越野车辆平顺性评价方法研究
谈汽车行驶平顺性的评价分析
抛 下 , 记 录 车身 和 车 轮质 量 的 衰减 振 动 。 可 以得 到 称身质量振动周 和车轮质量振动周期 。 3 . 3实 际路面随机输入行驶试验 。此项试验是评定汽车平顺性 【 b 1 是 指 常 年 累 月 每 天 重 复 在 的最 主要试验 。按照 G B 4 9 7 0 — 8 5 《 汽车平顺性随机输入行驶试验方 I S 02 6 3 1^ 体对振动反应的疲劳 振动环 境 中持续 的时 间 , 法》 进行 。 各种车轮 因工作条件不 同 , 试验要求的路况 、 车速 、 传感器 工效刚 氐 界限 对于偶尔乘车的人 ,加速 安装位置等也有所不同。 度 的容许值可 以高很多。人最敏感 的频率范 围, 对于垂直振动是 4 ~ 3 . 4 脉 冲输 入 试 验 。汽 车 行 驶 时偶 尔会 遇 到 凸块 或 凹 坑 , 其 冲 8 H z ,对 于水平振动是 2 H z 以下。而且在 2 . 8 H z以下 同样的暴露时 击会影 响汽车平顺性 , 严重时会损害人体健康 , 破坏运载的货物 。 此 间, 水平振动容许 的加速度值低于垂直振动 ; 在2 . 8 Hz 以下则相反。 项试 验按 G B 5 9 0 2 — 8 6 《 汽 车 平顺 性单 脉 冲输 入 行 驶 试 验 方 法 》 进行 , 1 . 2 国家标准对行驶平顺性 的评价方法。 G B 4 9 7 0 — 1 9 8 5 ( ( 汽车平 汽 车 以一 定 车速 驶 过 规 定 尺 寸 的 三 角 形 凸块 得 到 脉 冲 输 入 。 评 价 指 顺性 名词术语及定 义》 规定 , 用平顺性 随机输人行驶试验 测定汽车 标用坐垫上和地板上加速度最大值 或加权速度最大值 。 在随机不平 的路面上行驶时振动 对乘员及货物 的影 响来 评价汽 车 参 考 文 献 的 平 顺性 。 因 为 随机 输 入 是 汽 车 行 驶 中遇 到 的最 基 本 情 况 , 所 以 这 【 1 】 徐 璋. 汽 车 平顺 性 评 价 方 法 的研 究I J ] . 西 南 交通 大 学 , 2 0 1 2 . 种 试 验 是 评定 汽 车平 顺 性 最 主 要 的试 验 。该 标 准 规 定 , 以“ 疲劳一 工 [ 2 1 王 岩松 , 石晶 , 耿艾莉 , 等. 汽 车 平 顺 性 的 模 糊 评 价 方 法 的研 究 及 效降低界 限” T 和 “ 降低舒适界限” T 。为人体承受振动能量 的主要 应 用『 J ] . 辽 宁 工 学 院 学报 , 2 0 0 3 ( 5 ) . 评价指标 ;以 T 而和 T 。与车速 的关 系曲线——车速特性来 评价汽 【 3 ] 郝 少锋 , 吴义 民, 刘 宝锋 , 等. 车辆 平顺性改善试验 研 究…. 汽 车实 车 的平顺性。其 中轿车和客车用 “ 舒适 降低界 限” 车速特性 T r —一 v 用技 术 。 2 O L O ( 2 ) . 来评 价 , 货 车用“ 疲劳——工效 降低 界限” 车速 特性 T 广 _ 一v 来 评 价, 并对试验条件及车速范 围作 了相应 的规定 。“ 车速特性 ” 可 以在
高机动性车辆越野平顺性分析方法研究
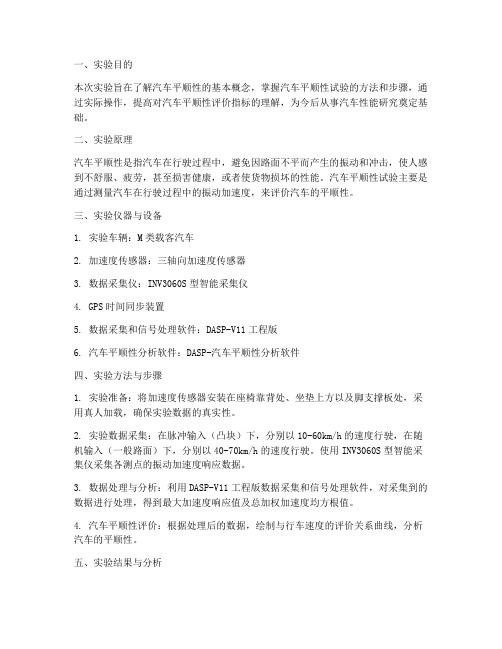
高机动性车辆越野平顺性分析方法研究2008年(第3O卷)第9期汽车工程AutomotiveEngineering2008(V o1.30)No.92oo8166高机动性车辆越野平顺性分析方法研究陈欣,祁涛,李栓成,蒋关华,李华(军事交通学院汽车工程系,天津300161)[摘要]针对具有独立悬架的8×8重型车辆,建立了多轴车辆的平顺性模型,提出了车辆通过随机路面和半圆障碍时动力学响应的分析和评价方法.探讨了越野平顺性与机动性的关系,并结合某具体车型研究了车辆结构参数对整车越野平顺性及机动性的影响.关键词:平顺性;机动性;平均吸收功率;峰值加速度AStudyontheAnalysisMethodoftheOff-road RideComfortofHighMobilityVehicleChen~in,QiTao,LiShuaneheng,JiangMeihua&LiHua DepartmentofAutomotiveEngineering,TheAcademyofMilitaryTransportation,啦300161[Abstract]Amodelfortheridecomfortofan8×8heavyvehiclewithall—wheelindependentsuspensionsis setUpandthemethodsofanalyzingandevaluatingthedynamicresponsesofvehiclecrossingt herandomroadandahalf-roundbumpareproposed.Therelationshipbetweentheoff-roadridecomfortandmobili tyofavehicleisinves—tigated.Andtheeffectsofstructuralparametersonoff-roadridecomfortandmobilityarestudi edonaspecificvehi—cle.Keywords:ridecomfort;mobility;averageabsorbedpower;peakacceleration 日IJ百以越野行驶为主的高机动性车辆平顺性与普通车辆平顺性问题的侧重点不同,前者更加强调提高越野行驶安全速度.