GPS数据分析
GPS精密单点定位数据处理分析
GPS精密单点定位数据处理分析在信息技术快速发展的过程中,GPS研究领域中的GPS精密单点定位技术是當前一项研究的热点。
本文就GPS精密单点定位数据处理进行简单分析。
标签:GPS精密单点定位数据处理0前言在过去的GPS应用中,采用都是相对定位的操作方式进行应用。
在使用的过程中通过组成观察两者之间出现的数值,消除各部分之间产生的差值影响,以此来达到高精度的目的。
在使用这种方式的过程中,不会将复杂的误差模型应用在内。
通常指需要采用简单的模型进行精度定位就可以。
但是,相较于目前应用GPS的实际情况来看,依然存在着不少的问题。
在作业的过程中之应用一台接收装置尽心观测,对作业的效率造成影响,同时还使得作业才成本相应增加。
在条件不同的情况,影响也各不相同。
GPS精密单点定位能够有效克服这方面的问题。
同时还能够直接应用,有效解决问题,使得其应用范围前景非常可观。
1 GPS精密单点定位原理与数学模型了解GPS精密单点定位原理与数学模型。
这两方面的认识是开展相关研究活动的前提。
1.1 GPS精密单点定位原理精密单点定位(PrecisePointPositioning)研发的起源是绝对定位思想[1]。
但是精密单点定位相较于常规的绝对定位具有一定的不同之处。
精密单点定位进行定位计算的坐标与钟差主要来源于国际GNSS服务机构IGS提供的相对精度较高的卫星轨道信息与钟差信息。
在使用的过程中出需要应用到观测值,还需要使用载波相位观测值。
与此同时,在误差处理的过程中相较于其他的绝对定位思想存在一定的不同之处。
在误差数据处理的过程中,精密单点定位利用各种模型将观测值进行组合,进而小若或者完善其中产生的误差。
1.2 GPS精密单点定位数学模型首先,传统模型。
在GPS精密单点定位过程中所应用到的传统模型主要采用的载波相位与双频GPS观测点离层,进行组合观测模型。
传统模型组成的共识公示通常是该领域最有名的公式。
将这种模型的公式进行简化如下所示:其次,UofC 模型。
出租车载GPS轨迹数据挖掘与分析

出租车载GPS轨迹数据挖掘与分析一、引言GPS轨迹数据是由出租车上的GPS设备记录下的车辆位置、时间和速度等信息。
这种数据是实时生成的,包含大量的时间序列信息,具有重要的研究和应用价值。
本文将针对出租车载GPS轨迹数据展开挖掘与分析,探讨其应用于出行规划、交通流量预测等方面的潜力。
二、数据预处理由于GPS设备录制的数据存在定位偏差、缺失、误差等问题,需要对数据进行预处理。
预处理包括数据去噪、数据对齐、数据清洗等步骤。
1.数据去噪:通过滤波算法去除GPS轨迹中的噪声。
常用的滤波算法有移动平均滤波、中值滤波、卡尔曼滤波等。
2.数据对齐:将不同出租车的数据对齐,以便进行统一的分析。
可以使用时间对齐或地理位置对齐的方法。
3.数据清洗:对轨迹进行剔除异常值和重复数据等处理,确保数据的合理性和准确性。
三、基本统计分析在对GPS轨迹数据进行挖掘和分析之前,首先进行基本的统计分析,对数据的分布、特征进行了解。
1.车辆数量统计:统计不同时间段内出租车的数量变化情况,了解城市交通的高峰时段和低谷时段。
2.车辆行驶距离统计:统计不同车辆在不同时间段内的行驶距离分布,了解车辆的使用情况和行驶习惯。
3.行驶速度统计:统计不同时间段内车辆的平均速度分布,探究城市道路的交通状况和拥堵情况。
四、出行规律挖掘通过对GPS轨迹数据的挖掘和分析,可以发现人们的出行规律,进而为出行规划提供有针对性的建议。
1.出租车热点区域分析:通过聚类算法,发现城市的出行热点区域,为出租车的运营提供参考,优化车辆调度和资源配置。
2.出行时间分析:统计不同时间段内的出行量,了解城市交通的高峰和低谷时段,为交通拥堵预警和出行规划提供依据。
3.轨迹相似性挖掘:通过轨迹相似性算法,找出相似的轨迹,为出行规划提供参考,缩短出行时间和交通拥堵。
五、交通流量预测基于GPS轨迹数据的挖掘和分析,可以预测城市的交通流量,为交通管理和出行规划提供决策支持。
1.交通流量预测模型:建立交通流量预测模型,根据历史数据和实时数据,预测不同时间段和地点的交通流量,为交通信号控制和路线规划提供参考。
基于多源数据的城市交通分析

基于多源数据的城市交通分析一、概述城市交通问题一直是城市发展和居民出行的瓶颈,在实际交通运营中,城市交通的流量、拥堵、安全、环保等问题愈加凸显。
为了解决这些问题,交通专家、政策制定者等人士需要综合考虑各种因素,因而需要采用多源数据进行城市交通分析。
本文介绍多源数据的城市交通分析方法,并重点介绍了三种数据类型:GPS数据、智能传感器数据和行程需求数据。
在实践中,交通分析师们通常会从这些数据中提取出有用的信息,例如交通流、拥堵状况、交通行为分析、交通模式分析等等。
二、GPS数据分析GPS数据是指通过全球卫星导航系统采集而来的交通位置信息数据。
GPS数据可通过车辆定位装置等方式采集,再通过算法进行处理和分析,从而获得全局和局部交通信息。
GPS数据对计算交通事故、导航、实时交通信息、维护基础交通设施和其他应用领域有重要贡献。
在城市交通分析中,个体轨迹研究是一种基于GPS的交通研究方法。
该方法在交通流、拥堵状况、路径选项、乘坐时间、交通工具使用率等方面具有很高的准确性。
