性与规律,建立了各自的数学模型。
采用事先计算、实时插补、惯性模拟的方法,对模型进行实时仿真,解决了实时性问题。
系统以南京长江大桥、三峡等地段航道为背景构成虚拟三维外景,充分考虑了船舶性能、航道条件、驾驶人员和自然环境等因素,利用先进的自动控制、计算机、图象处理、虚拟现实、数字仿真、船舶水动力学等技术,实时模拟船舶操纵,逼真驾驶场景。
水面高速无人艇的概念设计研究
哈尔滨工程大学硕士学位论文水面高速无人艇的概念设计研究姓名 况小梅申请学位级别 硕士专业 船舶与海洋结构物设计制造指导教师 邹劲哈尔滨 程大学硕士学位论文摘要水面高速无人艇具有高速、隐身、智能等优点 因而能够用于灵活作战。
目前国外已有多种水面高速无人艇应用于军事领域 特别是以美国为代表的西方国家已将其列为重要的发展方向 国内在水面高速无人艇技术方面的研究还处于起步阶段 为了更好地完善海上作战体系 带动相关军工企业的发展 本文进行了水面高速无人艇的概念设计工作。
这里的水面高速无人艇是指具有一定的智能、能够高速航行于水面、具有较大的航程和良好的隐身性能、而且能根据任务需求搭载各种不同模块、可以自主完成一系列任务的滑行艇。
本文进行的主要工作有 一、从任务需求的快速、隐身、优良的大倾角稳性和抗沉性等特点出发 结合各种相关设计资料 设计出三种合适的水面高速无人艇艇型设计方案 二、对三种方案进行快速性、大倾角稳性、抗沉性、隐身性分析 再结合模型试验优化成最优方案进行后续设计 三、对水面高速无人艇进行主机、推进器选型和主要结构的设计 四、运用 公司的有限元分析软件 结合 对水面高速无人艇使用复合材料制造的船体机舱进行强度校核。
关键词 水面高速无人艇 概念设计 强度校核哈尔滨工程大学硕士学位论文 埘 曲哈尔滨工程大学学位论文原创性声明本人郑重声明 本论文的所有工作 是在导师的指导下 由作者本人独立完成的。
有关观点、方法、数据和文献的引用已在文中指出 并与参考文献相对应。
除文中已注明引用的内容外 本论文不包含任何其他个人或集体已经公开发表的作品成果。
对本文的研究做出重要贡献的个人和集体 均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
作者 签字 日期 甜 年≥月 『日堕堡婆二要奎兰堕主堂堡堡奎第 章绪论 引言在过去 年中 无人驾驶运载工具开始真正呈现出复兴的势头。
正在从简单的无人驾驶靶机向可提供兵力倍增作战能力的系统方面过渡。
基于新型直翼舵桨的无人艇控制设计

基于新型直翼舵桨的无人艇控制设计◎ 黄鑫 杭州现代船舶设计研究有限公司摘 要:直翼舵桨无人艇控制系统是一种由电子、通信、自动控制等技术组成的集成控制系统。
该系统包括无线遥控设备、传感器、控制算法和执行器等部分。
本文将突破传统的无人艇螺旋桨推进方式,以新型的直翼舵桨作为无人艇控制船体方向、速度和前进。
传感器则负责获取所在环境的信息,例如水深、水流、风向、水温等,并将其传输给控制系统进行数据处理和决策。
控制算法通过对传感器信息的分析和加工,实现对直翼舵桨的闭环控制,并驱动执行器完成各项任务。
并通过实船验证方式,对各功能模块测试和验证,最后,分析展望了直翼舵桨无人艇发展前景和应用领域。
关键词:无人艇;直翼舵桨;自主航行1.引言随着科技的不断进步,无人驾驶逐渐成为船舶发展未来趋势,其应用前景如海上救援、海洋监测、民用运输、军用装备等领域。