一般来说,越野平顺性好的车辆,其机动性也越高.车辆在通过各种越野路面时,随着车速的提高,由不平道路引起的车身振动必然增加,在这种情况下,乘员会感到不适与疲劳,驾驶员将不得不降低车速,这说明车身振动加速度制约着越野车速的提高.为了对车辆的越野平顺性进行更全面的评价,可在两类行驶工况下对车辆进行考核,一是在随机不平地面上行驶,二是通过有突起的地面.前者的考核指标除了加速度均方根值u外,还可以采用吸收功率法;而通过突起的情况则采用峰值加速度进行评价.评价方法可以是先设定这两个指标的允许值,然后分析车辆在不同地面激励的情况下,指标同车速的变化关系,最终根据车辆不超过允许值所能达到的最高车速来判断车辆平顺性是否达标;也可以限定工况和车速,看是否指标超过允许值.工况设定时,对随机路面需要增加地面的种类,至少要包含较恶劣的道路,按照我国道路的分类,至少要包含D级以下的道路.有突起的地面主要是通过设置不同高度的半圆或三角形障碍来考核.通常对于汽车平顺性的研究多为两轴车辆,且一般都采用质量分配系数占=1_的特殊情况下的双轴汽车等效系统模型.对于多轴车辆,由于各轴输入对车身影响的相互耦合,情况要更加复杂,但是通过适当的方法(如引入各轴悬架的弹性变形为线性关系)可以将复杂的方程组进行简化.文中重点讨论多轴车辆平顺性模型的建立和求解问题,以8×8重型车辆为例建立了考虑垂直加速度和俯仰角加速度的分析模型J.原稿收到日期为2008年3月5日,修改稿收到日期为2008年4月28日.陈欣,等:高机动性车辆越野平顺性分析方法研究1评价指标,1.1随机路面行驶IS02631--1:1997(E)标准规定,当振动波形峰值系数<9(峰值系数是加权加速度时间历程的峰值与加权加速度均方根值的比值)时,用基本的评价方法——加权加速度均方根值来评价振动对人体舒适和健康的影响.目前国内针对车辆平顺性的评价也主要采用该方法,在相关文献[1]中已有详细介绍.采用加权加速度均方根值的评价指标的主要缺陷在于该指标考察的是人体所受到的外部作用参数,实际上是座椅加速度信号的处理结果.尽管人体的输入信号与人体的主观感受有一定的关联,但毕竟与人体内的传递特性没有直接的联系.为弥补这一不足,除了采用加权加速度均方根值外,还可以采用人体平均吸收功率作为评价指标,该指标的主要思想是将人体视为一个可以吸收和传递能量的复杂黏弹性系统,当人体处于振动环境下,人体各部分也在发生振动并消耗能量,人体在单位时间内所消耗的能量即为吸收功率.研究发现:如果将人体吸收功率作为评价指标,具有明显的合理性,它与人的主观感觉具有良好的一致性.如果以吸收功率作为评价指标,对以道路行驶为主的汽车,由于更加侧重于长时间行驶的舒适性, 可容忍的吸收功率上限值为0.2~0.3W;超过该值就会在一定时间后感到不舒适.对于越野车辆,追求高舒适性是不现实的,应更加侧重越野条件下的人体承受能力,可容忍的吸收功率上限值为6~10W.国外对同类型车辆的平顺性评价认为乘员的平均吸收功率应不大于6W,并对轻型车辆和中型车辆规定了相应的试验工况.对于8×8重型车辆,由于国内还没有建立起相应的标准,因此暂采用国外标准进行评价.1.2通过半圆障碍行驶人们认为车辆在受到冲击的情况下,人体在车辆行驶时所获得的加速度是造成人体生理损伤的重要因素.为了方便,常将加速度表示为重力加速度g(g=9.8m/s)的倍数.在静止情况下,人体重力为人体的质量乘以g,所以如果人体所受垂直加速度为ng的话,也就相当于质量增加(或减少)了n 倍.由于车辆的垂直方向的冲击是最主要的冲击形式,目前美国针对车辆规定在相应实验车速及半圆障碍高度下,驾驶员座椅上垂直方向峰值加速度不超过2.5g.2多轴车辆模型建立与求解2.1模型假设(1)轮胎的弹性变形与悬架的弹性变形统一考虑为悬架弹簧的弹性变形;(2)汽车对称于其纵轴线,且左,右车轮通过半圆障碍的状态相同,通过随机路面时,路面是各向同性的各态历经随机过程;(3)车辆做匀速直线运动;(4)车架为刚性车架.2.28×8车辆通过随机路面振动模型2.2.1模型的建立与求解简化的车辆2自由度系统模型如图1所示.该模型的悬架系统为独立悬架,口,b,c,d分别表示各桥与质心的距离,整车质量简化为集中质量m,系统绕质心轴的转动惯量为.车辆在通过随机路面时,忽略质心在水平方向的位移,只考虑垂直方向悬架的变形.q,q,q,,q表示路面对相应各桥产生的位移输入;悬架刚度及阻尼参数及其标号见图1,系统位移坐标为质心偏移静平衡位置的铅垂距离和绕质心的转角0.D.一b—c~.I1一一一.,.士.一I萋乏萋岂图1车辆简化模型对该模型进行分析,建立动力学平衡方程如下.r=一Fl—F2一F3一F4【0=一Fla—F2b+F3c+d1{..()其中=-I-aO—ql=z+bO—q2=z一cO—g3=一d一q4(3)式(2)分别计算各轴弹簧对车身的作用力F.,,2/Ll234..Z..++++勿彩====汽车工程2008年(第3O卷)第9期,F4;式(3)分别计算各轴弹簧的变形量z,z,,,其中为车身质心处的垂直位移,0为车身相对于初始位置转动的角度.