此外,该方法还可以帮助交通管理部门进行决策制定,例如路线规划优化、出行时间安排等。
三、智能传感器数据分析智能传感器是一种物联网设备,可对交通数据进行实时监测和统计。
智能传感器通常安装在道路上,可采集交通流、交通速度、车流密度、车道变化、车辆类型等数据。
智能传感器可以提供实时交通问题解决方案,同时也能帮助交通管理部门制定交通政策。
在城市交通分析中,智能传感器数据可用于城市交通通行研究、路线规划及预测、拥堵分析和控制,以及交通指标监测,例如坐车时间、行驶距离和交通速度等。
四、行程需求数据分析行程需求数据是指采集到的关于出行需求和偏好的数据。
行程需求数据通常使用在线调查、电话调查、问卷调查等方式采集,以及通过交通工具及其他介质收集数据。
通过行程需求数据可以了解到出行需求的模式、方向、时间和交通工具需求等方面的差异,了解公众对于城市交通设施的需求。
GPS 输出数据的格式分析
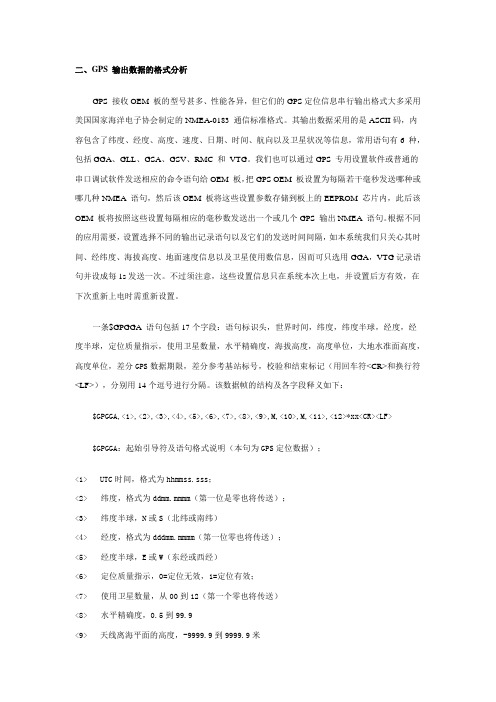
二、GPS输出数据的格式分析GPS接收OEM板的型号甚多、性能各异,但它们的GPS定位信息串行输出格式大多采用美国国家海洋电子协会制定的NMEA-0183通信标准格式。
其输出数据采用的是ASCII码,内容包含了纬度、经度、高度、速度、日期、时间、航向以及卫星状况等信息,常用语句有6种,包括GGA、GLL、GSA、GSV、RMC和VTG。
我们也可以通过GPS专用设置软件或普通的串口调试软件发送相应的命令语句给OEM板,把GPS OEM板设置为每隔若干毫秒发送哪种或哪几种NMEA语句,然后该OEM板将这些设置参数存储到板上的EEPROM芯片内,此后该OEM板将按照这些设置每隔相应的毫秒数发送出一个或几个GPS输出NMEA语句。
根据不同的应用需要,设置选择不同的输出记录语句以及它们的发送时间间隔,如本系统我们只关心其时间、经纬度、海拔高度、地面速度信息以及卫星使用数信息,因而可只选用GGA,VTG记录语句并设成每1s发送一次。
不过须注意,这些设置信息只在系统本次上电,并设置后方有效,在下次重新上电时需重新设置。
一条$GPGGA语句包括17个字段:语句标识头,世界时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,水平精确度,海拔高度,高度单位,大地水准面高度,高度单位,差分GPS数据期限,差分参考基站标号,校验和结束标记(用回车符<CR>和换行符<LF>),分别用14个逗号进行分隔。
该数据帧的结构及各字段释义如下:$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx<CR><LF>$GPGGA:起始引导符及语句格式说明(本句为GPS定位数据);<1> UTC时间,格式为hhmmss.sss;<2> 纬度,格式为ddmm.mmmm(第一位是零也将传送);<3> 纬度半球,N或S(北纬或南纬)<4> 经度,格式为dddmm.mmmm(第一位零也将传送);<5> 经度半球,E或W(东经或西经)<6> 定位质量指示,0=定位无效,1=定位有效;<7> 使用卫星数量,从00到12(第一个零也将传送)<8> 水平精确度,0.5到99.9<9> 天线离海平面的高度,-9999.9到9999.9米M 指单位米<10>大地水准面高度,-9999.9到9999.9米M 指单位米<11>差分GPS数据期限(RTCM SC-104),最后设立RTCM传送的秒数量<12> 差分参考基站标号,从0000到1023(首位0也将传送)。
GPS数据分析
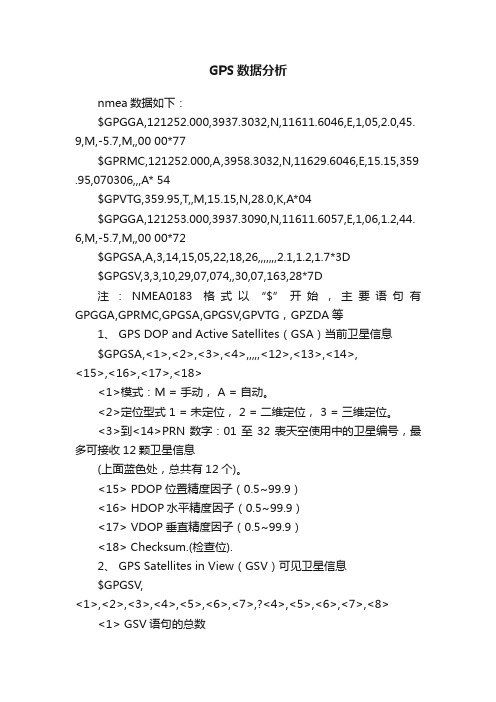
GPS数据分析nmea数据如下:$GPGGA,121252.000,3937.3032,N,11611.6046,E,1,05,2.0,45. 9,M,-5.7,M,,00 00*77$GPRMC,121252.000,A,3958.3032,N,11629.6046,E,15.15,359 .95,070306,,,A* 54$GPVTG,359.95,T,,M,15.15,N,28.0,K,A*04$GPGGA,121253.000,3937.3090,N,11611.6057,E,1,06,1.2,44. 6,M,-5.7,M,,00 00*72$GPGSA,A,3,14,15,05,22,18,26,,,,,,,2.1,1.2,1.7*3D$GPGSV,3,3,10,29,07,074,,30,07,163,28*7D注:NMEA0183格式以“$”开始,主要语句有GPGGA,GPRMC,GPGSA,GPGSV,GPVTG,GPZDA等1、 GPS DOP and Active Satellites(GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<4>,,,,,<12>,<13>,<14>,<15>,<16>,<17>,<18><1>模式:M = 手动, A = 自动。
<2>定位型式 1 = 未定位, 2 = 二维定位, 3 = 三维定位。
<3>到<14>PRN 数字:01 至 32 表天空使用中的卫星编号,最多可接收12颗卫星信息(上面蓝色处,总共有12个)。