舵桨装置及操控系统作为无人艇的核心部分,其设计和性能对船舶安全性和稳定性起着至关重要的作用,而传统的舵桨装置及操控存在着一些缺陷,如水动力不稳定、结构复杂、操控滞后等。
本文针对基于新型直翼舵桨及操控进行分析及应用,有望为无人艇设计领域开拓一片新天地。
2.直翼舵桨装置2.1组成与工作原理直翼舵桨[1]组成:桨叶1,主轴2,舵3,筒体4,行星轮/阳轮5,如图1所示。
直翼舵桨工作原理:动力系统(可为柴油机或者电动机)输入主轴2,通过行星轮/阳轮5的行星轮自转和太阳轮公转,可实现船舶前进,通过舵3可实现船舶360°全回转。
2.2水动力CFD建模及试验实体建模,如图2所示,直翼舵桨的流体力学计算[2-3]需要考虑的因素非常多,涉及到三维空间中的流场变化、边界层等问题。
由于并且需要进行大量的数值计算才能得到准确的结果。
以下是一些的公式和参数:1)直翼舵桨的升力系数:CL = L / (0.5×ρ×V2×S)其中L是直翼舵桨产生的升力,ρ图1 直翼舵桨机构图2 船体模型图3 水动力仿真建模和水下测试珠江水运 2023 1221比例增益系数K p =0.4,积分系数KI=50,微分系数KD=6.2,设定的期望转角位置为π/6。
一种无人船能效智能优化仿真系统及方法

一种无人船能效智能优化仿真系统及方法一、引言无人船是指无需人工驾驶的船只,具有自主导航和任务执行能力。
随着智能技术的快速发展,无人船在海洋勘探、海上救援、环境监测等领域得到了广泛应用。
为了提高无人船的能效,降低能源消耗,本文提出了一种无人船能效智能优化仿真系统及方法。
二、无人船能效智能优化仿真系统1. 系统框架无人船能效智能优化仿真系统主要包括三个部分:无人船模型、能效评估模块和优化算法模块。
(1)无人船模型:该模块是系统的核心,它能够模拟无人船在不同环境条件下的运动和能源消耗情况。
通过收集传感器数据和环境参数,无人船模型可以实时更新船只的状态和能耗信息。
(2)能效评估模块:该模块用于评估无人船的能效表现。
它通过对无人船模型的输出数据进行分析,计算能源利用效率、航行速度、航程等指标,以评估无人船的能效水平。
(3)优化算法模块:该模块用于优化无人船的能效。
它根据能效评估模块的结果,采用智能优化算法,例如遗传算法、粒子群算法等,对无人船的航行路线、速度控制、动力系统等进行优化,以提高能源利用效率和航行性能。
2. 系统流程无人船能效智能优化仿真系统的流程如下:(1)数据采集:通过传感器采集无人船的位置、速度、姿态、环境参数等数据,并实时传输给无人船模型。
(2)无人船模型更新:根据接收到的数据,无人船模型更新船只的状态和能耗信息,并输出给能效评估模块。
(3)能效评估:能效评估模块对无人船的能效进行评估,计算能源利用效率、航行速度、航程等指标。
(4)优化算法运行:根据能效评估模块的结果,优化算法模块运行相应的智能优化算法,对无人船的航行路线、速度控制、动力系统等进行优化。
(5)优化结果应用:优化算法模块输出优化结果,更新无人船的航行策略和控制指令。
三、方法实现1. 无人船模型设计无人船模型需要考虑船只的动力系统、航行姿态控制、能源消耗等因素。
根据船只的特性和任务需求,设计合理的无人船模型,可以通过建立动力学模型、气动学模型和能源模型等来实现。