将式(2),式(3)代人式(1),化简得+C三+ziIlq1+k2q2+3q3+k4q4+A10+c+c2+c3奇3+奇4+A2(4)Jo0+A30+A40=10lgl+62g2一ck3q3一dk4q4+Al+I.aCl垂1+bC2毒2一cC33一dC4圣4+A2三其中C=Cl+C2+C3+C4,K=l+k2+Il}3+|I}4Al=一01—62+c3+4A2=一aC1—6C2+cC3+dC4A3=0,2Cl+6+cG+G4A4=a2kl+b2k2+c2k3+d24求三,0对应于输人9.(t)的频率响应函数日;(j∞),日(j∞),根据单位谐函数法,令ql(t)=e,g2(t)=O,q3(£)=O,q4(t)=0,则Z.c(t)=(j∞)e三(t)=j(j∞)e;.(t)=一/-/.(j∞)e0(t)mIt/o(j∞)e0(t)=joJHo()e0(t)=一0)2(j∞)e将上式代入式(4)得下列方程f(j∞)(一砌+jc∞+)一lt/o一(j)(Al+ja2∞)=.+jccIJI一(j∞)(A+jAz∞)一【一g,(j∞)(一.,c∞+ja3∞+4)=一口(l+jCl∞)解以上方程求得车身位移对路面输入的频率响应函数为()=(.j}1+jcI∞)[a(a1+jA2)+(一+3+A4)](一JcoJ+3OJ'+A4)(一砌+jClm∞+m)一(Al+jA2) ()=(1+jcl∞)[(Al+jA2∞)+口(一砌+jC+Km)](一∞+ja3∞+A4)(一,砌+jcm+)一(Al+.2∞)根据关系式日;一n(j∞)=一一.(j)日一.(j∞)=一∞一.(j)可以分别求出车身质心处垂直加速度及俯仰角加速度对第1桥路面输人的频率响应函数日(j),(j).同理可分别求出兰0对应于各桥输入q:,q,,q的频率响应函数日;.(joJ),Ⅳ(j∞),日一的(j∞),日一,(j∞),日一(j∞),日一(j∞),然后叠加可得整车质心处垂直加速度及俯仰角加速度相对于路面位移输入的总频率响应函数,分别记为日;.一(),日一(j∞).2.2.2评价指标计算(1)加速度均方根值车身质心处垂直加速度响应三的功率谱密度G(可由下式表示G.∽=1日;一q∽12Gq∽=lH∽12G()n.,其中日∽为频率响应函数;G(it/,.)为不平度系数, nrl;为参考空间频率,m~;为车速,m/s.所以车身质心处垂直加速度响应三的均方根值为_【,:G∽酬i=【_f:IH~c-q∽-G∽酬i=2矾【G(n.)f:lH~c-q∽I酬同理可求出车身质心处俯仰角加速度响应0均方根值为_【:G∽酬i=[日09IzG∽酬=2"rrno[G(.)Hii~q09l乘员座椅处位移与质心处位移的关系如图2所示,即=z+,因此对该式求导(不考虑相位差),可得=三+Z.图2与.关系模型而根据均方根值的性质:2=∑一(=2;+z+弓∑[(兰一芝i)(一]2008(v.1.3.)N0.堕!篁!壹主塑塑对于随机路面,可以认为芝与都服奎分布,口车身质心的上下跳动与车身绕质心做{印均围绕在静平衡位置两侧进行,在该情况下可以证明上式中∑[(兰一zc)(日i一J0.此时质心处加速度均方根值,与乘员座椅处加速度均方根值关系可用下式近似计算:2■22其中z关示驶座椅底板中心与质心之间的水平距离.(2)平均吸收功率平均吸收功率可以在时域中进行计算也可以在频域中进行计算.在时域中,P=lira5-jo,,~t)()式中F(t)为人体输入力;(t)为人体输人速度.在频域中,P=∑式中为对应某一频段(用i表示)的加速度均方根值m/s;K为与频率有关的常数.,.K在某一频段中可以认为是常数,通过与人体的传递特性有关的参数求得,所以平均吸收警建是基于对人体的传递函数的确定.由于乘全耋定的关系,因此,找到吸收功率指杯与刀Ⅱ述及列值指标的近似对应关系,对估算吸收功率会来一些方便,具有实际意义.经研究发现这一关系可P以05式59近1o似'~孝18:2650-..0.2—9989(5)=.+.一?J按式(5)计算,当垂直吸收功率为6W时,相应的垂直加速度均方根值;约为2m/s.2.38×8车辆通过半圆障碍振动模型2.3.1模型的建立与求解该模型是车辆通过随机路面时的特殊形式,建立的动力学方程与车辆通过随机路面时类似,!通过半圆障碍对各桥产生的位移输入为q.为』竺析通过半圆障碍对车身振动产生的影响,下面以警1桥为例建立独立悬架车辆过半圆障碍时的动力学模型.南于其考虑第1桥的半圆障碍输入,相当于随由于只考虑第1桥的半圆障碍输人,利当丁腿机输入ql(£)=q,q2(£)=0,q3(f)=0,q()=O,由此得第1桥过半圆障碍模型如图3所示.车辆第1桥在过半圆障碍时,弹簧的变形量z-, I—l.b.:ilIl—I—I一萋Ft妻Lc'm—F3氛~C3妻如C4图3z2,3,z4分别为第1桥过半圆障碍示意图一口(6)将式(2),式(6)代人式(1),化简得『m十Cm之+Km石.:1q+A1+A2f7,i,.+A3+A4:1g+A1+A2三其中C=Cl十C2+C3+CK=kl+k2+k3+k4A1=一ak1一bk2+ck3+dkA2=一aC1一bC2+cC3+dCA3=口C1+6C2+c2C3+d2C4Ad=821+622+c2k3+d2k4据单位谐函数法,设作用在第1桥上的路面不平激励g为单位简谐激振力,可以求出加速度对路面位移输入的频率响应函数分别为日一(j∞), H一f..q得.~到-频-率响应函数后,根据下式求响应的F.u.rier变换,即X()=H(∞)F()其中路面不平激励q(t)的Fourier变换F()∞.1q(£)e-~o,,tdt.