<15> PDOP位置精度因子(0.5~99.9)<16> HDOP水平精度因子(0.5~99.9)<17> VDOP垂直精度因子(0.5~99.9)<18> Checksum.(检查位).2、 GPS Satellites in View(GSV)可见卫星信息$GPGSV,<1>,<2>,<3>,<4>,<5>,<6>,<7>,?<4>,<5>,<6>,<7>,<8><1> GSV语句的总数<2> 本句GSV的编号<3> 可见卫星的总数,00 至 12。
GPS数据格式与分析
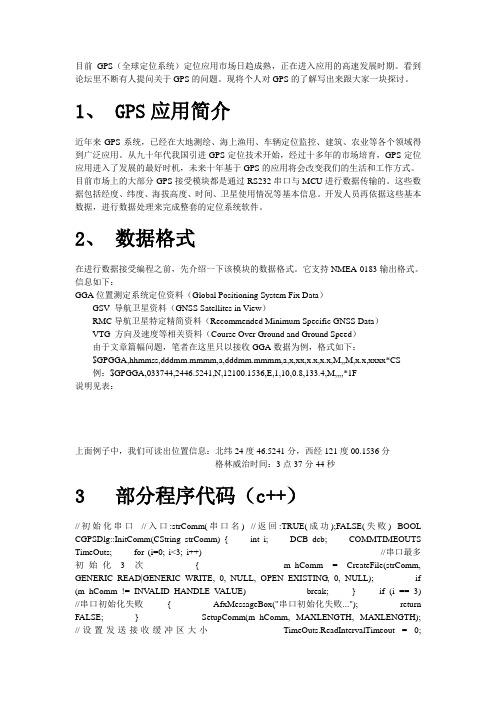
目前GPS(全球定位系统)定位应用市场日趋成熟,正在进入应用的高速发展时期。
看到论坛里不断有人提问关于GPS的问题。
现将个人对GPS的了解写出来跟大家一块探讨。
1、 GPS应用简介近年来GPS系统,已经在大地测绘、海上渔用、车辆定位监控、建筑、农业等各个领域得到广泛应用。
从九十年代我国引进GPS定位技术开始,经过十多年的市场培育,GPS定位应用进入了发展的最好时机,未来十年基于GPS的应用将会改变我们的生活和工作方式。
目前市场上的大部分GPS接受模块都是通过RS232串口与MCU进行数据传输的。
这些数据包括经度、纬度、海拔高度、时间、卫星使用情况等基本信息。
开发人员再依据这些基本数据,进行数据处理来完成整套的定位系统软件。
2、数据格式在进行数据接受编程之前,先介绍一下该模块的数据格式。
它支持NMEA-0183输出格式。
信息如下:GGA位置测定系统定位资料(Global Positioning System Fix Data)GSV 导航卫星资料(GNSS Satellites in View)RMC导航卫星特定精简资料(Recommended Minimum Specific GNSS Data)VTG 方向及速度等相关资料(Course Over Ground and Ground Speed)由于文章篇幅问题,笔者在这里只以接收GGA数据为例,格式如下:$GPGGA,hhmmss,dddmm.mmmm,a,dddmm.mmmm,a,x,xx,x.x,x.x,M,,M,x.x,xxxx*CS例:$GPGGA,033744,2446.5241,N,12100.1536,E,1,10,0.8,133.4,M,,,,*1F说明见表:上面例子中,我们可读出位置信息:北纬24度46.5241分,西经121度00.1536分格林威治时间:3点37分44秒3 部分程序代码(c++)//初始化串口//入口:strComm(串口名) //返回:TRUE(成功);FALSE(失败) BOOL CGPSDlg::InitComm(CString strComm) { int i; DCB dcb; COMMTIMEOUTS TimeOuts; for (i=0; i<3; i++) //串口最多初始化3次{ m_hComm = CreateFile(strComm, GENERIC_READ|GENERIC_WRITE, 0, NULL, OPEN_EXISTING, 0, NULL); if (m_hComm != INV ALID_HANDLE_V ALUE) break; } if (i == 3) //串口初始化失败{ AfxMessageBox("串口初始化失败..."); return FALSE; } SetupComm(m_hComm, MAXLENGTH, MAXLENGTH); //设置发送接收缓冲区大小TimeOuts.ReadIntervalTimeout = 0;//设定5个超时参数TimeOuts.ReadTotalTimeoutMultiplier = 0; TimeOuts.ReadTotalTimeoutConstant = 500; TimeOuts.WriteTotalTimeoutMultiplier = 0; TimeOuts.WriteTotalTimeoutConstant = 500; SetCommTimeouts(m_hComm, &TimeOuts); //设置超时参数GetCommState(m_hComm, &dcb); //获得通信状态dcb.fAbortOnError = FALSE; //有错误不停止dcb.BaudRate = CBR_4800; //波特率4800 dcb.ByteSize = 8; //8位dcb.Parity = NOPARITY; //奇校验dcb.StopBits = ONESTOPBIT; //1位停止位SetCommState(m_hComm, &dcb); //设置通信状态PurgeComm(m_hComm, PURGE_TXCLEAR|PURGE_RXCLEAR); //清空发送和接收缓冲区return TRUE; } //获得GPS参数//注意:从GPS接收到的字符串已经在m_strRecv中,由于是定时接收,所以在这个字符串的头和尾都可能存在// 不完整的NMEA输出字符串,在处理时要特别注意//返回:TRUE(格式正确);FALSE(格式错误) BOOL CGPSDlg::GetGPSParam() { int i,j; CString