水下无人航行器高速航行下的运动特性及仿真控制研究

水下无人航行器高速航行下的运动特性及仿真控制研究
王磊;任梦晨;张占阳;李德军;张伟;杨青松
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)6
【摘要】水下无人航行器具有水下活动范围大、机动性好优点,主要用于大范围地形地貌勘探,水下高速长航程航行时,水下航行器运动特性和姿态控制是研究重点。
本文建立水下航行器垂直面航行运动模型,分析高速航行下的运动特性。
为保证高速航行高效稳定,提出PID方法控制纵倾和滑模方法控制深度的组合控制策略。
通过仿真试验,开展高速航行运动仿真研究。
研究结果表明,在高速航行下,水下航行器会产生一定纵倾,且随着航速增加,纵倾影响会越大,高速状态放大了水下航行器外形上下轻微不对称的特性,诱导产生的垂向水动力及力矩增大,进而引起纵倾;在高速航行条件下,水下航行器能稳定保持定深度长距离航行,控制策略具有很好的适用性。
【总页数】4页(P86-89)
【作者】王磊;任梦晨;张占阳;李德军;张伟;杨青松
【作者单位】中国船舶科学研究中心;深海载人装备国家重点实验室;深海技术科学太湖实验室;上海交通大学
【正文语种】中文
【中图分类】U674.941
【相关文献】
1.无人水下航行器控制系统CAN总线通信设计与仿真研究
2.基于鲁棒滑模控制的水下航行器运动控制仿真研究
3.无人水下航行器分布式运动控制系统设计与仿真验证
4.四旋翼碟形自主水下航行器运动方程建立与流体特性仿真研究
5.Unity3D 无人航行器水下自主航行三维仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
某小型低空高速无人机控制律设计与仿真
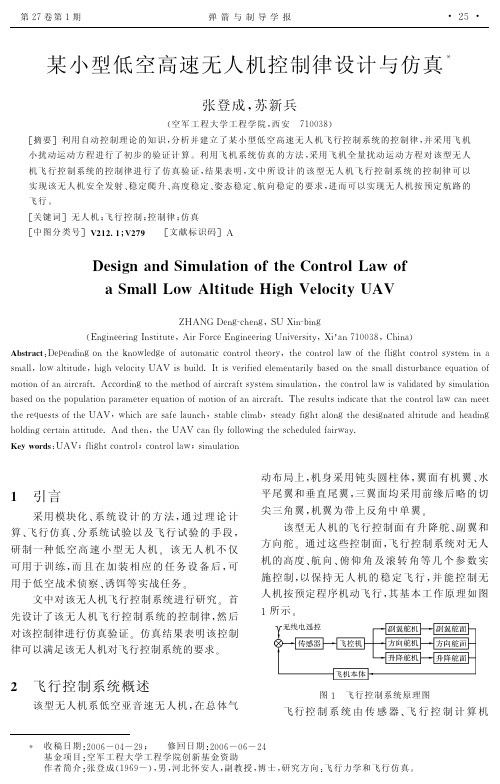
上述控制律可以采用飞机纵向小扰动运动 方程!详细内容请 参 阅 相 应 的 参 考 资 料"进 行 初 步 的 计 算 验 证 %计 算 结 果 如 图!和 图S所 示 !初 始
高度增量为 U#%C%即低 于预定 高度 #%C"#图 ! 表示的是在扰 动 结 束 后 飞 机 高 度 增 量 "W 和 速 度增量 "+ 的变化规律(图 S 表 示 的 是 在 扰 动 结 束后飞机的迎角增量 "%$俯仰角增量 "7 和航迹 倾角增量 "/的变化过程#
初始高度增量为表示的是在扰动结束后飞机的迎角增量和航迹倾角增量高度增量和速度增量迎角增量俯仰角增量和航迹倾角增量由上述计算结果可以看出该无人机的纵向控制律可以实现无人机的纵向高度速度和姿态稳定横航向控制律设计横航向的飞行控制采用副翼和方向舵联合控制的方式由副翼和方向舵联合进行横航向控制时副翼控制律设计基本思路为侧向距离偏差航向角偏差和滚转角为主反馈信号滚转角速度作为阻尼信号副翼偏角为控制输出以达到保持预定航向和姿态的目的控制律的计算公式为分别为飞机的实际航向角和指令航向角为飞机的实际滚转角由副翼和方向舵联合进行横航向控制时方向舵控制律设计基本思路为侧向距离偏差和航向角偏差为反馈信号方向舵偏角为控制输出用以协调控制航向控制律的计算公式为分别为飞机的实际航向角和指令航向角为飞机侧向距离偏差航向角偏差到副翼的传动比上述控制律可以采用飞机横航向小扰动运动方程进