对上式进行F0urier反变换,得第1桥过半圆障碍时质心处加速度与时间的关系如下麓‰同理可建立第2.3,4桥过半圆障碍时的模型并求解.2.3.2评价指标计算(1)单位脉冲激励响应各桥输入时车身质心处加速度与时间的关系为c:【麓二;】Fce'dc8,++一一====%740?汽车工程2008年(第3O卷)第9期其中Fi()表示单位脉冲激励(t)的Fourier变换,,∞且Fi(09)=J8f(t)e-joJtdt.J一∞各桥单位脉冲激励之间的关系如下62(t)=61(t—t12)3(t)=l(t—l3)84():6l(t—tl4)t.,£.,£分别表示车辆第2,3,4桥过半圆障碍滞后于车辆第1桥过半圆障碍的时间.根据Fourier变换的位移性质,有(∞)=F1(∞)e(o9)=F1(∞)e()=F1(∞)e代人式(8),得=,?『1e-J~~12e-J13e一"I]e"dto利用Matlab软件编制相应程序,代人相关参数,由以上关系式可分别得到各桥输入对质心加速度的影响,然后叠加可得整车质心处加速度与时间的关系.(2)路面冲击输入响应车辆过半圆障碍时,其输人为路面不平激励g,见图4.已知g与车速和半圆障碍高度h的关系为h而(9)式中h为半圆障碍高度,m;v为车速,km/h;A.为常数,A0=1000,(kin/h).图4通过半圆障碍示意图此时乘员座椅底板处加速度可表示为孑q(£)=q三(t)其中三.(f)表示单位脉冲激励下乘员座椅底板处的加速度,它与质心处加速度三,0的关系(不考虑相位差)为:三()=三.(t)+Z(t)式中Z表示驾驶员座椅底板中心与质心之间的水平距离.根据相关评价标准,为使车辆具有良好的减振缓冲性能,乘员座椅处峰值加速度不应超过2.5g,即max口(t)=max.[p(t)?g]≤2.5g某型8×8独立悬架车辆算例3.1通过随机路面时的平顺性以国内某型8×8独立悬架重型车辆为例,车辆计算参数如表1所示.表1某8x8独立悬架车辆计算参数越野总质量/kg2920oa/m3.7756/m1.825c/m1.825d/m3.325各轴悬架刚度(双侧)/N?m383400各轴悬架阻尼(双侧)IN?s?m9953轮胎刚度(136~204kPa)/N?I11327627将我国c,D,E和F级路面的路谱作为输入,代入以上计算参数,可得加速度均方根值与车速的关系及平均吸收功率与车速的关系分别如图5,图6所示. ∞夏j磐露越曩车速tm?图5加速度均方根值与车速的关系由于车辆的越野条件的平顺性指标与越野极限车速密切相关,因此,提高越野平顺性就可提高越野极限车速,从而提高机动性能.图5中,c,D,E,F曲线分别表示车辆通过C,D,E,F级路面时加速度均方根值随车速变化的情况.图中水平线表示垂直加速度均方根值(约为2m/s)的达标线.从图中可以看出:车辆在C级和D级路面上,在整个车速范陈欣,等:高机动性车辆越野平顺性分析方法研究差藿车~v/lcm?图6平均吸收功率与车速的关系围内均满足平顺性要求;在E级路面上图中所示当车速超过80km/h时,平顺性指标超限,在较差的F 级路面上,车辆的极限车速能仅在20km/h左右.图6中,C,D,E,F曲线分别表示车辆通过c,D,E,F级路面时平均吸收功率随车速变化的情况. 图中水平线表示相当于6W平均吸收功率的达标线.从图中可以看出:车辆在c级和D级路面上,在整个车速范围内均满足平顺性要求,在E级路面上图中所示当车速超过80km/h时,平顺性指标才超限,在较差的F级路面上,车辆的极限车速能保持在20km/h左右,结论与用加速度均方根值作为评价指标一致.3.2通过半圆障碍时平顺性采用与通过随机路面时相同的初始参数,分析车辆在下列两种工况下乘员(驾驶员)座椅处峰值加速度随时间的变化情况分别如图7所示.(1)以15km/h车速通过0.25m高的半圆障碍根据式(9),求出q=0.046mmax三.(f)=max[p(f)?q1]=1.05g(2)以50km/h车速通过0.2m高的半圆障碍根据式(9),求出q=0.143mmax芝,(£)=max[三(£)?q2]=3.2g结果表明,在第一种工况下,车辆的峰值加速度为1.05g<2.5g,满足评价指标要求;在第2种工况下,车辆的峰值加速度为3.2g>2.5g,此时可通过改进车辆减振系统以改善车辆平顺性能,从而降低车辆通过半圆障碍时的峰值加速度.比如降低各轴悬架的刚度,阻尼,表2给出对弹簧有效圈数,中径进行改进前后各轴悬架刚度,阻尼的对比计算结果. 悬架参数改进后,以50km/h车速通过0.2m高的半圆障碍,乘员(驾驶员)座椅处峰值加速度随时蕞趔錾鞲遥蜒剖辩时间/s(a)15^:0.25m:2.5gl",.IIII0器^ll…;n…,,二,.00.10.20.30.40.50.60.7时间,s(b)50IⅡIl/h,h=O.2m图7乘员座椅处峰值加速度随时间的变化关系表2悬架参数改进前后对照表悬架参数改进前改进后弹簧有效圈数1214弹簧中径/mm19020o各轴悬架剐度(双侧)/N?InI13834OO281746各轴悬架阻尼(双侧)/N?s?HI.99538532间的变化情况如图8所示.羹銎鞲世辖凄辩图8悬架参数改进后乘员座椅处峰值加速度随时间的变化关系(下转第735页)3525l5O21O磺畏鹫世蜒域噬聊2008(V o1.30)No.9黄松:中国首批第三代越野汽车东风"猛士"的开发表2东风"猛士"和HumveeA2技术指标对比项目"猛士"HumveeA2装载质量/kgl7501540承载能力质量利用系数O.540.49最高车速/km?hl311l3动力性0~80km/h加速时间/17.121.3越野工况统计油耗/IJ?