str,strNEMA; //先判断是否接收到数据if (m_strRecv.IsEmpty()) return FALSE; //若字符串不是以'$'开头的,必须删掉这部分不完整的if (m_strRecv[0] != '$') { i = m_strRecv.Find('\n', 0); if (i == -1) return FALSE; //尾部未接收完整,必须等接收完后才能删除m_strRecv.Delete(0, i+1); //尾部已接收完整(尾部为\r\n结束),删除不完整的部分} //截取完整的NMEA-0183输出语句(m_strRecv中可能有多条语句,每条间以\r\n分隔) for (;;) { i = m_strRecv.Find('\n', 0); if (i == -1) break; //所有的完整输出语句都已经处理完毕,退出循环//截取完整的NMEA-0183输出语句strNEMA = m_strRecv.Left(i+1); m_strRecv.Delete(0, i+1); //下面对各种输出语句进行分别处理if (strNEMA.Find("$GPRMC",0) == 0) { //该输出语句中的各项以','分隔for (i=j=0; strNEMA!='\r'; i++) //j为逗号的计数器{ if (strNEMA == ',') { j++; str = ""; for (i++; strNEMA!=','&&strNEMA!='\r'; i++) str += strNEMA; //str为某项的值i--; //对各项数据分别处理switch (j) { case 1: //时间(UTC) m_strTime = str.Left(6); m_strTime.Insert(2, ':'); m_strTime.Insert(5, ':'); break; case 2: //状态(A-数据有效;V-数据无效,还未定位) if (str == "A") m_strStatus = "有效数据"; else if(str == "V") m_strStatus = "正在定位..."; else m_strStatus = "非法数据格式"; break; case 3: //纬度(ddmm.mmmm) str.Insert(2, "度"); str += "分"; m_strLatitude = str; break; case 4: //纬度指示(N-北纬;S-南纬) if (str == "N") m_strLatitude.Insert(0, "北纬"); else m_strLatitude.Insert(0, "南纬"); break;case 5: //经度(dddmm.mmmm) str.Insert(3, "度"); str += "分"; m_strLongitude = str; break; case 6: //经度指示(E-东经;W-西经) if (str == "E") m_strLongitude.Insert(0, "东经"); else m_strLongitude.Insert(0, "西经"); break; case 7: //速度(单位:节) m_strSpeed = str; break; case 8: //航向(单位:度) m_strCourse = str; break; case 9: //日期(UTC) m_strDate = ""; m_strDate += "20"; m_strDate += str[4]; m_strDate += str[5]; m_strDate += "-"; m_strDate += str[2]; m_strDate += str[3]; m_strDate += "-"; m_strDate += str[0]; m_strDate += str[1]; break; default: break; } } } } else if (strNEMA.Find("$GPGGA",0) == 0) { } else if (strNEMA.Find("$GPGSA",0) == 0) { } else if (strNEMA.Find("$GPGSV",0) == 0) { } else if (strNEMA.Find("$GPGLL",0) == 0) { } else if (strNEMA.Find("$GPVTG",0) == 0) { } else return FALSE; //格式错误} return TRUE; } 相关的主题文章:-------------------------------------------------------------------------------------------------------一、NMEA0183标准语句1、 Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF><1> UTC时间,hhmmss(时分秒)格式<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3> 