行初步的计算验证计算结果如图表示的是在扰动结束后飞机高度增量表示的是在扰动结束后飞机迎角增量表示的是在扰动结束后飞机侧向偏移距离表示的是在扰动结束后飞机侧滑角高度增量和速度增量迎角增量俯仰角增量和航迹倾角增量侧滑角偏航角和滚转角由上述计算结果可以看出该无人机的横航向控制律可以实现无人机收到横航向扰动后的纵向高度稳定和姿态稳定也可以实现横航向的航向稳定和姿态稳定既可以消除侧向偏移和保持预定航向并且速度也可以实现稳定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以色列于2003年研制的多用途无人艇——“保护者”号 以色列某公司开发的Seastar(海星)高速无人水面艇
江苏科技大学本科毕业设计
二、国内高速无人艇的发展概况
❖ 中国的无人艇研究尚在起步阶段。目前国内的无人 艇技术多处于概念设计阶段,很多关键领域都是空 白,与欧美等发达国家相比存在很大差距。
❖ 实艇建造方面几乎是空白。1972年中华造船厂建造 了一艘无人遥控扫雷艇,但没有后续报道,从时间 上来说,其技术已经落伍。2002年我国北方某通信 修理厂将一艘退役导弹快艇改装为无人遥控靶船, 通过远距离摇控指挥,实现对船航速、航向、灯光 信号识别等要素的战术控制。
❖ 根据建立的三自由度运动数学模型,用Visual Basic(VB)程序语言编写仿真系统,进行三自 由度运动预报模拟。
江苏科技大学本科毕业设计
高速无人艇的研究意义(一) ❖高速水面无人艇能弥补在体系作战中的许多不足,形成 局部战术优势,达到影响局部战争的目的,是未来海战中 不可或缺的角色,为顺应武器智能化的历史潮流,开展高 速无人艇的技术研究己迫在眉睫。
美国海军”斯巴达侦察兵“号无人艇
江苏科技大学本科毕业设计
2、以色列
❖ “保护者”由以色列拉 斐尔武器发展局开发, 以9米长的刚性充气艇 为基础,喷水推进,航 速超过30节,最大作战 有效载荷1000千克。
❖以色列其他公司开发 产品,如图所示: Seastar(海星)高速 无人水面艇正在高速 航行。
江苏科技大学本科毕业设计
前言:
21世纪是海洋的世纪,海洋将成为世界各国竞 争的焦点。进入21世纪以来,海洋科学日益发展, 海洋与人类联系也越来越密切。船舶(广义船舶包 括各种浮式平台),是人类探索、开发和利用海洋 的重要手段。海洋资源的竞争,海洋主权的完整, 不可以没有先进的船舶技术,更不可以没有强大的 海军。由于世界海域的广阔,在船舶领域,高速船 舶的地位日益提高;而高速无人艇更是各类船舶中 新概念、新思想最丰富、最具挑战性的领域,具有 广阔的前景。
的排水量 0.7t
用Maxsurf所建的双体模型
江苏科技大学本科毕业设计
用Maxsurf对艇静止在水面时的模型基本计算
❖ 排水量
0.70t
❖ 水线之下容量 6.85m3
❖ 吃水
0.30m
❖ 设计水线长 5.03m
❖ 水下湿表面积 2.92m2
❖ 棱形系数
0.78
❖ 方形系数
0.65
❖ 中横剖面系数 0.834
❖ 水线面系数 0.831
❖ 浮心高度
0.183m
❖ 每厘米吃水吨数 0.030t/cm
❖ 每厘米纵倾力矩 0.011t.m
模型立体视图
江苏科技大学本科毕业设计
江苏科技大学本科毕业设计