(1OOkm)11.319.2经济性50km/h等速油耗/L?(1OOkm)10.415.6生存性燃油续驶里程/kml0oO443环境适应性极限高温/℃5546ABS(ASR)系统装备未装备驻车制动器驻坡能力/%4018安全性制动系统承受总质量/t750.4g侧向加速度以上时稳态转向特性稳定不稳定悬架动行程/lnln2702oo平顺性驾驶员座椅处疲劳一工效降低界限/h17.411.7舒适性防雨密封性/分8660维修性故障自诊断系统有无可靠性平均故障间隔里程/km(试验场强化路面)4298420o耐久性悬架球头,转向柱销,车架纵梁,车身地板等主要易损件/km180oo5ooO(试验场强化路面)多次越450mm台阶传动系无问题传动系失效通过性涉水深度/m1.21.2高机动性综合性指标中国定远汽车试验场越野路面最大平均车速/km?hI140.838.2车型系列化短头车身,长头车身高硬顶车型有无运输性指标相当中国人民解放军总装备部汽车试验场,2006.参考文献[2]AmGeraI公司.HmveeA2产品介绍[EB/0L].[20o8—2][1]1.5吨级系列高机动性军用越野汽车设计定型试验报告[R].h"p://-ge".Ial?con/.hi.l.s-hⅡwv?php?(上接第741页)此时max铊(t)=max[三(£)q:]:2.38g,通过半圆障碍的计算模型对车辆以不同试验车满足评价指标要求.速通过相应高度半圆障碍时平顺性进行的分析,使多轴车辆过突起的平顺性问题得到较好的解决.4结论提出了建立和求解8X8独立悬架车辆通过随机路面和半圆障碍的振动模型的方法.通过对车辆行驶在C,D,E,F不同级随机路面时的平顺性进行的分析,通过在加速度均方根值和平均吸收功率满足限定条件与车速关系的表达,揭示了越野平顺性与机动性的关系,使车辆驶过随机道路的越野平顺性的评价更加全面.参考文献[1]余志生.汽车理论(4版)[M].北京:机械工业出版社,2006:202-205.[2]LeeRichardA,PradkoFred.AnalyticalAnalysisofHumanVibra-tion[C].SAEPaper680091.[3]靳晓雄,张立军,江浩.汽车振动分析[M].上海:同济大学出版社.2002:74—81.[4]赵祥君,陈欣,于坤炎.战术轮式车辆理论[M].北京:解放军出版社,2006:144—148.。
任务4.2 汽车平顺性评价
内容
一、汽车平顺性评价方法 二、影响汽车平顺性的因素
(一)、汽车平顺性评价方法
汽车在行驶时,对路面不平度的隔振特性, 称为汽车的平顺性
汽车平顺性评价方法大致可分为主观评价 法和客观评价法。都是基于人体对于汽车振动 的反应做出的评价。
1、主观评价法
依靠评价人员乘坐的主观感觉进行评价,其主 要考虑人的因素。 进行汽车平顺性主观评价时,由其有经验的驾 驶员和乘客组成的专门小组按预定方式驾驶或乘坐 一组车辆来主观评价行驶平顺性的水平或特征;然 后完成相应的主观评价表,最后综合确定车辆的乘 坐舒适性。
(三)提高平顺性的途径
3、座椅 在原有的普通座椅座垫的基础上,增加由弹 簧和减振器所组成的座椅悬置系统,它可以 显著改善汽车的乘坐舒适性。弹簧座椅的刚 度选择要适当,防止因乘客在座位上的振动 频率与车身的振动频率发生重合而引起共振。 另外,对于较硬悬架的车辆,可以采用较软 的座垫;对于具有较软悬架的车辆,可以采 用较硬的座垫。
2、客观评价法
是借助于仪器设备来完成随机振动数据的 采集、记录和处理,通过得到相关的分析值与 对应的限制指标相比较,作出客观评价。 我国参照国际ISO2631的规定,根据我国的具体 情况,制定了《汽车平顺性随机输入试验方 法》,通过实验得出的结论是: (1)评价平顺性的指标主要取决于垂直振动 通过对人体坐姿受振模型的分析,得出的结论 是垂直振动对人的舒适性影响最大。
(3)用车身的固有频率来评价 固有频率是指:弹性元件由于偶然的干扰而离开静平衡位 置,在弹性恢复力的作用下振动的频率。单位为次/min或 Hz(次/秒) 研究表明,人体最适应的频率是60~90次/min,所以希望车 身的固有频率在60~90次/min的范围内。当车身的固有频 率低于40次/min时,会引起晕船的感觉;高于150次/min 时,会有明显的冲击感。
某城市越野车平顺性优化分析
某城市越野车平顺性优化分析作者:长安汽车股份有限公司彭旭阳董益亮摘要:针对某城市越野车粗糙路面行驶车体俯仰较多,抓地性差,过坑洼、减速带时前后悬收敛较差,冲击较大且生硬的问题,应用MSC ADAMS/CAR 软件,建立了该车虚拟样机模型,并对模型进行了验证。
对平顺性进行仿真分析,提出了兼顾操纵稳定性的改进方案。
关键词:MSC ADAMS/CAR,虚拟样机,平顺性,改进1 概述与欧美用户相比,中国乘用车用户普遍注重汽车的平顺性,近年来,中国市场上销量大的乘用车一般都是平顺性较好的汽车。
影响汽车平顺性的因素很多,平顺性优化必须从轮胎、悬架系统、转向系统、车身、座椅、动力总成等方面综合考虑,系统解决。
但方案阶段后期目标确定后,允许有大改动的部分很有限,通常的做法是对样车悬架系统性能参数进行多轮调教,使整车性能最终达到设计目标要求。
汽车作为重要的工业产品,在交通运输及人民的日常生活中起到了越来越重要的作用。