纬度半球N(北半球)或S(南半球)<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5> 经度半球E(东经)或W(西经)<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算<7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)<9> 海拔高度(-9999.9~99999.9)<10> 地球椭球面相对大地水准面的高度<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)2、 GPS DOP and Active Satellites (GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh<CR ><LF><1> 模式,M=手动,A=自动<2> 定位类型,1=没有定位,2=2D定位,3=3D定位<3> PRN码(伪随机噪声码),正在用于解算位置的卫星号(01~32,前面的0也将被传输)。
测绘技术中的GPS定位与GIS空间数据分析
测绘技术中的GPS定位与GIS空间数据分析导语:随着科技的不断进步,测绘技术也得到了巨大的发展。
在测绘领域,GPS定位和GIS空间数据分析成为了不可或缺的重要工具。
本文将从GPS定位和GIS空间数据分析的原理与应用,以及对测绘技术的作用与影响等方面展开阐述。
一、GPS定位技术的原理与应用GPS全球定位系统(Global Positioning System)是利用地球上的卫星进行全球定位的一种技术。
它由一组空间部分和地面部分组成,其中空间部分由一系列导航卫星构成,地面部分由控制站和用户接收机组成。
GPS定位技术的原理是基于卫星信号测量和三角测量原理,通过接收卫星发出的无线电波并测量信号传输的时间,从而计算出接收机所在位置的经纬度和高程。
GPS定位技术在测绘领域具有广泛的应用。
首先,它可以实现地图制作中的精确定位,为地图的更新和维护提供了可靠的数据来源。
其次,GPS定位技术可以在地勘、土地规划和城市建设等方面提供精确的空间定位信息。
再者,它还可以应用于灾害监测、环境保护和资源调查等领域,提供准确的地理信息支持。
二、GIS空间数据分析的原理与应用GIS地理信息系统(Geographic Information System)是将地理数据和信息进行整合、储存、管理、分析和显示的一种计算机系统。
它包括硬件、软件和数据三个基本组成部分。
GIS空间数据分析是其中的重要功能之一,它利用空间关系和地理统计方法等技术手段,对地理要素和现象进行数据分析和模拟,以揭示其空间分布和相互关系。
GIS空间数据分析广泛应用于测绘领域。
首先,它可以实现地理信息数据的可视化和图形化展示,使得数据的含义和空间关系更加直观明了。
其次,GIS空间数据分析可以进行地理统计和大数据分析,为决策者提供精确的空间信息支持。
再者,它还可以进行地理模型和预测,为城市规划和土地利用等方面提供科学的依据。
三、GPS定位与GIS空间数据分析对测绘技术的影响GPS定位和GIS空间数据分析对测绘技术的发展有着深远的影响。
简述gps数据处理基本流程和步骤

简述gps数据处理基本流程和步骤GPS(全球定位系统)数据处理是将采集到的GPS信息进行处理和分析,从而得出有用的信息和结果的过程。
GPS数据处理基本流程可以分为数据采集、数据预处理、数据分析和结果展示四个步骤。
下面将分别介绍这四个步骤的具体内容。
首先是数据采集阶段。
GPS数据的采集是通过GPS接收器获得,GPS接收器可以测量卫星信号和计算位置、速度、时间、姿态等信息。
GPS接收器具有天线接收GPS信号,接收到的信号包括卫星信号和地面干扰信号,卫星信号是由美国国家航空航天局的卫星发出的,地面干扰信号则是由城市的建筑物、树木等形成的。
接收到的信号会被GPS 接收器搜集并保存下来,形成GPS原始数据。
接着是数据预处理阶段。
在数据预处理阶段,需要对采集到的GPS 原始数据进行清洗和筛选。
清洗就是对数据进行去噪声,去除异常值等处理,保证数据的准确性和可靠性。
筛选则是对数据进行筛选,选择需要的数据进行后续处理。
此外,还需要对数据进行校正,如时钟误差校正、电离层延迟校正等,保证数据的精度和稳定性。
然后是数据分析阶段。
数据分析是对预处理过的GPS数据进行处理和分析,从中提取有用的信息。
主要包括轨迹重建、速度计算、加速度计算、路网匹配等过程。
轨迹重建是将GPS数据点连接成轨迹,并对轨迹进行分段处理。
速度计算是根据轨迹数据计算车辆的速度,加速度计算是根据速度数据计算车辆的加速度。
路网匹配是将轨迹数据匹配到实际的道路上,得到车辆在道路上的行驶轨迹。
最后是结果展示阶段。
在结果展示阶段,将数据分析得到的结果以可视化的方式展示出来,使用户能够直观地了解分析结果。
主要包括轨迹图、速度图、加速度图、轨迹匹配图等展示方式。
公路交通部门可以通过这些展示结果了解车辆的行驶轨迹、行驶速度和行驶状态,为交通管理和规划提供有力的数据支持。
综上所述,GPS数据处理的基本流程包括数据采集、数据预处理、数据分析和结果展示四个步骤。
在实际应用中,每个步骤都需要仔细处理和精心设计,才能得到准确、可靠的分析结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