❖ 中国航天科工集团公 司沈阳新光公司研制 成功的中国第一艘无 人驾驶海上探测船 “天象一号”为北京 奥运会的青岛奥帆比 赛提供气象保障服务, 这也是世界上首次应 用无人船进行气象探 测。
中国第一艘无人驾驶海上探测船——天象一号
江苏科技大学本科毕业设计
❖ 在阻力计算系列图谱研究方面,中国船舶科学研 究中心(CSSRC)以各种滑行艇艇形阻力试验结果 整理成的一套估算阻力图谱。这是一种艇底舯后 扭曲的型线,目前这种艇型在我国被大量采用。
❖ 此外,哈尔滨工程大学水下智能机器人实验室在 水下机器人技术研究方面也积累了较丰富的经验, 目前正在开展水面无人艇的概念设计和艇体初步 设计等工作。
❖ 另外国内一些船舶院校,如上海交通大学、江苏 科技大学等,在某些方面也做过一定的研究。
江苏科技大学本科毕业设计
第二章 船体建模
单体模型的主尺度
❖ 滑行艇长L=6.0m ❖ 滑行型宽B=2.09m ❖ 滑行型深D=0.82m ❖ 设计吃水t=0.47m
1、美国
“斯巴达侦察兵” 是 一种具备半自主能力、可 从水面舰船或岸上发射的 无人水面艇,可执行水雷 战,情报、监视与侦察, 护防,及反潜战等任务。
在2006年弗吉尼亚ultiagency展会上的TUSSV-HTF无人艇
上图为美国海军水面 作战中心卡德罗克分部研 发的无人驾驶海面舰艇, 其正在美国东海岸之外的 海面上行动。
江苏科技大学本科毕业设计
第一章 研究背景
一、国外高速无人艇的发展概况
水面高速无人艇的研发较水下无人潜器、无人 飞机等的研发起步晚,但其发展十分迅速,目前己 有多种无人水面艇应用于军事上;在港口作业中, 也有应用无人艇的使用;特别是以美、欧为代表的 国家己将其列为重要的发展方向。
江苏科技大学本科毕业设计
高速无人艇的研究意义(二) ❖初步建立具有侦察/探测等功能,并可更换任务模块、具 有自主知识产权的智能水面高速无人艇系统,将填补我国 在该领域的空白,并带动其他产业的发展面无人艇是保卫国家主权的需要,也 是解决维护国家统一的台海问题、周边地区的冲突问题和 霸权国家潜在的威胁问题等的需要。
❖ 静止在水中的满载排
水水量 2.50t
用Maxsurf所建的单体模型
江苏科技大学本科毕业设计
用Maxsurf对艇静止在水面时的模型基本计算
❖ 排水量
2.50t
❖ 水线之下容量 2.46m3
❖ 吃水
0.47m
❖ 设计水线长 5.77m
❖ 水下湿表面积 7.60m2
❖ 棱形系数
0.654
❖ 方形系数
江苏科技大学本科毕业设计
论文主要内容
❖ 针对目前国内外的高速无人艇研究现状展开了调 查研究,并进行简单的介绍。
❖ 确定无人艇的主尺度及主要参数,利用Maxsurf软 件进行单体、双体船体模型方案初步设计。
❖ 对无人艇进行水动力分析,并做出初步的性能评 估。
❖ 建立滑行艇前进、升沉及纵摇三自由度运动数学 模型,开展三自由度运动预报。
0.501
❖ 中横剖面系数 0.791
❖ 水线面系数 0.726
❖ 浮心高度
0.284m
❖ 每厘米吃水吨数 0.078 t/cm
❖ 每厘米纵倾力矩 0.027 t·m
模型立体视图
江苏科技大学本科毕业设计
双体高速艇的主尺度
❖总长 L=5.20m ❖片体总长 L=5.20m ❖型宽 B=1.80m ❖片体型宽 B=0.45m ❖型深 D=0.855m ❖设计吃水 t=0.30m ❖ 静止在水中