国内、国际市场的竞争日趋激烈,各汽车厂家都希望使自己的产品尽早进入市场。
按照传统的产品开发方式,需要进行多轮的样车试制及路面试验,这样会花费大量的人力、物力,财力,甚至会延误抢占市场的宝贵时间。
为了降低产品开发风险,在实车匹配试验前,利用电子样车进行平顺性和操纵稳定性的仿真分析,为实车匹配试验提供优化的匹配方案就显得十分必要了。
公司某城市越野车粗糙路面行驶车体俯仰较多,抓地性差,过坑洼、减速带时前后悬收敛较差,冲击较大且生硬。
针对该问题,本文建立了该车的虚拟样机模型,对模型进行平顺性仿真分析,提出了改善平顺性的优化方案,提高了实车匹配效率,缩短了匹配周期。
2 模型建立与校验为了提高虚拟样机的建模速度及精度,将整车分解成多个子系统:前悬架、后悬架、转向系、动力总成、轮胎以及车身,对其进行单独建模和调试,最后得到整车模型。
该城市越野车操纵稳定性和平顺性多体模型如图1所示,在建模过程中,充分考虑弹性和阻尼元件的力学特性,连接处橡胶衬套的刚度、阻尼,缓冲块间隙、刚度,螺旋弹簧刚度和减震器阻尼,他们对整车操纵稳定性和平顺性都有很大影响,这些参数主要通过试验手段获得。
汽车平顺性实验报告
一、实验目的本次实验旨在了解汽车平顺性的基本概念,掌握汽车平顺性试验的方法和步骤,通过实际操作,提高对汽车平顺性评价指标的理解,为今后从事汽车性能研究奠定基础。
二、实验原理汽车平顺性是指汽车在行驶过程中,避免因路面不平而产生的振动和冲击,使人感到不舒服、疲劳,甚至损害健康,或者使货物损坏的性能。
汽车平顺性试验主要是通过测量汽车在行驶过程中的振动加速度,来评价汽车的平顺性。
三、实验仪器与设备1. 实验车辆:M类载客汽车2. 加速度传感器:三轴向加速度传感器3. 数据采集仪:INV3060S型智能采集仪4. GPS时间同步装置5. 数据采集和信号处理软件:DASP-V11工程版6. 汽车平顺性分析软件:DASP-汽车平顺性分析软件四、实验方法与步骤1. 实验准备:将加速度传感器安装在座椅靠背处、坐垫上方以及脚支撑板处,采用真人加载,确保实验数据的真实性。
2. 实验数据采集:在脉冲输入(凸块)下,分别以10-60km/h的速度行驶,在随机输入(一般路面)下,分别以40-70km/h的速度行驶。
使用INV3060S型智能采集仪采集各测点的振动加速度响应数据。
3. 数据处理与分析:利用DASP-V11工程版数据采集和信号处理软件,对采集到的数据进行处理,得到最大加速度响应值及总加权加速度均方根值。
4. 汽车平顺性评价:根据处理后的数据,绘制与行车速度的评价关系曲线,分析汽车的平顺性。
五、实验结果与分析1. 实验数据:根据实验数据,得到各测点的最大加速度响应值及总加权加速度均方根值。
2. 汽车平顺性评价:根据评价关系曲线,分析汽车的平顺性。
以座椅靠背处为例,当车速为60km/h时,总加权加速度均方根值为0.5g,说明在此速度下,座椅靠背处的振动较为明显,汽车的平顺性有待提高。
3. 对比分析:将本次实验结果与标准平顺性指标进行对比,分析汽车平顺性的优劣。
六、实验结论1. 本次实验通过对汽车平顺性的实际测量和分析,了解了汽车平顺性的基本概念和评价方法。
汽车平顺性检测实验报告

由此根据公式得 f0hs 1.8893 0.2411
由此根据公式得 f0hx 1.9150
图表前-前上
前上横纵坐标数据:
9.8926 -0.0659 10.0479 0.0906 10.4148 -0.0397
10.7324 0.0117
11.1134 -0.0040
前下横纵坐标数据:
相应轴载质量 前轴 kg;后轴 kg。
空车质量 1105 kg。
相应轴载质量 前轴 kg;后轴 kg。
悬架型式 前端 麦弗逊式独立悬架
后端 扭力梁式拖曳臂悬架
弹性元件型式,主要尺寸参数
前端
后端
减震器型式,主要尺寸参数
前端 液压
后端 液压
轮胎型式和尺寸 前轮 185/60 R15
后轮 185/60 R15
轮胎气压
前轮 2.1bar 后轮2.1bar
轴距
2460mm
轮距 前轮 1460mm
后轮 1460mm
b.测试仪器
比利时LMS公司的振动、噪声测试仪器
c.试验条件
8
产生自由衰减的条件: 滚下法
凸块高度:
120mm
非测试端悬架是否卡死: 否
是否拆下减震器:
否
是否拆下缓冲块:
否
9
1.5898 1.7949 10.1214 10.9630
则可由以上数据计算平均值:车身的固有频率为 f0 2.1874 ,车轮的固有频率为
f 2.5479 ,平均阻尼比为 0.2472
评价:
汽车的固有频率是衡量汽车平顺性的重要参数,它由悬架刚度和悬架弹簧支 承的质量(簧载质量)所决定。人体所习惯的垂直振动频率约为 1~1.6Hz。振 动加速度极限值 应为 0.2g~0.3g。车身振动的固有频率应接近或处于人体适应 的频率范围,才能满足舒适性要求。Ψ值取大,能使振动迅速衰减,但会把路面 较大的冲击传递到车身,Ψ值取小,振动衰减慢,受冲击后振动持续时间长,使 乘客感到不舒服。由实验结果车身以及车轮的固有频率明显大于 1.6Hz。所以整 车的平顺性欠佳。
基于ADAMS的越野车整车平顺性仿真研究及悬架的参数优化的开题报告

基于ADAMS的越野车整车平顺性仿真研究及悬架的参数优化的开题报告一、研究背景越野车是指能够适应未经铺装的路面行驶的车辆,因其具有强大的通过性和横向稳定性,在野外探险、越野竞赛、军事任务等场合有广泛的应用。