nmea数据如下:$GPGGA,121252.000,3937.3032,N,11611.6046,E,1,05,2.0,45.9,M,-5.7,M,,00 00*77$GPRMC,121252.000,A,3958.3032,N,11629.6046,E,15.15,359.95,070306,,,A* 54$GPVTG,359.95,T,,M,15.15,N,28.0,K,A*04$GPGGA,121253.000,3937.3090,N,11611.6057,E,1,06,1.2,44.6,M,-5.7,M,,00 00*72$GPGSA,A,3,14,15,05,22,18,26,,,,,,,2.1,1.2,1.7*3D$GPGSV,3,3,10,29,07,074,,30,07,163,28*7D注:NMEA0183格式以“$”开始,主要语句有GPGGA,GPRMC,GPGSA,GPGSV,GPVTG,GPZDA等1、 GPS DOP and Active Satellites(GSA)当前卫星信息$GPGSA,<1>,<2>,<3>,<4>,,,,,<12>,<13>,<14>, <15>,<16>,<17>,<18><CR><LF ><1>模式:M = 手动, A = 自动。
<2>定位型式 1 = 未定位, 2 = 二维定位, 3 = 三维定位。
<3>到<14>PRN 数字:01 至 32 表天空使用中的卫星编号,最多可接收12颗卫星信息(上面蓝色处,总共有12个)。
<15> PDOP位置精度因子(0.5~99.9)<16> HDOP水平精度因子(0.5~99.9)<17> VDOP垂直精度因子(0.5~99.9)<18> Checksum.(检查位).2、 GPS Satellites in View(GSV)可见卫星信息$GPGSV, <1>,<2>,<3>,<4>,<5>,<6>,<7>,?<4>,<5>,<6>,<7>,<8><CR><LF><1> GSV语句的总数<2> 本句GSV的编号<3> 可见卫星的总数,00 至 12。
<4> 卫星编号, 01 至 32。
<5>卫星仰角, 00 至 90 度。
<6>卫星方位角, 000 至 359 度。
实际值。
<7>讯号噪声比(C/No), 00 至 99 dB;无表未接收到讯号。
<8>Checksum.(检查位).第<4>,<5>,<6>,<7>项个别卫星会重复出现,每行最多有四颗卫星。
其余卫星信息会于次一行出现,若未使用,这些字段会空白。
3、Global Positioning System Fix Data(GGA)GPS定位信息$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR>< LF><1> UTC时间,hhmmss(时分秒)格式<2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<3> 纬度半球N(北半球)或S(南半球)<4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<5> 经度半球E(东经)或W(西经)<6> GPS状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算<7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)<8> HDOP水平精度因子(0.5~99.9)<9> 海拔高度(-9999.9~99999.9)<10> 地球椭球面相对大地水准面的高度<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)<12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)4、Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐定位信息$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh<CR><LF><1> UTC时间,hhmmss(时分秒)格式<2> 定位状态,A=有效定位,V=无效定位<3> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<4> 纬度半球N(北半球)或S(南半球)<5> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)<6> 经度半球E(东经)或W(西经)<7> 地面速率(000.0~999.9节,前面的0也将被传输)<8> 地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)<9> UTC日期,ddmmyy(日月年)格式<10> 磁偏角(000.0~180.0度,前面的0也将被传输)<11> 磁偏角方向,E(东)或W(西)<12> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)5、 Track Made Good and Ground Speed(VTG)地面速度信息$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh<CR><LF><1> 以真北为参考基准的地面航向(000~359度,前面的0也将被传输)<2> 以磁北为参考基准的地面航向(000~359度,前面的0也将被传输)<3> 地面速率(000.0~999.9节,前面的0也将被传输)<4> 地面速率(0000.0~1851.8公里/小时,前面的0也将被传输)<5> 模式指示(仅NMEA0183 3.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)6、GPZDA日期和时间$GPZDA,<1>,<2>, <3> , <4> , <5> , <6> *CC<CR><LF><1> UTC时间,hhmmss(时分秒)格式<2> 日<3> 月<4> 年<5> 本地时区小时便宜量<6>本地时区分钟便宜量NMEA目录NMEA简介$GPGGA(定位信息)$GPGSA(当前卫星信息)$GPGSV(可见卫星信息)$GPRMC(推荐定位信息数据格式)$GPVTG(地面速度信息)$GPGLL(地理定位信息)编辑本段NMEA简介NMEA是全国海洋电子协会(National Marine Electronics Association);国际海上电子协会(National Marine Electronics Association)或(National Marine Electronics Association)获得国际海事电子协会缩写,同时也是数据传输标准工业协会,在这里,实际上应为NMEA 0183。
它是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的ASCII格式,逗点隔开数据流,数据流长度从30-100字符不等,通常以每秒间隔选择输出,最常用的格式为"GGA",它包含了定位时间,纬度,经度,高度,定位所用的卫星数,DOP值,差分状态和校正时段等,其他的有速度,跟踪,日期等。
NMEA实际上已成为所有的GPS接收机和最通用的数据输出格式,同时它也被用于与GPS接收机接口的大多数的软件包里。
NMEA-0183协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL 等。
下面给出这些常用NMEA-0183语句的字段定义解释。
编辑本段$GPGGA(定位信息)例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1 F 字段0:$GPGGA,语句ID,表明该语句为Global Positioning System Fix Data(GGA)GPS定位信息字段1:UTC 时间,hhmmss.sss,时分秒格式字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段3:纬度N (北纬)或S(南纬)字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段5:经度E(东经)或W(西经)字段6:GPS状态,0=不可用(FIX NOT valid),1=单点定位(GPS FIX),2=差分定位(DGPS),3=无效PPS,4=实时差分定位(RTK FIX),5=RTK FLOAT,6=正在估算字段7:正在使用的卫星数量(00 - 12)(前导位数不足则补0)字段8:HDOP水平精度因子(0.5 - 99.9)字段9:海拔高度(-9999.9 - 99999.9)字段10:地球椭球面相对大地水准面的高度字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)字段12:差分站ID号0000 - 1023(前导位数不足则补0,如果不是差分定位将为空)字段13:校验值编辑本段$GPGSA(当前卫星信息)例:$GPGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A 字段0:$GPGSA,语句ID,表明该语句为GPS DOP and Active Satellites(GSA)当前卫星信息字段1:定位模式,A=自动手动2D/3D,M=手动2D/3D 字段2:定位类型,1=未定位,2=2D定位,3=3D定位字段3:PRN码(伪随机噪声码),第1信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段4:PRN码(伪随机噪声码),第2信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段5:PRN码(伪随机噪声码),第3信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段6:PRN码(伪随机噪声码),第4信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段7:PRN码(伪随机噪声码),第5信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