在越野车的设计中,整车平顺性是一个非常重要的指标,它直接影响到车辆性能和乘坐的舒适度。
通过采用虚拟仿真技术,可以快速地对整车平顺性进行评估,并且可以快速优化车辆参数,减少测试样车的数量和试验的时间。
二、研究目的本课题旨在使用ADAMS软件对越野车整车平顺性进行仿真研究,并通过对悬架系统的参数优化,提高车辆的平顺性能。
三、研究内容1、越野车整车平顺性标准根据不同的道路条件和车速,制定不同的整车平顺性标准。
2、越野车模型建立及验证使用CATIA软件建立越野车三维模型,导入ADAMS仿真软件进行运动学及动力学仿真,并验证模型合理性。
3、越野车整车平顺性仿真分析根据整车平顺性标准,对越野车进行整车平顺性仿真分析,并对仿真结果进行分析和解读。
4、悬架参数优化根据整车平顺性仿真结果,通过对悬架系统的参数进行优化设计,提高车辆的平顺性能。
5、仿真结果分析与验证通过仿真结果的对比分析和试验验证,验证优化结果的正确性和可靠性。
四、研究意义本次研究可以提高越野车的整车平顺性能,增强车辆的可靠性和安全性,为越野车的设计和生产提供参考,也为后续的仿真研究提供了实际案例。
同时,本次研究也为虚拟仿真技术在汽车设计中的应用提供了一个典型案例。
五、研究方法本研究采用虚拟仿真技术,使用ADAMS软件对越野车整车平顺性进行仿真研究,包括建立模型、运动学及动力学仿真、仿真分析等步骤。
同时,结合试验验证,对仿真结果进行分析和评估,得出优化结论。
六、预期结果1、基于ADAMS软件的越野车整车平顺性仿真分析。
2、越野车悬架系统参数的优化设计。
3、仿真结果的分析与验证,为越野车设计和生产提供参考。
七、研究方案1、文献调研:对越野车整车平顺性、虚拟仿真技术等方面的文献进行调研,并进行梳理。
汽车平顺性试验方法
汽车平顺性试验方法汽车平顺性试验是一种评估汽车悬挂系统和车辆舒适性的测试方法。
平稳性是指车辆在行驶过程中对乘坐者的舒适感的影响。
为了评价汽车的平顺性,试验需要模拟真实道路上的不平整和振动条件。
以下是一种常用的汽车平顺性试验方法。
1. 试验道路选择:选择一段符合标准的测试道路进行试验。
道路应具有代表性,包括不同类型的路面(例如光滑、粗糙、破损等)和不同车速区间。
2. 试验车辆准备:选择一款要测试的汽车,并确保其保持在正常状况。
检查车辆的悬挂系统、轮胎以及其他与平顺性相关的部件是否正常工作。
3. 试验仪器准备:安装用于记录车辆运动、振动和加速度的仪器。
通常使用加速度计、悬挂位移传感器和地形传感器等仪器。
4. 试验参数设定:根据试验需要,设定合适的参数。
例如,车速、振动频率和路面类型等。
5. 试验路段划分:将测试道路划分为不同的路段,以便分析和评估车辆在不同路段上的平顺性表现。
6. 试验数据采集:在试验过程中,通过仪器采集车辆运动、振动和加速度等数据。
数据的采集频率和时长应根据测试需要进行设定。
7. 数据分析与评估:根据试验数据,对车辆的平顺性进行分析和评估。
常用的评估指标包括振动加速度、车身加速度、悬挂位移等。
8. 结果判定与对比:将试验结果与参考标准或其他车型进行对比。
根据对比结果,判断车辆的平顺性表现是否符合要求。
9. 结果报告:最后,编制试验报告,详细描述试验方法、参数设定、数据分析和评估结果。
报告应包括对车辆平顺性进行客观评价的结论和建议。
此外,在实际试验过程中,还需要注意一些细节。
例如,试验过程中应注意安全,尽量避免造成车辆损坏或事故。
同时,还应定期校准仪器,以确保测试结果的准确性。
总结起来,汽车平顺性试验是一种评价汽车舒适性的重要方法。
通过模拟不同路况和振动条件,采集相关数据,并进行分析和评估,可以为改进汽车悬挂系统和提高驾乘舒适性提供指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
普通车辆平顺性客观评价的一般方法与美军及 北约评价军用车辆的方法不同。越野车辆的平顺性 客观评价应综合采用以下两种方法, 即在公路行驶 工况参照 ISO 2631 及其类似标准, 在越野行驶工况 采用基于限值的平顺性评价方 法进行平顺性 客观 评价。
1 ISO 2631 及其类似标准
ISO 2631 是国际 标准化组织制定的评价 人体 承受全身振动的标准。自 1974 年以来, 该标准已经
标准提出采用 最大瞬时振动值和振动 剂量值进行
评价。
最大瞬时振动值 MT V V 可表示为
∀ MT V V = max 1
t
0
1
a
2 w
t
(
t)dt
2
,
t 0-
( 4)
式中: t 0 为瞬时时刻; 为积分时间, 推荐为 1 s.
振动剂量值 V D V ( 单位为 m/ s1 75) 可表示为
∀ VD V=
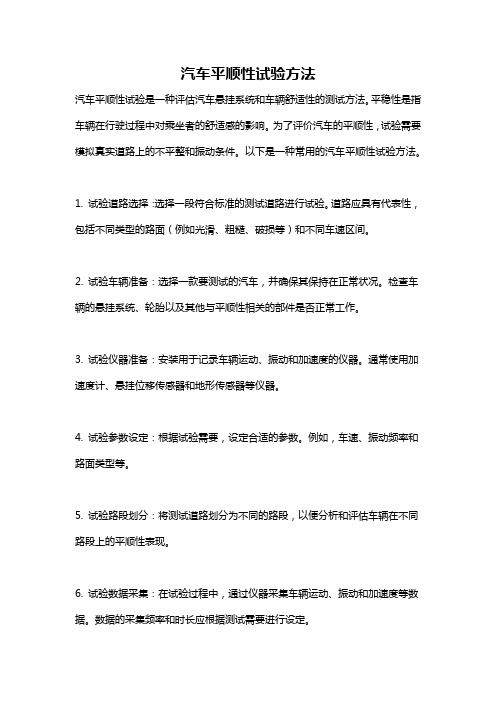
各标准在细节上略有不同, 如图 1[ 5] 和表 1[ 6] 显 示了 BS 6841 与 ISO 2631 ! 1 在频率加权范围、频 率加权函数和轴向加权系数等方面的差别。
图 1 BS 6841: 1987 和 I SO 2631 ! 1: 1997 垂直加速度 加权函数曲线对比
Fig. 1 Compar ison between vertical acceler ation w eig ht ing curves for BS 6841: 1987 and ISO 2631! 1: 1997
T
a
4 wt
(
t
)
d
t
1 4
.