段8:PRN码(伪随机噪声码),第6信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段9:PRN码(伪随机噪声码),第7信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段10:PRN码(伪随机噪声码),第8信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段11:PRN码(伪随机噪声码),第9信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段12:PRN码(伪随机噪声码),第10信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段13:PRN码(伪随机噪声码),第11信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段14:PRN码(伪随机噪声码),第12信道正在使用的卫星PRN码编号(00)(前导位数不足则补0)字段15:PDOP综合位置精度因子(0.5 - 99.9)字段16:HDOP水平精度因子(0.5 - 99.9)字段17:VDOP垂直精度因子(0.5 - 99.9)字段18:校验值编辑本段$GPGSV(可见卫星信息)例:$GPGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70字段0:$GPGSV,语句ID,表明该语句为GPS Satellites in View(GSV)可见卫星信息字段1:本次GSV语句的总数目(1 - 3)字段2:本条GSV语句是本次GSV语句的第几条(1 - 3)字段3:当前可见卫星总数(00 - 12)(前导位数不足则补0)字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段5:卫星仰角(00 - 90)度(前导位数不足则补0)字段6:卫星方位角(00 - 359)度(前导位数不足则补0)字段7:信噪比(00-99)dbHz 字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段9:卫星仰角(00 - 90)度(前导位数不足则补0)字段10:卫星方位角(00 - 359)度(前导位数不足则补0)字段11:信噪比(00-99)dbHz 字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不足则补0)字段13:卫星仰角(00 - 90)度(前导位数不足则补0)字段14:卫星方位角(00 - 359)度(前导位数不足则补0)字段15:信噪比(00-99)dbHz 字段16:校验值编辑本段$GPRMC(推荐定位信息数据格式)例:$GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,,,A* 50 字段0:$GPRMC,语句ID,表明该语句为Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐最小定位信息字段1:UTC时间,hhmmss.sss 格式字段2:状态,A=定位,V=未定位字段3:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段4:纬度N(北纬)或S(南纬)字段5:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段6:经度E (东经)或W(西经)字段7:速度,节,Knots 字段8:方位角,度字段9:UTC日期,DDMMYY格式字段10:磁偏角,(000 - 180)度(前导位数不足则补0)字段11:磁偏角方向,E=东W=西字段16:校验值编辑本段$GPVTG(地面速度信息)例:$GPVTG,89.68,T,,M,0.00,N,0.0,K*5F 字段0:$GPVTG,语句ID,表明该语句为Track Made Good and Ground Speed(VTG)地面速度信息字段1:运动角度,000 - 359,(前导位数不足则补0)字段2:T=真北参照系字段3:运动角度,000 - 359,(前导位数不足则补0)字段4:M=磁北参照系字段5:水平运动速度(0.00)(前导位数不足则补0)字段6:N=节,Knots 字段7:水平运动速度(0.00)(前导位数不足则补0)字段8:K=公里/时,km/h 字段9:校验值编辑本段$GPGLL(地理定位信息)例:$GPGLL,4250.5589,S,14718.5084,E,092204.999,A*2D 字段0:$GPGLL,语句ID,表明该语句为Geographic Position(GLL)地理定位信息字段1:纬度ddmm.mmmm,度分格式(前导位数不足则补0)字段2:纬度N (北纬)或S(南纬)字段3:经度dddmm.mmmm,度分格式(前导位数不足则补0)字段4:经度E(东经)或W(西经)字段5:UTC时间,hhmmss.sss 格式字段6:状态,A=定位,V=未定位字段7:校验值。