0
( 5)
ISO 2631 ! 1 规 定: 当 振 动 波 形的 峰 值 系 数
( aw t ( t ) 的峰值与 aw t 之比) 小于 9 时, 用 aw t 评价振 动对人体舒适度和健康的影响。当峰值系数大于 9 ( BS 6841: 1987 规定: 当峰值系数大于 6[ 7] ) 或满足
1
atot = [ kdx adwx ) 2+ ( k dyadwy ) 2+ ( k dzadwz ) 2] 2,
( 3)
式中 k dx、k dy、k dz 为方向加权系数。
基本原理与 ISO 2631 ! 1 大致相同的现行标准 还有: BS 6841: 1987、ANSI S3 18: 2002、JIS B 7760! 2: 2004、EN 14253: 2004、AS 2670 1: 2001 及 VDI 2057: 2002 等。
,
也会使获得的
kf
有所差别。但试验大都表明,
i
人体躯干部垂直方向的频率加权函数的最大值出现
在 5 H z 附 近, 这 正 是 人 体 内 脏 器 官 的 共 振 频 率[ 14- 15] 。
用于评价军用车辆乘坐舒适性的试验道路为一
组路面不平度不同的碎石路。路面不平度均方根值
的范 围 较 宽, 如 美 国 Yuma 试验 场 5 号 路 和 Le
T ourneau 测试站 7 号 路的路面不平度 均方根值都 达到了 3 4 in.
由于, F i( t ) 与 v i( t ) 都可以用振动输入点的加
速度 ai( t ) 表示, 故 A A P t 还可表示为
n
∋ A A Pt =
i= 0
kf
i
a
2 f
i
,
( 9)
式中: af i 为 ai( t ) 在频率 f i ( 1 H z ( f i ( 80 H z) 上的
均方根值,
kf
为频率加权系数,
i
如
kf i 已知,
则只需测
量振动输入点的加速度即可算出平均吸收功率。
对于坐姿受振人体, 一般考虑人体躯干部 3 个
方向和脚部垂直方向的振动输入, 但各个方向上的
kf 并不相同。 kf 需要通过大量试验获得, 试验中,
i
i
受试人群 不同或 受试 人自身 状态不 同( 紧张 或松
弛)
第 28 卷第 11 期 2 0 0 7 年 11 月
兵工学报 A CT A AR MA M EN T ARI I
V ol. 28 No. 11 N ov. 2007
越野车辆平顺性评价方法研究
吴志成, 陈思忠, 杨林, 张斌
( 北京理工大学 机械与车辆工程学院, 北京 100081)
摘要: 轮式车辆平顺性的评价体系主要有两类: 一类为 ISO 2631 及其类似标准, 一般用于评
收稿日期: 2006- 03- 17 基金项目: 国家 十五 预先研究项目( 40407030103)
1 39 4
兵工学报
第 28 卷
入点、轴向上的振动对人体影响的差异, 给出了轴向 加权系数。
在时域内, 加权加速度均方根值 awt 为
∀ awt =
1 T
T
0
a
2 w
t
(
t
)
d
t
1 2
,
( 1)
式中: awt ( t ) 为加速度时间历程 a( t ) 经过频率加权 后的加权加速度时间历程; T 为振动分析时间。
中图分类号: U 467 1+ 1
文献标志码: A
文章编号: 1000 1093( 2007) 11 1393 04
Research on Objective Evaluation Criterion for Ride Comfort of Off road Vehicles
WU Zhi cheng, CH EN Si zhong, YANG L in, ZHANG Bin
( School of M echanical and V ehicular Eng ineering, Beijing I nstitute of T echnolog y, Beijing 100081, China)
Abstract : T here are main t wo t ypes of evaluat ion systems for ride comf ort of w heeled vehicles. One e valuat ion systen, includeing ISO 2631 and other similar st andards, is g enerally used to evaluate t he comnen vehicles, t he anot her based on t wo limits, i. e. 6 W average absorbed power and 2 5 g vert ical accelerat ion peak, is used to evaluat e military vehicles by U. S. army and NAT O. T he practice of U. S. arm y in t he past t est if ied t hat t he evaluat ion method based on limits is proper and built on tests. As the ride comfort evaluat ion of of f road vehicle is similiar t o t hat of milit ary vehicle, it is feasible to eval uate t he of f road vehicles by using t he evaluation met hod based on lim it s. Key words: road t ransport at ion; off road vehicle; ride com fort; evaluat ion method
价普通车辆; 另一类为基于 6 W 平均吸收功率和 2 5 g 垂直方向加速度峰值两个限值的评价方法,
一直为美军及北约用于评价军用车辆。美军多年实践证明, 采用基于限值的平顺性评价方法是适
当且有试验依据的。越野车辆的平顺性评价同军用车辆类似, 采用基于限值的平顺性评价方法评
价越野车辆是可行的。
关键词: 公路运输; 越野车辆; 平顺性; 评价方法
位置
方向
轴向加权系数 kd
BS 6841: 1987 ISO 2631 ! 1: 1997
x向
10
14
坐椅
y向
10
14
z向
10
10
靠背
x向
08
08
表 2 振动加速度与人对舒适度的主观 感觉的对应关系
T ab. 2 ISO 2631 ! 1: 1997 g uidelines for levels of comfort for different v ibration magnitudes
2 1 平均吸收功率
20 世纪 60 年代, 美国的 P radko、L ee 和 Butku nas 等人的研究[ 9- 13] 表明: 人们对振动的主观感受 与人体吸收的振动能量有关。故他们建议用平均吸
收功率评价振动对人体的影响。
在时域内, 平均吸收功率 A A Pt 可表示为
∀ A A Pt =
的峰值系数大多小于 6[ 8] , 故可采用 ISO 2631 及其 类似标准评价普通车辆和越野 车辆的公路行 驶平
顺性。
2 基于限值的平顺性评价方法
美军及北约评价军用车辆平顺性包括乘坐舒适
性和抗冲击性两方面内容, 分别基于 6 W 平均吸收
功率和 2 5 g 垂直方向加速度峰值两个限值 Nhomakorabea行 评价。
对于评价指标, ISO 2631 ! 1 推荐了振 动加速 度与人 对舒 适度 的主 观 感觉 的对 应关 系, 如表 2 所示。